A Novel Fault-Tolerant Information Fusion Method for Integrated Navigation Systems Based on Fuzzy Inference


Abstract
1. Introduction
- (1)
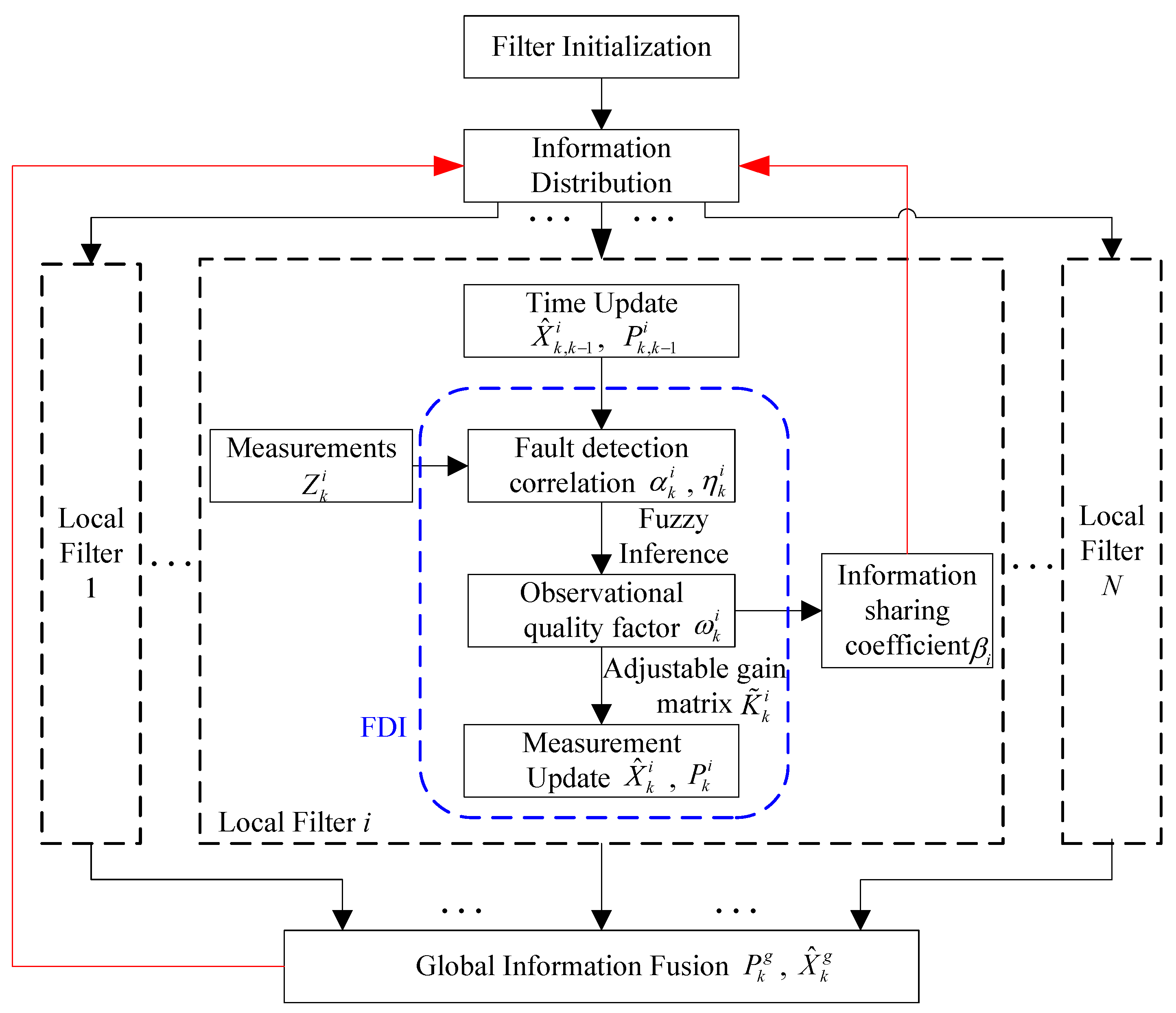
- Fuzzy inference is employed to map the filter innovation to the observational quality factor, enabling more sensitive detection of gradual faults.
- (2)
- The use of variable information sharing coefficients not only enhances the precision of the local filter but also improves the sensitivity of fault detection, particularly for gradual faults.
- (3)
- The proposed adaptive information fusion algorithm mitigates the impact of faults and significantly enhances the fault tolerance of integrated navigation systems.
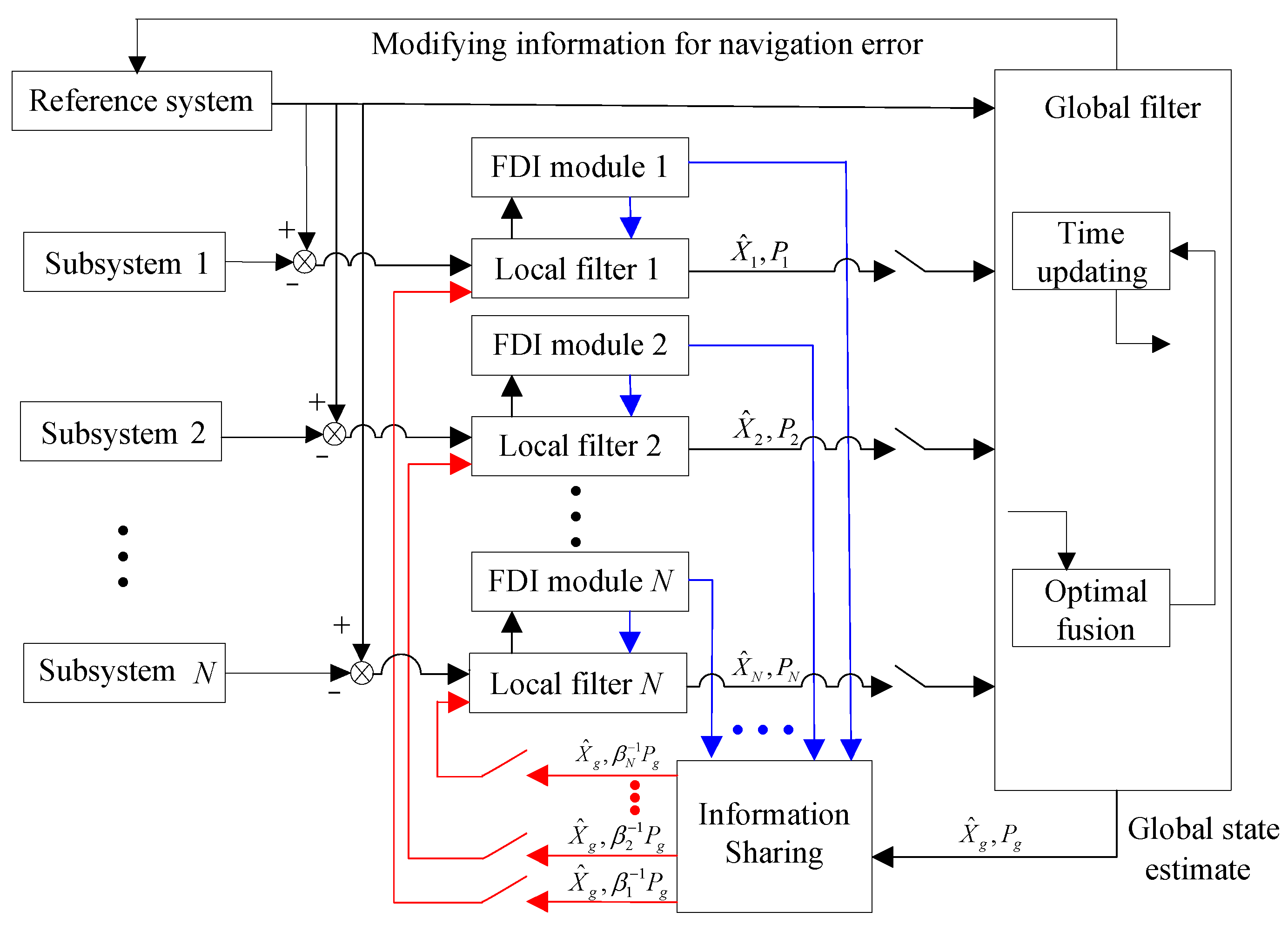
2. Federated Filter Based Fault-Tolerant Navigation System
2.1. System Structure
2.2. System Model
2.3. Classical Federated Filtering Algorithm
- (1)
- Information distribution
- (2)
- Local filtering
- (3)
- Information fusionwhere is the covariance matrix of global state estimation. is the global state estimation.
3. Fault-Tolerant Information Fusion Algorithm
3.1. Fault Propagation Analysis
3.2. Fault-Tolerant Local Filter Based on Fuzzy Inference
3.3. Adaptive Information Sharing
3.4. Fault-Tolerant Fltering Algorithm
4. Simulation Verification and Result Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kartal, S.K.; Leblebicioglu, M.K.; Ege, E. Experimental test of vision-based navigation and system identification of an unmanned underwater survey vehicle (SAGA) for the yaw motion. Trans. Inst. Meas. Control 2019, 41, 2160–2170. [Google Scholar] [CrossRef]
- Gryte, K.; Bryne, T.H.; Johansen, T.A. Unmanned aircraft flight control aided by phased-array radio navigation. J. Field Robot. 2021, 38, 532–551. [Google Scholar] [CrossRef]
- Savkin, A.V.; Verma, S.C.; Anstee, S. Optimal navigation of an unmanned surface vehicle and an autonomous underwater vehicle collaborating for reliable acoustic communication with collision avoidance. Drones 2022, 6, 27. [Google Scholar] [CrossRef]
- Indelman, V.; Williams, S.; Kaess, M.; Dellaert, F. Information fusion in navigation system via factor graph based incremental smoothing. Robot. Auton. Syst. 2013, 61, 721–738. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.L.; Shen, S.J. VINS-Mono: A robust versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Shamwell, E.J.; Lindgren, K.; Leung, S.; Nothwang, W.D. Unsupervised deep visual-inertial odometry with online error correction for RGB-D imagery. IEEE Trans. Pattern Anal. 2020, 42, 2478–2493. [Google Scholar] [CrossRef]
- Xu, Y.F.; Wang, Y.; Huang, R. Unsupervised learning of depth estimation and camera pose with multi-scale GANs. IEEE Trans. Intell. Transp. 2022, 23, 17039–17047. [Google Scholar] [CrossRef]
- Adusumilli, S.; Bhatt, D.; Wang, H. A low-cost INS/GPS integration methodology based on random forest regression. Expert Syst. Appl. 2013, 40, 4653–4659. [Google Scholar] [CrossRef]
- Zhao, L.; Kang, Y.Y.; Cheng, J.H.; Wu, M.Y. A fault-tolerant polar grid SINS/DVL/USBL integrated navigation algorithm based on the centralized filter and relative position measurement. Sensors 2019, 19, 3899. [Google Scholar] [CrossRef]
- Carlson, N.A. Federated filter for fault-tolerance navigation systems. In Proceedings of the IEEE PLANS ’88, Position Location and Navigation Symposium, Record. ‘Navigation into the 21st Century’, Orlando, FL, USA, 29 November–2 December 1988; pp. 110–118. [Google Scholar]
- Liu, Y.T.; Xu, X.S.; Liu, X.X. A fast gradual fault detection method for underwater integrated navigation systems. J. Navig. 2016, 69, 93–112. [Google Scholar]
- Sun, R.; Cheng, Q.; Wang, G.Y. A novel online data-driven algorithm for detecting UAV navigation sensor faults. Sensors 2017, 17, 2243. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Liu, F.; Xue, L.; Shan, B. Fault-tolerant SINS/Doppler Radar/Odometer integrated navigation method based on two-stage fault detection structure. Entropy 2023, 25, 1412. [Google Scholar] [CrossRef]
- Park, S.G.; Jeong, H.C.; Kim, J.W. Magnetic compass fault detection method for GPS/INS/Magnetic compass integrated navigation systems. Int. J. Control Autom. 2011, 9, 276–284. [Google Scholar] [CrossRef]
- Williamson, W.R.; Speyer, J.L.; Sharp, J. Fault detection and isolation for deep space satellites. J. Guid. Control Dynam. 2009, 32, 1570–1584. [Google Scholar] [CrossRef]
- Ahn, J.; Rosihan, R.; Won, D.H. GPS integrity monitoring method using auxiliary nonlinear filters with log likelihood ratio test approach. J. Electr. Eng. Technol. 2011, 6, 563–572. [Google Scholar] [CrossRef]
- Gao, G.L.; Gao, S.S.; Hu, G.G.; Peng, X. Spectral redshift observation-based SINS/SRS/CNS integration with an adaptive fault-tolerant cubature Kalman filter. Meas. Sci. Technol. 2021, 32, 095103. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. A multisensor navigation system based on an adaptive fault-tolerant GOF algorithm. IEEE Trans. Intell. Transp. 2017, 18, 103–113. [Google Scholar] [CrossRef]
- Liang, Y.Q.; Jia, Y.M. A nonlinear quaternion-based fault-tolerant SINS/GNSS integrated navigation method for autonomous UAVs. Aerosp. Sci. Technol. 2015, 40, 191–199. [Google Scholar] [CrossRef]
- Kang, J.; Xiong, Z.; Wang, R.; Zhang, L. Multi-layer fault-tolerant robust filter for integrated navigation in launch inertial coordinate system. Aerospace 2022, 9, 282. [Google Scholar] [CrossRef]
- Mohammadi, A.; Sheikholeslam, F.; Emami, M.; Mirjalili, S. Designing INS/GNSS integrated navigation systems by using IPO algorithms. Neural Comput. Appl. 2023, 35, 15461–15475. [Google Scholar] [CrossRef]
- Zhu, J.P.; Li, A.; Qin, F.J. A hybrid method for dealing with DVL faults of SINS/DVL integrated navigation system. IEEE Sens. J. 2022, 22, 15844–15854. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, P.T.; You, L.; Sun, J. Research on Kalman filter fusion navigation algorithm assisted by CNN-LSTM neural network. Appl. Sci. 2024, 14, 5493. [Google Scholar] [CrossRef]
- Or, B.; Klein, I. A hybrid model and learning-based adaptive navigation filter. IEEE Trans. Instrum. Meas. 2022, 71, 2516311. [Google Scholar] [CrossRef]
- Zhao, G.L.; Wang, J.B.; Gao, S.; Jiang, Z.H. A GNSS/SINS fault detection and robust adaptive algorithm based on sliding average smooth bounded layer width. Meas. Sci. Technol. 2024, 35, 106308. [Google Scholar] [CrossRef]
- Geng, Y.R.; Wang, J.L. Adaptive estimation of multiple fading factors in Kalman filter for navigation applications. GPS Solut. 2008, 12, 273–279. [Google Scholar] [CrossRef]
- Miloud, H.; Abdelouahab, H. Improving mobile robot navigation by combining fuzzy reasoning and virtual obstacle algorithm. J. Intell. Fuzzy Syst. 2016, 30, 1499–1509. [Google Scholar] [CrossRef]
- Abdolkarimi, E.S.; Mosavi, M.R. Wavelet-adaptive neural subtractive clustering fuzzy inference system to enhance low-cost and high-speed INS/GPS navigation system. GPS Solut. 2020, 24, 36. [Google Scholar] [CrossRef]
- Taghavifar, H.; Mardani, A. A knowledge-based Mamdani fuzzy logic prediction of the motion resistance coefficient in a soil bin facility for clay loam soil. Neural Comput. Appl. 2013, 23, S293–S302. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S | M | B | ||
| L | R | WR | UR | |
| E | SR | R | UR | |
| G | R | WR | UR | |
| Time | Faulty Subsystem | Fault Type | Fault Description |
|---|---|---|---|
| 150 s~200 s | GPS | Gradual | An error with a 0.06 m/s change rate is added to the GPS outputs. |
| 450 s~500 s | OD | Gradual | An error with a 0.0008 m/s2 change rate is added to the OD outputs. |
| 75 0s~770 s | GPS | Abrupt | The GPS output is frozen at its 749 s value. |
| 1010 s~1030 s | OD | Abrupt | The OD switches to zero outputs. |
| 1160 s~1200 s | GPS | Abrupt | A 50 m constant error is added to the GPS outputs. |
| 1600 s~1650 s | OD | Abrupt | A 1 m/s constant error is added to the OD outputs. |
| Parameter | Method 1 | Method 2 | Proposed Method | |
|---|---|---|---|---|
| δVe (m/s) | Max | −0.213 | −0.231 | −0.093 |
| STD | 0.038 | 0.036 | 0.027 | |
| δVn (m/s) | Max | 0.178 | 0.198 | 0.083 |
| STD | 0.037 | 0.034 | 0.023 | |
| δL (m) | Max | 5.182 | 5.145 | 1.908 |
| STD | 1.153 | 0.970 | 0.652 | |
| Δλ (m) | Max | −5.332 | −5.813 | −1.861 |
| STD | 1.189 | 0.974 | 0.620 | |
| Parameter | 150~200 s | 750~770 s | 1160~1200 s | ||||
|---|---|---|---|---|---|---|---|
| Max | STD | Max | STD | Max | STD | ||
| Method 1 | δVe (m/s) | 0.025 | 0.0090 | 0.051 | 0.0088 | −0.052 | 0.0120 |
| δVn (m/s) | 0.077 | 0.0180 | 0.048 | 0.0151 | 0.154 | 0.0340 | |
| δL (m) | 3.443 | 1.0070 | 1.273 | 0.2714 | 4.446 | 1.0100 | |
| Δλ (m) | 2.068 | 0.6201 | 1.132 | 0.2827 | 1.182 | 0.4653 | |
| Method 2 | δVe (m/s) | 0.022 | 0.0086 | 0.054 | 0.0076 | −0.038 | 0.0198 |
| δVn (m/s) | 0.060 | 0.0121 | 0.066 | 0.0145 | 0.132 | 0.0321 | |
| δL (m) | 2.729 | 0.8146 | 0.979 | 0.1203 | 2.850 | 0.7238 | |
| Δλ (m) | 1.081 | 0.3418 | 1.157 | 0.2923 | 0.392 | 0.2408 | |
| Proposed Method | δVe (m/s) | 0.021 | 0.0085 | 0.047 | 0.0046 | −0.032 | 0.0110 |
| δVn (m/s) | 0.054 | 0.0087 | 0.047 | 0.0057 | 0.080 | 0.0207 | |
| δL (m) | 1.774 | 0.4836 | 0.961 | 0.1181 | 1.787 | 0.5354 | |
| Δλ (m) | 0.589 | 0.2039 | 0.955 | 0.2192 | 0.384 | 0.1787 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Zhang, M.; Zhou, L.; Cai, T. A Novel Fault-Tolerant Information Fusion Method for Integrated Navigation Systems Based on Fuzzy Inference. Sensors 2025, 25, 1624. https://doi.org/10.3390/s25051624
Zhu Y, Zhang M, Zhou L, Cai T. A Novel Fault-Tolerant Information Fusion Method for Integrated Navigation Systems Based on Fuzzy Inference. Sensors. 2025; 25(5):1624. https://doi.org/10.3390/s25051624
Chicago/Turabian StyleZhu, Yixian, Minmin Zhang, Ling Zhou, and Ting Cai. 2025. "A Novel Fault-Tolerant Information Fusion Method for Integrated Navigation Systems Based on Fuzzy Inference" Sensors 25, no. 5: 1624. https://doi.org/10.3390/s25051624
APA StyleZhu, Y., Zhang, M., Zhou, L., & Cai, T. (2025). A Novel Fault-Tolerant Information Fusion Method for Integrated Navigation Systems Based on Fuzzy Inference. Sensors, 25(5), 1624. https://doi.org/10.3390/s25051624