1. Introduction
The healthcare sector exploits Internet of Things (IoT) technologies to improve both patient care and health outcomes by leveraging the basics of smart city infrastructures [
1,
2]: equipping ambulances with IoT sensors to transmit patients’ condition from ambulances to hospitals allows medical staff at the hospitals to determine and prepare any necessary patient treatment in advance [
3,
4,
5]. Ramesha et al. [
6] extend this by connecting ambulances to traffic control units for uninterruptedly routing the ambulances through synchronised traffic lights, which might be turned green alongside the route to the hospital, thereby reducing the time needed to get patients to the hospitals. Given the time-sensitive nature of ambulances rushing patients to hospitals, it is equally essential that the patient data are transmitted from the IoT-equipped ambulances to the hospitals as quickly as possible to give as much time as possible to the medical staff at the hospitals to prepare for incoming patients adequately. Due to the mobile nature of ambulances, the straight transmission of data from the ambulances to the hospitals is likely to be unstable due to unpredictable environmental obstacles, high vehicle speeds, and traffic congestion. These issues lead to highly dynamic network topologies, requiring roadside units (RSUs) as edge nodes to ensure a constant, stable network connection for the ambulances. RSUs can then collect patient data from nearby ambulances and forward them to the relevant hospitals for processing. In e-health applications, particularly during emergency medical transportation, the Quality of Service (QoS) requirements are stringent, with a necessity for low-latency and high-reliability communication channels. This ensures that patient data transmitted from IoT-enabled ambulances to hospitals are received without delay or loss, enabling timely medical interventions [
7]. To ensure the effectiveness of IoT systems in real-world settings, researchers have stressed the importance of accurately modelling and simulating such systems [
8]. As more patient data will be streamed and collected within smart cities, the network infrastructure must handle the data transfer and processing of the transmitted information in real time, where both mobile and static IoT devices coexist. The patient data will include real-time data collected from patients’ wearable devices [
9] while at home, creating an extremely interconnected scenario which will severely increase the amount of Internet traffic within the Osmotic infrastructure. In the context of such healthcare transportation research, advanced simulation platforms are critical to evaluating and improving patient transportation strategies, including testing the necessary network infrastructure. Despite the importance of trace data for network simulators, there is limited public availability [
10,
11,
12], which has led to the generation of traces either from real-world traffic data or, in some cases, synthetic traces generated using simulators. This research extends SimulatorBridger [
13] into SimulatorOrchestrator (
https://github.com/LogDS/SimulatorOrchestrator/releases/tag/v1.0, accessed on the 1 March 2025) to allow for the direct ingestion of real-time IoT communication events coming from another simulator external to the VANET, while also considering possible minimal extensions of the simulator enabling a 6G infrastructure via cell-free networks. As a use case of the former, we consider patients’ digital twins generating traffic to update clinicians via the cloud in real time on the health conditions of the patient recovering at home. This is an important step, as it showcases the possibility of extending this simulator to a general-purpose orchestrator of different simulators, contextually generating events of interest.
As with [
1], the UK’s new NHS (National Health Service) electric vehicle initiative to help reduce its carbon footprint [
14] was a driving force behind choosing the healthcare sector for the simulated use case of SimulatorOrchestrator. As a result of these advancements, our previous work related to SimulatorBridger [
1] was extended to handle patient health information transmitted by IoT devices during the transport process and accurately simulate scenarios in which electric ambulances (EAs) are used to transport patients whilst ensuring the timely and secure transmission of health data. This motivates our extension of the former to further support patient IoT data beyond vehicular patterns. In the present paper, we extend the former solution to include new communication events that might be while also including data that can be streamed in real time by home patient care requiring ad hoc monitoring. Adding an external patient simulator required us to extend the simulator further to address the possibility of making multiple simulators interact and be orchestrated to simulate one scenario of interest. This required a major architectural restructuring of the initial work, thus leading to a novel simulator named SimulatorOrchestrator (See RQ №2.).
From the communication architecture perspective of a 5G network supporting SD-WAN Osmotic infrastructure, this paper addresses the main limitation of our previous work [
1]. The choice of
MicroELements software component [
15] (MEL) allocation policy originally had no impact on network behaviour. If a communication was initiated from a device near a busy edge node with bottlenecked MELs, it had to be processed by one of those bottlenecked MELs. If all the MELs were bottlenecked, no impact should be expected. By leveraging the 6G architecture and by assuming that all the first-mile edge nodes (APs being RSUs) are connected in a metropolitan area network (MAN) token ring network, we aim to load balance the transmission of packages better; we can avoid bottlenecking by re-forwarding the packet to a “quieter” edge subnetwork, i.e., a network having less traffic allocation (
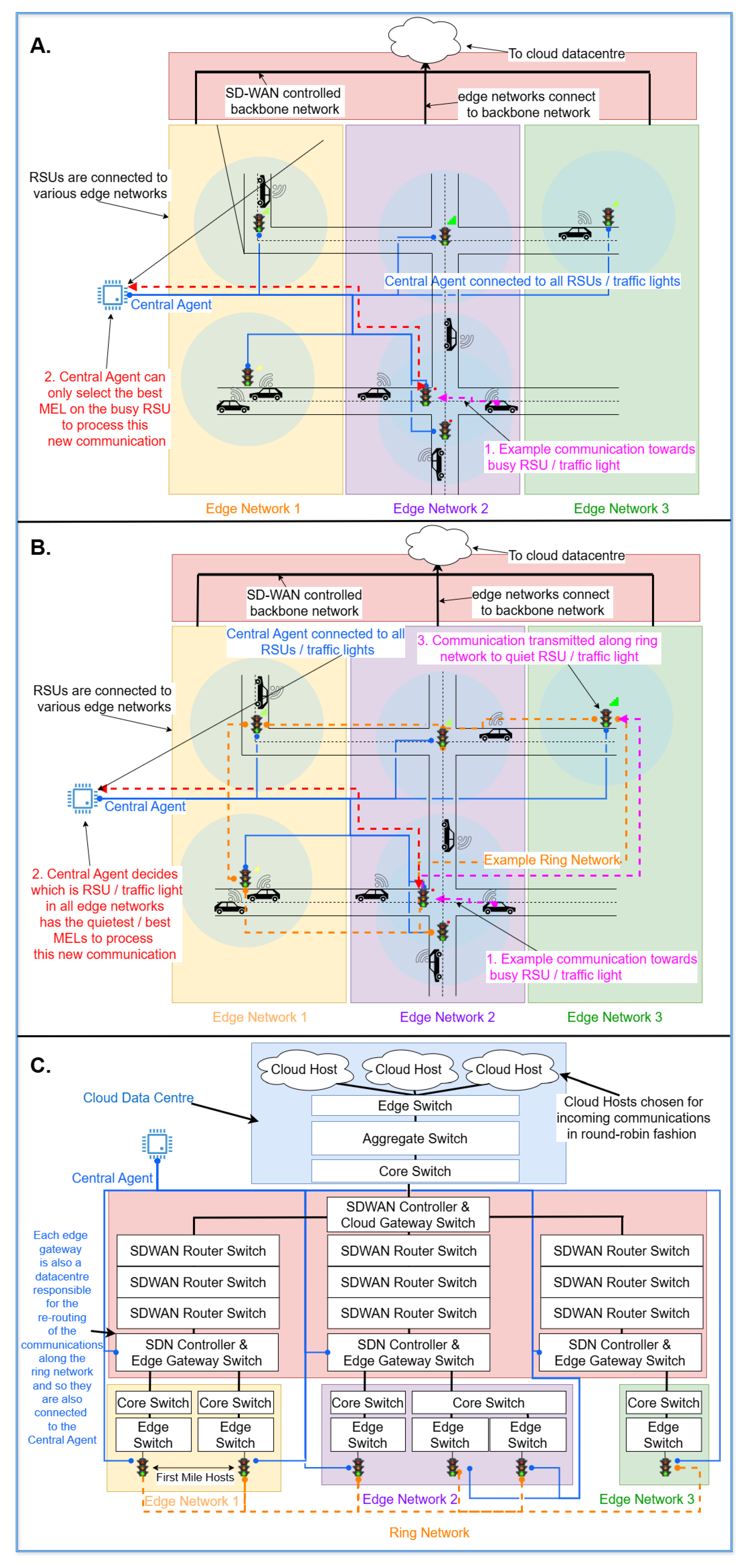
Figure 1). Our paper shows the effectiveness of exploiting the Million Instruction Per Second (MIPS) allocated to each MEL component supporting the packet transmission (
Section 3.3.3). The paper addresses the following research questions:
- RQ №1.
It is possible to minimally extend an Osmotic Simulator also to support 6G cell-free architecture, comparing ‘A’ with ‘B’ on
Figure 1: After observing that
(i) both can operate on software-defined networks (SDN) [
16,
17],
(ii) there exists a parallelism between edge nodes associated with computing abilities (
Section 2.2) [
18] and the user-centric cell-free massive multiple-input multiple-output (UC CF-mMIMO) access points (APs) (
Section 2.1),
(iii) the parallelism between Osmotic Central Agents [
13,
18] and cell-free Central Processing Units [
19,
20,
21], and
(iv) given that SimulatorOrchestrator supports all of the aforementioned Osmotic architecture features via SimulatorBridger [
13], then our previous simulator SimulatorBridger can be minimally extended also to simulate cell-free architectures (
Section 3.2). By assuming almost simultaneous communication across the edge nodes belonging to the same MAN through a Gigabit Token Ring (
Section 3.3.3), it is possible to establish connections across different area networks, thus breaking the rigid cell and edge network structure.
- RQ №2.
It is possible to orchestrate a network simulator with another one providing additional packet transmission events to the former: By extending the interface of our previous simulator, SimulatorBridger, to run only within subsequent time intervals (
Section 3), and by allowing the possibility of pause for then resuming the simulation, it is possible to concurrently run it alongside other simulators, generating potential new packet transmission events (
Section 3.2). In this paper, we take into consideration patient digital twins transmitting healthcare data to the cloud (
Section 3.3.2) running on a pre-initiated MQTT protocol (
Section 2.3), and separated from vehicular ad hoc network (VANET) or Connection Counting [
1] inputs for vehicular traffic (
Section 3.3.1).
- RQ №3.
The combined provision of SD-WAN and cell-free architectures enables efficient packet routing algorithms ensuring QoS: Given the fulfilment of RQ №1., we propose a new MEL allocation policy crossing the boundaries of a single-edge network (
Section 4.3) which, when combined with our previously introduced MCFR algorithm (
Section 4, [
22]), effectively reduces the number of active communications while increasing the packet rate (
Section 5). This solution outperforms routing algorithms working on a 5G architecture not working on a cell-free assumption. This is achieved by centralising the execution of the routing algorithm at the Central Agent/central processing unit (CPU) level rather than at the single-edge gateway, as in [
17], thus allowing the re-route of each packet to be sent to the cloud via a specific “quiet” (e.g., non-busy) network. On
Figure 1, ‘C’ shows a simplified model of our simulated network architecture, as we route communications from the IoT devices to a cloud data centre via edge and backbone networks.
Figure 1.
Showcasing the main differences in the routing algorithms between the ones from the Osmotic architecture [
1] (
A) and the others from our proposed Osmotic/cell-free architecture ((
B),
Section 4). (
C) shows the main architectural overview of all the sub-networks simulated within our meta-simulator (
Section 3.3.3). The colours of the lines and the text are coordinated, the colour of the text indicates which aspect of the plot they are explaining - and the numbered texts are to be read in ascending order.
Figure 1.
Showcasing the main differences in the routing algorithms between the ones from the Osmotic architecture [
1] (
A) and the others from our proposed Osmotic/cell-free architecture ((
B),
Section 4). (
C) shows the main architectural overview of all the sub-networks simulated within our meta-simulator (
Section 3.3.3). The colours of the lines and the text are coordinated, the colour of the text indicates which aspect of the plot they are explaining - and the numbered texts are to be read in ascending order.
We investigate this by generating realistic traffic patterns expressed as mobility traces (MTs) through SUMO. We choose to consider those occurring in Bologna (
https://github.com/DLR-TS/sumo-scenarios/tree/main/bologna/acosta, accessed on 1 March 2025), a renowned healthcare smart city, which was extended by placing three patients, one with a higher risk factor than the previous one, at 15 of the 16 edge nodes in the smart environment. At the final edge node, we placed five patients for each risk level to model a hospital with patients at different recovery levels.
6. Discussion
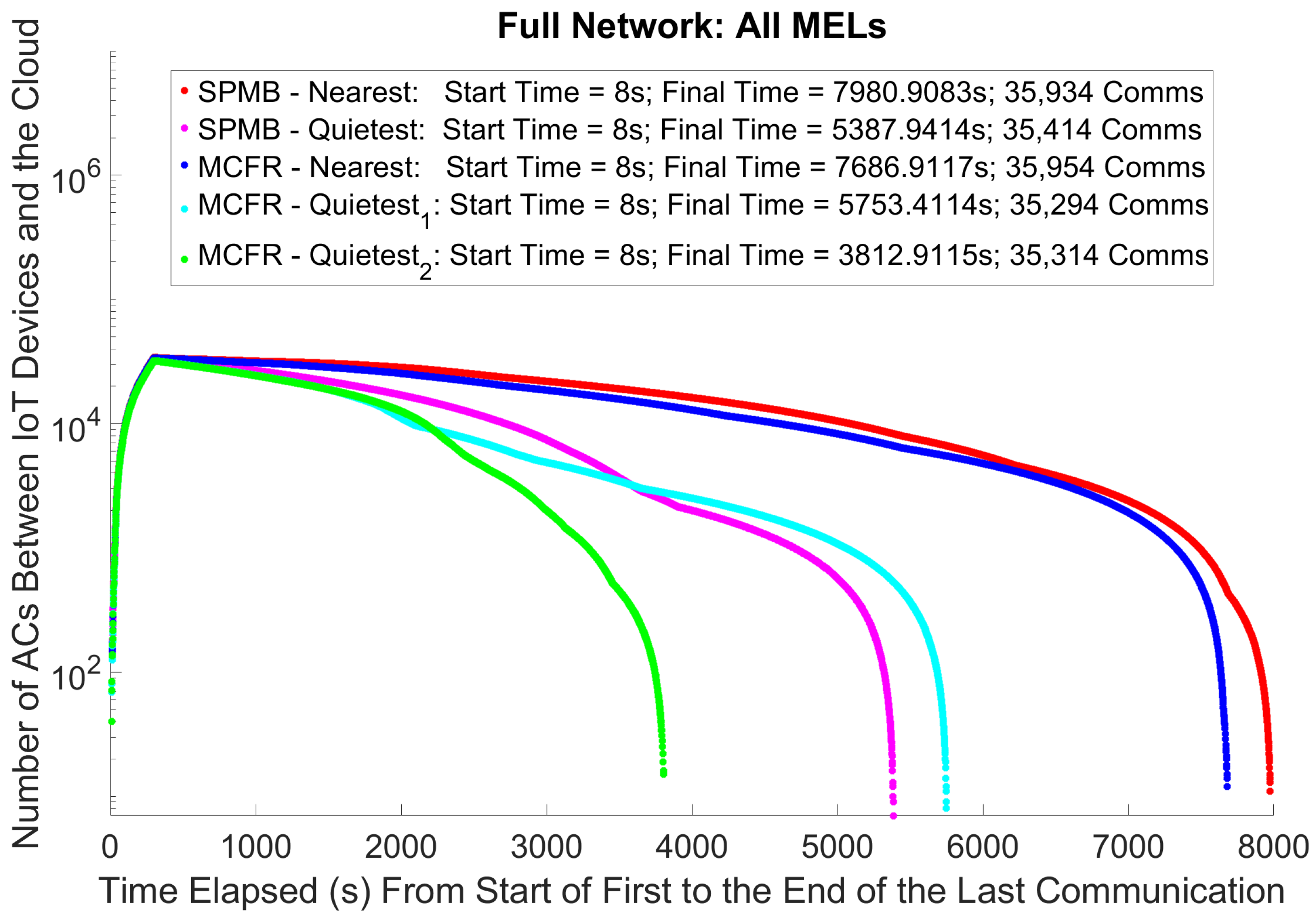
The simulator simulates 300 s of vehicular mobility, generating 34,000–36,000 communications, resulting in 3800–8000 s (i.e., ≈1H to ≈2H and 30 min) of overall simulated time (see
Table 4) for transferring the data packets from the IoT devices or patients to the cloud via the entire communication infrastructure. The real time needed to simulate these runs varied quite widely (
Section 5.5). Such variation ultimately depends on the architecture (5G or 6G), its Osmotic configuration, and the routing algorithm. This relatively long simulator runtime, ≈1 h for the Quietest configurations, also justifies our simulator accounting for just the Presentation and Session layers of the OSI stack; despite the fact that we simulated thousands of seconds of network behaviour, it still is only a consequence of IoT network traffic generated within the first 300 s of the simulation. Due to this, wireless communication simulation will not account for real-world network behaviours such as contention [
58]; notwithstanding the former, our simulator is consistent with previous network simulators’ assumptions in this domain, simulating only the required OSI layers for this work (
Section 2.2), particularly IoTSim-Osmosis-RES [
18], which was the basis for our initial SimulatorBridger work. This decision was taken because the original IoTSim-Osmosis-RES simulator also works on SD-WAN networks, thus justifying our modelling choice.
In our previous work [
1], the connection-counting approach mapped each counted communication to a fresh IoT device at a given time. Using communication counting for healthcare devices associated with patients required a more precise mapping, which was then revised in the current pipeline. As a result, the round-robin per IoT device policy would send all communications in a given area to the same MEL, as all the counted devices communicated only once. As we now possess the information of which device originates the communication in the form of the patient ID from the patient sending the data and vehicle ID from the mobility traces, we can better simulate the overall network behaviour, thus resulting in a more faithful simulation of the round-robin per IoT device policy.
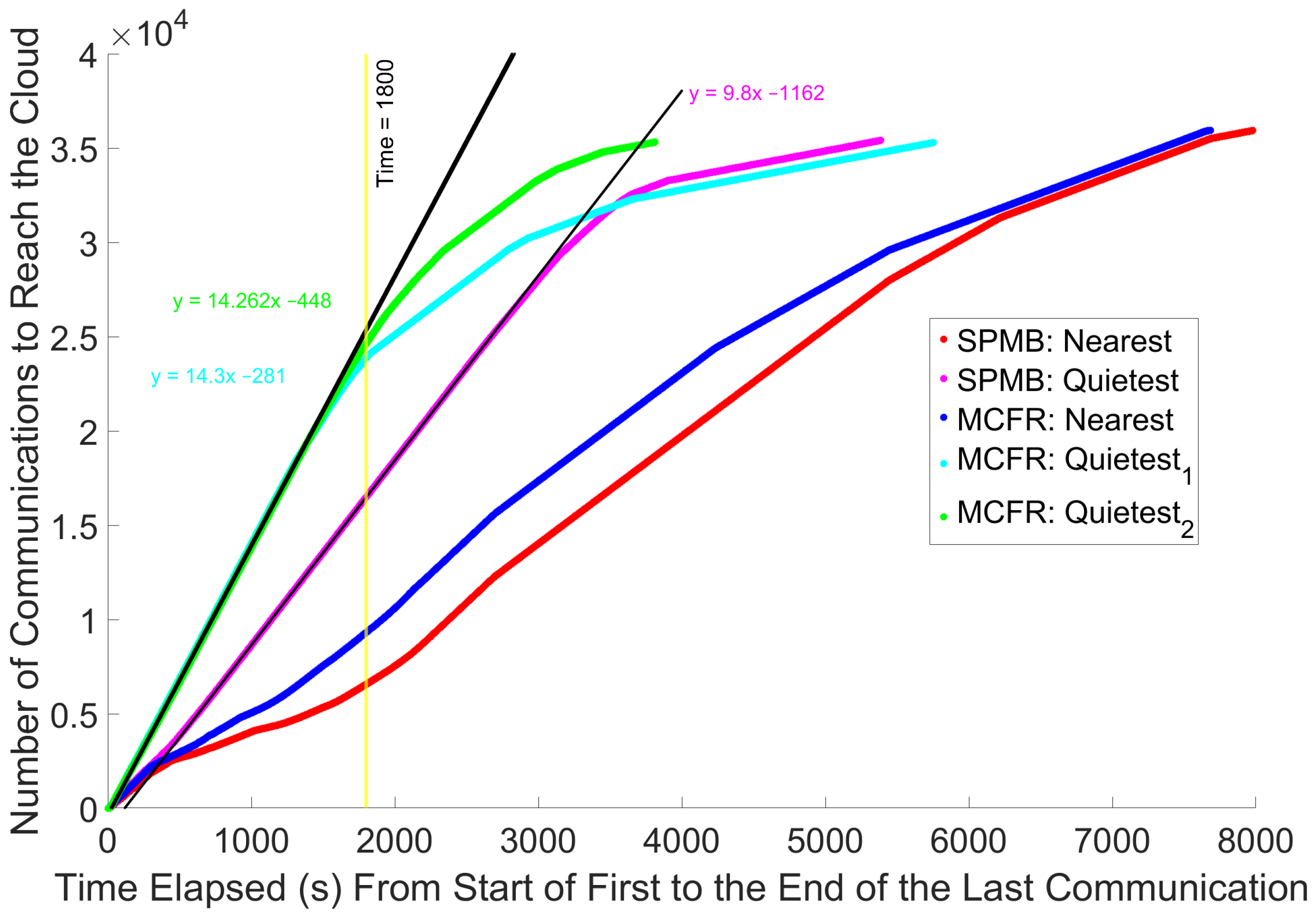
The SPMB algorithm did not result in the overall fastest total transmission time despite resulting in the best average edge processing times per communication,
Table 3), suggesting that the MCFR algorithm is better suited for routing a realistic network load from the IoT devices to the cloud. In [
22], both SPMB and MCFR were stress tested for the 3G, 4G, and 5G cellular networks, and the results showed that the optimal algorithm was dependent on the cellular network in use, although the differences were small. With a more realistic workload in this work, MCFR, compared to SPMB, resulted in a shorter overall transmission time of all the communications from the IoT devices to the cloud data centre. This was true when comparing the two ‘Nearest’ configurations and when comparing the SPMB Quietest with MCFR
. Additionally, despite the faster edge processing rate, compared to
,
Table 3, SPMB Quietest, was still slower at transferring communications to the cloud,
Figure 7). This can only result from less efficient and slower routing of the communications from the MELs to the cloud. This is a result of the MCFR algorithm aiming to choose the best route for communication through the network, with the smallest latency, and not simply the shortest path, like SPMB.
The fact that the round-robin policy per IoT per device, , outperformed the round-robin policy per MEL, for MCFR may initially seem counter-intuitive as should be more evenly distributing the communications across the network. However, due to the specific behaviour of the MCFR algorithm, this is not the case. The MCFR algorithm, when choosing a network link between network nodes within the SDN-controlled data centres, aims to choose the link with the highest bandwidth. The algorithm minimises the usage of the specific links between individual hosts and their connected aggregate switches. It maximises the number of links the bandwidth available to the aggregate switches needs to be shared between. This is due to causing every MEL, and therefore every edge node/host, to transmit a communication per MEL up the tree network towards their connected aggregate switch, using a share of the bandwidth. The result of MCFR is a network saturated with partially used links, each using an equal share of the bandwidth total available to the aggregate switches. MCFR and the round-robin policy per MEL work against each other, slowing the network. In contrast, MCFR , only uses one link towards the aggregate switches at a time. Each first communication from the vehicle is towards the same MEL on a given edge node/host, meaning the bandwidth available to the aggregate switch can be fully utilised on the link connecting it to that host. The second vehicular communication might then move to a different edge network entirely, keeping these communications from affecting the transmission of the first. MCFR is not immune to the network saturation issue affecting MCFR . In cases of many connecting IoT devices starting the first communication at different times, there will be instances in which multiple hosts within an edge network are simultaneously transmitting towards the same aggregate switch, which will lower the availability of each link. However, this issue is not due to a core aspect of the algorithm, meaning the network will self-correct as the number of simultaneously communicating devices reduces. Additionally, this can be mitigated with MCFR by adding more edge networks, as this will allow the number of simultaneously communicating devices to increase before there is a hit to the network. Finally, despite this issue, MCFR , with this saturation issue, still performs significantly better than the 5G cellular MEL-allocation policies, meaning this is not a disqualifying issue for MCFR , for which this is a temporary issue which only arises when the network becomes particularly busy. This saturation issue motivates any future work to make additional improvements to the network to obtain the maximal benefit from the MCFR algorithm.
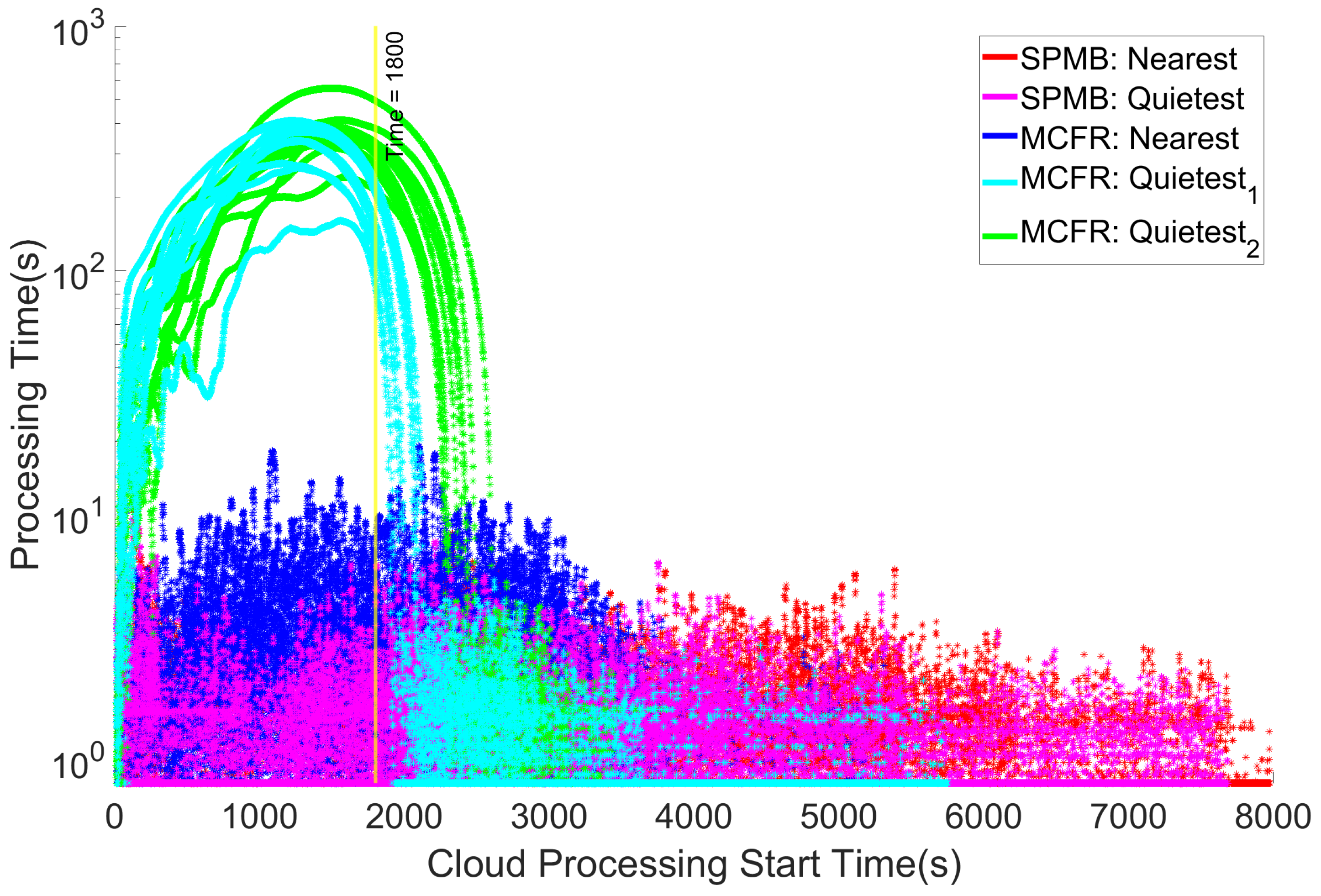
To make the most of the MCFR Quietest configurations, particularly
, as this was otherwise the best performing algorithm, further improvements must be made to address these increasing cloud processing times. One solution could be a more proactive approach to MEL selection. The SPMB Quietest algorithm resulted in the lowest average edge processing time per communication (
Figure 5), due to the selection of the best MEL in real time to process a given communication based on its available MIPS. The MCFR algorithms could not make use of this data due to the algorithm scheduling routes through the network earlier (
Section 4.3.2), and so the MIPS data available at the MEL selection would be out of date by the time a given communication was actually being processed. However, a predictive approach could be implemented, potentially training an A.I. model to select MELs based on the likely workload of the MELs when they process the communication. Combining this approach with the MCFR
approach to form a weighted round-robin per IoT device, where the algorithm would factor the likely available MIPS, would gain the improved MEL processing from the SPMB Quietest algorithm whilst maintaining the improved routing through the network from the MCFR algorithm. This will also motivate the need for AI to provide greater support in decision-making processes, especially related to learning more flexible routing policies.
Simpler solutions could be implemented: we plan to improve the limiter algorithm. The limiter could be set network-wide, limiting the rate at which communications can be transferred to the cloud to below 14.3 and closer to 9.8 (
Figure 7); the limiter could be tuned to rely on bandwidth and not a fixed limit; or the limiter could even be made explicitly time-based, only allowing the transmission of a set number of communications per second. The drawback of these solutions is that they would inevitably slow down the overall transmission of communications from the IoT devices towards the cloud. Therefore, further analysis will also consider other possible ways to improve cloud processing times by calibrating the processing power or potentially adding more cloud data centres for processing the incoming load of IoT data rather than the single one encompassed by both our simulator and previous Osmotic simulators [
31]. The benefit of these approaches is that they would not require intentionally slowing down the overall transmission of communications towards the cloud. They would, however, require additional costs and resources if deployed in a real smart city, which tuning the limiter algorithm would not. The best compromise solution most likely encompasses a fine-tuned combination of adding additional computational power/cloud data centres and an improved limiter algorithm.
As outlined in
Section 4.3.2, when discussing Quietest policies and with reference to Algorithm 2, when the Central Agent needs to simultaneously reallocate MELs for
communications at the same time, the Central Agent will find the best MELs in
quietMELs (Line 3). Next, the
communications will be sent to the MELs nearest their originating IoT device (Line 10). However, two issues might occur. First, multiple communications initiated from the same area might end up to the same nearest MEL. As a result of this “multi-reallocation”, there will be MELs from
quietMELs which do not obtain any communication while others might obtain more than one. This will unnecessarily slow down the processing of some communications as the MELs that receive communications now need to split their processing capabilities across multiple communications. Second, the algorithms keep track of how many times the Central Agent makes a MEL available for allocation, not how many communications are sent along the ring network to each MEL. In the former scenario, all MELs, regardless of how many communications they each receive, will be treated the same moving forward, as if they each received one communication (Lines 5 and 6). In future allocations, some of these MELs will be quieter than the Central Agent thinks, while others will be busier. This can lead to the network’s overall efficiency falling, as the Central Agent’s view of which are the quietest MELs is no longer perfect.
Notwithstanding the issues above, which mainly affect the MCFR Quietest algorithms, when using MCFR
, the total transmission time to route all communications from the IoT devices to the cloud was reduced by 42.35% compared to MCFR Nearest. This was 17.61% faster than the SPMB Quietest; see
Figure 4. As such, amending this algorithm to count how many communications are routed along the ring network to a MEL will more accurately track the total connections between each MEL and the cloud. This will distribute the network traffic more effectively and lead to even further reductions in the total transmission time for all communications from the IoT devices to the cloud.
While designing our simulator, we implicitly assumed that all the edge nodes belong to the same municipality area, thus assuming that all the edge nodes will be automatically connected to the token ring. On the other hand, if we assume to simulate different smart cities together, this will automatically connect multiple edge devices to the same token ring. Future works will consider extending the simulator better to isolate edge networks into different and separate token rings; for example, multiple cities could each have their own ring networks and then send their data to the same cloud data centre. This means data still need to be routed from the edge nodes to the cloud data centres; the ring network aids the Central Agent in identifying and selecting the optimal edge node within a smart environment from which to send a given communication. This would also require extending the current simulator to simulate token ring networks’ behaviour and interaction. Additionally, as outlined in
Section 2.1, 6G aims to mitigate the location-based issues within cellular networks. As deploying specialised APs for non-urban communications might be costly, we might consider extending our Orchestrator to support satellite-terrestrial networks (STNs), enabling 6G communications [
59]. In this regard,
Interlink [
60] helps reduce the handover delay occurring through their handover scheme
Asher. Handover is caused by mobility devices switching satellites as they move in and out of range of different satellites, which are also moving. This is enabled by the usage of a digital twin network (DTN) for better determining the satellite routing and handover scheme across satellites. The same technology might also simulate satellite communications at a WAN or interplanetary scale.
This technology could also have an application to SimulatorOrchestrator, allowing for the simulation of many municipalities, each sending their data towards the cloud whilst keeping track of the vehicles and patients as they traverse the different municipalities. Each municipality could also have a smaller cloud data centre to share its data with a larger centralised data centre. As in the current work, the IoT devices, patients, or vehicle sensors communicate with the edge nodes in urban environments. Still, they would switch to communicating with satellites when not within the core urban areas. The necessary patient and vehicle data would then be routed from the IoT devices towards the cloud data centre via the satellite through dedicated edges. This would require considering the satellite communication simulator as a more advanced version of a digital twin, both accepting communicating events and generating new ones, to route communications across multiple municipalities. The increased number of edge nodes and cloud data centres within the simulated scenario would lead to further simulation overheads, as the additional nodes might generate even more communications.
Last, given the nature of the routing algorithms, our simulator must keep precise track of where the agents are located and whether they intend to start a communication. Given that this simulation embodies the interactions between multiple agents, be they communication nodes or the IoT devices (patients and vehicles), and Central Agents deciding at runtime to re-route the packets and change the communication channels, and given that this simulation is performed sequentially, it becomes evident that an increased number of agents and communications will hamper the scalability of the simulator. This issue can only be partially solved through concurrency, as these solutions could only account for constant factor improvements in the running time, which is still negligible compared to the complex interactions between agents within the simulator. Similar considerations can be addressed by changing the programming language or platform to simulate this. Due to the inherent difficulty of the problem, we believe that the only possible way to improve scalability is to jointly handle communications and strategies while avoiding dealing with one single event separately. Conversely, this solution will deter the realism of the simulation, thus not allowing the tracing of the actual interactions occurring within the simulation. Future works will address novel methodologies addressing the trade-off between simulation realism and scalability.
7. Conclusions and Future Works
Variations in the number of active communications between MCD and MT raise critical questions about how different communication strategies, instantiated by multiple or fewer devices, affect cloud data processing times. Understanding how MEL-allocation policies within edge and cloud devices influence communication times is essential. This is particularly relevant when processing medical data on the cloud, where the efficiency of handling vast amounts of sensitive information is crucial. Understanding the relationships between the Osmotic network and the 6G architecture infrastructure is imperative to ensure timely and accurate data processing in healthcare. Exploring further optimal cloud architecture designs in such high-load scenarios could increase processing efficiency and reduce latency, thereby improving the reliability and effectiveness of cloud-based medical services. Understanding how different configurations affect data processing times can lead to improved cloud architectures that enhance the performance and reliability of healthcare applications. As remarked by the latest results on Osmotic architecture [
15,
31], by optimising the handling of connections and the overall network performance, we can ensure more efficient and effective management of data in Smart City scenarios, ultimately leading to better patient outcomes and more reliable healthcare services.
This paper presents for the first time an extension of an Osmotic simulator for better supporting a 6G architecture by exploiting a cell-free architecture by working upon the Central Agent assumption for orchestrating the Edge networks from our previous paper [
13], where there is always a direct link between Edge devices and Central Agent by leveraging the assumptions from the previous literature on Software Defined Network architectures [
18]. We simulate cell-free massive MIMO (CF mMIMO) by assuming that all the Edge nodes are also connected in a Gigabit Ring Network, via which the packet is dispatched towards the best Edge device that then, in turn, starts to transmit the packed to the cloud via the entire network infrastructure. Experiments show that the combined provision of a novel SDN routing algorithm first proposed in our previous work [
22] alongside the cell-free assumption significantly improves the transmission times of the packets on the network. This preliminary work shows the possibility of improving the 5G architecture solutions to meet the 6G technology criteria of ultra-low latency, massive connectivity, and highly reliable communication features, which are also crucial for healthcare IoT applications.
Aside from addressing the improvements to SimulatorOrchestrator outlined in the previous section, future work will address how influencing vehicular traffic patterns impacts healthcare outcomes, expanding the system’s capabilities to account for broader network effects on patient monitoring and response times. This integration would further validate the system’s applicability to real-time IoT-based healthcare systems, offering insights into emergency response dynamics and network management under various vehicular traffic conditions. Additionally, future work will also make use of real-world data from the Newcastle Urban Observatory (
https://newcastle.urbanobservatory.ac.uk/, accessed on the 1 March 2025), replacing the generated patient data with data sampled from an urban scenario, albeit not strictly related to healthcare (pedestrian and vehicular mobility). At the time of writing, there were no publicly available datasets with real patient data streamed to a cloud data centre; for this work, we compromised using generated patient data, but incorporating real-world data will increase the utility of SimulatorOrchestrator.
In terms of security, existing IoT simulators, thus including the present one, often lack comprehensive communication and security features necessary for accurately modelling and mitigating real-time cybersecurity threats, such as battery-draining attacks. One key factor preventing many Osmotic simulators from adequately addressing security concerns is the lack of simulating the full OSI stack, particularly the lower OSI layers. For example, this work focussed on the Presentation and Session layers. As discussed within
Section 2.2, in line with other Osmotic simulators, we did not address all OSI layers within SimulatorOrchestrator due to concerns with computational complexity, and chose the Presentation and Session layers, as they were the most relevant to this work. Addressing this gap, the IoTSimSecure framework, as discussed in [
33], introduced a novel simulation tool specifically designed to mitigate battery depletion attacks and enhance the security and longevity of IoT devices in various smart environments, including healthcare. Future work will then outline which minor extensions are also required to capture the lower architectural layers required for the cybersecurity algorithms without needing the full OSI layer stack. As discussed above in
Section 6, any simulator needs to address the trade-off between realism and scalability, as such adding further OSI layers is likely to negatively impact the real-world runtime of the simulator without providing any additional benefit in terms of the collected information. It will therefore be important to carefully determine if adding lower OSI layers will come at the cost of the scale of future experiments, or perhaps allowing the choice within SimulatorOrchestrator on which layers are used, and ’disabling’ the simulation of, for example, the Presentation layer if it is not needed for the cybersecurity analysis. Given the proposed approach’s potential, future work will address the possibility of extending the main architecture by designing a full-bridged orchestrator interconnecting different simulators together in a cohesive view: by considering STNs, these would require the simulator to support digital twins, not only receiving but also accepting traffic data.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}