
Integration of DSRC, mmWave, and THz Bands in a 6G CR-SDVN


Abstract
1. Introduction
- (i)
- A novel scheme for 6G cognitive radio software-defined vehicular networks (CR-SDVNs) is proposed for the city scenario to find stable paths between the source and destination. Communication between two nodes is dependent on the number of available free channels that are provided to each link in forming a stable path. These free channels are sensed by an energy detector scheme that is implemented solely for each wireless technology. Three different technologies (DSRC, the mmWave band, and the THz band) are used to meet the needs of the growing numbers of vehicular users. The SDN controller is responsible for keeping data updated and switching among these three technologies.
- (ii)
- After finding the available channels, the two communicating nodes are allowed to transfer data to each other. Hence, considering the free channels and the link status, the final step is to find an optimal path from among the different available paths between the source and destination. This optimal path can be a combination of different wireless technologies, thereby providing a heterogeneous stable path for modern vehicles in a city environment.
2. Literature Review
3. The Integrated Protocol for a 6G CR-SDVN
3.1. Spectrum Sensing for DSRC, mmWave, and THz Bands
3.2. Path Selection Between the Source and Destination for Three Different Bands
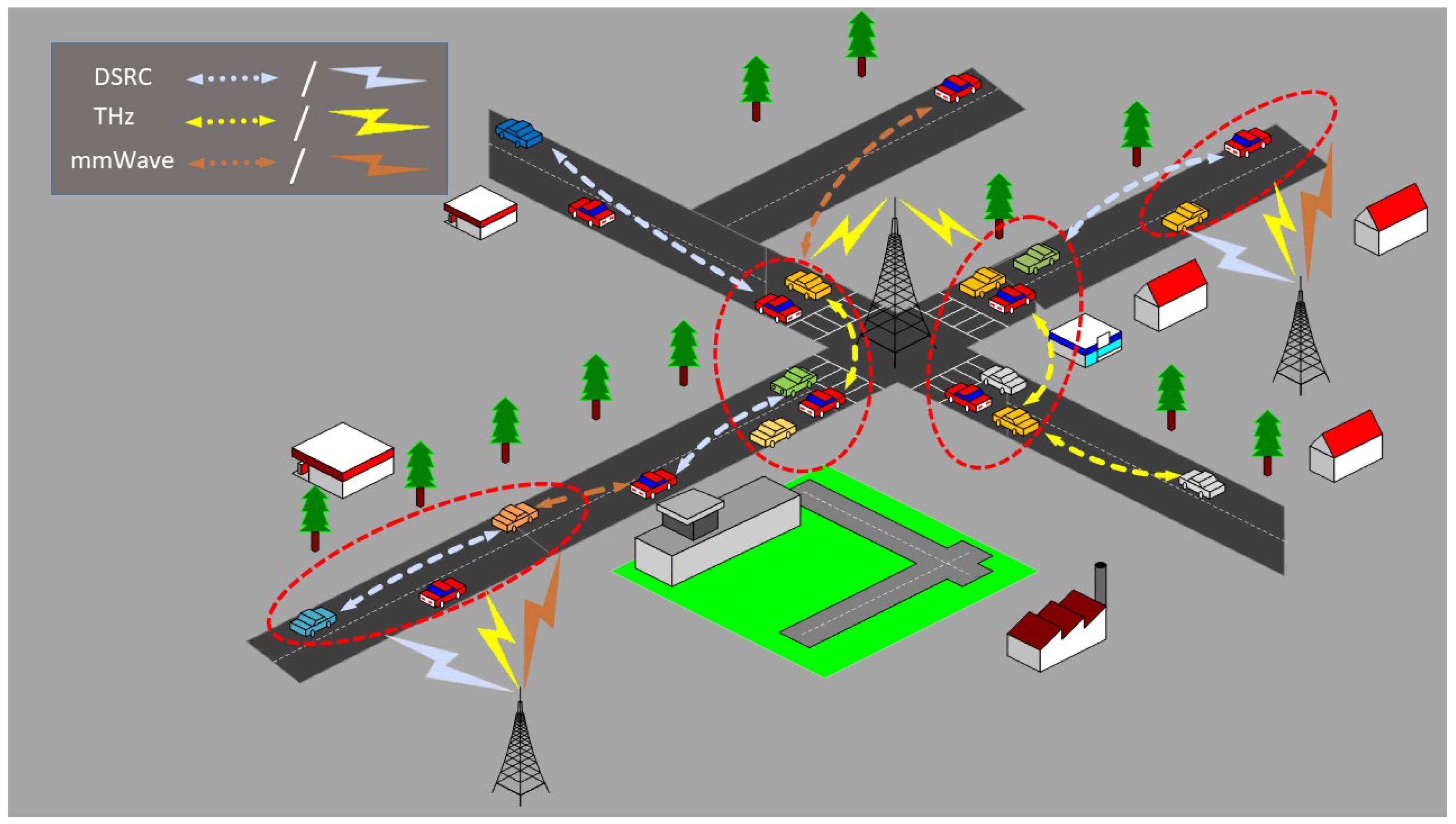
- Case i: (when the source vehicle is within the DSRC range) After exchanging sensing results with neighboring vehicles and the MC using a control channel, all nodes that act as relay nodes for the source store that information in their flow tables and update it periodically. Hence, whenever a source node sends the request message to the MC, the MC calculates the node’s distance to its neighboring nodes based on the current position of the vehicle. If the distance is less than 500 m and both nodes have common free channels in the DSRC band, the MC selects this node as the first relay. It then repeats this process for the second relay and does so until it reaches the destination. For each link, based on the current position of the two communicating nodes and the range in which these nodes lie, these nodes only make a stable link for that specific band. In this way, a path between the source and destination can be the combination of three different wireless technologies.
- Case ii: (when the source vehicle is within the DSRC range but no free common channels are available) If there is no common channel available in the DSRC band in the previous case, which is highly possible in any vehicular environment, the vehicle checks the other bands. As mentioned above, the channel state remains the same for a specific coverage range. Since 500 m covers both mmWave and THz ranges, there is a possibility that the querying vehicle may find common free channels in another band, but it can select a relay only within the coverage range of the respective band. In order to forward the packet without delay, if the source and relay nodes are 100 m or 10 m apart from each other, and both have the same free channel for either distance, they will form a link. If a source node discovers that both mmWave and THz bands are available, it will choose to use the mmWave band to send the packet to the furthest distance. To elaborate on this, refer to Figure 2, where the following list could be possible for a to link. = and = .
- Case iii: (when the source vehicle is within mmWave range) In this case, we consider all the relay nodes to be within the mmWave range only. After calculating , which includes free channels in the mmWave range, the MC repeats the process until it reaches the destination, and finally sends the heterogeneous stable path to the source vehicle. From our example scenario in Figure 2, and can make a possible connection for this case if both have the following lists available: = and = .
- Case iv: (when the source vehicle is within mmWave range but no common channel is available) If no common channel is available for source and relay nodes in the mmWave range, the source vehicle checks the THz band. Since the THz range covers 10 m, there is a possibility that the querying vehicle has common free channels in this band. To ensure delivery, if the source and relay nodes are 10 m away from each other, and both have the same free channel in the THz band, they form a link. As discussed in , the same link from to for THz communication is used to deliver the packet in this scenario.
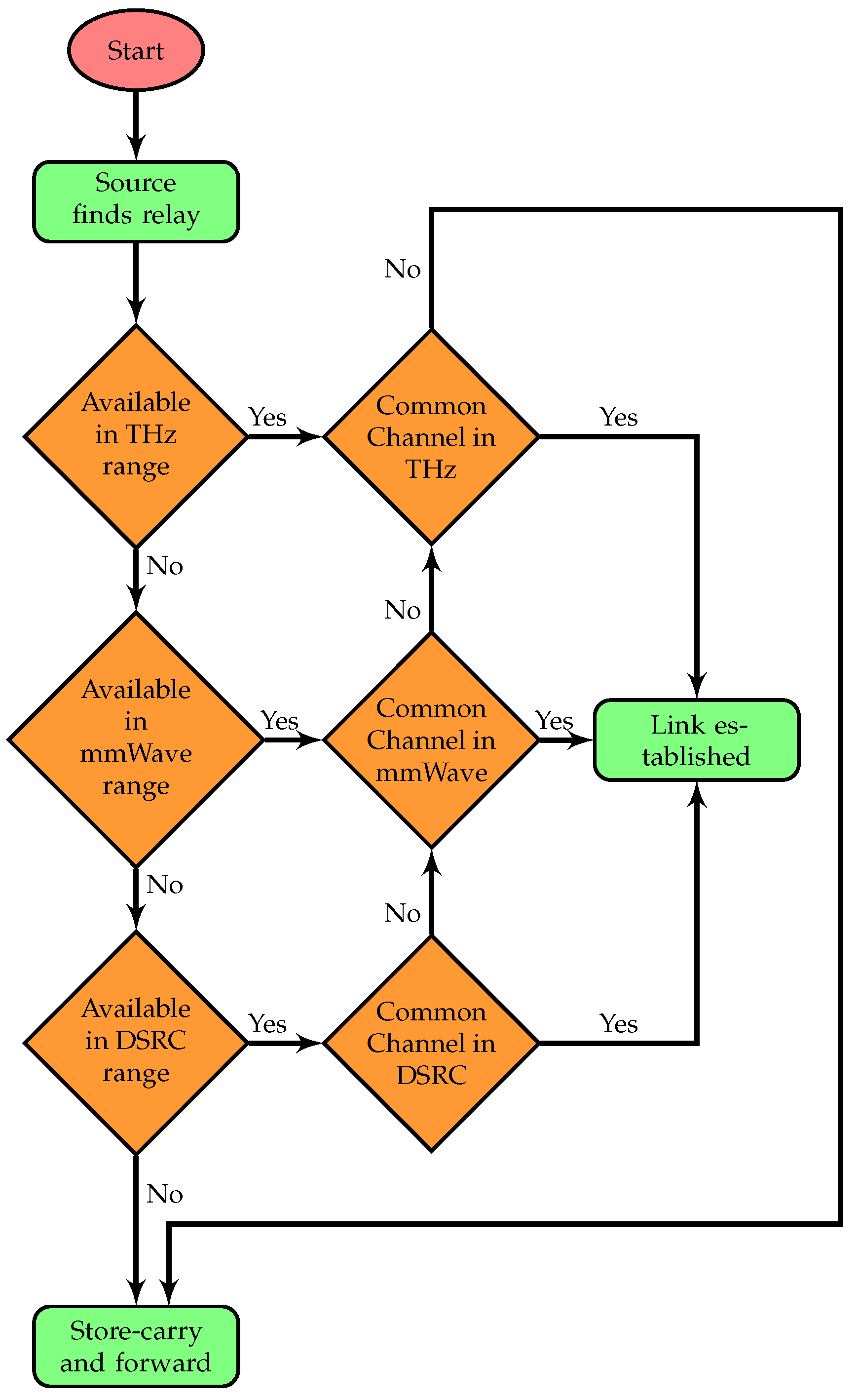
- Case v: (when the source vehicle is within the THz range) In this case, there are two possibilities: (i) when the relay node is only 10 m away from the source vehicle and all neighboring vehicles are within this range, it means the vehicle must be at an intersection; at an intersection, the source must be within range of an RSU, so the querying vehicle repeats the previous four cases (to find ) to make a stable connection between itself and the RSU; and (ii) when a source node does not have a node within 500 m, except for the one that is just 10 m away from the source. This relay might have another node that is 510 m from the source. In all cases, if the source vehicle fails to find a free common channel or a relay node, the vehicle then holds the packet under the store–carry–forward scheme until it finds a free channel or a relay node. A delay might occur by using this approach, but the delay is more acceptable than dropping the packet. To summarize, using three different wireless technologies, the scheme allows a packet to be forwarded to the farthest node if the channel for that technology is available. Otherwise, if the spectrum is not found in one band, there is a good chance that vehicles can still establish a stable link by using one of the other available bands within the coverage range. The flow chart summarizing the whole algorithm is shown in Figure 3.
4. Simulation Results
4.1. Simulation Environment
- (i)
- Packet delivery ratio (PDR): This is the ratio of packets successfully received by the destination to the total number of packets sent from the source. If denotes the number of packets sent and represents the number of successfully received packets, then PDR is calculated as follows:
- (ii)
- End-to-end delay: This is the total time required by a packet to travel from the source to destination, calculated as follows:
- (iii)
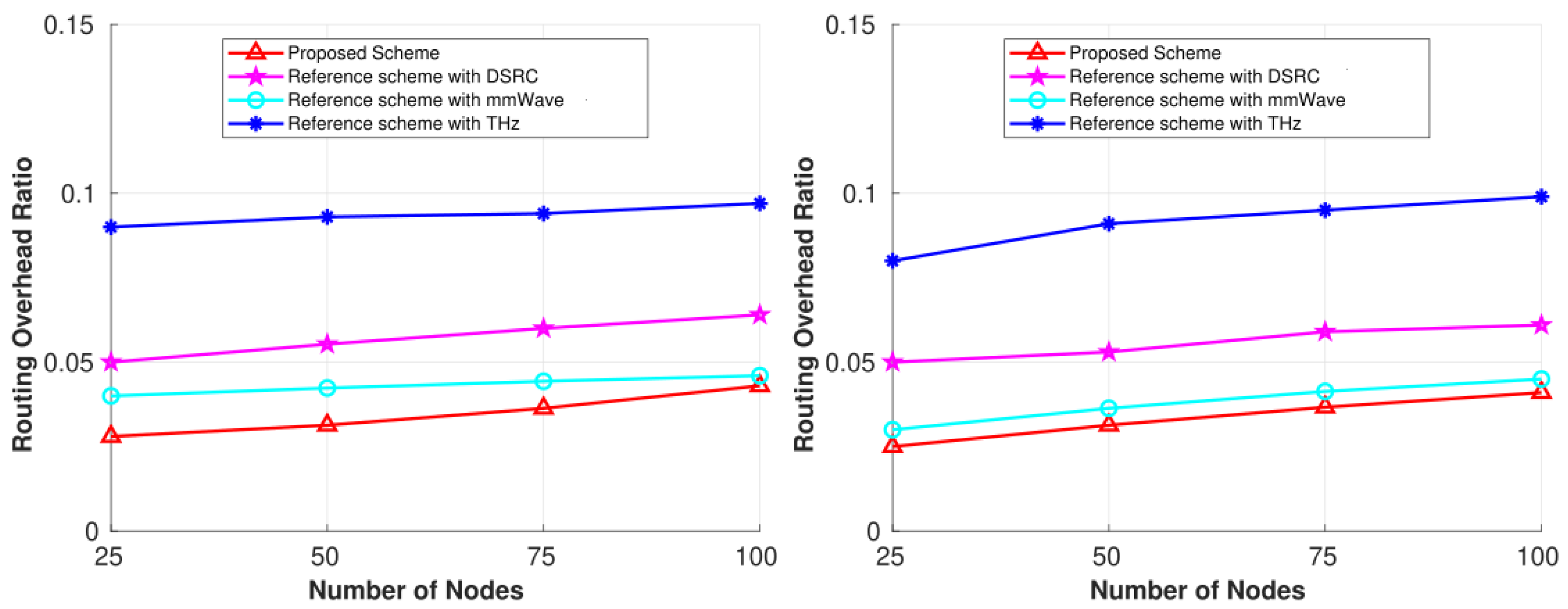
- Routing overhead ratio (ROR): This is the ratio of the number of control packets to the total number of packets in the network. If denotes the number of control packets sent, and denotes the total number of packets, the overhead is calculated as follows:
4.2. Results Analysis
4.2.1. Packet Delivery Ratio
4.2.2. End-to-End Delay
4.2.3. Routing Overhead Ratio
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DSRC | dedicated short-range communication |
| mmWave | millimeter wave |
| THz | terahertz |
| 6G | sixth generation |
| SDN | software-defined networking |
| CR-SDVN | cognitive radio–software-defined vehicular network |
| MC | main controller |
| VANET | vehicular ad hoc network |
| ITS | intelligent transportation system |
| V2V | vehicle-to-vehicle |
| V2I | vehicle-to-infrastructure |
| V2P | vehicle-to-pedestrian |
| V2D | vehicle-to-drone |
| V2S | vehicle-to-ship |
| V2X | vehicle-to-everything |
| AI | artificial intelligence |
| NFV | network function virtualization |
| FCC | Federal Communications Commission |
| RSU | roadside unit |
| LOS | line of sight |
| NS-2 | network simulator-2 |
| PDR | packet delivery ratio |
| ROR | routing overhead ratio |
References
- Adnan Yusuf, S.; Khan, A.; Souissi, R. Vehicle-to-everything (V2X) in the autonomous vehicles domain—A technical review of communication, sensor, and AI technologies for road user safety. Transp. Res. Interdiscip. Perspect. 2024, 23, 100980. [Google Scholar] [CrossRef]
- Asif, F.; Ghafoor, H.; Koo, I. Secure Cognitive Radio Vehicular Ad Hoc Networks Using Blockchain Technology in Smart Cities. Appl. Sci. 2024, 14, 8146. [Google Scholar] [CrossRef]
- Jyostna, K.; Satwik, N.; Anvesh, S.S.; Reddy, G.S.A.; Raj, M.B. A Comprehensive Survey on Spectrum Sensing Techniques for the Implementation of Cognitive Vehicular Networks. In Proceedings of the 2022 International Conference on Recent Trends in Microelectronics, Automation, Computing and Communications Systems (ICMACC), Hyderabad, India, 28–30 December 2022; pp. 353–359. [Google Scholar] [CrossRef]
- Hossain, M.A.; Md Noor, R.; Azzuhri, S.R.; Z’aba, M.R.; Ahmedy, I.; Yau, K.L.A.; Chembe, C. Spectrum sensing challenges & their solutions in cognitive radio based vehicular networks. Int. J. Commun. Syst. 2021, 34, e4748. [Google Scholar] [CrossRef]
- Abbas, F.; Hariz, H.M.; Siva Shankar, S.; Hameed, R.R.; Alshukur, Z.M.; Hashim, M.I. Effective Spectrum Allocation with Priority Function and Multipoint Relay-Based Routing in VANETs. In Proceedings of the 2024 Asian Conference on Communication and Networks (ASIANComNet), Bangkok, Thailand, 24–27 October 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Song, Z.; Gao, Y.; Tafazolli, R. A survey on spectrum sensing and learning technologies for 6G. IEICE Trans. Commun. 2021, 104, 1207–1216. [Google Scholar] [CrossRef]
- Idris, M.Y.I.; Ahmedy, I.; Soon, T.K.; Yahuza, M.; Tambuwal, A.B.; Ali, U. Cognitive radio and machine learning modalities for enhancing the smart transportation system: A systematic literature review. ICT Express 2024, 10, 693–734. [Google Scholar] [CrossRef]
- Yu, H.; Zikria, Y.B. Cognitive radio networks for internet of things and wireless sensor networks. Sensors 2020, 20, 5288. [Google Scholar] [CrossRef]
- Xing, Y.; Rappaport, T.S. Millimeter Wave and Terahertz Urban Microcell Propagation Measurements and Models. IEEE Commun. Lett. 2021, 25, 3755–3759. [Google Scholar] [CrossRef]
- Aslam, M.M.; Du, L.; Zhang, X.; Chen, Y.; Ahmed, Z.; Qureshi, B. Sixth generation (6G) cognitive radio network (CRN) application, requirements, security issues, and key challenges. Wirel. Commun. Mob. Comput. 2021, 2021, 1331428. [Google Scholar] [CrossRef]
- Chang, B.; Tang, W.; Yan, X.; Tong, X.; Chen, Z. Integrated Scheduling of Sensing, Communication, and Control for mmWave/THz Communications in Cellular Connected UAV Networks. IEEE J. Sel. Areas Commun. 2022, 40, 2103–2113. [Google Scholar] [CrossRef]
- Rasheed, I.; Hu, F.; Hong, Y.K.; Balasubramanian, B. Intelligent Vehicle Network Routing with Adaptive 3D Beam Alignment for mmWave 5G-Based V2X Communications. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2706–2718. [Google Scholar] [CrossRef]
- Hussein, N.H.; Yaw, C.T.; Koh, S.P.; Tiong, S.K.; Chong, K.H. A Comprehensive Survey on Vehicular Networking: Communications, Applications, Challenges, and Upcoming Research Directions. IEEE Access 2022, 10, 86127–86180. [Google Scholar] [CrossRef]
- Khan, Z.; Khan, S.M.; Chowdhury, M.; Rahman, M.; Islam, M. Performance Evaluation of 5G Millimeter-Wave-Based Vehicular Communication for Connected Vehicles. IEEE Access 2022, 10, 31031–31042. [Google Scholar] [CrossRef]
- Jamuar, A.; Aparanji, V.M. Simulation of Terahertz Communication in Vehicular Network. In Proceedings of the 2023 International Conference on Smart Systems for applications in Electrical Sciences (ICSSES), Tumakuru, India, 7–8 July 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, X.; Umehira, M.; Akimoto, M.; Han, B.; Zhou, H. Green spectrum sharing framework in B5G era by exploiting crowdsensing. IEEE Trans. Green Commun. Netw. 2022, 7, 916–927. [Google Scholar] [CrossRef]
- Bahbahani, M.S.; Alsusa, E.; Hammadi, A. A Directional TDMA Protocol for High Throughput URLLC in mmWave Vehicular Networks. IEEE Trans. Veh. Technol. 2022, 72, 3584–3599. [Google Scholar] [CrossRef]
- Yi, H.; Guan, K.; He, D.; Ai, B.; Dou, J.; Kim, J. Characterization for the vehicle-to-infrastructure channel in urban and highway scenarios at the terahertz band. IEEE Access 2019, 7, 166984–166996. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Y.; Miao, Q. A cluster-based broadcast scheduling scheme for mmWave vehicular communication. IEEE Commun. Lett. 2019, 23, 1202–1206. [Google Scholar] [CrossRef]
- Mendler, G.; Heijenk, G. On the potential of multicast in millimeter wave vehicular communications. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Doeker, T.; Eckhardt, J.M.; Kürner, T. Channel Measurements and Modeling for Low Terahertz Communications in an Aircraft Cabin. IEEE Trans. Antennas Propag. 2022, 70, 10903–10916. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Khyam, M.O.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Poor, H.V. 6G for vehicle-to-everything (V2X) communications: Enabling technologies, challenges, and opportunities. Proc. IEEE 2022, 110, 712–734. [Google Scholar] [CrossRef]
- Huang, C.J.; Hu, K.W.; Cheng, H.W. An Adaptive Bandwidth Management Algorithm for Next-Generation Vehicular Networks. Sensors 2023, 23, 7767. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, W.; Dong, P.; Du, X.; Qiao, W.; Guizani, M. Improve the reliability of 6G vehicular communication through skip network coding. Veh. Commun. 2022, 33, 100400. [Google Scholar] [CrossRef]
- Tolani, M.; Asad Ali Biabani, S.; Kumar, P. Energy-Efficient Deviation Aware Adaptive Bit-Mapping Medium Access Control Protocol for Wireless Sensor Network. IEEE Access 2024, 12, 94424–94435. [Google Scholar] [CrossRef]
- Lin, C.H.; Lin, S.C.; Blasch, E. Tulvcan: Terahertz ultra-broadband learning vehicular channel-aware networking. In Proceedings of the IEEE INFOCOM 2021-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Vancouver, BC, Canada, 10–13 May 2021; pp. 1–6. [Google Scholar]
- Mahbub, M.; Shubair, R.M. Contemporary advances in multi-access edge computing: A survey of fundamentals, architecture, technologies, deployment cases, security, challenges, and directions. J. Netw. Comput. Appl. 2023, 219, 103726. [Google Scholar] [CrossRef]
- Rasheed, I.; Hu, F. Intelligent super-fast Vehicle-to-Everything 5G communications with predictive switching between mmWave and THz links. Veh. Commun. 2021, 27, 100303. [Google Scholar] [CrossRef]
- Nakayima, O.; Soliman, M.I.; Ueda, K.; Mohamed, S.A.E. Combining Software-Defined and Delay-Tolerant Networking Concepts With Deep Reinforcement Learning Technology to Enhance Vehicular Networks. IEEE Open J. Veh. Technol. 2024, 5, 721–736. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Consider City Environment? | Consider the Spectrum Scarcity Issue? | Consider Stable Routing Paths? | Consider SDN? | Consider Consider Different Wireless Technologies? | |||
|---|---|---|---|---|---|---|---|---|
| DSRC | mmWave | THz | Integration of Three | |||||
| [17] | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ |
| [18] | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ |
| [19] | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ |
| [20] | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [21] | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ |
| [22] | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ |
| [23] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ |
| [24] | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ |
| [25] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ |
| [26] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ |
| [27] | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ |
| [28] | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | ✓ | ✗ |
| [29] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ |
| Vehicle ID | Vehicle Position | Vehicle Speed (m/s) | |||
|---|---|---|---|---|---|
| 25 | |||||
| 20 | |||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 30 | |||||
| Parameters | Values | |
|---|---|---|
| Area | 1500 m × 3000 m | |
| Velocity | 10–25 m/s | |
| Packet Size | 64 bytes | |
| Number of RSUs | 3 | |
| Simulation Time | 100 s and 150 s | |
| Number of vehicles | 25, 50, 75, 100 | |
| DSRC | Coverage Range | 500 m |
| Freq Range | 5850–5925 MHz | |
| Bandwidth | 10 MHz | |
| Antenna Gain | 10 dBi | |
| Tx power | 27 dBm | |
| mmWave | Coverage Range | 100 m |
| Freq Range | 30–60 GHz | |
| Bandwidth | 30 GHz | |
| Antenna Gain | 17 dBi | |
| Tx power | 20 dBm | |
| THz | Coverage Range | 10 m |
| Freq Range | 0.3–3 THz | |
| Bandwidth | 0.1 THz | |
| Antenna Gain | 24 dBi | |
| Tx power | 10 dBm |
| Spectrum Band | Drawbacks |
|---|---|
| DSRC | The PDR value is low, with a high end-to-end delay and overhead ratio. This shows a scarcity of the dedicated spectrum for vehicular communications. |
| mmWave | All three parameters show quite good performance in comparison to both DSRC and THz bands. This is due to a good number of unused bands and a good coverage area. |
| THz | All parameters show poor results because of the low coverage range. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Riaz, U.; Rafid, M.; Ghafoor, H.; Koo, I. Integration of DSRC, mmWave, and THz Bands in a 6G CR-SDVN. Sensors 2025, 25, 1580. https://doi.org/10.3390/s25051580
Riaz U, Rafid M, Ghafoor H, Koo I. Integration of DSRC, mmWave, and THz Bands in a 6G CR-SDVN. Sensors. 2025; 25(5):1580. https://doi.org/10.3390/s25051580
Chicago/Turabian StyleRiaz, Umair, Muhammad Rafid, Huma Ghafoor, and Insoo Koo. 2025. "Integration of DSRC, mmWave, and THz Bands in a 6G CR-SDVN" Sensors 25, no. 5: 1580. https://doi.org/10.3390/s25051580
APA StyleRiaz, U., Rafid, M., Ghafoor, H., & Koo, I. (2025). Integration of DSRC, mmWave, and THz Bands in a 6G CR-SDVN. Sensors, 25(5), 1580. https://doi.org/10.3390/s25051580