
Optimal Algorithms for Improving Pressure-Sensitive Mat Centre of Pressure Measurements


Abstract
1. Introduction
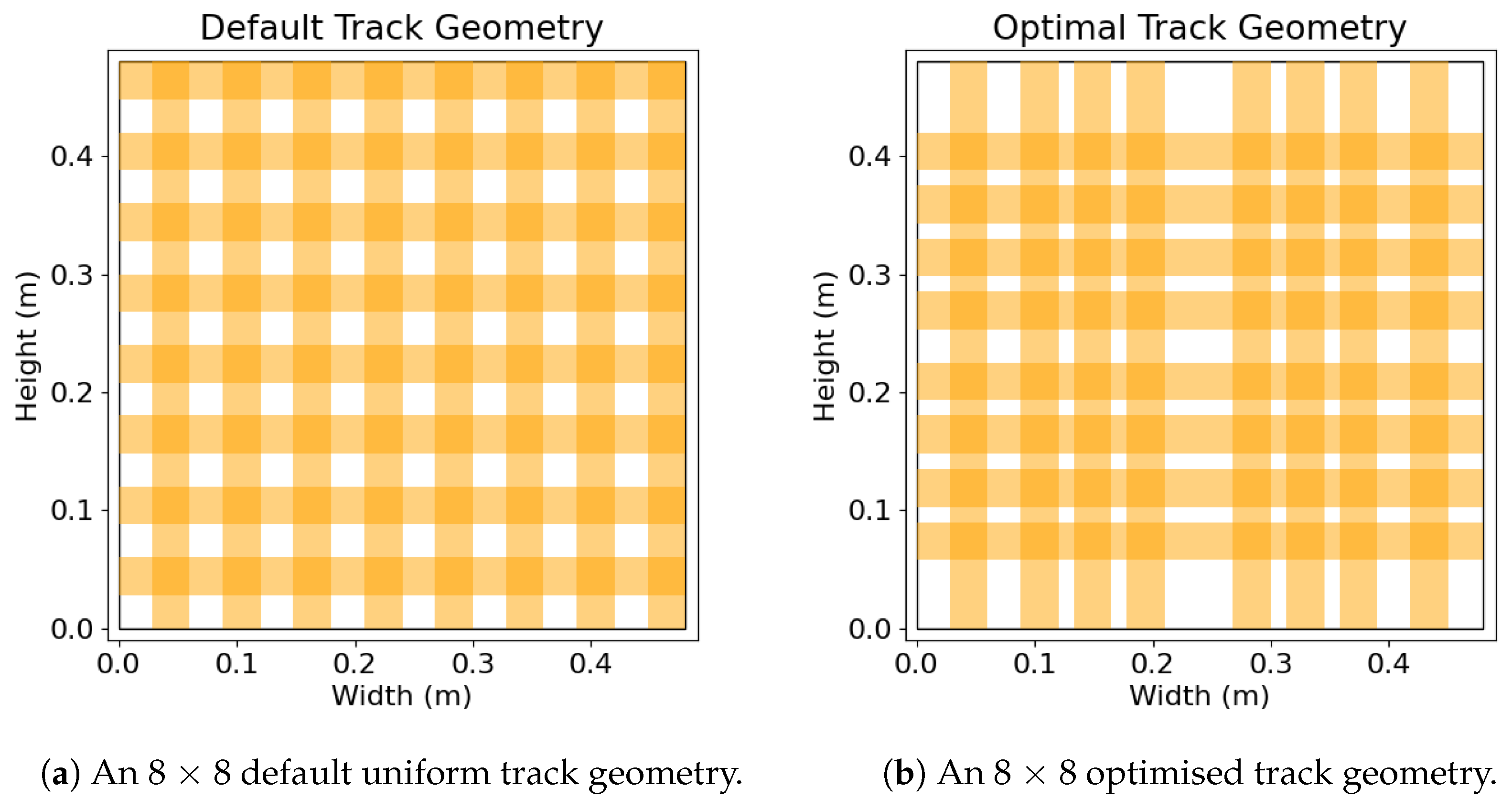
- Using a non-uniform sensor layout: In the researched designs of [27,28], as well as all commercial systems, the sensor layouts are uniform; the sensors were the same size and had equal spacing between them. A uniform layout is not necessary, as most areas of the mat are unused during balance activities. Therefore, moving sensors from little-used areas to areas where they are highly used can increase CoP accuracy. This can be carried out in an optimal fashion using experimental data.
- Fitting high-resolution profiles to low-resolution data: By using knowledge of footprint shape or footprint pressure profile (e.g., by previously measuring a high-resolution profile), the CoP accuracy obtained from a low-resolution PSM can be enhanced by fitting the higher quality data to the low-resolution data and then using the higher quality data to compute the CoP.
- Smooth human movement: Because human motion is typically smooth and predictable (or can be predicted based on the task), models of human movement such as minimal jerk or minimal acceleration can also be embedded to remove the effects of noise and disturbance, further increasing CoP accuracy [35,36].
- The first mathematical model that fully describes the general form of a low-cost piezoresistive PSM.
- The development of three new optimisation algorithms to improve the design and accuracy of low-cost piezoresistive PSMs.
- When using our mathematical model and simulation scenarios, the average CoP error from an 8 × 8, 48 cm by 48 cm uniform mat layout is 17.37%.
- When using our optimal layout, the average CoP error became 5.47% for the same size and resolution mat.
- The measured footprint optimisation process has an average CoP error of 3.93% when performed with the simulation scenarios on the standard 8 × 8, 48 cm by 48 cm uniform layout.
- With our model and results, we now have new ways to produce better-performing, low-cost PSMs for applications ranging from rehabilitation assessments to in-home use.
2. Modelling a Pressure-Sensitive Mat
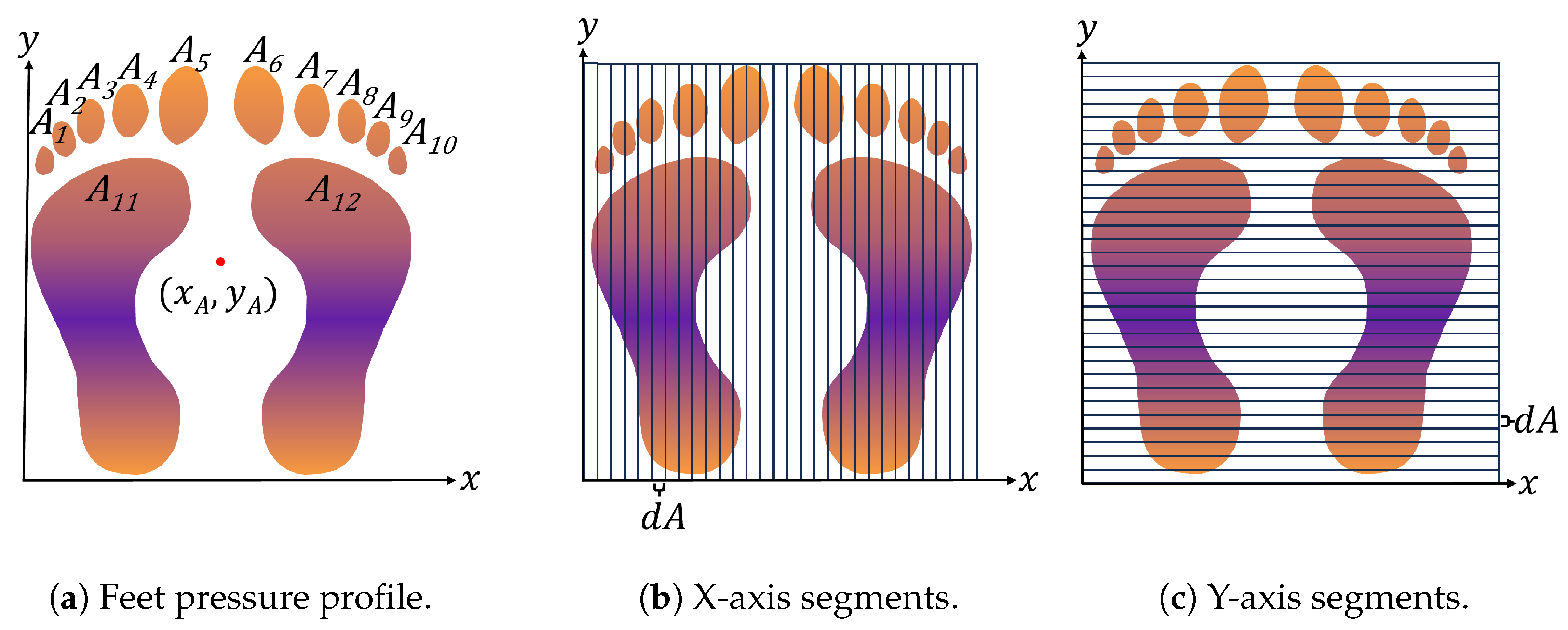
2.1. Centre of Pressure
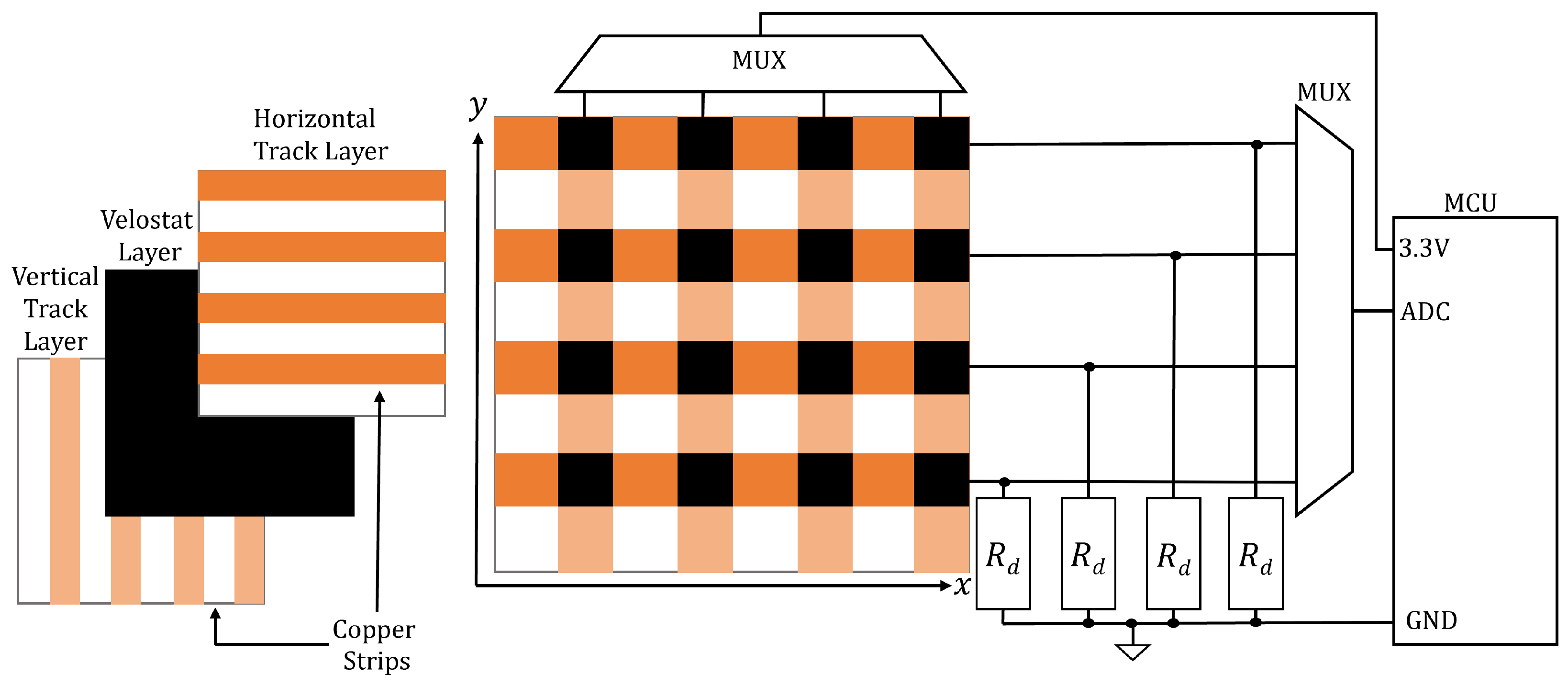
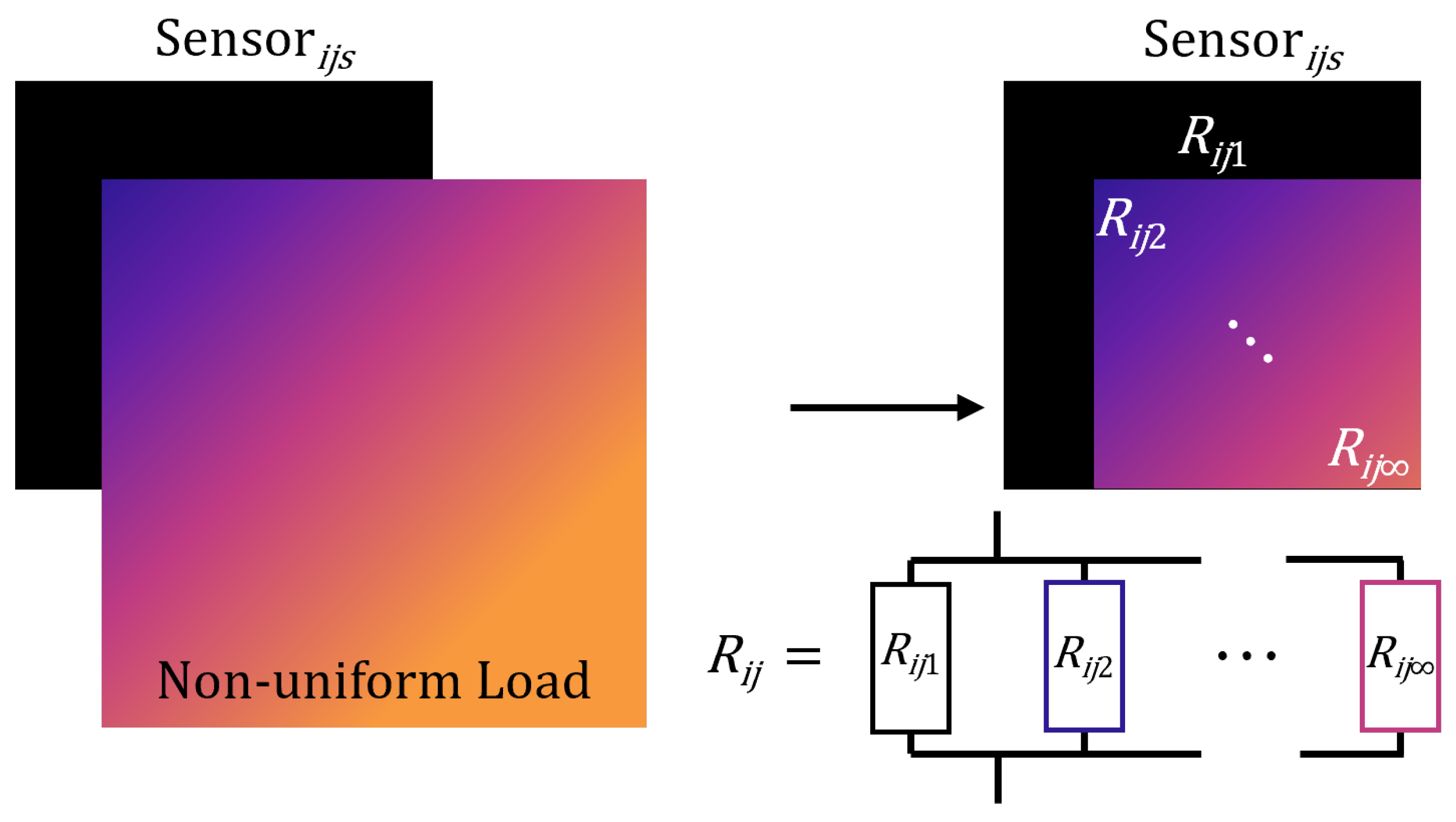
2.2. Pressure Measurement Using a PSM
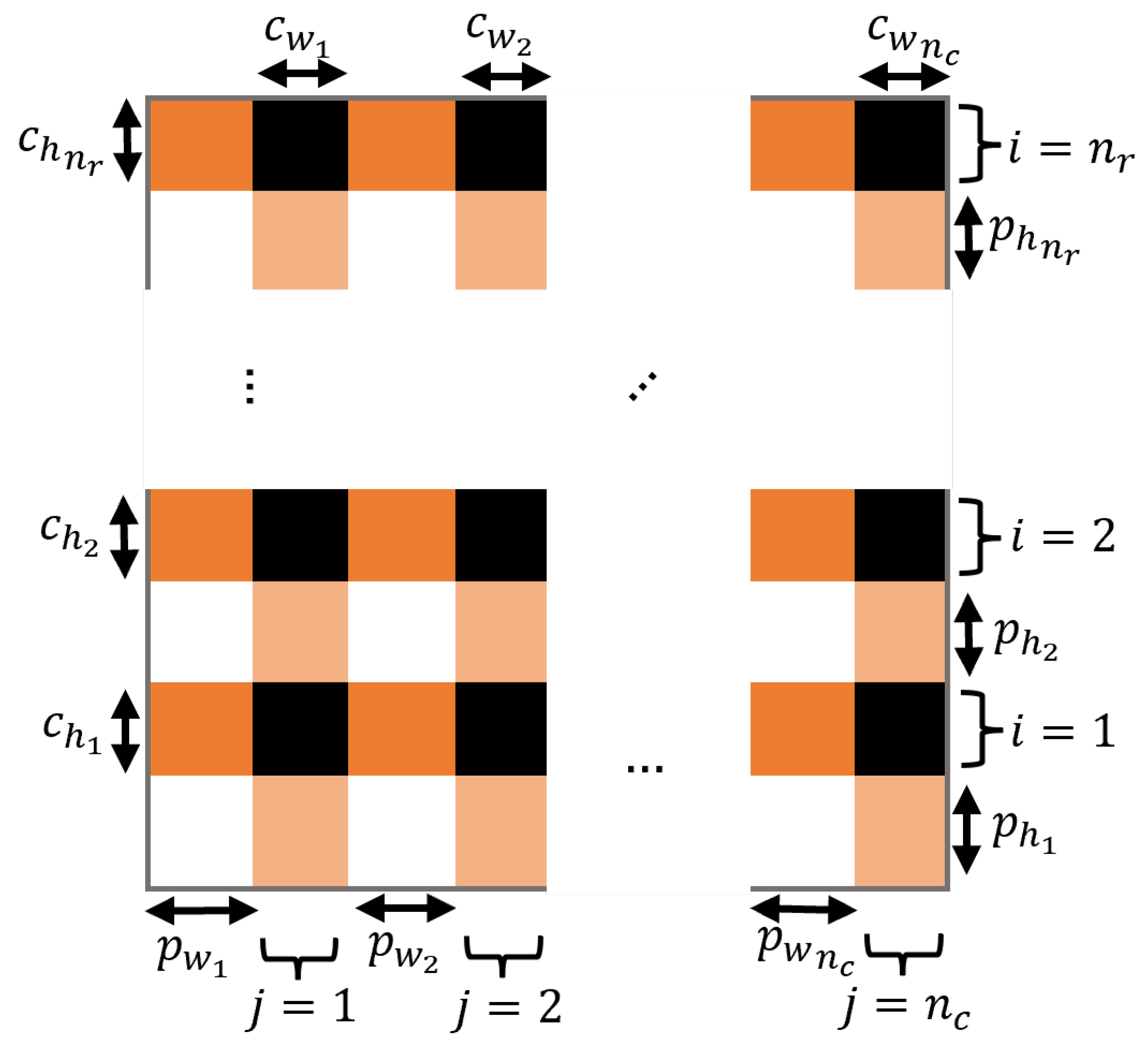
2.3. PSM Model
2.4. CoP Approximation Using a PSM
3. Optimisation of PSM Geometry and CoP Estimation
3.1. Optimal PSM Geometry
Efficient Solution Form
3.2. CoP Estimation Using Measured Footprint
3.3. CoP Estimation Using Human Movement Models
4. Application Scenarios
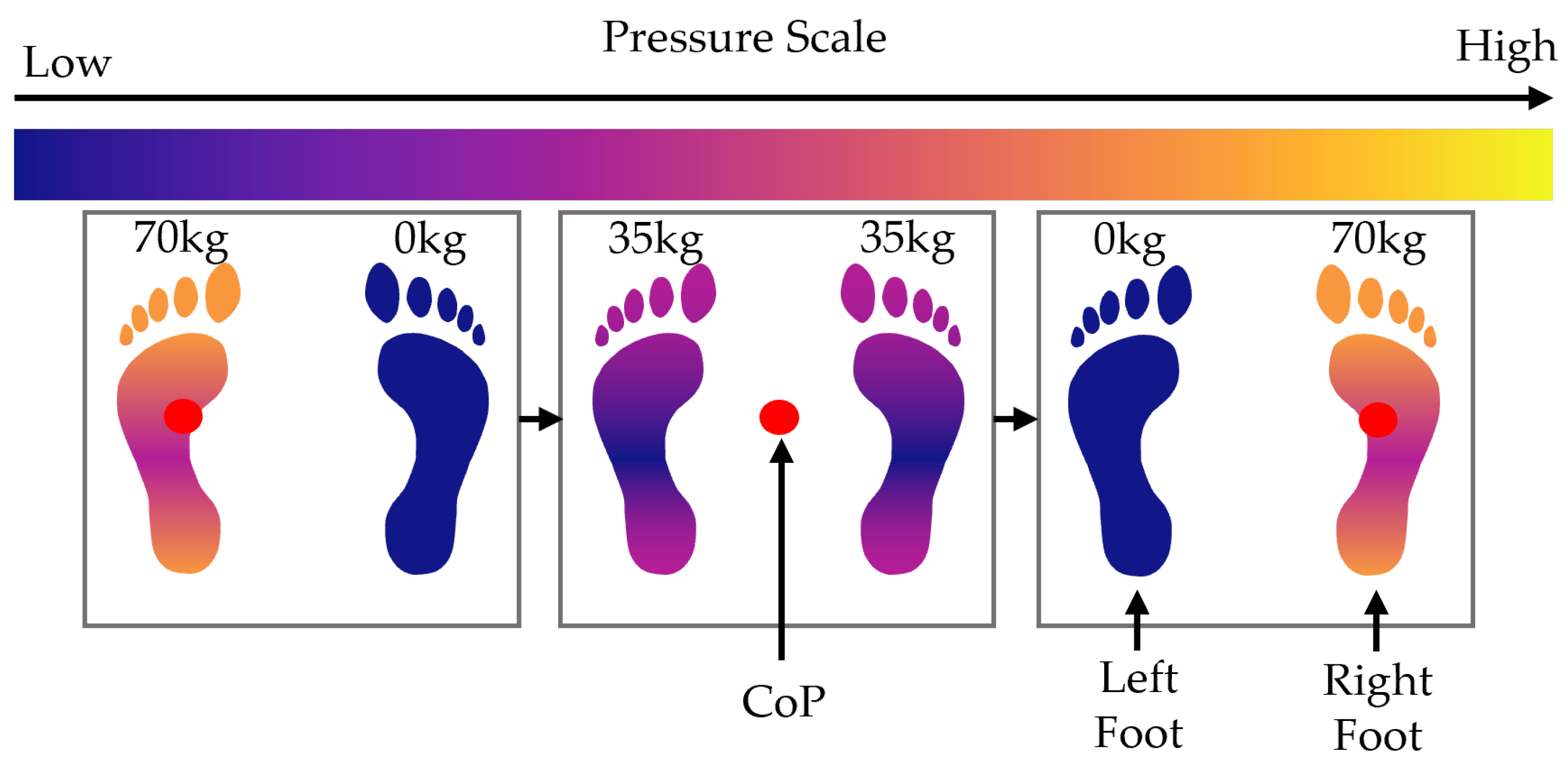
4.1. Side Weight Shift
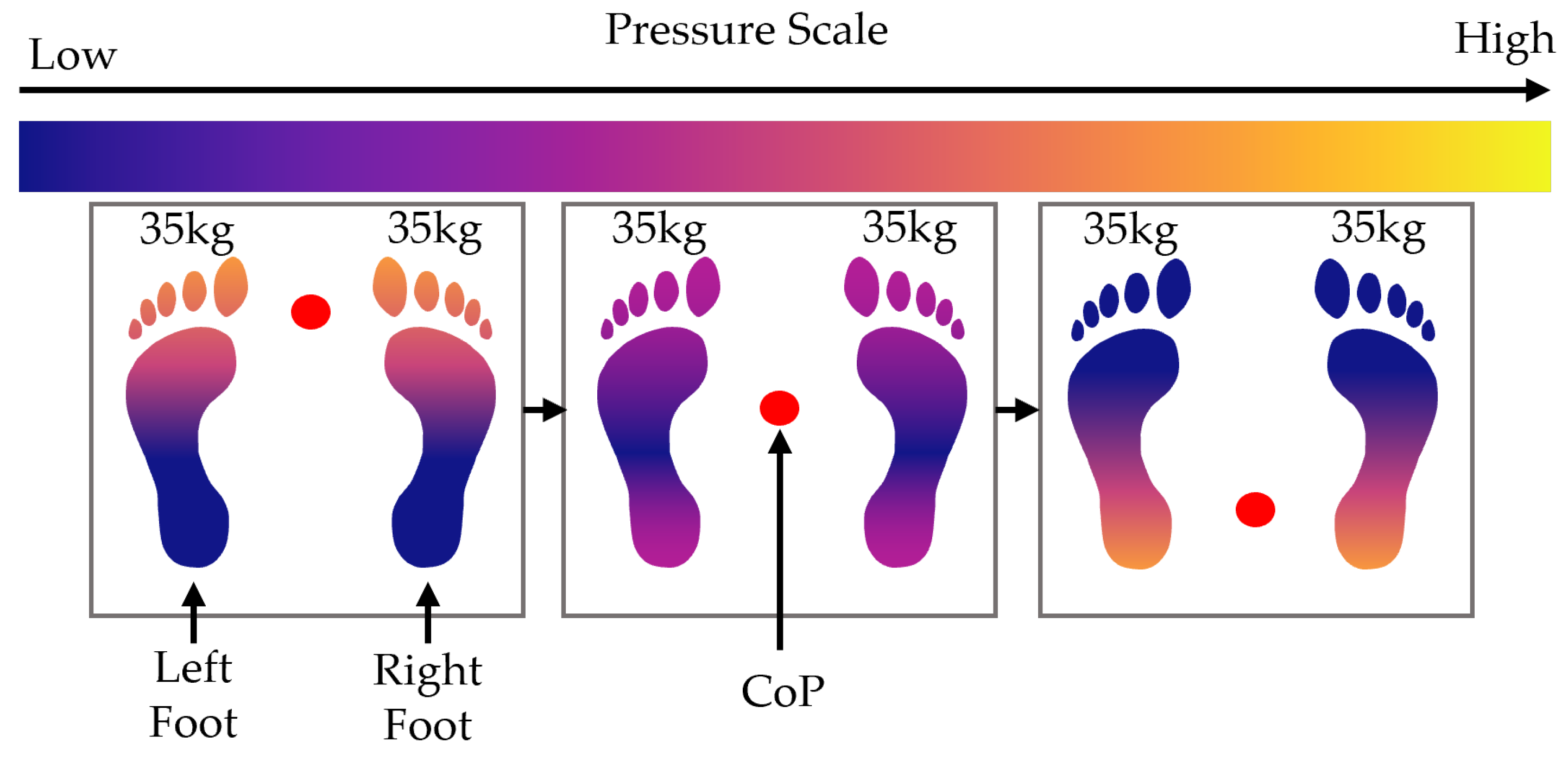
4.2. Front Weight Shift
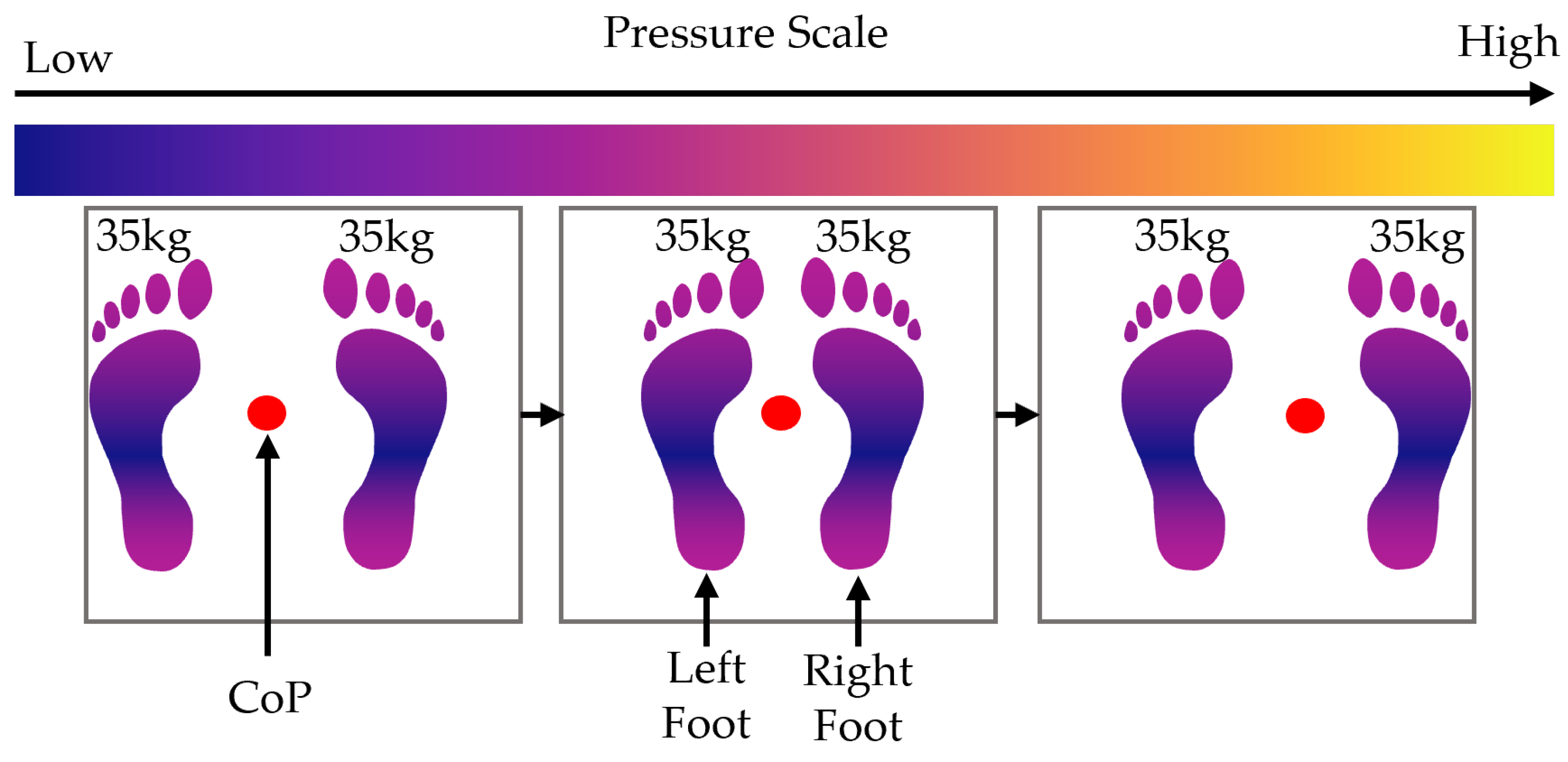
4.3. Foot Slides
5. Methods
5.1. Implementation Details
5.2. Optimal PSM Geometry Algorithm
| Algorithm 1 Optimal PSM geometry |
| Input: Parameter search space |
Output: Optimal parameter vector
|
5.3. CoP Estimation Using Measured Footprint Algorithm
| Algorithm 2 Measured Footprint Optimisation |
| Input: Experimental pressure values provided by the PSM at time t |
| Input: Set of measured footprints |
| Input: PSM geometry parameters |
Output: CoP estimate at time t
|
6. Results
7. Discussion
8. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSM | Pressure-Sensitive Mat |
| CoP | Centre of Pressure |
| MCU | Microcontroller |
| ADC | Analogue-digital converter |
| GPIO | General-purpose input/output |
| IMU | Inertial measurement unit |
| AI | Artificial Intelligence |
Appendix A. List of Variables
- t: Time (s).
- m: Mass of a load (kg).
- : Co-ordinates on the surface (m).
- : Actual co-ordinates of the CoP (m).
- : Estimated co-ordinates of the CoP (m).
- : Percentage error between the actual and estimated CoP (%).
- : Sensor midpoint co-ordinates at index j and i (.
- : Number of rows (unitless).
- : Number of columns (unitless).
- : Pitch heights for the rows, at index k (.
- : Pitch widths for the columns, at index k (.
- : Conductor track heights for the rows, at index k (.
- : Conductor track widths for the columns, at index k (.
- : A continuous pressure profile (Pa).
- : A set of pressure profiles or a pressure profile that varies with time (.
- : Applied pressure of a segment s on a sensor positioned at (Pa).
- : Total applied pressure of a sensor positioned at (Pa).
- : A set of approximations of (.
- : Surface area of a segment s of a sensor positioned at ().
- : Total surface area of a pressure sensor positioned at ().
- : Resistance of a segment s on a sensor positioned at ().
- : Total resistance of a sensor positioned at ().
- : The resistance of the potential divider resistor ().
- : Initial resistance of a 1m by 1m unloaded sensor ().
- : Slope of the pressure-resistance curve (unitless).
- b: number of bits of the MCU’s ADC (bit).
- : Input voltage to the sensors (V).
- : Voltage of a sensor at position (V).
- : Quantised (V).
- T: Total time of a pressure profile or an appended set of profiles (s).
- : A vector of pitch widths and heights, and conductor track widths and heights (m).
- : The error 2-norm used to optimise the PSM for minimal CoP error (unitless).
- : Number of footprints within a set of known footprints (unitless).
- : A set of known, previously measured footprints (.
- : Position of known footprint k (m).
- : Amplitude of the load applied to a footprint k (unitless).
- : Total mass of the user (kg).
- g: Gravitational acceleration constant ().
- : Width of foot (m).
- : Height of foot (m).
- : Width of mat (m).
- : Height of mat (m).
- : Total pressure at sensor on the default left foot pressure profile, where (Pa).
- : Total pressure at sensor on the default right foot pressure profile, where (Pa).
- : Total pressure at sensor on the default pressure profile . (Pa).
- : Left foot starting position x co-ordinate (m).
- : Left foot ending position x co-ordinate (m).
- : Right foot starting position x co-ordinate (m).
- : Right foot ending position x co-ordinate (m).
References
- Kwon, I.H.; Shin, W.S.; Choi, K.S.; Lee, M.S. Effects of Real-Time Feedback Methods on Static Balance Training in Stroke Patients: A Randomized Controlled Trial. Healthcare 2024, 12, 767. [Google Scholar] [CrossRef] [PubMed]
- Eftekhar-Sadat, B.; Azizi, R.; Aliasgharzadeh, A.; Toopchizadeh, V.; Ghojazadeh, M. Effect of balance training with Biodex Stability System on balance in diabetic neuropathy. Ther. Adv. Endocrinol. Metab. 2015, 6, 233–240. [Google Scholar] [CrossRef] [PubMed]
- Hyun, S.J.; Lee, J.; Lee, B.H. The Effects of Sit-to-Stand Training Combined with Real-Time Visual Feedback on Strength, Balance, Gait Ability, and Quality of Life in Patients with Stroke: A Randomized Controlled Trial. Int. J. Environ. Res. Public Health 2021, 18, 12229. [Google Scholar] [CrossRef]
- Ayed, I.; Jaume-i Capó, A.; Martínez-Bueso, P.; Mir, A.; Moyà-Alcover, G. Balance Measurement Using Microsoft Kinect v2: Towards Remote Evaluation of Patient with the Functional Reach Test. Appl. Sci. 2021, 11, 6073. [Google Scholar] [CrossRef]
- Quijoux, F.; Vienne-Jumeau, A.; Bertin-Hugault, F.; Zawieja, P.; Lefèvre, M.; Vidal, P.P.; Ricard, D. Center of pressure displacement characteristics differentiate fall risk in older people: A systematic review with meta-analysis. Ageing Res. Rev. 2020, 62, 101117. [Google Scholar] [CrossRef]
- Onuma, R.; Masuda, T.; Hoshi, F.; Matsuda, T.; Sakai, T.; Okawa, A.; Jinno, T. Measurements of the centre of pressure of individual legs reveal new characteristics of reduced anticipatory postural adjustments during gait initiation in patients with post-stroke hemiplegia. J. Rehabil. Med. 2020, 53, 101117. [Google Scholar] [CrossRef]
- Celik, H.I.; Yildiz, A.; Yildiz, R.; Mutlu, A.; Soylu, R.; Gucuyener, K.; Duyan-Camurdan, A.; Koc, E.; Onal, E.E.; Elbasan, B. Using the center of pressure movement analysis in evaluating spontaneous movements in infants: A comparative study with general movements assessment. Ital. J. Pediatr. 2023, 49, 165. [Google Scholar] [CrossRef]
- Weizman, Y.; Tan, A.M.; Fuss, F.K. Benchmarking study of the forces and centre of pressure derived from a novel smart-insole against an existing pressure measuring insole and force plate. Measurement 2019, 142, 48–59. [Google Scholar] [CrossRef]
- Daroudi, S.; Arjmand, N.; Mohseni, M.; El-Rich, M.; Parnianpour, M. Evaluation of ground reaction forces and centers of pressure predicted by AnyBody Modeling System during load reaching/handling activities and effects of the prediction errors on model-estimated spinal loads. J. Biomech. 2024, 164, 111974. [Google Scholar] [CrossRef] [PubMed]
- Dawson, N.; Dzurino, D.; Karleskint, M.; Tucker, J. Examining the reliability, correlation, and validity of commonly used assessment tools to measure balance. Health Sci. Rep. 2018, 1, e98. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, G.S.; Menuchi, M.R.P.; Ambrósio, P.E. Center of Mass Estimation Using Kinect and Postural Sway. In Proceedings of the XXVII Brazilian Congress on Biomedical Engineering, Vitória, Brazil, 26–30 October 2020; Bastos-Filho, T.F., de Oliveira Caldeira, E.M., Frizera-Neto, A., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 1707–1711. [Google Scholar] [CrossRef]
- Chung, J.; Kim, S.; Yang, Y. Correlation between accelerometry and clinical balance testing in stroke. J. Phys. Ther. Sci. 2016, 28, 2260–2263. [Google Scholar] [CrossRef] [PubMed]
- Inglis-Jassiem, G.; Titus, A.; Burger, M.; Hartley, T.; Steyn, H.; Berner, K. Measurement of stroke-related balance dysfunction in Africa. In Collaborative Capacity Development to Complement Stroke Rehabilitation in Africa; Louw, Q., Ed.; Human Functioning, Technology and Health; AOSIS: Cape Town, South Africa, 2020. [Google Scholar] [CrossRef]
- Hendrickson, J.; Patterson, K.K.; Inness, E.L.; McIlroy, W.E.; Mansfield, A. Relationship between asymmetry of quiet standing balance control and walking post-stroke. Gait Posture 2014, 39, 177–181. [Google Scholar] [CrossRef] [PubMed]
- Goetschius, J.; Feger, M.A.; Hertel, J.; Hart, J.M. Validating Center-of-Pressure Balance Measurements Using the MatScan® Pressure Mat. J. Sport Rehabil. 2018, 27. [Google Scholar] [CrossRef]
- Vanegas, E.; Salazar, Y.; Igual, R.; Plaza, I. Force-Sensitive Mat for Vertical Jump Measurement to Assess Lower Limb Strength: Validity and Reliability Study. JMIR mHealth uHealth 2021, 9, e27336. [Google Scholar] [CrossRef]
- Li, W.; Sun, C.; Yuan, W.; Gu, W.; Cui, Z.; Chen, W. Smart mat system with pressure sensor array for unobtrusive sleep monitoring. In Proceedings of the 2017 39th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Jeju, Republic of Korea, 11–15 July 2017; pp. 177–180, ISSN 1558-4615. [Google Scholar] [CrossRef]
- Zhou, B.; Suh, S.; Rey, V.F.; Altamirano, C.A.V.; Lukowicz, P. Quali-Mat: Evaluating the Quality of Execution in Body-Weight Exercises with a Pressure Sensitive Sports Mat. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2022, 6, 89. [Google Scholar] [CrossRef]
- Yuan, L.; Wei, Y.; Li, J. Smart Pressure E-Mat for Human Sleeping Posture and Dynamic Activity Recognition. IEEE J. Sel. Areas Sens. 2025, 2, 9–20. [Google Scholar] [CrossRef]
- Gao, L.; Lin, Z. Smart Mat Used for Prevention of Hospital-Acquired Pressure Injuries. arXiv 2022, arXiv:2207.03643. [Google Scholar] [CrossRef]
- Caggiari, S.; Jiang, L.; Filingeri, D.; Worsley, P. Optimization of Spatial and Temporal Configuration of a Pressure Sensing Array to Predict Posture and Mobility in Lying. Sensors 2023, 23, 6872. [Google Scholar] [CrossRef]
- González-Castro, A.; Leirós-Rodríguez, R.; Prada-García, C.; Benítez-Andrades, J.A. The Applications of Artificial Intelligence for Assessing Fall Risk: Systematic Review. J. Med. Internet Res. 2024, 26, e54934. [Google Scholar] [CrossRef] [PubMed]
- Brahms, M.; Heinzel, S.; Rapp, M.; Mückstein, M.; Hortobágyi, T.; Stelzel, C.; Granacher, U. The acute effects of mental fatigue on balance performance in healthy young and older adults—A systematic review and meta-analysis. Acta Psychol. 2022, 225, 103540. [Google Scholar] [CrossRef]
- Chen, S.H.; Chou, L.S. Gait balance control after fatigue: Effects of age and cognitive demand. Gait Posture 2022, 95, 129–134. [Google Scholar] [CrossRef]
- Fung, A.; Lai, E.C.; Lee, B.C. A new smart balance rehabilitation system technology platform: Development and preliminary assessment of the Smarter Balance System for home-based balance rehabilitation for individuals with Parkinson’s disease. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Honolulu, HI, USA, 18–21 July 2018; pp. 1534–1537. [Google Scholar] [CrossRef]
- Kiselev, J.; Haesner, M.; Gövercin, M.; Steinhagen-Thiessen, E. Implementation of a home-based interactive training system for fall prevention: Requirements and challenges. J. Gerontol. Nurs. 2015, 41, 14–19. [Google Scholar] [CrossRef]
- Martinez-Cesteros, J.; Medrano-Sanchez, C.; Plaza-Garcia, I.; Igual-Catalan, R.; Albiol-Pérez, S. A Velostat-Based Pressure-Sensitive Mat for Center-of-Pressure Measurements: A Preliminary Study. Int. J. Environ. Res. Public Health 2021, 18, 5958. [Google Scholar] [CrossRef]
- Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors 2016, 16, 365. [Google Scholar] [CrossRef] [PubMed]
- Fatema, A.; Chauhan, S.; Gupta, M.D.; Hussain, A.M. Investigation of the Long-Term Reliability of a Velostat-Based Flexible Pressure Sensor Array for 210 Days. IEEE Trans. Device Mater. Reliab. 2024, 24, 41–48. [Google Scholar] [CrossRef]
- Dzedzickis, A.; Sutinys, E.; Bucinskas, V.; Samukaite-Bubniene, U.; Jakstys, B.; Ramanavicius, A.; Morkvenaite-Vilkonciene, I. Polyethylene-Carbon Composite (Velostat®) Based Tactile Sensor. Polymers 2020, 12, 2905. [Google Scholar] [CrossRef] [PubMed]
- Medrano-Sánchez, C.; Igual-Catalán, R.; Rodríguez-Ontiveros, V.H.; Plaza-García, I. Circuit Analysis of Matrix-Like Resistor Networks for Eliminating Crosstalk in Pressure Sensitive Mats. IEEE Sens. J. 2019, 19, 8027–8036. [Google Scholar] [CrossRef]
- Martínez-Cesteros, J.; Medrano-Sánchez, C.; Castellanos-Ramos, J.; Sánchez-Durán, J.A.; Plaza-García, I. Creep and Hysteresis Compensation in Pressure-Sensitive Mats for Improving Center-of-Pressure Measurements. IEEE Sens. J. 2023, 23, 29585–29593. [Google Scholar] [CrossRef]
- Fatema, A.; Kuriakose, I.; Gupta, R.; Hussain, A.M. Analysis of Interpolation Techniques for a Flexible Sensor Mat for Plantar Pressure Measurement. In Proceedings of the 2023 IEEE Applied Sensing Conference (APSCON), Bengaluru, India, 23–25 January 2023; pp. 1–3. [Google Scholar] [CrossRef]
- Müller, S.; Seichter, D.; Gross, H.M. Cross-Talk Compensation in Low-Cost Resistive Pressure Matrix Sensors. In Proceedings of the 2019 IEEE International Conference on Mechatronics (ICM), Ilmenau, Germany, 18–20 March 2019; Volume 1, pp. 232–237. [Google Scholar] [CrossRef]
- Flash, T.; Hogan, N. The coordination of arm movements: An experimentally confirmed mathematical model. J. Neurosci. 1985, 5, 1688–1703. [Google Scholar] [CrossRef]
- Alexander, R.M. Simple Models of Human Movement. Appl. Mech. Rev. 1995, 48, 461–470. [Google Scholar] [CrossRef]
- Verkerke, G.J.; Hof, A.L.; Zijlstra, W.; Ament, W.; Rakhorst, G. Determining the centre of pressure during walking and running using an instrumented treadmill. J. Biomech. 2005, 38, 1881–1885. [Google Scholar] [CrossRef]
- Park, S.H. Assessment of Weight Shift Direction in Chronic Stroke Patients. Osong Public Health Res. Perspect. 2018, 9, 118–121. [Google Scholar] [CrossRef] [PubMed]
- Hung, J.W.; Chou, C.X.; Hsieh, Y.W.; Wu, W.C.; Yu, M.Y.; Chen, P.C.; Chang, H.F.; Ding, S.E. Randomized Comparison Trial of Balance Training by Using Exergaming and Conventional Weight-Shift Therapy in Patients With Chronic Stroke. Arch. Phys. Med. Rehabil. 2014, 95, 1629–1637. [Google Scholar] [CrossRef] [PubMed]
- D’Silva, L.J.; Phongsavath, T.; Partington, K.; Pickle, N.T.; Marschner, K.; Zehnbauer, T.P.; Rossi, M.; Skop, K.; Roos, P.E. A gaming app developed for vestibular rehabilitation improves the accuracy of performance and engagement with exercises. Front. Med. 2023, 10, 1269874. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.H. Stochastic Nelder–Mead simplex method—A new globally convergent direct search method for simulation optimization. Eur. J. Oper. Res. 2012, 220, 684–694. [Google Scholar] [CrossRef]
- Suprapto, S.; Setiawan, A.; Zakaria, H.; Adiprawita, W.; Supartono, B. Low-Cost Pressure Sensor Matrix Using Velostat. In Proceedings of the 2017 5th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 6–7 November 2017; pp. 137–140, ISSN 2158-0456. [Google Scholar] [CrossRef]
- Hopkins, M.; Vaidyanathan, R.; Mcgregor, A.H. Examination of the Performance Characteristics of Velostat as an In-Socket Pressure Sensor. IEEE Sens. J. 2020, 20, 6992–7000. [Google Scholar] [CrossRef]
- Betker, A.L.; Szturm, T.; Moussavi, Z.K.; Nett, C. Video Game–Based Exercises for Balance Rehabilitation: A Single-Subject Design. Arch. Phys. Med. Rehabil. 2006, 87, 1141–1149. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, P.; Birchfield, D.; Qian, G.; Kidané, A. A pressure sensing floor for interactive media applications. In Proceedings of the 2005 ACM SIGCHI International Conference on Advances in Computer Entertainment Technology, New York, NY, USA, 15–17 June 2005; pp. 278–281. [Google Scholar] [CrossRef]
- Pierce, R.M.; Fedalei, E.A.; Kuchenbecker, K.J. A wearable device for controlling a robot gripper with fingertip contact, pressure, vibrotactile, and grip force feedback. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; pp. 19–25, ISSN 2324-7355. [Google Scholar] [CrossRef]
- Wulandari, C.F.; Fadlil, A. Center of Pressure Control for Balancing Humanoid Dance Robot Using Load Cell Sensor, Kalman Filter and PID Controller. Control Syst. Optim. Lett. 2023, 1, 75–81. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Default Uniform Geometry | Non-Uniform Optimised Geometry | Footprint Fitting Optimisation |
|---|---|---|---|
| Side Weight Shift | 21.44% | 6.09% | 4.05% |
| Front Weight Shift | 13.77% | 4.92% | 5.33% |
| Foot Slides | 16.91% | 5.40% | 2.40% |
| Average | 17.37% | 5.47% | 3.93% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bincalar, A.D.; Freeman, C.; schraefel, m.c. Optimal Algorithms for Improving Pressure-Sensitive Mat Centre of Pressure Measurements. Sensors 2025, 25, 1283. https://doi.org/10.3390/s25051283
Bincalar AD, Freeman C, schraefel mc. Optimal Algorithms for Improving Pressure-Sensitive Mat Centre of Pressure Measurements. Sensors. 2025; 25(5):1283. https://doi.org/10.3390/s25051283
Chicago/Turabian StyleBincalar, Alexander Dawid, Chris Freeman, and m.c. schraefel. 2025. "Optimal Algorithms for Improving Pressure-Sensitive Mat Centre of Pressure Measurements" Sensors 25, no. 5: 1283. https://doi.org/10.3390/s25051283
APA StyleBincalar, A. D., Freeman, C., & schraefel, m. c. (2025). Optimal Algorithms for Improving Pressure-Sensitive Mat Centre of Pressure Measurements. Sensors, 25(5), 1283. https://doi.org/10.3390/s25051283