
A Modified Preassigned Finite-Time Control Scheme for Spacecraft Large-Angle Attitude Maneuvering and Tracking


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- In contrast to previously developed preassigned finite-time control strategies [35,36], both angular velocity and torque constraints are explicitly addressed in this paper. The angular velocity constraint is incorporated by constructing a sliding-mode-like vector, which is subsequently constrained using the performance function. Additionally, an adaptive term is introduced to compensate for actuator saturation.
- (2)
- A modified preassigned finite-time function, incorporating an adaptive term, is introduced to address the control singularity caused by sudden external or internal disturbances during the steady state. The issue is not addressed in most of the current literature on preassigned finite-time control methods (e.g., [23,24,28]).
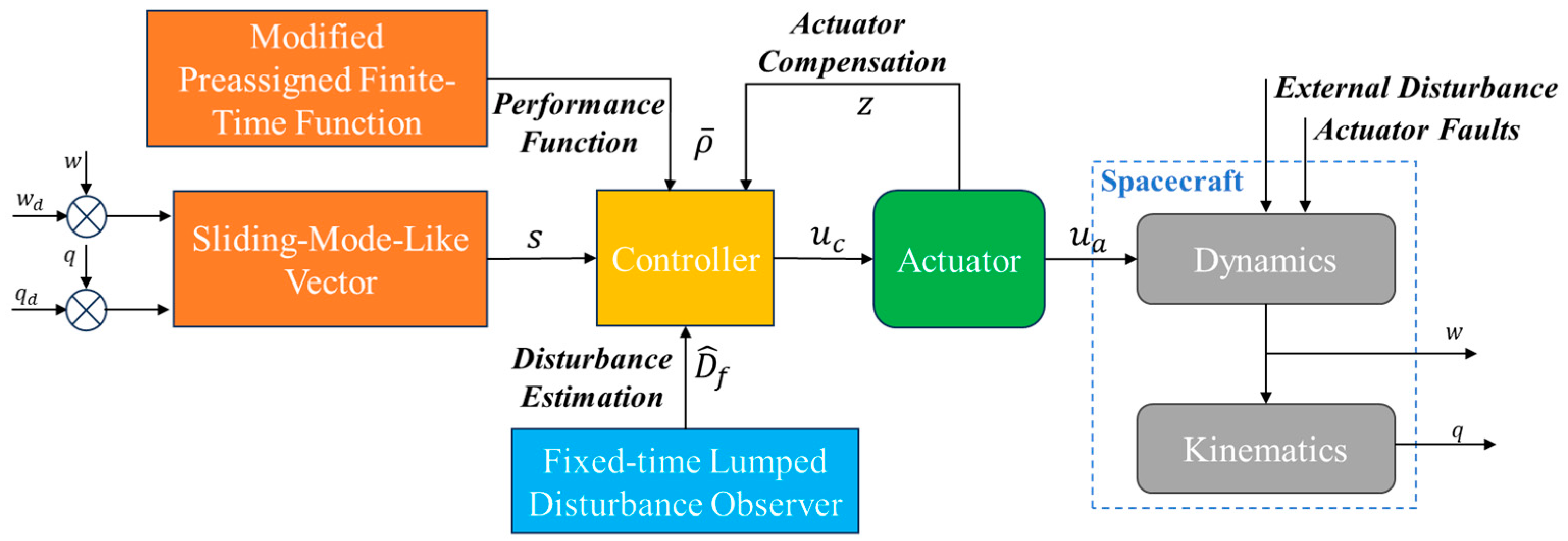
2. Methods
2.1. Spacecraft Model and Problem Formulation
2.1.1. Attitude Dynamics and Kinematics Model
2.1.2. Actuator Saturation Model
2.1.3. Attitude Error Dynamics and Kinematics
2.1.4. Control Objective
- (1)
- The attitude quaternion errors converge to a small residual set within a finite time, under the condition of angular velocity constraints.
- (2)
- The control singularity problem is avoided in the presence of sudden external or internal disturbances in the steady state.
2.2. Main Results and Analysis
2.2.1. Modified Preassigned Finite-Time Function (MPFTF)
2.2.2. Disturbance Observer
2.2.3. Controller Design
2.2.4. Stability Analysis
3. Simulation Results and Discussion
3.1. Simulation Scenarios and Parameter Settings
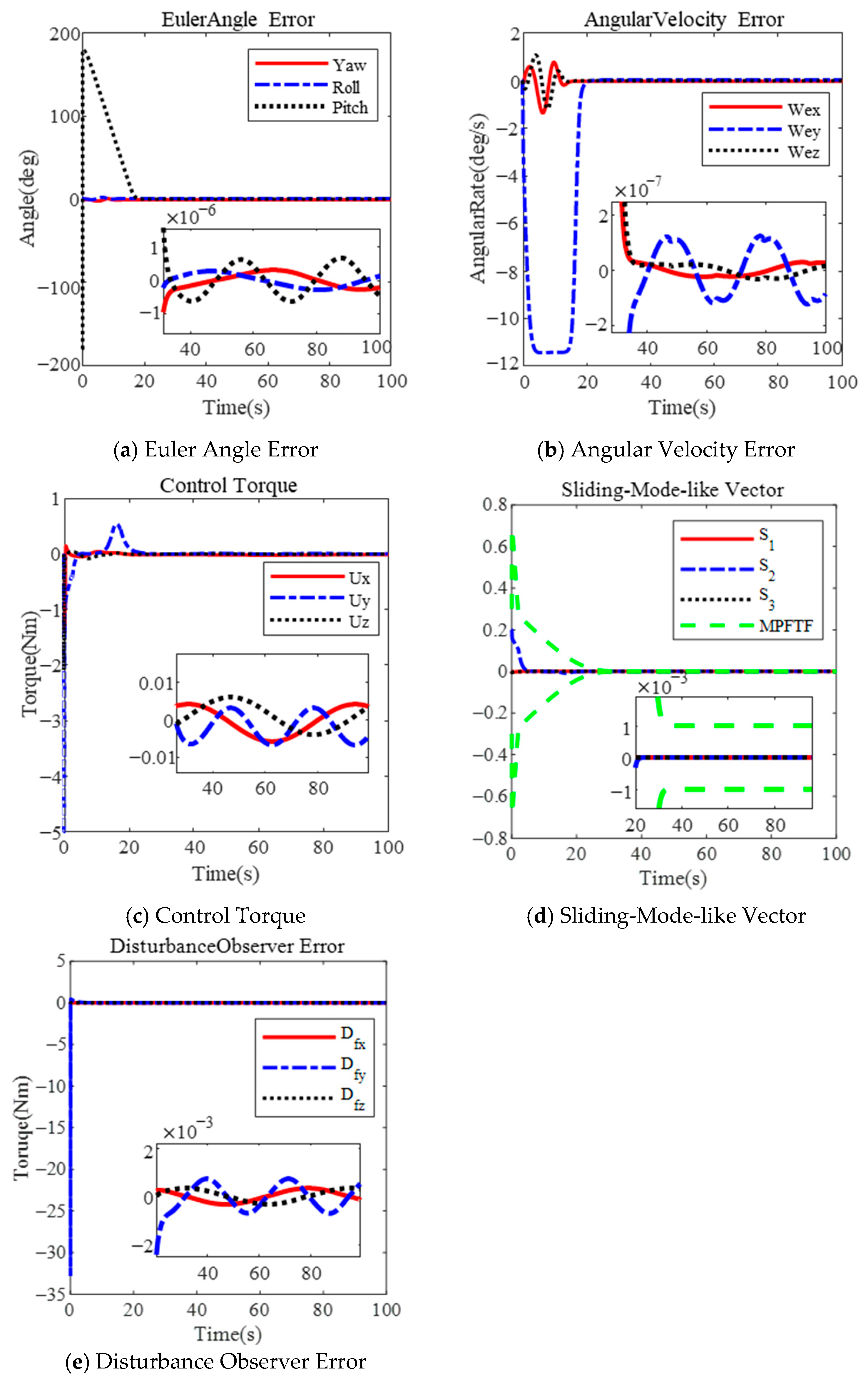
3.2. Attitude Maneuver
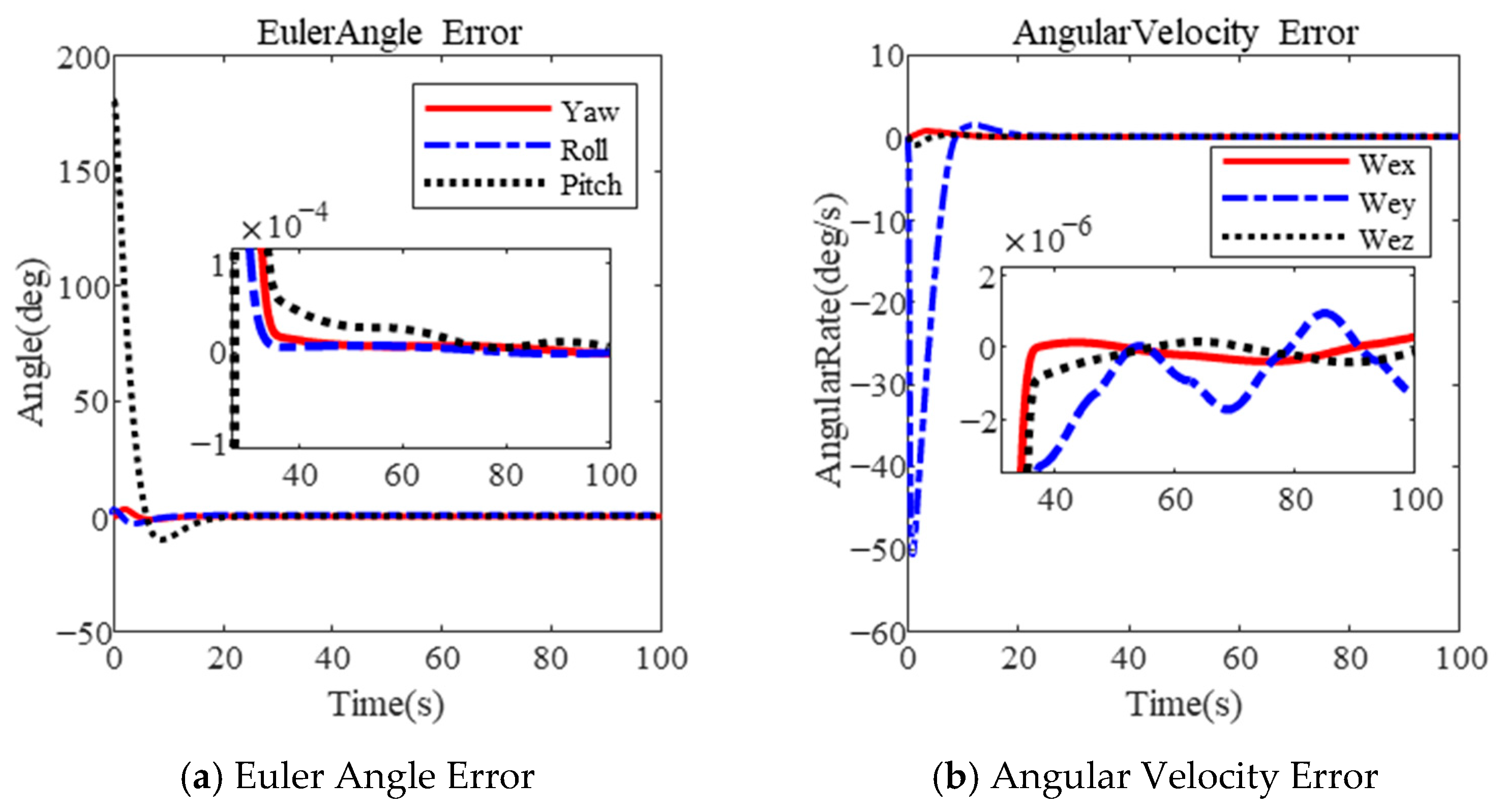
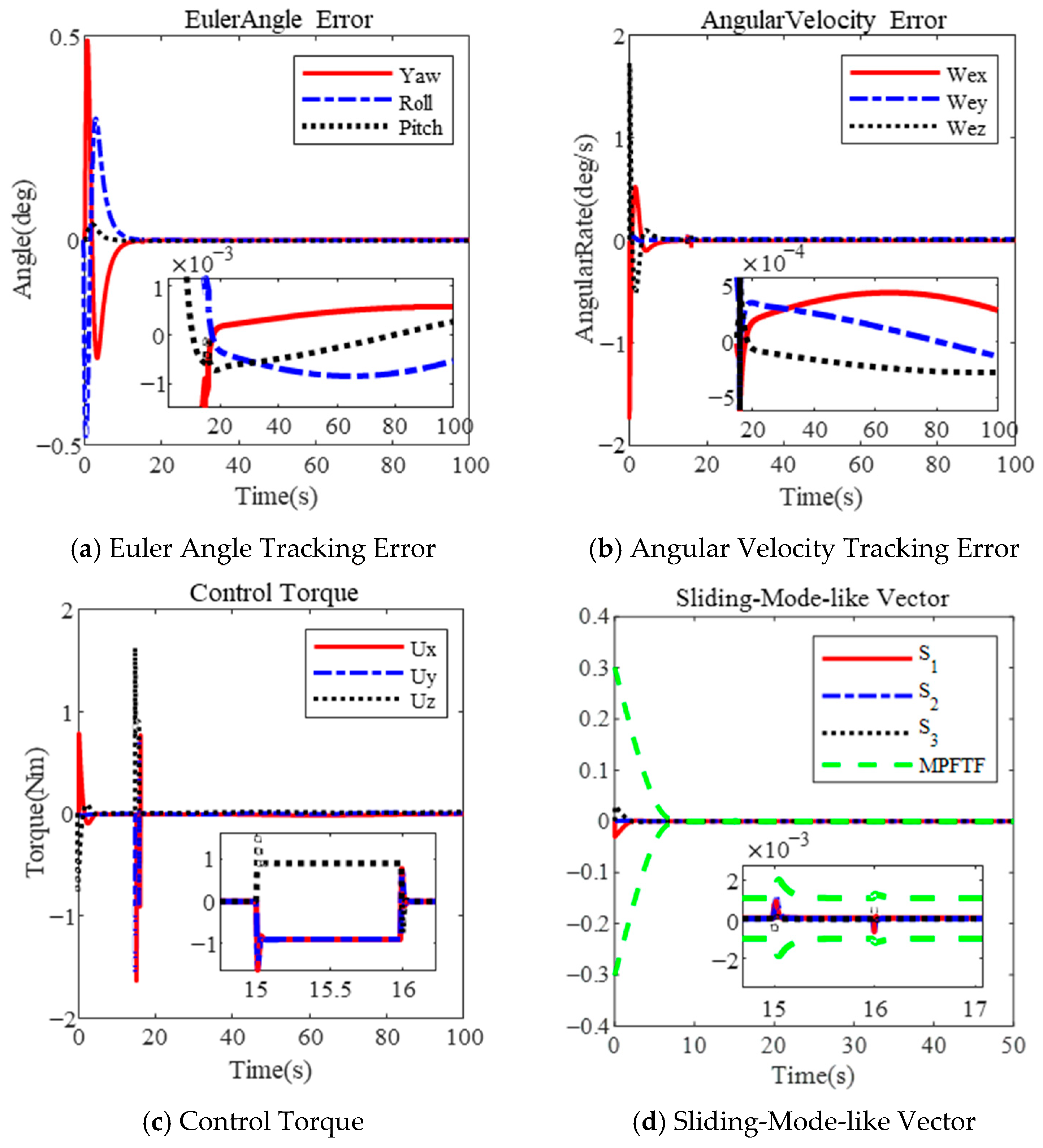
3.3. Attitude Tracking
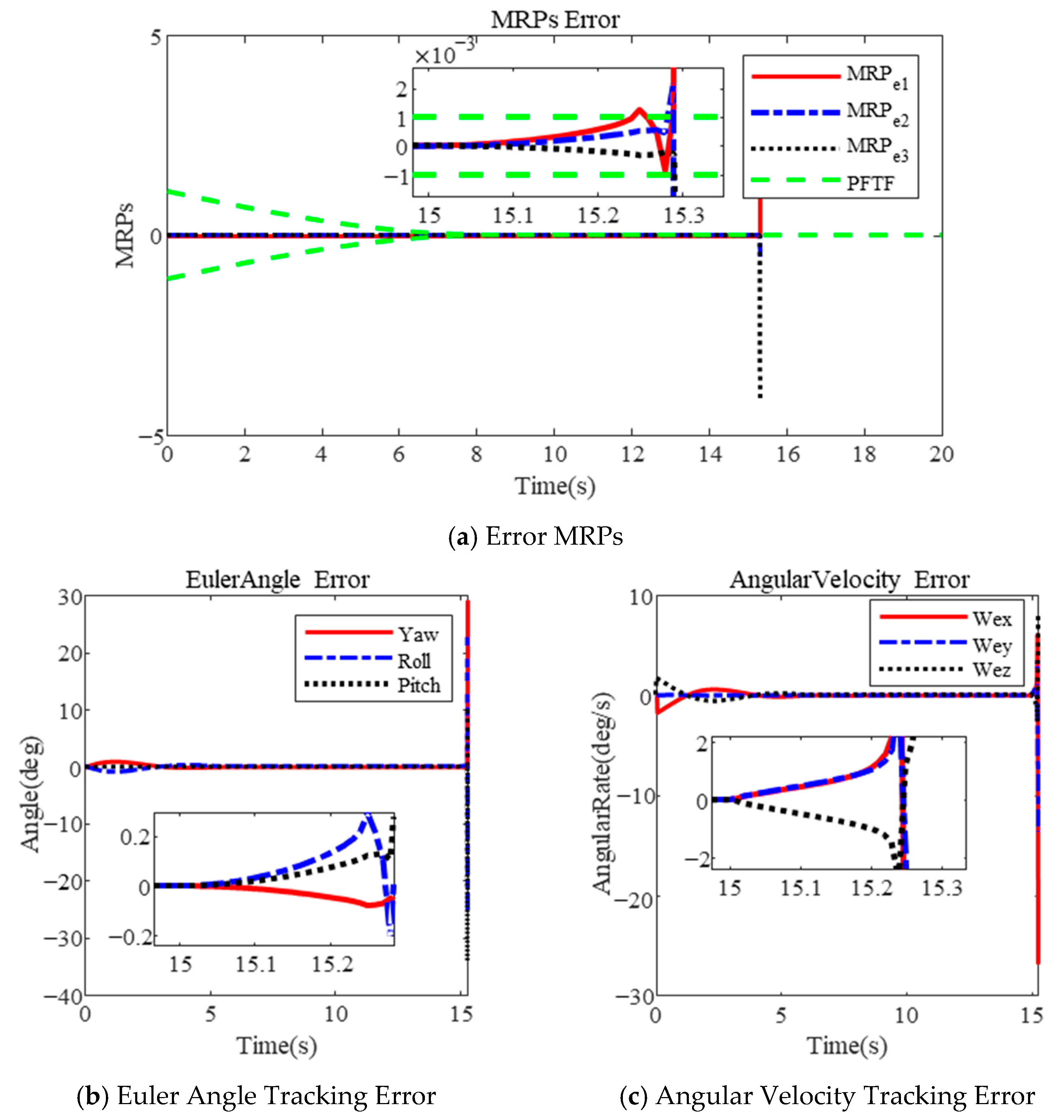
3.3.1. Attitude Tracking with Sudden External Disturbance
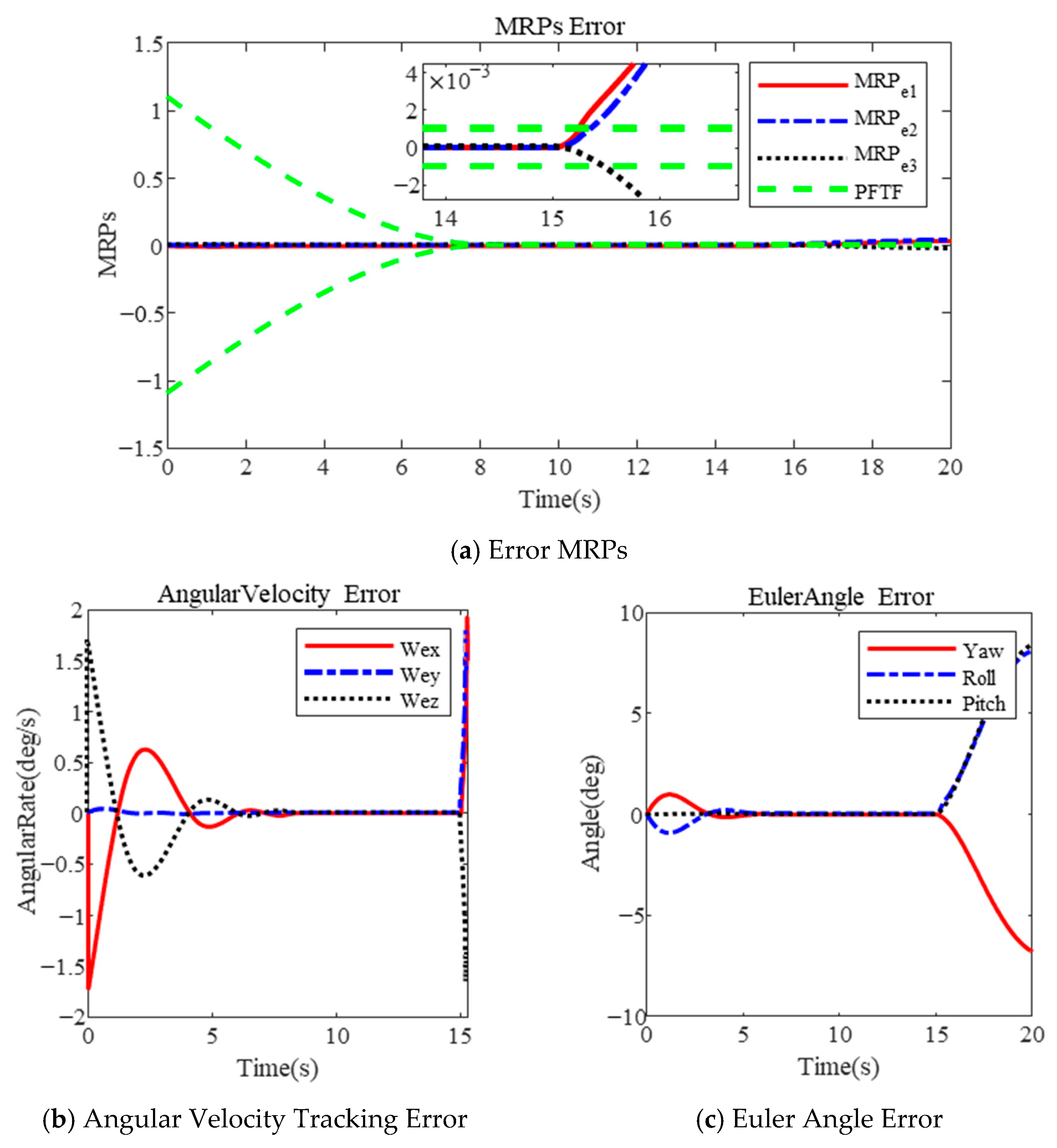
3.3.2. Attitude Tracking with Actuator Faults
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Papadopoulos, E.; Aghili, F.; Ma, O.; Lampariello, R. Robotic Manipulation and Capture in Space: A Survey. Front. Robot. AI 2021, 8, 686723. [Google Scholar] [CrossRef] [PubMed]
- Rybus, T. Robotic Manipulators for In-Orbit Servicing and Active Debris Removal: Review and Comparison. Prog. Aerosp. Sci. 2024, 151, 101055. [Google Scholar] [CrossRef]
- Murtaza, A.; Pirzada, S.J.H.; Xu, T.; Jianwei, L. Orbital Debris Threat for Space Sustainability and Way Forward (Review Article). IEEE Access 2020, 8, 61000–61019. [Google Scholar] [CrossRef]
- Chen, M.; Goyal, R.; Majji, M.; Skelton, R.E. Design and Analysis of a Growable Artificial Gravity Space Habitat. Aerosp. Sci. Technol. 2020, 106, 106147. [Google Scholar] [CrossRef]
- Chen, M. Review of Space Habitat Designs for Long Term Space Explorations. Prog. Aerosp. Sci. 2021, 122, 100692. [Google Scholar] [CrossRef]
- Longman, A.; Skelton, R.; Majji, M.; Sercel, J.; Peterson, C.; Shevtsov, J.; Chen, M.; Goyal, R. In-Space Fabrication and Growth of Affordable Large Interior Rotating Habitats. In Proceedings of the ASCEND 2020, Virtual Event, 16 November 2020; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar]
- Huang, Y. Integrated Robust Adaptive Tracking Control of Non-Cooperative Fly-around Mission Subject to Input Saturation and Full State Constraints. Aerosp. Sci. Technol. 2018, 79, 233–245. [Google Scholar] [CrossRef]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A Review of Space Robotics Technologies for On-Orbit Servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Han, F.; Zheng, M.-H.; Wang, F.; Hua, B.; Chen, Z.-M.; Cheng, Y.-H. Attitude Tracking Control for a Space Moving Target with High Dynamic Performance Using Hybrid Actuator. Aerosp. Sci. Technol. 2018, 78, 102–117. [Google Scholar] [CrossRef]
- Wen, C.; Zhou, J.; Liu, Z.; Su, H. Robust Adaptive Control of Uncertain Nonlinear Systems in the Presence of Input Saturation and External Disturbance. IEEE Trans. Automat. Contr. 2011, 56, 1672–1678. [Google Scholar] [CrossRef]
- De Ruiter, A.H.J. Observer-Based Adaptive Spacecraft Attitude Control With Guaranteed Performance Bounds. IEEE Trans. Automat. Contr. 2016, 61, 3146–3151. [Google Scholar] [CrossRef]
- Zhang, H.; Ye, D.; Xiao, Y.; Sun, Z. Adaptive Control on SE(3) for Spacecraft Pose Tracking With Harmonic Disturbance and Input Saturation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4578–4594. [Google Scholar] [CrossRef]
- Zou, A.; Kumar, K.D.; De Ruiter, A.H.J. Robust Attitude Tracking Control of Spacecraft under Control Input Magnitude and Rate Saturations. Int. J. Robust Nonlinear Control. 2016, 26, 799–815. [Google Scholar] [CrossRef]
- Cao, X.; Wu, B. Robust Spacecraft Attitude Tracking Control Using Hybrid Actuators with Uncertainties. Acta Astronaut. 2017, 136, 1–8. [Google Scholar] [CrossRef]
- Chen, W.; Hu, Q. Sliding-Mode-Based Attitude Tracking Control of Spacecraft Under Reaction Wheel Uncertainties. IEEE CAA J. Autom. Sinica 2023, 10, 1475–1487. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Guo, L. Adaptive Fault-Tolerant Attitude Tracking Control of Spacecraft With Prescribed Performance. IEEE ASME Trans. Mechatron. 2018, 23, 331–341. [Google Scholar] [CrossRef]
- Huang, Q.; Zhang, Y. Continuous Appointed-time Prescribed Performance Attitude Tracking Control for Rigid Spacecraft with Actuator Faults on SO(3). Int. J. Robust Nonlinear 2023, 34, 628–647. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Q.; Sun, C. Prescribed Performance Fault-Tolerant Control for Uncertain Nonlinear MIMO System Using Actor–Critic Learning Structure. IEEE Trans. Neural Netw. Learning Syst. 2022, 33, 4479–4490. [Google Scholar] [CrossRef]
- Zhao, Q.; Duan, G. Prescribed Performance Tracking Control for Spacecraft Proximity Operations with Inertia Property Identification. Aerosp. Sci. Technol. 2023, 141, 108555. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-Time Stability of Homogeneous Systems. In Proceedings of the 1997 American Control Conference (Cat. No.97CH36041); IEEE: Albuquerque, NM, USA, 1997; Volume 4, pp. 2513–2514. [Google Scholar]
- Du, H.; Li, S.; Qian, C. Finite-Time Attitude Tracking Control of Spacecraft With Application to Attitude Synchronization. IEEE Trans. Automat. Contr. 2011, 56, 2711–2717. [Google Scholar] [CrossRef]
- Wang, Z.; Su, Y.; Zhang, L. A New Nonsingular Terminal Sliding Mode Control for Rigid Spacecraft Attitude Tracking. J. Dyn. Syst. Meas. Control. 2018, 140, 051006. [Google Scholar] [CrossRef]
- Du, H.; Li, S. Finite-Time Attitude Stabilization for a Spacecraft Using Homogeneous Method. J. Guid. Control. Dyn. 2012, 35, 740–748. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Attitude Stabilization of Rigid Spacecraft with Finite-Time Convergence. Int. J. Robust Nonlinear Control. 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Yu, H. Adaptive Finite-Time Attitude Tracking Control for Spacecraft With Disturbances. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1297–1305. [Google Scholar] [CrossRef]
- Wu, Y.-Y.; Zhang, Y.; Wu, A.-G. Attitude Tracking Control for Rigid Spacecraft With Parameter Uncertainties. IEEE Access 2020, 8, 38663–38672. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y.; Yu, C.; Liu, H. Finite-Time Tracking Control of Rigid Spacecraft Under Actuator Saturations and Faults. IEEE Trans. Automat. Sci. Eng. 2016, 13, 368–381. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Niu, X.; Song, X. Adaptive Nonsingular Terminal Sliding Mode Control for Attitude Tracking of Spacecraft With Actuator Faults. IEEE Access 2019, 7, 31485–31493. [Google Scholar] [CrossRef]
- Ilchmann, A.; Ryan, E.P.; Sangwin, C.J. Tracking with prescribed transient behaviour. ESAIM Control. Optim. Calc. Var. 2002, 7, 471–493. [Google Scholar] [CrossRef]
- Hopfe, N.; Ilchmann, A.; Ryan, E.P. Funnel Control With Saturation: Linear MIMO Systems. IEEE Trans. Autom. Control. 2010, 55, 532–538. [Google Scholar] [CrossRef]
- Ilchmann, A.; Ryan, E.P.; Townsend, P. Tracking Control with Prescribed Transient Behaviour for Systems of Known Relative Degree. Syst. Control. Lett. 2006, 55, 396–406. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems With Prescribed Performance. IEEE Trans. Automat. Contr. 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Hu, Y.; Geng, Y.; Wu, B.; Wang, D. Model-Free Prescribed Performance Control for Spacecraft Attitude Tracking. IEEE Trans. Contr. Syst. Technol. 2021, 29, 165–179. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Chen, X.; Qiu, J. Direct Adaptive Preassigned Finite-Time Control With Time-Delay and Quantized Input Using Neural Network. IEEE Trans. Neural Netw. Learning Syst. 2020, 31, 1222–1231. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.-Y.; Zhang, Y.; Wu, A.-G. Preassigned Finite-Time Attitude Control for Spacecraft Based on Time-Varying Barrier Lyapunov Functions. Aerosp. Sci. Technol. 2021, 108, 106331. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. A Novel Finite-Time Prescribed Performance Control Scheme for Spacecraft Attitude Tracking. Aerosp. Sci. Technol. 2021, 118, 107044. [Google Scholar] [CrossRef]
- Zuo, G.; Wang, Y. Adaptive Prescribed Finite Time Control for Strict-Feedback Systems. IEEE Trans. Automat. Contr. 2023, 68, 5729–5736. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the Control of Output-Constrained Nonlinear Systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Romdlony, M.Z.; Jayawardhana, B. Stabilization with Guaranteed Safety Using Control Lyapunov–Barrier Function. Automatica 2016, 66, 39–47. [Google Scholar] [CrossRef]
- Liu, C.; Dong, C.; Zhou, Z.; Wang, Z. Barrier Lyapunov Function Based Reinforcement Learning Control for Air-Breathing Hypersonic Vehicle with Variable Geometry Inlet. Aerosp. Sci. Technol. 2020, 96, 105537. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, P.; Meng, Z. Adaptive Neural Network Dynamic Surface Control of the Post-Capture Tethered Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1406–1419. [Google Scholar] [CrossRef]
- Gao, S.; Liu, X.; Jing, Y.; Dimirovski, G.M. Finite-Time Prescribed Performance Control for Spacecraft Attitude Tracking. IEEE ASME Trans. Mechatron. 2022, 27, 3087–3098. [Google Scholar] [CrossRef]
- Shao, X.; Hu, Q.; Shi, Y.; Jiang, B. Fault-Tolerant Prescribed Performance Attitude Tracking Control for Spacecraft Under Input Saturation. IEEE Trans. Contr. Syst. Technol. 2020, 28, 574–582. [Google Scholar] [CrossRef]
- Beibei Ren; Shuzhi Sam Ge; Keng Peng Tee; Tong Heng Lee Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [CrossRef] [PubMed]
- Su, Y.; Shen, S. Adaptive Predefined-Time Fault-Tolerant Attitude Tracking Control for Rigid Spacecraft with Guaranteed Performance. Acta Astronaut. 2024, 214, 677–688. [Google Scholar] [CrossRef]
- Wang, Y. Integrated Relative Position and Attitude Control for Spacecraft Rendezvous with ISS and Finite-Time Convergence. Aerosp. Sci. Technol. 2019, 85, 234–245. [Google Scholar] [CrossRef]
- Ma, D.; Xia, Y.; Shen, G.; Jiang, H.; Hao, C. Practical Fixed-Time Disturbance Rejection Control for Quadrotor Attitude Tracking. IEEE Trans. Ind. Electron. 2021, 68, 7274–7283. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Liu, Y.; Cheng, Y.; Zhao, K. A Modified Preassigned Finite-Time Control Scheme for Spacecraft Large-Angle Attitude Maneuvering and Tracking. Sensors 2025, 25, 986. https://doi.org/10.3390/s25030986
Ma X, Liu Y, Cheng Y, Zhao K. A Modified Preassigned Finite-Time Control Scheme for Spacecraft Large-Angle Attitude Maneuvering and Tracking. Sensors. 2025; 25(3):986. https://doi.org/10.3390/s25030986
Chicago/Turabian StyleMa, Xudong, Yuan Liu, Yi Cheng, and Kun Zhao. 2025. "A Modified Preassigned Finite-Time Control Scheme for Spacecraft Large-Angle Attitude Maneuvering and Tracking" Sensors 25, no. 3: 986. https://doi.org/10.3390/s25030986
APA StyleMa, X., Liu, Y., Cheng, Y., & Zhao, K. (2025). A Modified Preassigned Finite-Time Control Scheme for Spacecraft Large-Angle Attitude Maneuvering and Tracking. Sensors, 25(3), 986. https://doi.org/10.3390/s25030986