
Noise Analysis for Correlation-Assisted Direct Time-of-Flight





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Discussion of the Pixel Architecture
3. Consequences of SPAD Non-Idealities on Pixel Operation
3.1. The Effect of Internal Timing Jitter
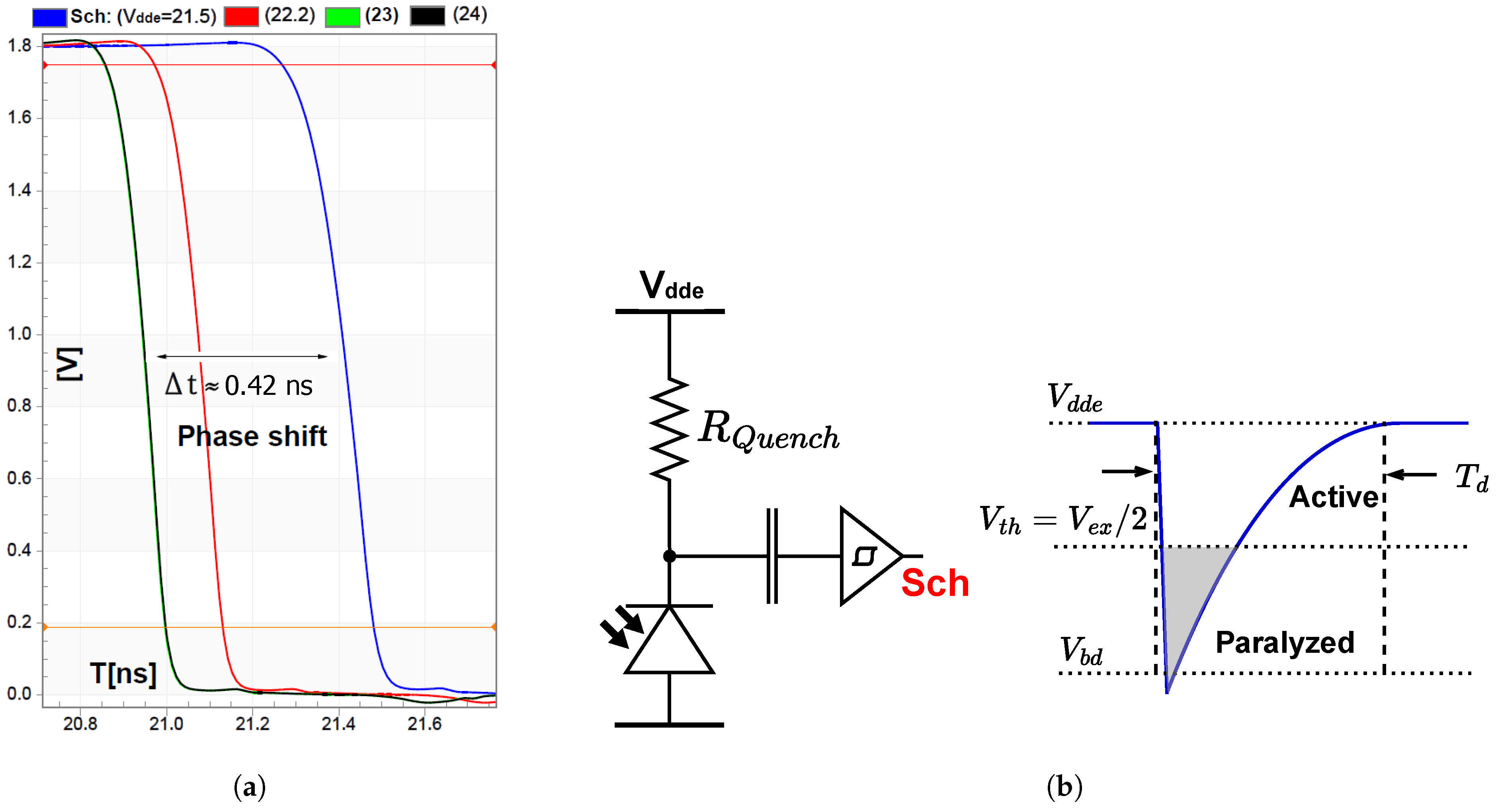
3.2. The Effect of the Bias Voltage
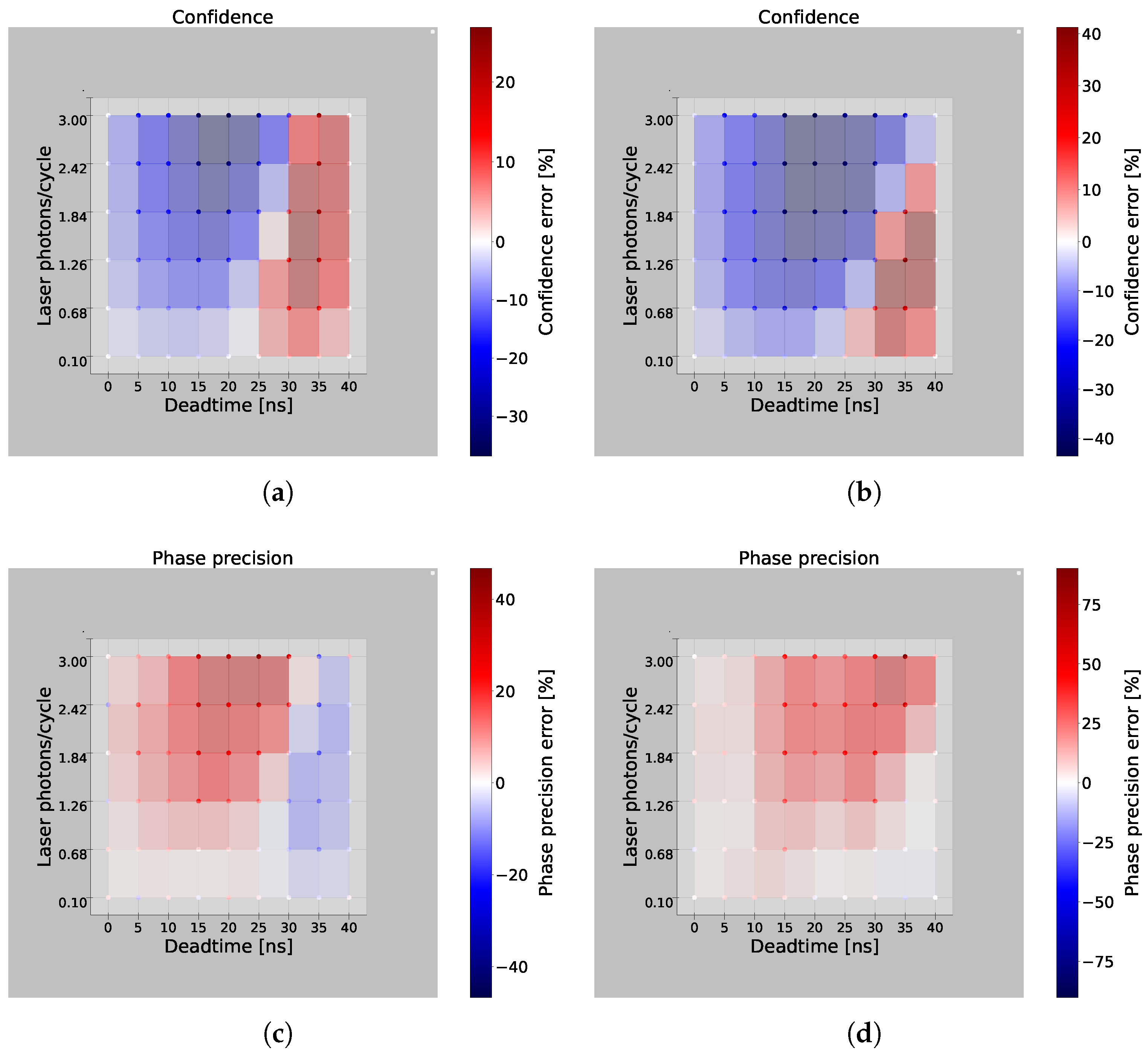
3.3. Deadtime Shadowing Effect
4. Temporal and Spatial Noise Contributions of Electronic Circuitry
4.1. kTC Noise
4.2. Switch Parasitics
4.3. Multi-Stage Sampler
4.4. Fully-Differential Readout
5. Analysis of the Pixel Performance
5.1. Amplitude Mismatch and Offset Error Effects
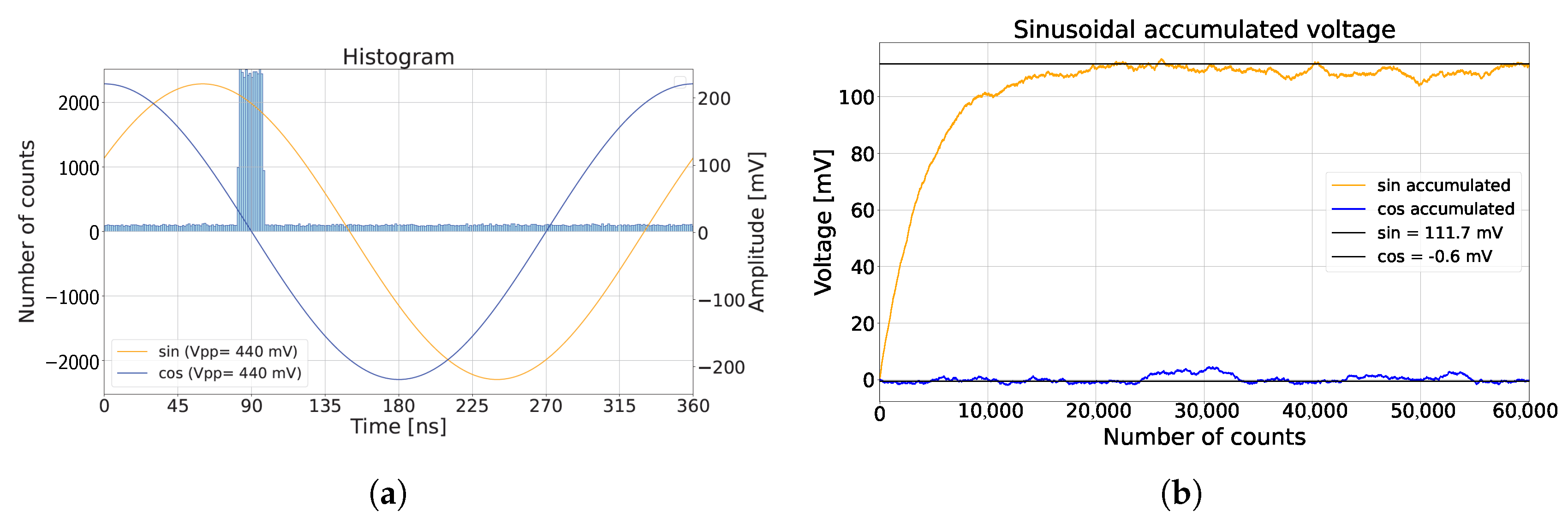
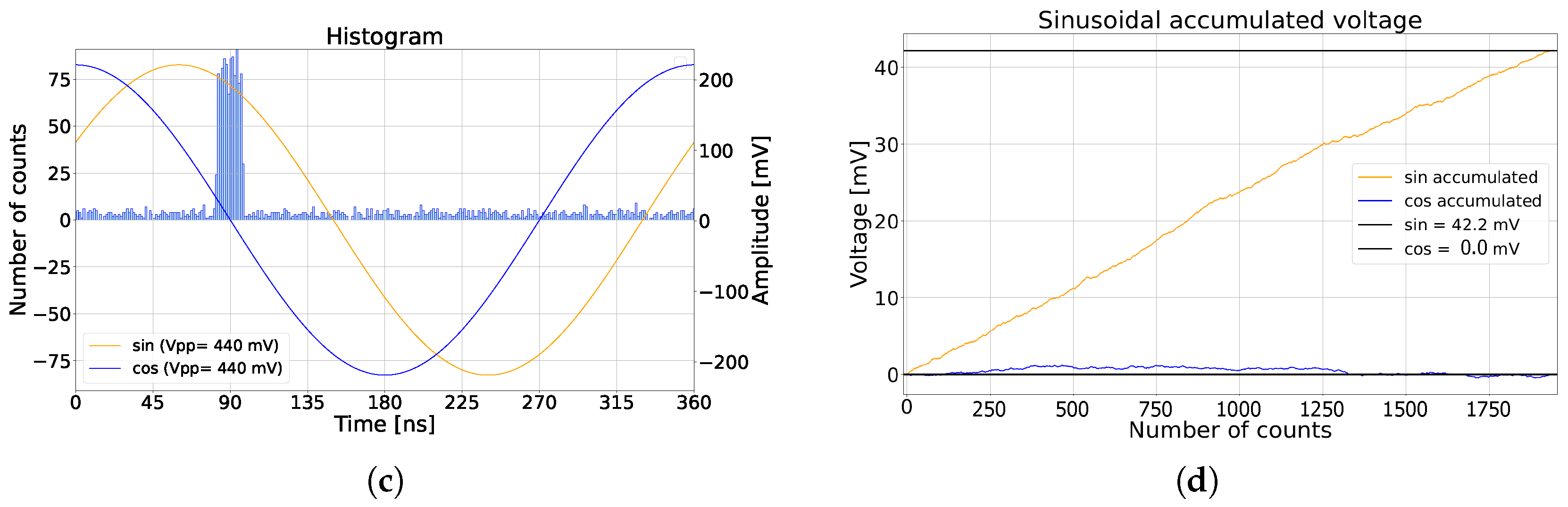
5.2. Sinusoidal and Triangular Input Signals
5.2.1. Triangular Amplitude
5.2.2. Triangular Amplitude Precision
5.2.3. Triangular Phase
5.2.4. Triangular and Sinusoidal Signal Comparison
6. Thoughts on Improvements in the Pixel Design
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Triangular Signal Formulas
Appendix A.1
Appendix B. Sinusoidal Signal Formulas
References
- Bastos, D.; Monteiro, P.P.; Oliveira, A.S.R.; Drummond, M.V. An Overview of LiDAR Requirements and Techniques for Autonomous Driving. In Proceedings of the 2021 Telecoms Conference (ConfTELE), Leiria, Portugal, 11–12 February 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Blahnik, V.; Schindelbeck, O. Smartphone imaging technology and its applications. Adv. Opt. Technol. 2021, 10, 145–232. [Google Scholar] [CrossRef]
- Marc, Y. LiDAR: Apple LiDAR Analysis. Available online: https://4sense.medium.com/lidar-591apple-lidar-and-dtof-analysis-cc18056ec41a (accessed on 26 January 2025).
- Foix, S.; Alenya, G.; Torras, C. Lock-in Time-of-Flight (ToF) Cameras: A Survey. IEEE Sensors J. 2011, 11, 1917–1926. [Google Scholar] [CrossRef]
- Bamji, C.; Godbaz, J.; Oh, M.; Mehta, S.; Payne, A.; Ortiz, S.; Nagaraja, S.; Perry, T.; Thompson, B. A Review of Indirect Time-of-Flight Technologies. IEEE Trans. Electron Devices 2022, 69, 2779–2793. [Google Scholar] [CrossRef]
- Rapp, H.; Frank, M.; Hamprecht, F.A.; Jahne, B. A theoretical and experimental investigation of the systematic errors and statistical uncertainties of Time-Of-Flight-cameras. Int. J. Intell. Syst. Technol. Appl. 2008, 5, 402. [Google Scholar] [CrossRef]
- Horaud, R.; Hansard, M.; Evangelidis, G.; Ménier, C. An overview of depth cameras and range scanners based on time-of-flight technologies. Mach. Vis. Appl. 2016, 27, 1005–1020. [Google Scholar] [CrossRef]
- Gyongy, I.; Dutton, N.A.W.; Henderson, R.K. Direct Time-of-Flight Single-Photon Imaging. IEEE Trans. Electron Devices 2022, 69, 2794–2805. [Google Scholar] [CrossRef]
- Gnecchi, S.; Dutton, N.A.W.; Parmesan, L.; Rae, B.R.; Pellegrini, S.; McLeod, S.J.; Grant, L.A.; Henderson, R.K. Digital Silicon Photomultipliers With OR/XOR Pulse Combining Techniques. IEEE Trans. Electron Devices 2016, 63, 1105–1110. [Google Scholar] [CrossRef]
- Patanwala, S.M.; Gyongy, I.; Mai, H.; Aßmann, A.; Dutton, N.A.W.; Rae, B.R.; Henderson, R.K. A High-Throughput Photon Processing Technique for Range Extension of SPAD-Based LiDAR Receivers. IEEE Open J. Solid-State Circuits Soc. 2022, 2, 12–25. [Google Scholar] [CrossRef]
- Niclass, C.; Soga, M.; Matsubara, H.; Ogawa, M.; Kagami, M. A 0.18-μm CMOS SoC for a 100-m-Range 10-Frame/s 200 ×96-Pixel Time-of-Flight Depth Sensor. IEEE J. Solid-State Circuits 2014, 49, 315–330. [Google Scholar] [CrossRef]
- Parsakordasiabi, M.; Vornicu, I.; Rodríguez-Vázquez, L.; Carmona-Galán, R. A Low-Resources TDC for Multi-Channel Direct ToF Readout Based on a 28-nm FPGA. Sensors 2021, 21, 308. [Google Scholar] [CrossRef]
- Patanwala, S.M.; Gyongy, I.; Dutton, N.A.; Rae, B.R.; Henderson, R.K. A reconfigurable 40 nm CMOS SPAD array for LiDAR receiver validation. In Proceedings of the International Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 June 2019; pp. 1–4. [Google Scholar]
- Yasutomi, K.; Usui, T.; Han, S.M.; Takasawa, T.; Kagawa, K.; Kawahito, S. 7.5 A 0.3mm-resolution Time-of-Flight CMOS range imager with column-gating clock-skew calibration. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 132–133. [Google Scholar] [CrossRef]
- Keel, M.S.; Jin, e. A VGA Indirect Time-of-Flight CMOS Image Sensor with 4-Tap 7-μm Global-Shutter Pixel and Fixed-Pattern Phase Noise Self-Compensation. IEEE J. Solid-State Circuits 2020, 55, 889–897. [Google Scholar] [CrossRef]
- Kim, J.e. Indirect Time-of-Flight CMOS Image Sensor With On-Chip Background Light Cancelling and Pseudo-Four-Tap/Two-Tap Hybrid Imaging for Motion Artifact Suppression. IEEE J. Solid-State Circuits 2020, 55, 2849–2865. [Google Scholar] [CrossRef]
- Bamji, C.; Mehta, S.; Thompson, B.; Elkhatib, T.; Wurster, S.; Akkaya, O.; Payne, A.; Godbaz, J.; Fenton, M.; Rajasekaran, V.; et al. IMpixel 65nm BSI 320MHz demodulated TOF Image sensor with 3 μm global shutter pixels and analog binning. In Proceedings of the 2018 IEEE International Solid-State Circuits Conference—(ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 94–96. [Google Scholar] [CrossRef]
- Chae, Y.; Cheon, J.; Lim, S.; Kwon, M.; Yoo, K.; Jung, W.; Lee, D.H.; Ham, S.; Han, G. A 2.1 M Pixels, 120 Frame/s CMOS Image Sensor With Column-Parallel ΔΣ ADC Architecture. IEEE J. Solid-State Circuits 2011, 46, 236–247. [Google Scholar] [CrossRef]
- Kim, H.J. 11-bit Column-Parallel Single-Slope ADC With First-Step Half-Reference Ramping Scheme for High-Speed CMOS Image Sensors. IEEE J. Solid-State Circuits 2021, 56, 2132–2141. [Google Scholar] [CrossRef]
- Morsy, A.; Baijot, C.; Jegannathan, G.; Lapauw, T.; Dries, T.V.d.; Kuijk, M. An In-Pixel Ambient Suppression Method for Direct Time of Flight. IEEE Sensors Lett. 2024, 8, 1–4. [Google Scholar] [CrossRef]
- Morsy, A.; Kuijk, M. Correlation-Assisted Pixel Array for Direct Time of Flight. Sensors 2024, 24, 5380. [Google Scholar] [CrossRef] [PubMed]
- Razavi, B. Design of Analog CMOS Integrated Circuits, Chapter 7 Noise, Section 7.2; McGraw-Hill Education: New York, NY, USA, 2017. [Google Scholar]
- Wegmann, G.; Vittoz, E.A.; Rahali, F. Charge injection in analog MOS switches. IEEE J. Solid-State Circuits 1987, 22, 1091–1097. [Google Scholar] [CrossRef]
- Degerli, Y.; Lavernhe, F.; Magnan, P.; Farre, J. Analysis and reduction of signal readout circuitry temporal noise in CMOS image sensors for low-light levels. IEEE Trans. Electron Devices 2000, 47, 949–962. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morsy, A.; Vrijsen, J.; Coosemans, J.; Bruneel, T.; Kuijk, M. Noise Analysis for Correlation-Assisted Direct Time-of-Flight. Sensors 2025, 25, 771. https://doi.org/10.3390/s25030771
Morsy A, Vrijsen J, Coosemans J, Bruneel T, Kuijk M. Noise Analysis for Correlation-Assisted Direct Time-of-Flight. Sensors. 2025; 25(3):771. https://doi.org/10.3390/s25030771
Chicago/Turabian StyleMorsy, Ayman, Jonathan Vrijsen, Jan Coosemans, Tuur Bruneel, and Maarten Kuijk. 2025. "Noise Analysis for Correlation-Assisted Direct Time-of-Flight" Sensors 25, no. 3: 771. https://doi.org/10.3390/s25030771
APA StyleMorsy, A., Vrijsen, J., Coosemans, J., Bruneel, T., & Kuijk, M. (2025). Noise Analysis for Correlation-Assisted Direct Time-of-Flight. Sensors, 25(3), 771. https://doi.org/10.3390/s25030771