
An Active Control Method for a Lower Limb Rehabilitation Robot with Human Motion Intention Recognition


Abstract
1. Introduction
2. Methods
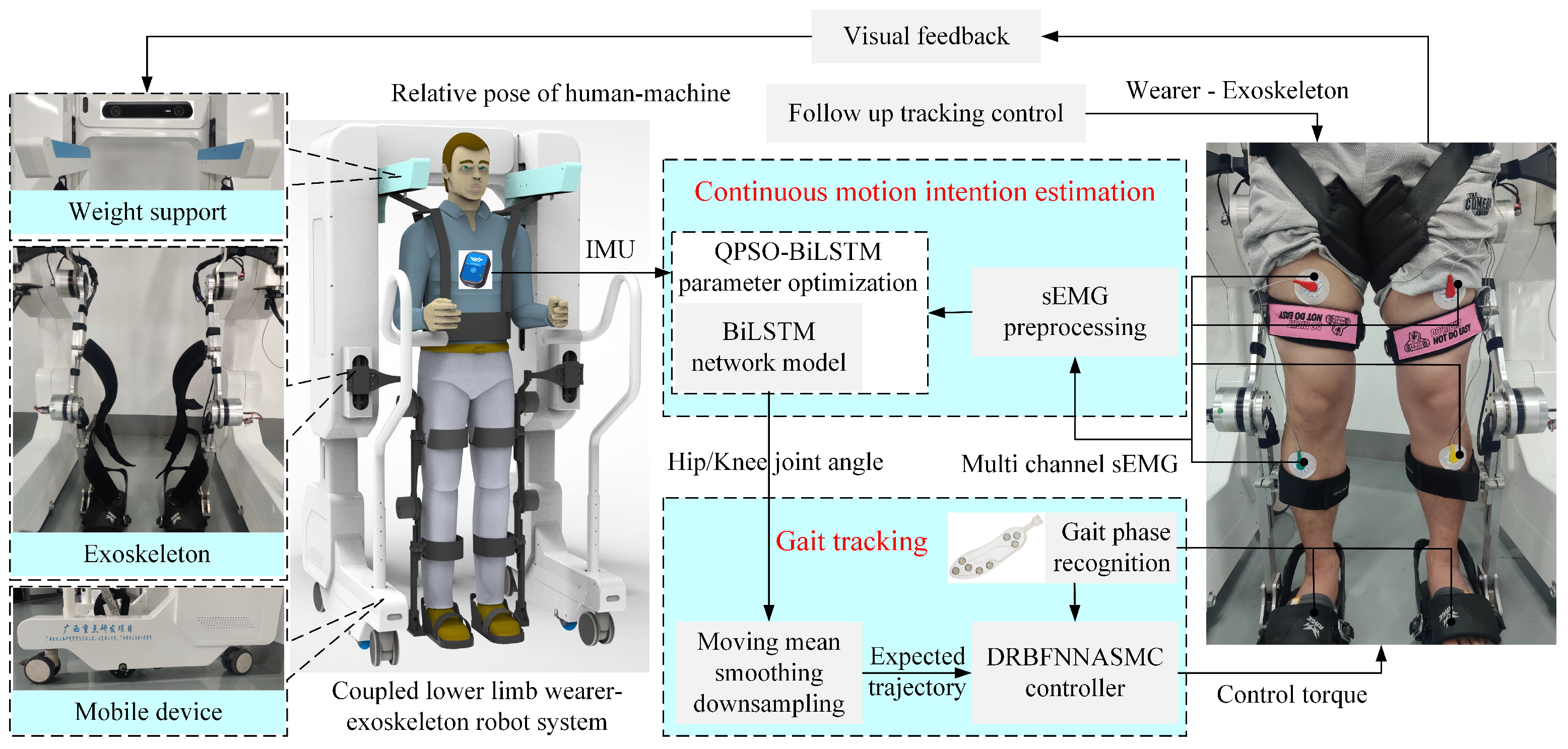
2.1. Overall System Framework
2.2. Vision-Driven Follow-Up Tracking Control
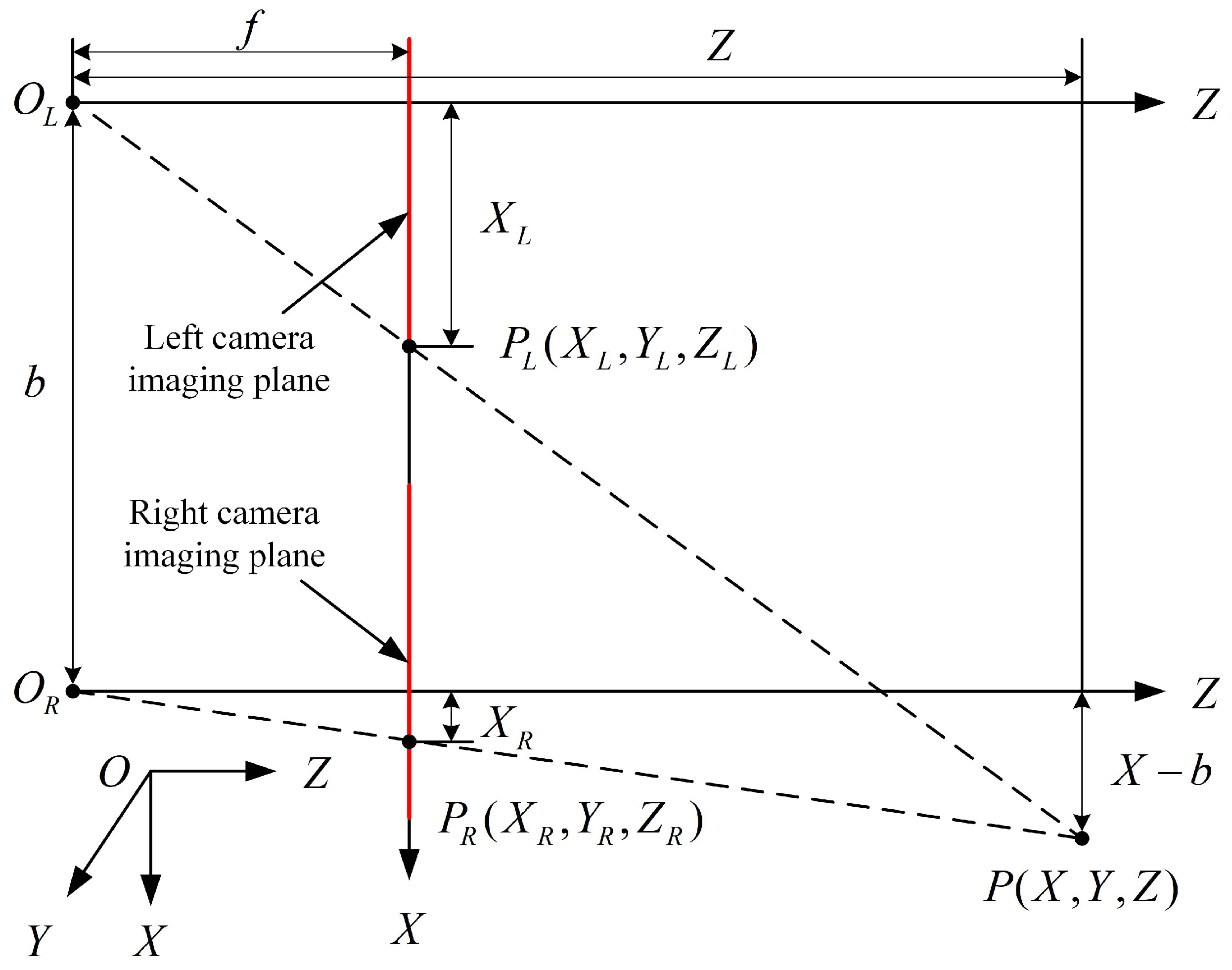
2.2.1. Three-Dimensional Human Information Extraction Based on Python-OpenPose and Binocular Vision
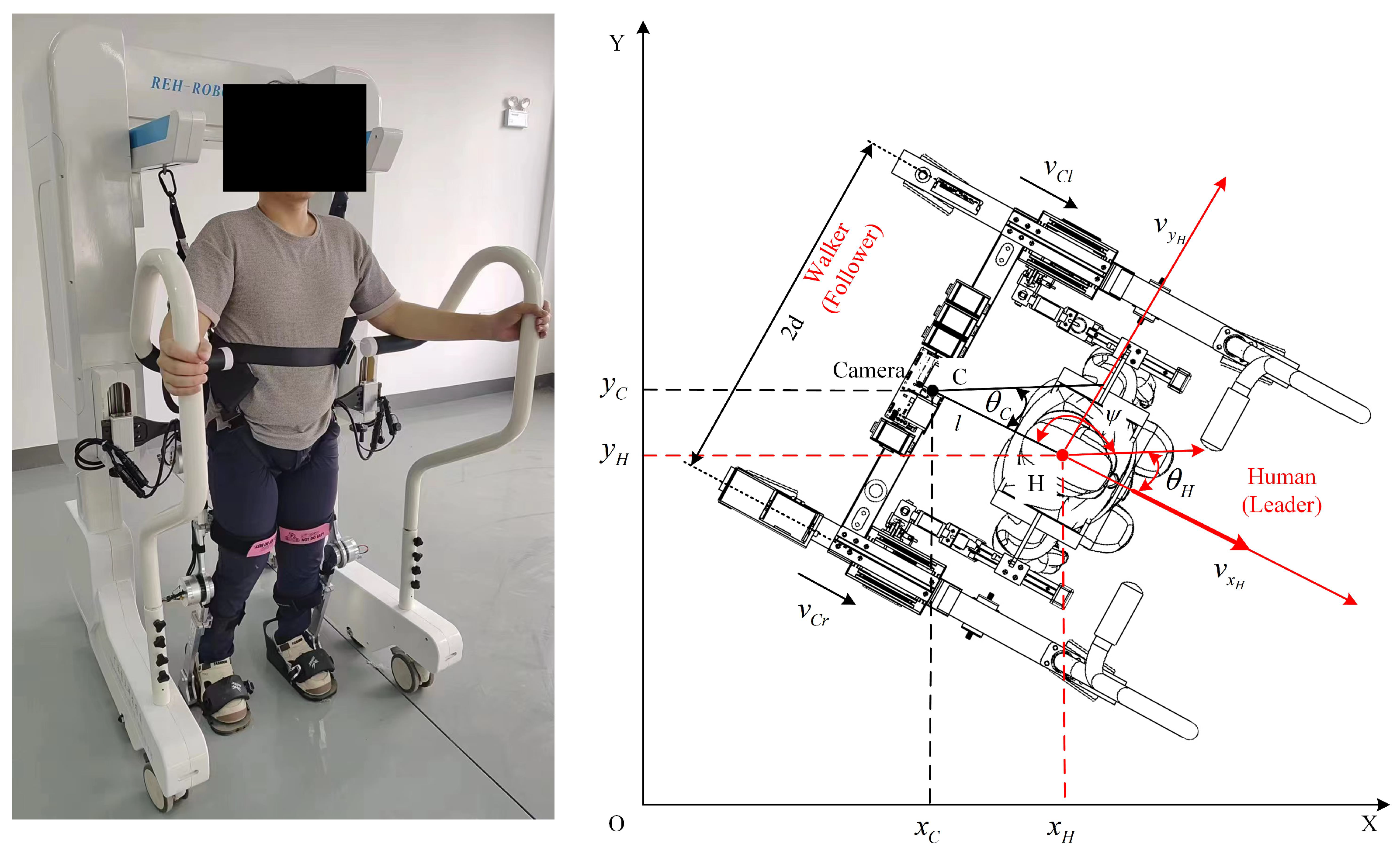
2.2.2. Follow-Up Assistive Frame Tracking Control
2.3. Human Motion Intention Recognition
2.3.1. Quantum-Behaved Particle Swarm Optimization
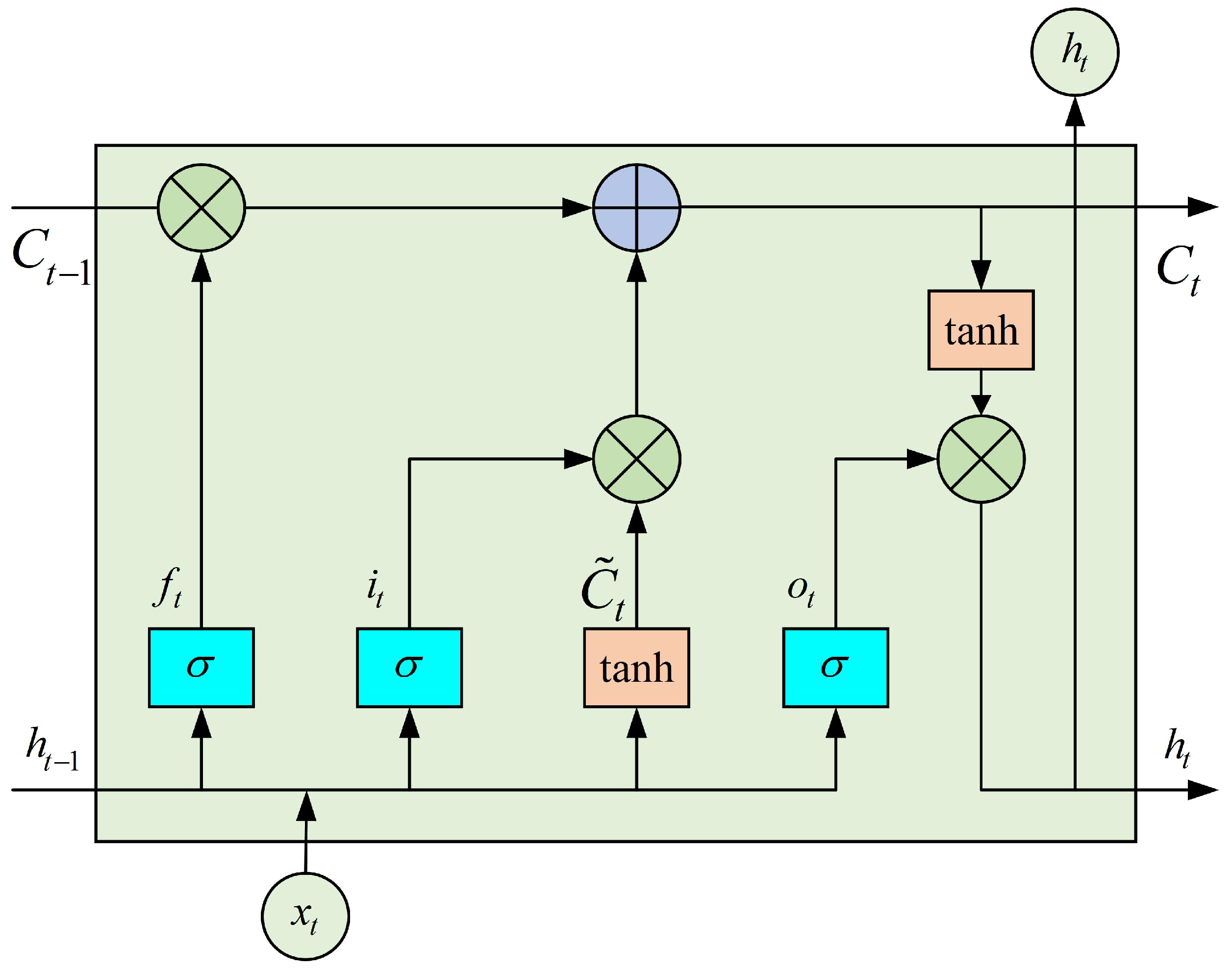
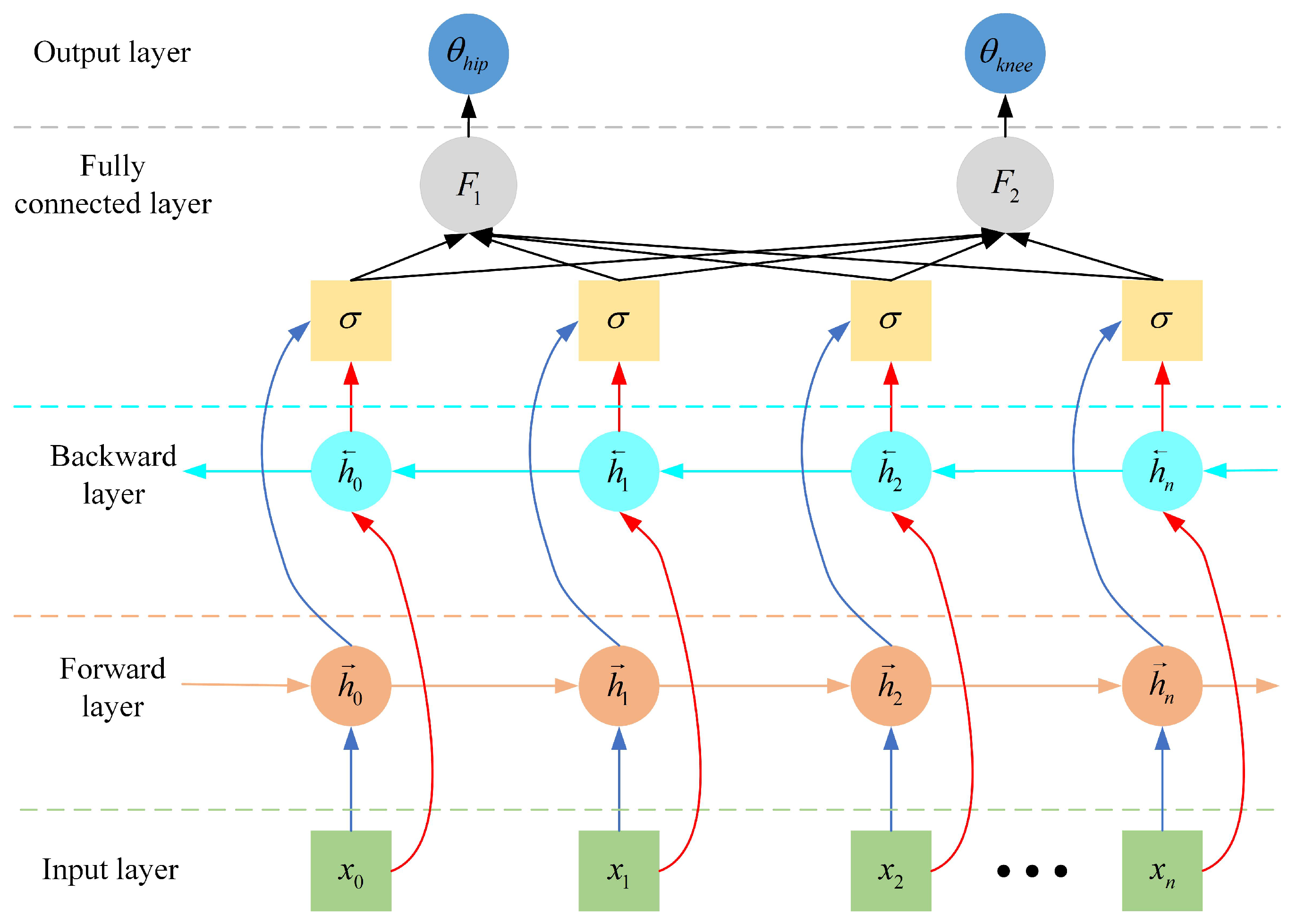
2.3.2. BiLSTM Network
2.3.3. QPSO-BiLSTM Gait Trajectory Prediction

2.4. Control of Trajectory Tracking for LEERR Based on Motion Intent
3. Results
3.1. Data Collection and Preprocessing
3.2. Follow-Up Tracking Control Experiment
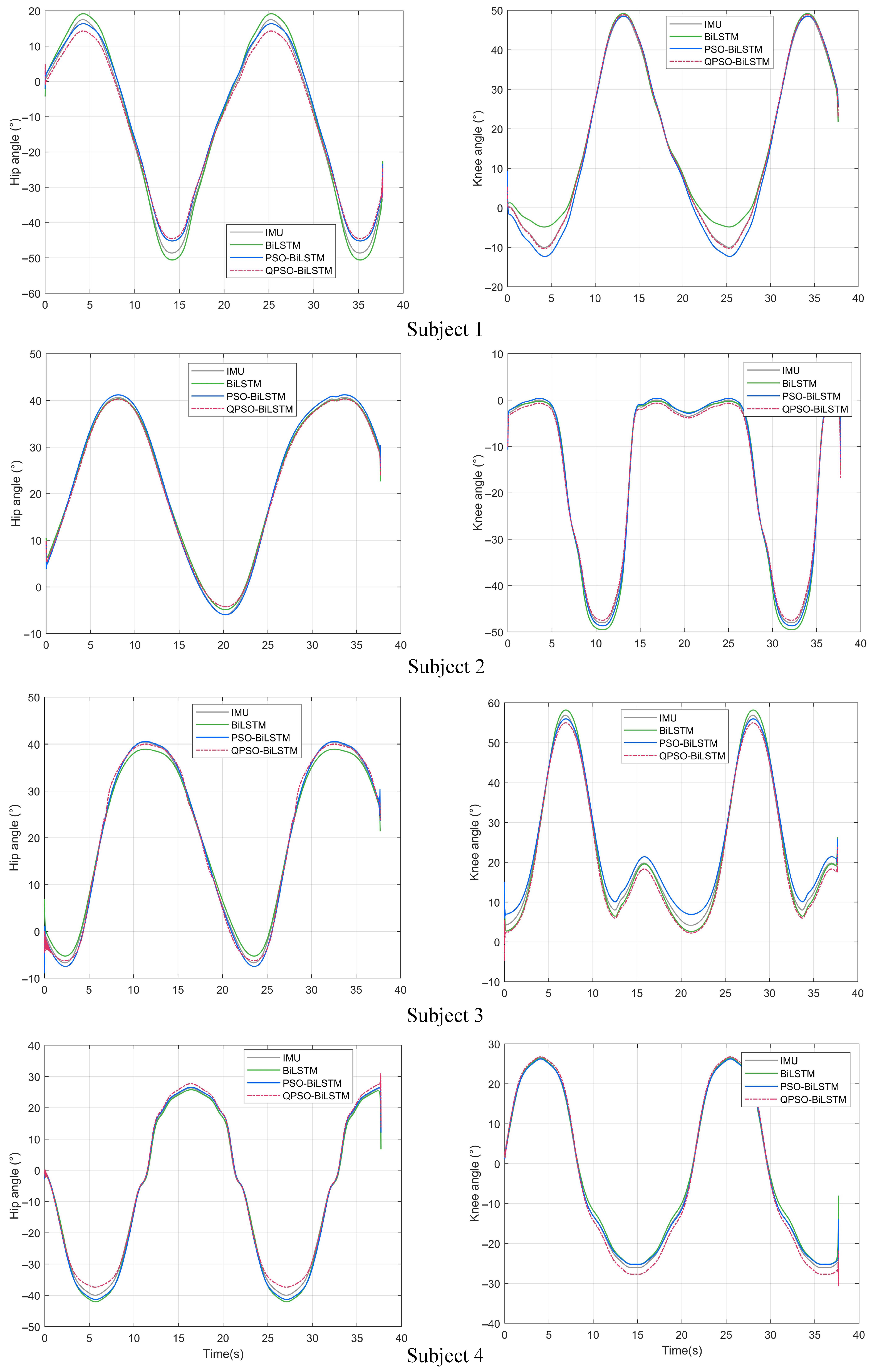
3.3. QPSO-BiLSTM Network Training and Gait Prediction
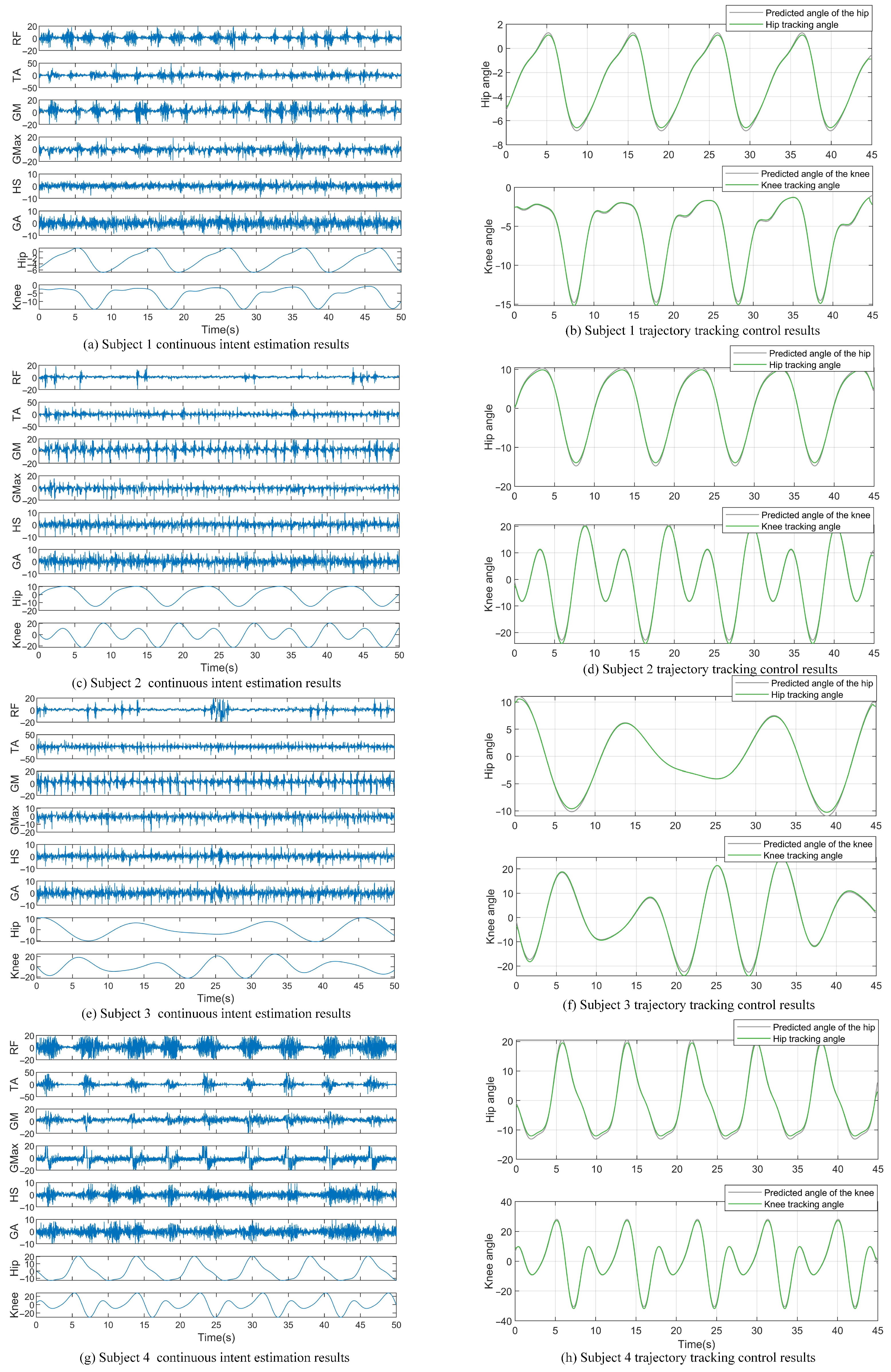
3.4. LEERR Trajectory Tracking Control Experiment Based on Motion Intention Recognition
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, S.; Wu, B.; Liu, M.; Chen, Z.; Wang, W.; Anderson, C.S.; Sandercock, P.; Wang, Y.; Huang, Y.; Cui, L.; et al. Stroke in china: Advances and challenges in epidemiology, pre-vention, and management. Lancet Neurol. 2019, 18, 394–405. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, H.; Zeng, X.; Yin, P.; Zhu, J.; Chen, W.; Li, X.; Wang, L.; Wang, L.; Liu, Y.; et al. Mortality, morbidity, and risk factors in China and its provinces, 1990–2017: A systematic analysis for the Global Burden of Disease Study 2017. Lancet 2019, 394, 1145–1158. [Google Scholar] [CrossRef] [PubMed]
- Paraskevas, K.I. Prevention and treatment of strokes associated with carotid artery stenosis: A research priority. Ann. Transl. Med. 2020, 8, 1260. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.-J.; Li, Z.-X.; Gu, H.-Q.; Zhai, Y.; Zhou, Q.; Jiang, Y.; Zhao, X.-Q.; Wang, Y.-L.; Yang, X.; Wang, C.-J.; et al. China Stroke Statistics: An update on the 2019 report from the National Center for Healthcare Quality Management in Neurological Diseases, China National Clinical Research Center for Neurological Diseases, the Chinese Stroke Association, National Center for Chronic and Non-communicable Disease Control and Prevention, Chinese Center for Disease Control and Prevention and Institute for Global Neuroscience and Stroke Collaborations. Stroke Vasc. Neurol. 2022, 7, 415–450. [Google Scholar] [PubMed]
- da Miao, M.; Gao, X.S.; Zhao, J.; Zhao, P. Rehabilitation robot following motion control algorithm based on human behavior intention. Appl. Intell. 2023, 53, 6324–6343. [Google Scholar] [CrossRef]
- Gittler, M.; Davis, A.M. Guidelines for adult stroke rehabilitation and recovery. JAMA 2018, 319, 820–821. [Google Scholar] [CrossRef]
- Ghonasgi, K.; Mirsky, R.; Bhargava, N.; Haith, A.M.; Stone, P.; Deshpande, A.D. Kinematic coordination captures learning during human–exoskeleton interaction. Sci. Rep. 2023, 13, 10322. [Google Scholar] [CrossRef]
- Bae, E.K.; Park, S.E.; Moon, Y.; Chun, I.T.; Choi, J. A robotic gait training system with a stair-cextremitying mode based on a unique exoskeleton structure with active foot plates. Int. J. Control Autom. Syst. 2020, 18, 196–205. [Google Scholar] [CrossRef]
- Ling, W.; Yu, G.; Li, Z. Lower extremity exercise rehabilitation assessment based on artificial intelligence and medical big data. IEEE Access 2019, 7, 126787–126798. [Google Scholar] [CrossRef]
- Yang, T.; Gao, X. Adaptive neural sliding-mode controller for alternative control strategies in lower extremity rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 28, 238–247. [Google Scholar] [CrossRef]
- Pisla, D.; Nadas, I.; Tucan, P.; Albert, S.; Carbone, G.; Antal, T.; Banica, A.; Gherman, B. Development of a control system and functional validation of a parallel robot for lower extremity rehabilitation. Actuators 2021, 10, 277. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, S.; Zhu, X.; Shen, J.; Xu, Z. Disturbance observer-based patient-cooperative control of a lower extremity rehabilitation exoskeleton. Int. J. Precis. Eng. Manuf. 2020, 21, 957–968. [Google Scholar] [CrossRef]
- He, Y.; Xu, Y.; Hai, M.; Feng, Y.; Liu, P.; Chen, Z.; Duan, W. Exoskeleton-assisted rehabilitation and neuroplasticity in spinal cord injury. World Neurosurg. 2024, 185, 45–54. [Google Scholar] [CrossRef]
- Li, K.; Zhang, J.; Wang, L.; Zhang, M.; Li, J.; Bao, S. A review of the key technologies for sEMG-based human-robot interaction systems. Biomed. Signal Process. Control 2020, 62, 102074. [Google Scholar] [CrossRef]
- Liang, C.; Hsiao, T. Admittance control of powered exoskeletons based on joint torque estimation. IEEE Access 2020, 8, 94404–94414. [Google Scholar] [CrossRef]
- Li, Z.; Huang, Z.; He, W.; Su, C.Y. Adaptive impedance control for an upper extremity robotic exoskeleton using biological signals. IEEE Trans. Ind. Electron. 2016, 64, 1664–1674. [Google Scholar] [CrossRef]
- Wang, W.; Qin, L.; Yuan, X.; Ming, X.; Sun, T.; Liu, Y. Bionic control of exoskeleton robot based on motion intention for rehabilitation training. Adv. Robot. 2019, 33, 590–601. [Google Scholar] [CrossRef]
- Foroutannia, A.; Akbarzadeh-T, M.-R.; Akbarzadeh, A.; Tahamipour-Z, S.M. Adaptive fuzzy impedance control of exoskeleton robots with electromyography-based convolutional neural networks for human intended trajectory estimation. Mechatronics 2023, 91, 102952. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, L.; Dong, F.; Zhong, M.; Pop, A.A.; Tang, M.; Vladareanu, L. Research on the method of identifying upper and lower extremity coordinated movement intentions based on surface EMG signals. Front. Bioeng. Biotechnol. 2024, 11, 1349372. [Google Scholar] [CrossRef]
- Luo, S.; Meng, Q.; Li, S.; Yu, H. Research of intent recognition in rehabilitation robots: A systematic review. Disabil. Rehabil. Assist. Technol. 2024, 19, 1307–1318. [Google Scholar] [CrossRef]
- Iqbal, N.; Khan, T.; Khan, M.; Hussain, T.; Hameed, T.; Bukhari, S.A. Neuromechanical signal-based parallel and scalable model for lower extremity movement recognition. IEEE Sensors J. 2021, 21, 16213–16221. [Google Scholar] [CrossRef]
- Li, C.; Chen, X.; Zhang, X.; Wu, D. Research on electromyography-based pattern recognition for inter-extremity coordination in human crawling motion. Front. Neurosci. 2024, 18, 1349347. [Google Scholar]
- Wang, F.; Lu, J.; Fan, Z.; Ren, C.; Geng, X. Continuous motion estimation of lower extremitys based on deep belief networks and random forest. Rev. Sci. Instruments 2022, 93, 044106. [Google Scholar] [CrossRef]
- Sun, N.; Cao, M.; Chen, Y.; Chen, Y.; Wang, J.; Wang, Q.; Chen, X.; Liu, T. Continuous estimation of human knee joint angles by fusing kinematic and myoelectric signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 2446–2455. [Google Scholar] [CrossRef]
- Zeng, M.; Gu, J.; Feng, Y. Motion Prediction Based on sEMG-Transformer for Lower Extremity Exoskeleton Robot Control. In Proceedings of the 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), Sanya, China, 8–10 July 2023; pp. 864–869. [Google Scholar]
- Wu, Q.; Chen, Y. Development of an intention-based adaptive neural cooperative control strategy for upper-extremity robotic rehabilitation. IEEE Robot. Autom. Lett. 2020, 6, 335–342. [Google Scholar] [CrossRef]
- Mehr, J.K.; Sharifi, M.; Mushahwar, V.K.; Tavakoli, M. Intelligent locomotion planning with enhanced postural stability for lower-extremity exoskeletons. IEEE Robot. Autom. Lett. 2021, 6, 7588–7595. [Google Scholar] [CrossRef]
- Khairuddin, I.M.; Sidek, S.N.; Majeed, A.P.A.; Razman, M.A.M.; Puzi, A.A.; Yusof, H.M. The classification of movement intention through machine learning models: The identification of significant time-domain EMG features. PeerJ Comput. Sci. 2021, 7, e379. [Google Scholar] [CrossRef]
- Shi, Q.; Ying, W.; Lv, L.; Xie, J. Deep reinforcement learning-based attitude motion control for humanoid robots with stability constraints. Ind. Robot Int. J. Robot. Res. Appl. 2020, 47, 335–347. [Google Scholar] [CrossRef]
- Guan, W.; Zhou, L.; Cao, Y.S. Joint motion control for lower extremity rehabilitation based on iterative learning control (ILC) algorithm. Complexity 2021, 2021, 6651495. [Google Scholar] [CrossRef]
- Hasan, S.K.; Dhingra, A.K. An adaptive controller for human lower extremity exoskeleton robot. Microsyst. Technol. 2021, 27, 2829–2846. [Google Scholar] [CrossRef]
- Kunyou, H.; Lumin, C. Research of fuzzy PID control for lower extremity wearable exoskeleton robot. In Proceedings of the 2021 4th International Conference on Intelligent Autonomous Systems (ICoIAS), Wuhan, China, 14–16 May 2021; pp. 385–389. [Google Scholar]
- Yang, Y. Improvement with fuzzy PID control method control system for flexible exoskeleton. In Proceedings of the AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2024; Volume 3144. [Google Scholar]
- Lin, C.J.; Sie, T.Y. Design and experimental characterization of an artificial neural network controller for a lower extremity robotic exoskeleton. Actuators 2023, 12, 55. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, Y.; Zheng, J.; Dong, D.; Chen, X.; Bai, L. From sensing to control of lower extremity exoskeleton: A systematic review. Annu. Rev. Control 2022, 53, 83–96. [Google Scholar] [CrossRef]
- Sun, J.; Wang, J.; Yang, P.; Zhang, Y.; Chen, L. Adaptive finite-time control for wearable exoskeletons based on ultra-local model and radial basis function neural network. Int. J. Control Autom. Syst. 2021, 19, 889–899. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Zhang, G.; Guo, S. Periodic event-triggered sliding mode control for lower extremity exoskeleton based on human-robot cooperation. ISA Trans. 2022, 123, 87–97. [Google Scholar] [CrossRef]
- Soleimani Amiri, M.; Ramli, R.; Ibrahim, M.F.; Abd Wahab, D.; Aliman, N. Adaptive particle swarm optimization of pid gain tuning for lower-extremity human exoskeleton in a virtual environment. Mathematics 2020, 8, 2040. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J. Lower extremity exoskeleton robots’ dynamics parameters identification based on improved beetle swarm optimization algorithm. Robotica 2022, 40, 2716–2731. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, S.; Wang, A.; Li, W.; Ma, Z.; Yue, X. Humanoid control of lower extremity exoskeleton robot based on human gait data with sliding mode neural network. CAAI Trans. Intell. Technol. 2022, 7, 606–616. [Google Scholar] [CrossRef]
- Sun, Z.; Qiu, J.; Zhu, J.; Li, S. A composite position control of flexible lower extremity exoskeleton based on second-order sliding mode. Nonlinear Dyn. 2023, 111, 1657–1666. [Google Scholar] [CrossRef]
- Kenas, F.; Saadia, N.; Ababou, A.; Ababou, N. Model-free based adaptive BackSteping-Super Twisting-RBF neural network control with α-variable for 10 DOF lower extremity exoskeleton. Int. J. Intell. Robot. Appl. 2024, 8, 122–148. [Google Scholar] [CrossRef]
- Hou, X.; Li, W.; Han, Y.; Wang, A.; Yang, Y.; Liu, L.; Tian, Y. A novel mobile robot navigation method based on hand-drawn paths. IEEE Sensors J. 2020, 20, 11660–11673. [Google Scholar] [CrossRef]
- Quan, H.; Li, Y.; Zhang, Y. A novel mobile robot navigation method based on deep reinforcement learning. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420921672. [Google Scholar] [CrossRef]
- Efstathiou, D.; Chalvatzaki, G.; Dometios, A.; Spiliopoulos, D.; Tzafestas, C.S. Deep leg tracking by detection and gait analysis in 2D range data for intelligent robotic assistants. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 2657–2662. [Google Scholar]
- Wang, F.; Zhang, C.; Zhang, W.; Fang, C.; Xia, Y.; Liu, Y.; Dong, H. Object-based reliable visual navigation for mobile robot. Sensors 2022, 22, 2387. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Gao, X.; Miao, M.; Zhao, P. Design and control of a lower limb rehabilitation robot based on human motion intention recognition with multi-source sensor information. Machines 2022, 10, 1125. [Google Scholar] [CrossRef]
- Zhao, L.; Cao, N.; Yang, H. Forecasting regional short-term freight volume using QPSO-LSTM algorithm from the perspective of the importance of spatial information. Math. Biosci. Eng. 2023, 20, 2609–2627. [Google Scholar] [CrossRef]
- Xiang, Z.; Yan, J.; Demir, I. A rainfall-runoff model with LSTM-based sequence-to-sequence learning. Water Resour. Res. 2020, 56, e2019WR025326. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A review of recurrent neural networks: LSTM cells and network architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Pirani, M.; Thakkar, P.; Jivrani, P.; Bohara, M.H.; Garg, D. A comparative analysis of ARIMA, GRU, LSTM and BiLSTM on financial time series forecasting. In Proceedings of the 2022 IEEE International Conference on Distributed Computing and Electrical Circuits and Electronics (ICDCECE), Ballari, India, 23–24 April 2022; pp. 1–6. [Google Scholar]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The performance of LSTM and BiLSTM in forecasting time series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar]
- Chu, Y.; Fei, J.; Hou, S. Adaptive global sliding-mode control for dynamic systems using double hidden layer recurrent neural network structure. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1297–1309. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Solver | Maximum Number of Iterations | Gradient Threshold | Initial Learning Rate | Learning Rate Reduction Cycle | Learning Rate Decline Factor |
|---|---|---|---|---|---|
| Adam optimizer | 88 | 1 | 0.005 | 65 | 0.1 |
| Hip | Knee | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Subject1 | BiLSTM | 0.5803 | 58.86% | 0.7689 | 0.9468 | 0.5155 | 12.06% | 0.8099 | 0.9786 |
| PSO-BiLSTM | 0.5204 | 46.95% | 0.6542 | 0.9615 | 0.6916 | 55.46% | 0.9583 | 0.9701 | |
| QPSO-BiLSTM | 0.3152 | 16.79% | 0.3891 | 0.9864 | 0.1564 | 4.36% | 0.2806 | 0.9974 | |
| Subject2 | BiLSTM | 0.5606 | 39.35% | 0.8904 | 0.9699 | 0.2238 | 36.22% | 0.2955 | 0.9810 |
| PSO-BiLSTM | 0.7565 | 43.59% | 0.9015 | 0.9691 | 0.1599 | 35.98% | 0.2123 | 0.9902 | |
| QPSO-BiLSTM | 0.4759 | 38.35% | 0.7233 | 0.9801 | 0.0495 | 8.15% | 0.0808 | 0.9986 | |
| Subject3 | BiLSTM | 1.7713 | 53.32% | 2.4841 | 0.9785 | 0.2668 | 21.44% | 0.3516 | 0.9890 |
| PSO-BiLSTM | 1.7151 | 37.20% | 2.5195 | 0.9779 | 0.3621 | 27.00% | 0.4260 | 0.9839 | |
| QPSO-BiLSTM | 0.9908 | 33.64% | 1.1992 | 0.9950 | 0.1810 | 8.82% | 0.2492 | 0.9945 | |
| Subject4 | BiLSTM | 0.4783 | 1.78% | 0.7041 | 0.9684 | 0.4709 | 6.28% | 0.6583 | 0.9048 |
| PSO-BiLSTM | 0.3645 | 1.44% | 0.4820 | 0.9852 | 0.4444 | 6.13% | 0.5679 | 0.9291 | |
| QPSO-BiLSTM | 0.2251 | 0.87% | 0.3595 | 0.9920 | 0.4643 | 6.38% | 0.5447 | 0.9348 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.; Zhao, P.; Wu, X.; Yang, R.; Gao, X. An Active Control Method for a Lower Limb Rehabilitation Robot with Human Motion Intention Recognition. Sensors 2025, 25, 713. https://doi.org/10.3390/s25030713
Song Z, Zhao P, Wu X, Yang R, Gao X. An Active Control Method for a Lower Limb Rehabilitation Robot with Human Motion Intention Recognition. Sensors. 2025; 25(3):713. https://doi.org/10.3390/s25030713
Chicago/Turabian StyleSong, Zhuangqun, Peng Zhao, Xueji Wu, Rong Yang, and Xueshan Gao. 2025. "An Active Control Method for a Lower Limb Rehabilitation Robot with Human Motion Intention Recognition" Sensors 25, no. 3: 713. https://doi.org/10.3390/s25030713
APA StyleSong, Z., Zhao, P., Wu, X., Yang, R., & Gao, X. (2025). An Active Control Method for a Lower Limb Rehabilitation Robot with Human Motion Intention Recognition. Sensors, 25(3), 713. https://doi.org/10.3390/s25030713