
Simulation Analysis of the Semi-Trailer Steered Wheels Control Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
The Role of Ultrasonic Sensors and Image Processing in Investigating a Vehicle Towing a Trailer
2. Method
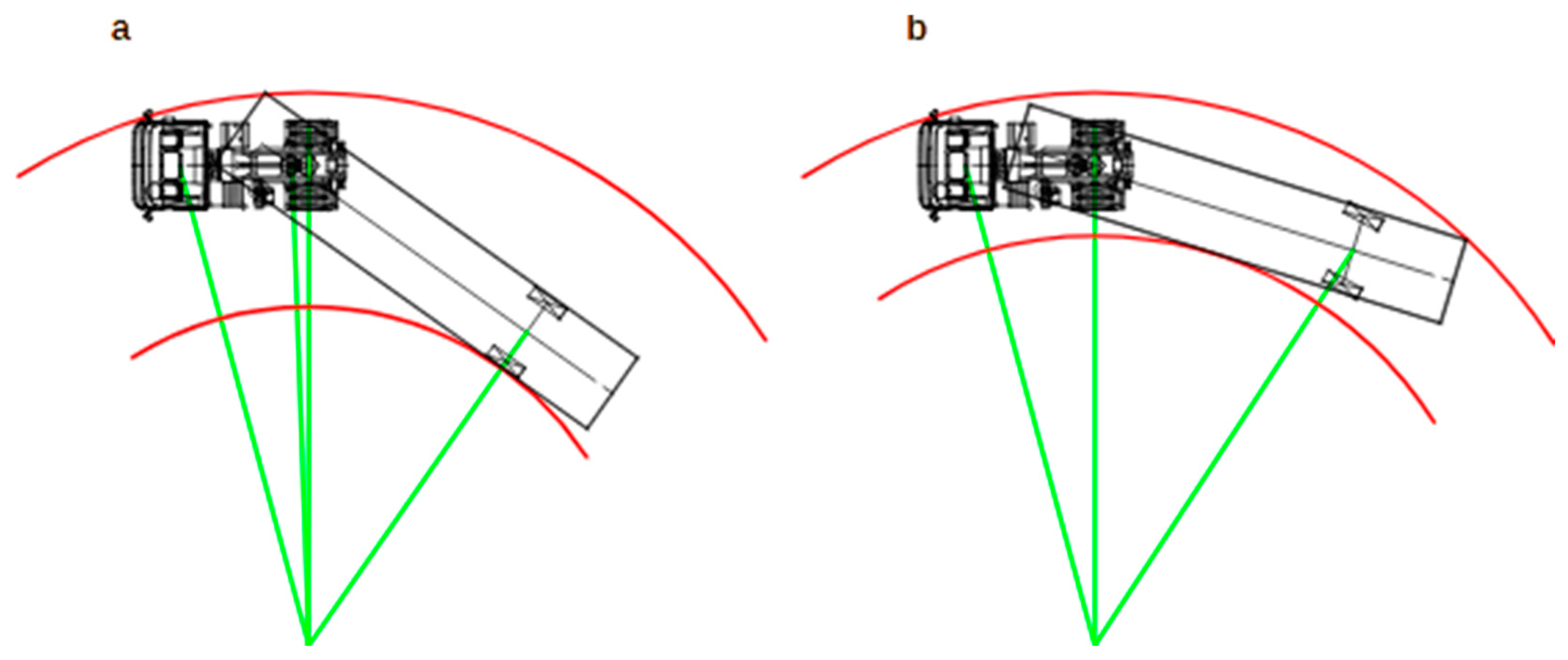
2.1. Analysis
- l12—tractor wheelbase,
- a1C—distance from the rear axle of the tractor to the front of the tractor,
- xS—distance from the rear axle of the tractor to the center of the coupling (fifth wheel),
- bC—tractor width,
- lN—distance from the rear of the semi-trailer to the center of the coupling (fifth wheel),
- lS—distance from the centerline of the semi-trailer to the center of the coupling (fifth wheel),
- bN—width of a semi-trailer.
- O—turning center of the tractor and, in the case of stationary movement, of the whole combination vehicle,
- M—center of rear axle of the tractor,
- S—center of the coupling (fifth wheel),
- C—the outermost point of the tractor outside the track; replacing the silhouette of the tractor in the plan view with a rectangle, this is the front outer corner of the tractor,
- T—point lying on the longitudinal axis of the semi-trailer on its rear outline,
- K—center of semi-trailer axle,
- N—the outermost point of the semi-trailer on the track; replacing the silhouette of the semi-trailer in the horizontal projection with a rectangle, this is the rear external corner of the semi-trailer.
2.2. Assumptions Used for the Calculations
- wheelbase: l12 = 5.0 m,
- width: bc = 2.55 m,
- distance from rear axle to front of tractor: a1c = 6.50 m,
- distance from rear axle to fifth wheel: xs = 0.5 m and semi-trailer data:
- -
- distance from coupling pin to rear outline: ln = 15.0 m,
- -
- width: bn = 2.55 m,
- -
- rear overhang: a2n = 3.0 m, so the distance from the fifth wheel to the rear axle ls = ln—3.0 m = 12.0 m
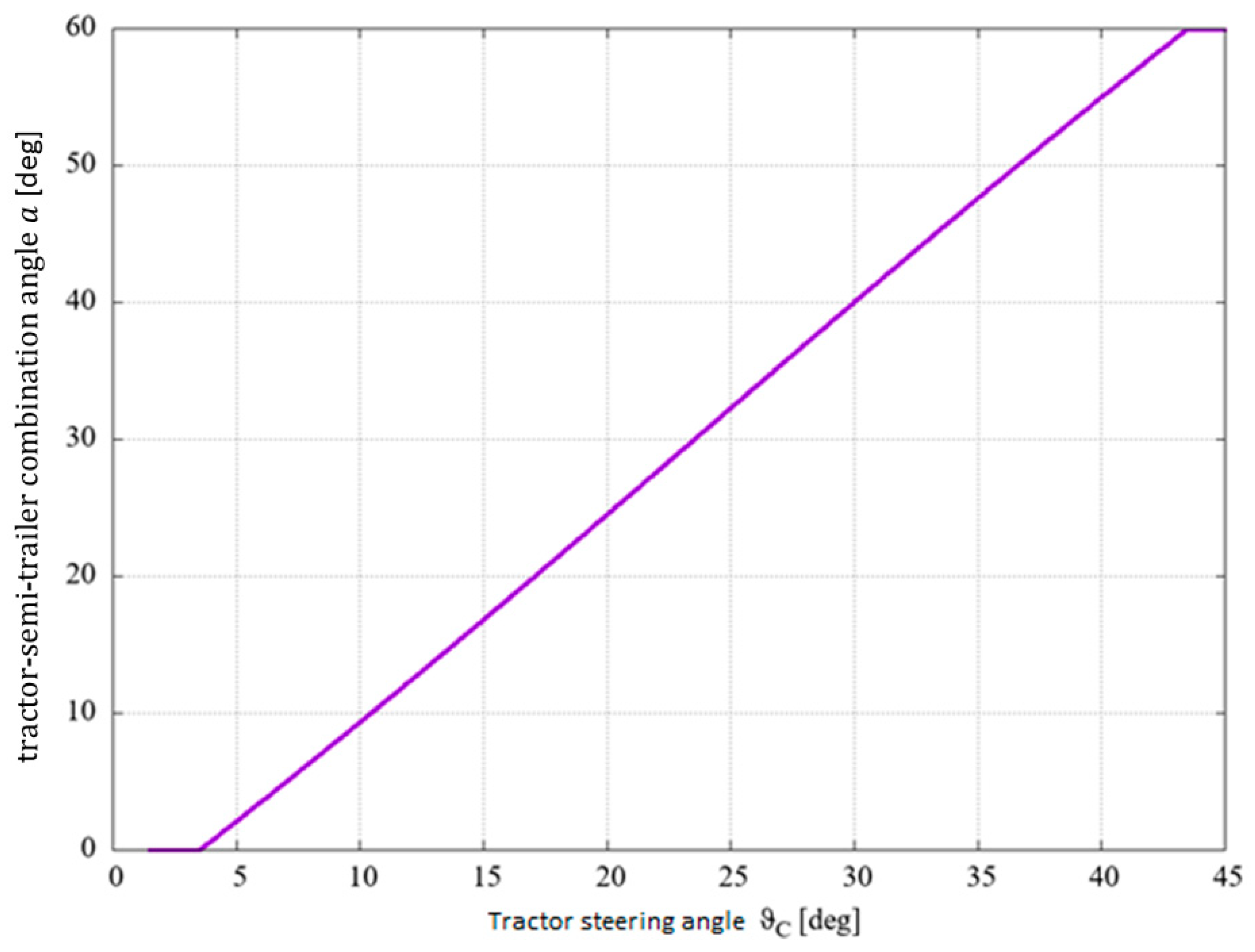
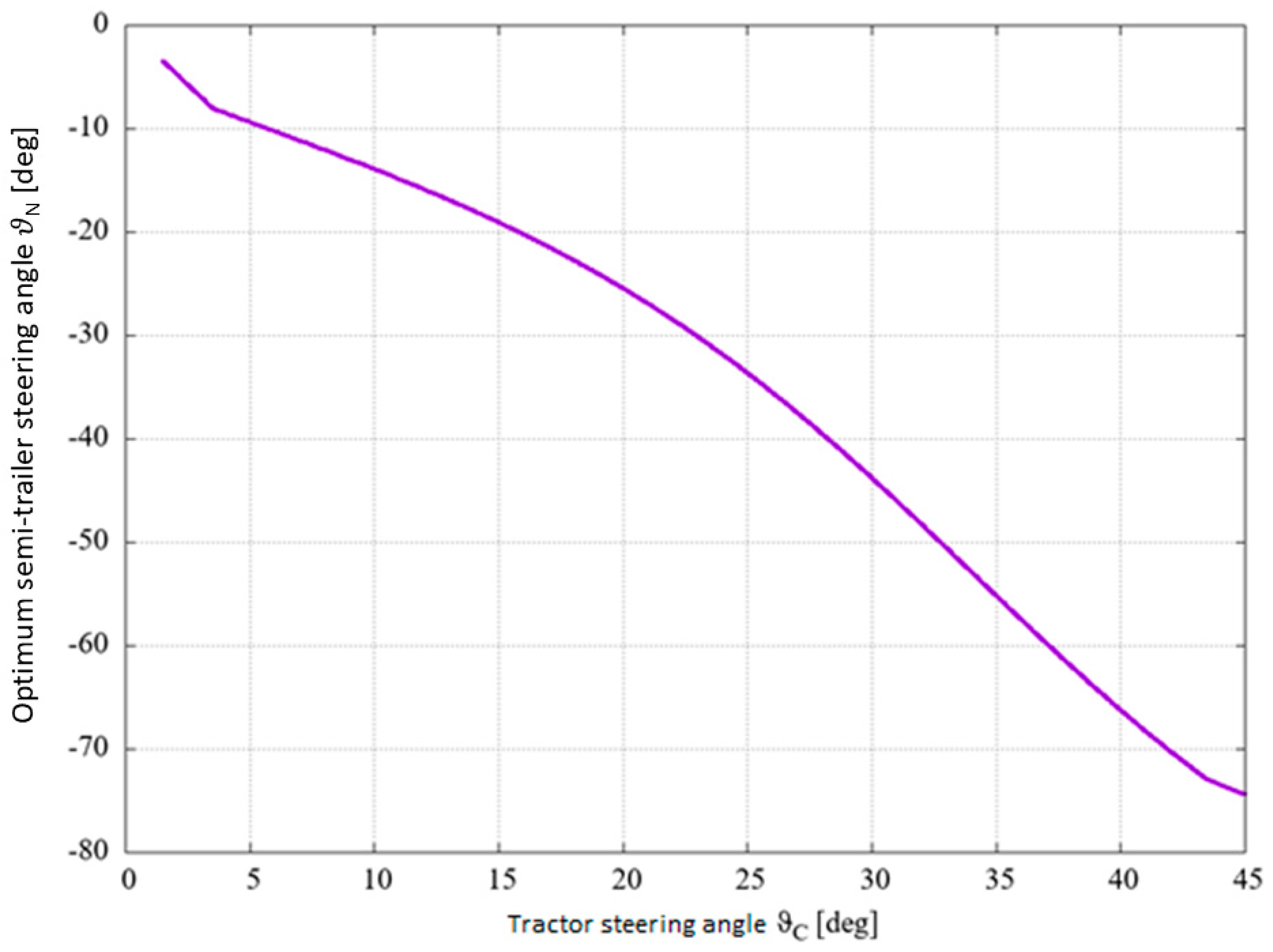
2.3. Results
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ustawa z dnia 20 Czerwca 1997 r.—Prawo o Ruchu Drogowym. Dziennik Ustaw 1997 nr 98 poz. 602 (Law on Road Traffic. Act of 20 June 1997. Journal of Laws. 1997 no. 98 Item 602). Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU19970980602 (accessed on 29 August 2024). (In Polish)
- Ustawa z dnia 21 Marca 1985 r. o Drogach Publicznych. Dziennik Ustaw 1985 nr 14 poz. 60 (On Public Roads. Act of 21 March 1985. Journal of Laws. 1985 no. 14). Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU19850140060 (accessed on 29 August 2024). (In Polish)
- Pajka, A.; Gera, G. System BDF jako mobilny magazyn w zarządzaniu przesyłkami kurierskimi. Ekon. I Organ. Logistyki 2018, 3, 63–72. [Google Scholar] [CrossRef]
- Xu, J.; Wu, H.; Zhao, R.; Li, G. Implementation of Interconnection Communication in ECPB In-Loop Testing System for Semi-Trailer Vehicles. Appl. Sci. 2024, 14, 5897. [Google Scholar] [CrossRef]
- Jagelčák, J.; Kubáňová, J. Risks of Goods Transport Focused on the Assessment of Semi-Trailer Dynamics on Highways for Cargo Securing. Appl. Sci. 2024, 14, 3846. [Google Scholar] [CrossRef]
- Wang, W.; Li, G.; Liu, S. Research on Trajectory Tracking Control of a Semi-Trailer Train Based on Differential Braking. World Electr. Veh. J. 2024, 15, 30. [Google Scholar] [CrossRef]
- Czarnuch, A.; Stembalski, M.; Szydłowski, T.; Batory, D. Analysis of the Correctness of Mapping the Passage of a Semi-Trailer through a Road Obstacle on a Road Simulator. Sensors 2023, 23, 8225. [Google Scholar] [CrossRef] [PubMed]
- Radzajewski, P.; Guzek, M. Assessment of the Impact of Selected Parameters of Tractor-Semitrailer Set on the Braking Safety Indicators. Appl. Sci. 2023, 13, 5336. [Google Scholar] [CrossRef]
- Zuska, A.; Kurczyński, D.; Jackowski, J.T. Study of Loads Acting on the Load during the Sudden Braking of a Vehicle. Appl. Sci. 2023, 13, 1559. [Google Scholar] [CrossRef]
- Li, G.; Fu, T.; Zhao, R. Research on Yaw Stability Control Method of Liquid Tank Semi-Trailer on Low-Adhesion Road under Turning Condition. Appl. Sci. 2023, 13, 39. [Google Scholar] [CrossRef]
- Lozia, Z. Application of Modelling and Simulation in Durability Tests of Vehicles and Their Components. Energies 2022, 15, 9398. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, L.; Shan, H.; Zhang, M. Evaluation of Braking Timing Sequence of Semi-Trailer Train Based on Fuzzy Analytic Hierarchy Process. Appl. Sci. 2022, 12, 12605. [Google Scholar] [CrossRef]
- Cai, H.; Xu, X. Lateral Stability Control of a Tractor-Semitrailer at High Speed. Machines 2022, 10, 716. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, J.; Wang, N.; Wang, Y.; Song, Y.; Li, X. Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision. Sustainability 2022, 14, 9805. [Google Scholar] [CrossRef]
- Ha, D.V.; Tan, V.V.; Niem, V.T.; Sename, O. Evaluation of Dynamic Load Reduction for a Tractor Semi-Trailer Using the Air Suspension System at all Axles of the Semi-Trailer. Actuators 2022, 11, 12. [Google Scholar] [CrossRef]
- Ilić, V.; Lukić, M.; Gavran, D.; Fric, S.; Trpčevski, F.; Vranjevac, S.; Milovanović, N. Exact Mathematical Solution for Maximum Transient Offtracking Calculation of a Single-Unit Vehicle Negotiating Circular Curves. Appl. Sci. 2024, 14, 5570. [Google Scholar] [CrossRef]
- Sołowczuk, A.B.; Benedysiuk, W. Design of Turbo-Roundabouts Based on the Rules of Vehicle Movement Geometry on Curvilinear Approaches. Sustainability 2023, 15, 13882. [Google Scholar] [CrossRef]
- Čudina Ivančev, A.; Ahac, M.; Ahac, S.; Dragčević, V. Comparison of Single-Lane Roundabout Entry Degree of Saturation Estimations from Analytical and Regression Models. Algorithms 2023, 16, 164. [Google Scholar] [CrossRef]
- Ciampa, D.; Olita, S. Mountain Roads’ Geometric Design: Methodological Proposal for Hairpin Bend Design/Retrofitting. Infrastructures 2022, 7, 112. [Google Scholar] [CrossRef]
- Ahac, S.; Dragčević, V. Geometric Design of Suburban Roundabouts. Encyclopedia 2021, 1, 720–743. [Google Scholar] [CrossRef]
- Marchuk, R.; Sakhno, V.; Murovanyi, I.; Razboinikov, O.; Bosenko, V.; Marchuk, N. To determine the maneuverability of three-link road trains type “B-triple” with steered axles of semi-trailers dollies. Arch. Automot. Eng.–Arch. Motoryz. 2024, 104, 97–111. [Google Scholar] [CrossRef]
- De Bernardis, M.; Rini, G.; Bottiglione, F.; Hartavi, A.E.; Sorniotti, A. On nonlinear model predictive direct yaw moment control for trailer sway mitigation. Veh. Syst. Dyn. 2022, 61, 445–471. [Google Scholar] [CrossRef]
- Vejlupek, J. Trailer Backing-up Assistant using ultrasound sensors based control units to safely back-up the car with trailer. In Proceedings of the 17th International Conference on Mechatronics—Mechatronika, Prague, Czech Republic, 7–9 December 2016. [Google Scholar]
- Ahmadi, J.H.; Ghaffari, A. Nonlinear estimator design based on extended Kalman filter approach for state estimation of articulated heavy vehicle. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 233, 254–265. [Google Scholar] [CrossRef]
- Xu, L.; Tseng, E.; Pilutti, T.; Schondorf, S. Yaw Rate Based Trailer Hitch Angle Estimation for Trailer Backup Assist. SAE Technical Paper. 27 January 2017. Available online: https://www.sae.org/publications/technical-papers/content/2017-01-0027/ (accessed on 5 November 2024).
- Manav, A.C.; Lazoglu, I. A Novel Cascade Path Planning Algorithm for Autonomous Truck-Trailer Parking. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6821–6835. [Google Scholar] [CrossRef]
- Kowalski, M.; Bogdanowicz, P.; Jura, J. Komputerowa analiza przepływu powietrza na powierzchni karoserii samochodowej. Studia Technica II. 2008. Available online: http://hdl.handle.net/11716/7268 (accessed on 29 August 2024). (In Polish).
- Cholewiński, S.; Łączyński, J.; Olejnik, K. Badania drogowe i symulacyjne przedłużonego zestawu pojazdów ciągnik siodłowy-naczepa. Autobusy Tech. Eksploat. Syst. Transp. 2016, 17, 876–880. (In Polish) [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abramowski, M.; Fundowicz, P.; Sar, H.; Reński, A.; Brukalski, M. Simulation Analysis of the Semi-Trailer Steered Wheels Control Algorithm. Sensors 2025, 25, 626. https://doi.org/10.3390/s25030626
Abramowski M, Fundowicz P, Sar H, Reński A, Brukalski M. Simulation Analysis of the Semi-Trailer Steered Wheels Control Algorithm. Sensors. 2025; 25(3):626. https://doi.org/10.3390/s25030626
Chicago/Turabian StyleAbramowski, Michał, Piotr Fundowicz, Hubert Sar, Andrzej Reński, and Mateusz Brukalski. 2025. "Simulation Analysis of the Semi-Trailer Steered Wheels Control Algorithm" Sensors 25, no. 3: 626. https://doi.org/10.3390/s25030626
APA StyleAbramowski, M., Fundowicz, P., Sar, H., Reński, A., & Brukalski, M. (2025). Simulation Analysis of the Semi-Trailer Steered Wheels Control Algorithm. Sensors, 25(3), 626. https://doi.org/10.3390/s25030626