
Establishment and Evaluation of Atmospheric Water Vapor Inversion Model Without Meteorological Parameters Based on Machine Learning


Abstract
1. Introduction
2. Methods and Dataset
2.1. PWV Inversion-Based GNSS
2.2. PWV Calculation by Integral Method
2.3. Establishment of a New Model for Water Vapor Inversion Based on Deep Learning
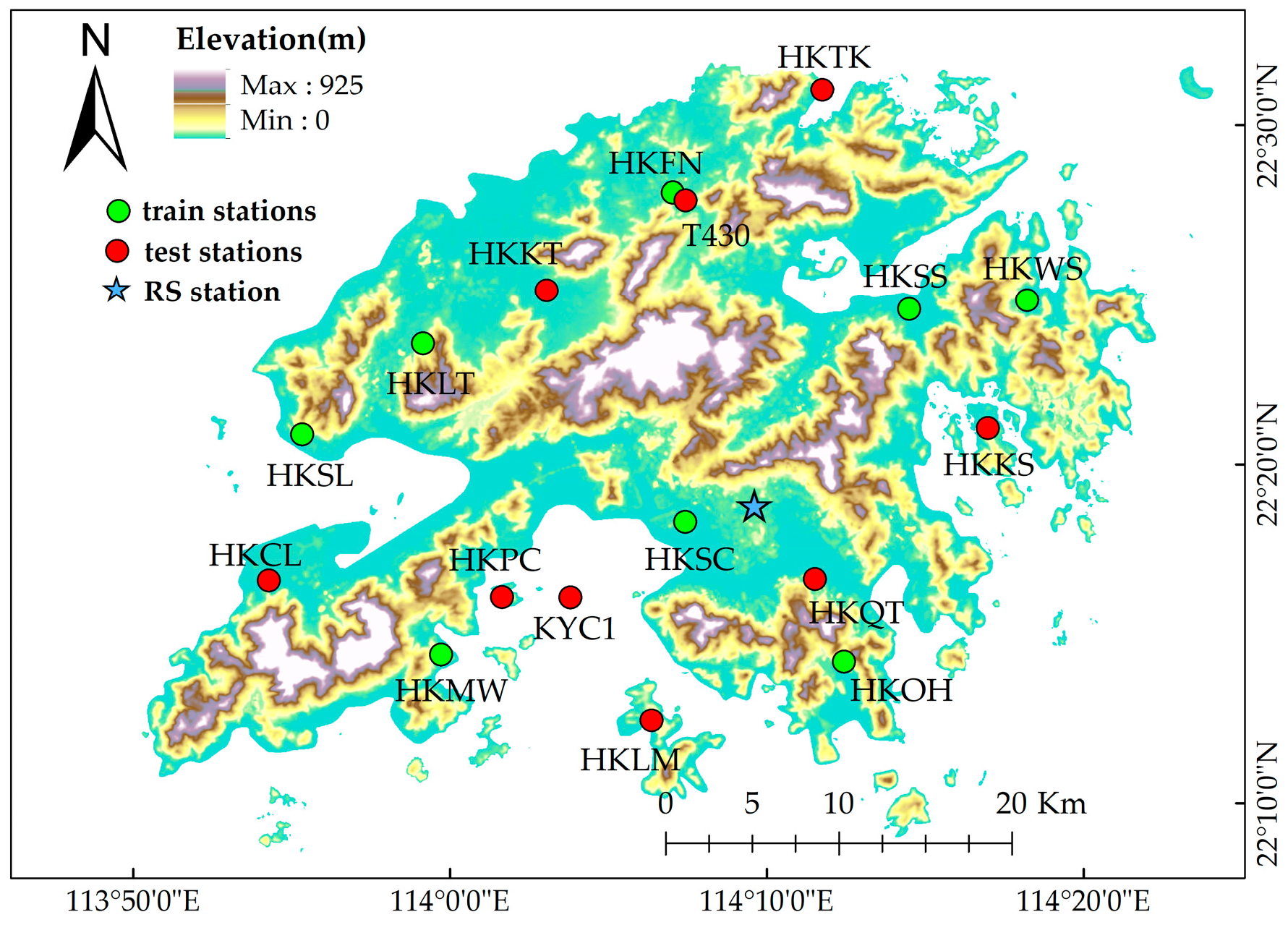
2.4. Datasets
2.4.1. ERA5 Data
2.4.2. GNSS Data
2.4.3. Radiosonde Data
2.4.4. GSMaP Data
3. Experimental Results and Analysis
3.1. Feasibility and Accuracy Analysis of the RF_PWV Model
3.2. Reliability Analysis of the RF_PWV Model
4. Analysis of Water Vapor Inversion and Temporal and Spatial Variation Characteristics of Rainstorm
4.1. Water Vapor Inversion Based on the RF_PWV Model and Its Time Series Analysis
4.2. The Spatial and Temporal Characteristics of PWV Inverted by the RF_PWV Model
5. Conclusions
- (1)
- When ERA5 data are used as the reference value, the water vapor accuracy indexes BIAS, MAE, and RMSE of the new model RF_PWV inversion proposed in this paper are 0.2 mm, 0.8 mm and 1.1 mm, respectively. Compared with the traditional method, the inversion accuracy index value of RF_PWV is increased by 38% on average. When the sounding station data are used as the reference value, the accuracies of the new model and the LSTM model are equivalent, and the accuracy index is within 1 mm. However, under the same conditions, the RF model has a simple structure and is easy to implement, which can effectively avoid the error accumulation caused by the algorithm.
- (2)
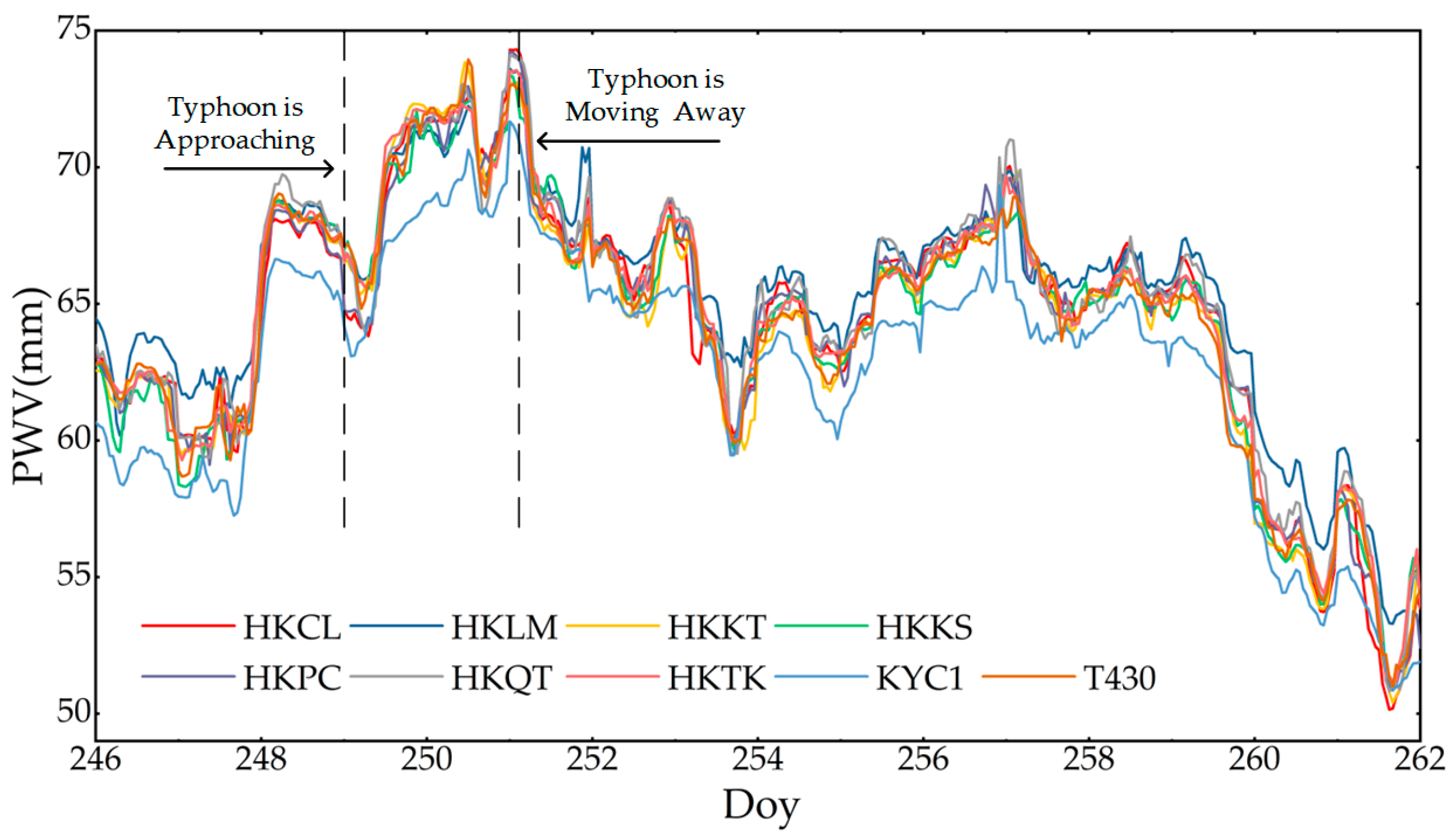
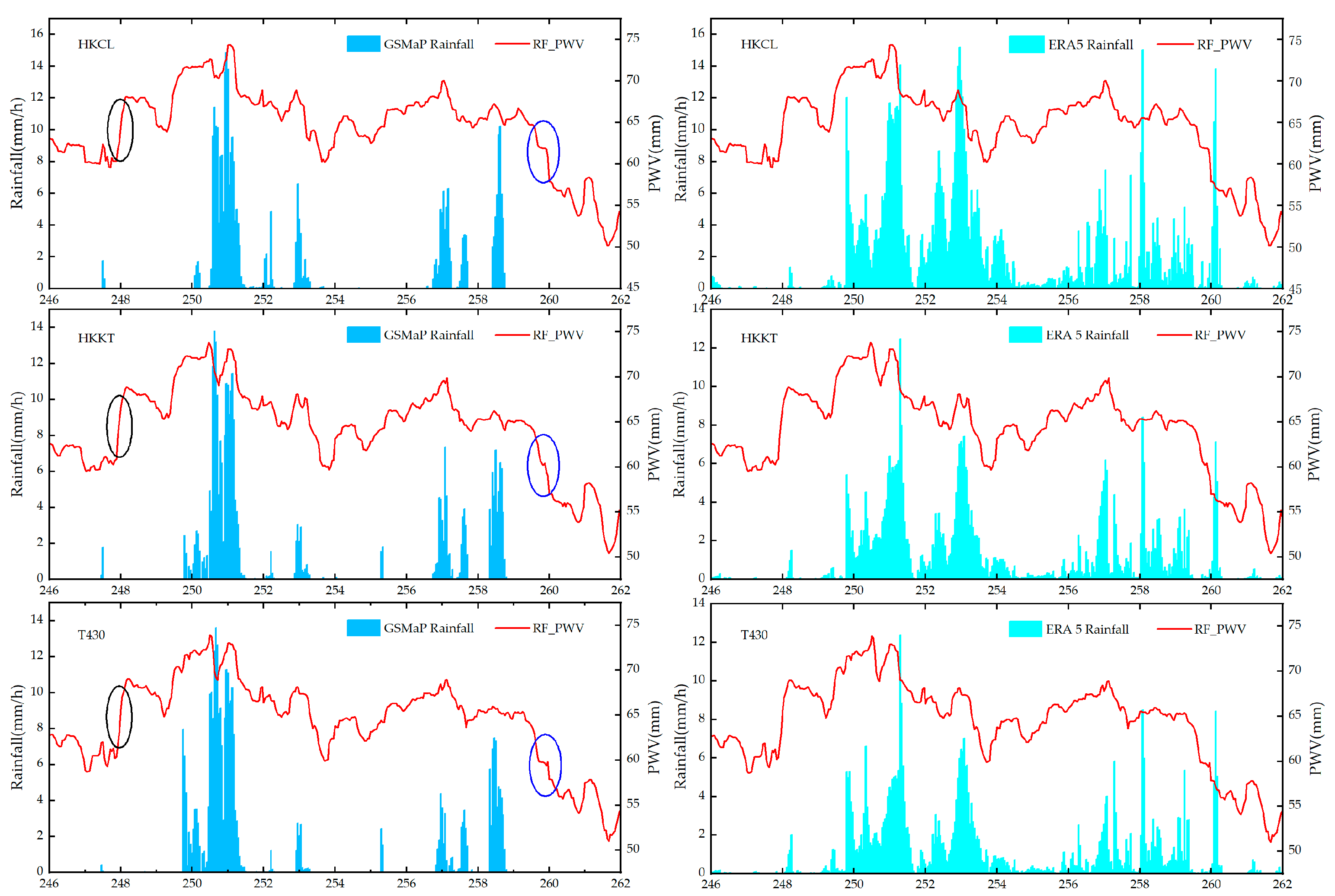
- In response to the rainstorm event caused by Typhoon Haikui, the ERA5 and GSMaP rainfall products are used to analyze the water vapor time series inverted by the RF_PWV model. The results show that with the residual typhoon landing in Hong Kong, the PWV time series obtained by the RF_PWV model shows a continuous upward trend before the rainfall event, and then the PWV time series gradually decreases after the rainfall event. The whole PWV time series can better respond to the rainstorm event.
- (3)
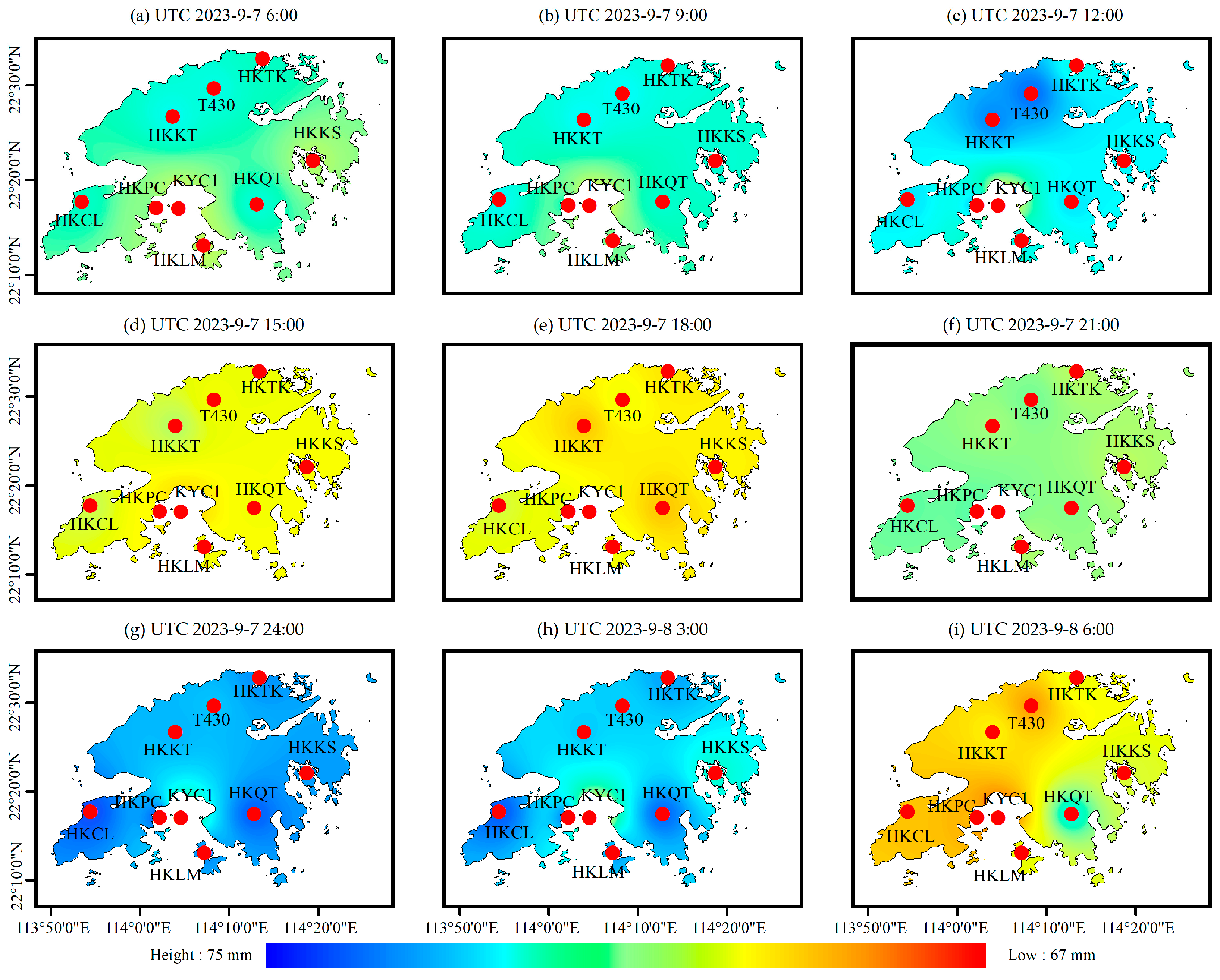
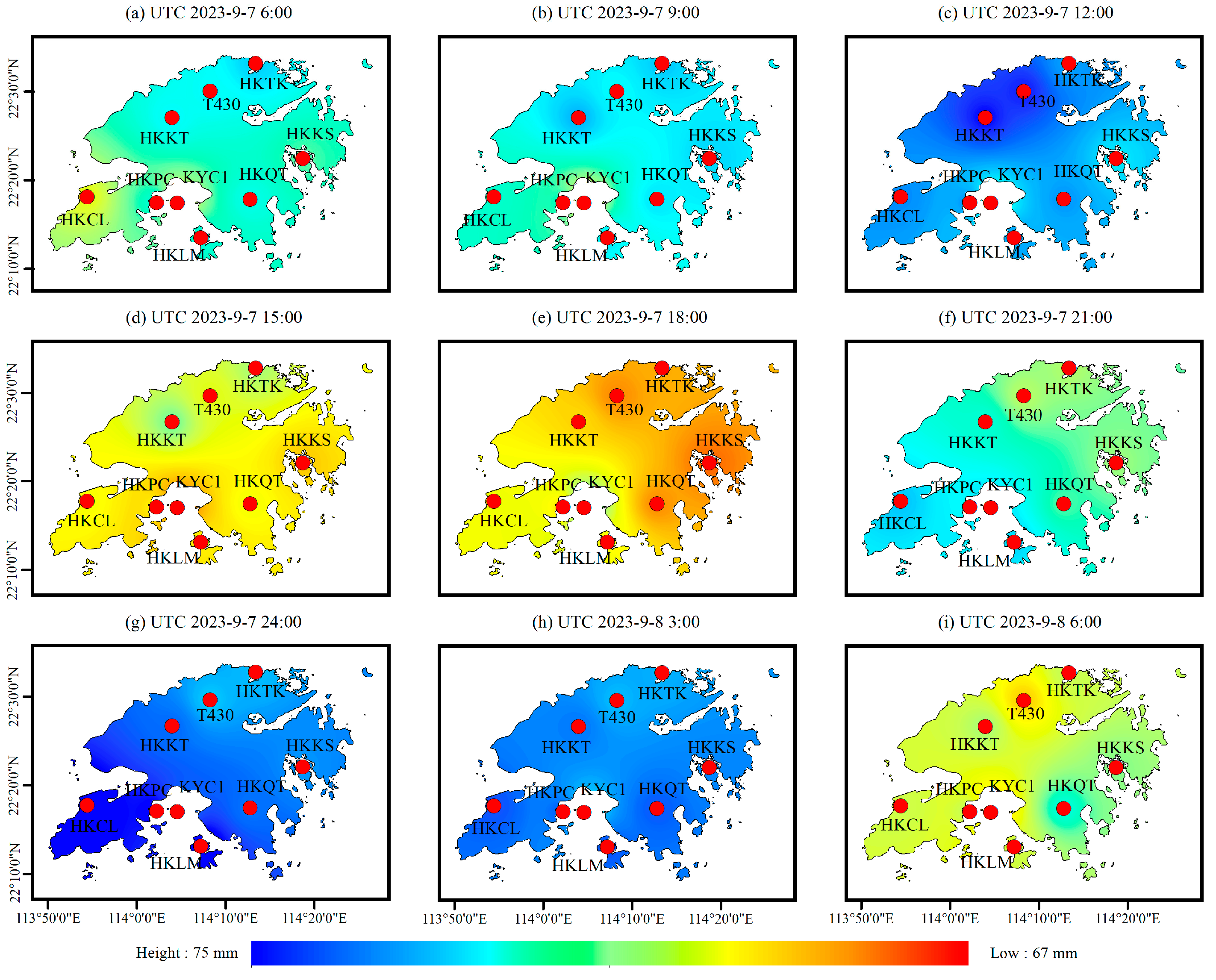
- By analyzing the spatial and temporal distribution results of the PWV retrieved by the RF_PWV model, it can be seen that with the occurrence of rainstorm events, the spatial and temporal variations in the PWV show a corresponding rising and falling phenomenon, and when the actual rainfall reaches the peak, the spatio-temporal information of the PWV also corresponds to the peak value of the whole region. At the same time, the spatio-temporal distribution of the PWV inverted by the RF_PWV model is consistent with the trend in water vapor obtained by ERA5, which verifies the reliability of the water vapor retrieved from the RF_PWV model.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, A.; Xu, Y.; Jiang, N.; Wu, Y.; Gao, Z.; Li, S.; Xu, T.; Bastos, L. Analyzing correlations between GNSS retrieved precipitable water vapor and land surface temperature after earthquakes occurrence. Sci. Total Environ. 2023, 872, 162225. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.H.; Zhang, L.Y.; Dai, A.G.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. Atmos. 2007, 112, D11107. [Google Scholar] [CrossRef]
- Fontaine, B.; Roucou, P.; Trzaska, S. Atmospheric water cycle and moisture fluxes in the West African monsoon: Mean annual cycles and relationship using NCEP/NCAR reanalysis. Geophys. Res. Lett. 2003, 30, 1117. [Google Scholar] [CrossRef]
- Elgered, G.; Johansson, J.M.; Rönnäng, B.O. Measuring regional atmospheric water vapor using the Swedish permanent GPS network. Geophys. Res. Lett. 1997, 24, 2663–2666. [Google Scholar] [CrossRef]
- Ke, F.Y.; Zhao, P.; Yu, W.; Hong, G.; Tian, J.N.; Ming, L.L. Response of Meiyu process considering the temporal and spatial characteristics of GNSS PWV. Theor. Appl. Climatol. 2024, 155, 1301–1319. [Google Scholar] [CrossRef]
- Zhao, X.W.; Niu, Q.; Chi, Q.; Chen, J.; Liu, C. A new LSTM-based model to determine the atmospheric weighted mean temperature in GNSS PWV retrieval. GPS Solut. 2024, 28, 74. [Google Scholar] [CrossRef]
- Wu, F.; Li, D.; Zhao, J.; Jiang, H.; Luo, X. SDIPPWV: A novel hybrid prediction model based on stepwise decomposition-integration-prediction avoids future information leakage to predict precipitable water vapor from GNSS observations. Sci. Total Environ. 2024, 933, 173116. [Google Scholar] [CrossRef]
- Alshawaf, F.; Fuhrmann, T.; Knopfler, A.; Luo, X.; Mayer, M.; Hinz, S.; Heck, B. Accurate Estimation of Atmospheric Water Vapor Using GNSS Observations and Surface Meteorological Data. IEEE Trans. Geosci. Remote 2015, 53, 3764–3771. [Google Scholar] [CrossRef]
- Shoji, Y.; Nakamura, H.; Aonashi, K.; Ichiki, A.; Seko, H. Semi-Diurnal and Diurnal Variation of Errors in GPS Precipitable Water Vapor at Tsukuba, Japan Caused by Site Displacement Due to Ocean Tidal Loading; Terra: Tokyo, Japan, 2000; Volume 52, pp. 685–690. [Google Scholar]
- Li, L.; Wang, X.; Wei, Y.; Wang, H. The New PWV Conversion Models Based on GNSS and Meteorological Elements in the China Region. Atmosphere 2022, 13, 1810. [Google Scholar] [CrossRef]
- Jiang, C.H.; Chen, S.N.; Wang, S.M.; Gao, X.; Zhu, H.Z.; Lu, Y.Y.; Liu, G.S. A grid model of direct conversion between zenith tropospheric delay and precipitable water vapor in tropical regions. GPS Solut. 2024, 28, 127. [Google Scholar] [CrossRef]
- Huang, Y.; Wei, G.; Ren, R. Improved BP neural network model for prediction of atmospheric precipitable water vaImproved BP neural network model for prediction of atmospheric precipitable water vapor. J. Navig. Position 2020, 110, 63–67. [Google Scholar]
- Xie, S.; Su, Y.; Wang, X.; Fang, F.; Liang, C.; Xing, Y. Prediction of GPS precipitable water based on generatic wavelet neural network. China Sci. Paper 2018, 13, 1041–1044. [Google Scholar]
- Huang, L.K.; Mo, Z.X.; Xie, S.F.; Liu, L.L.; Chen, J.; Kang, C.L.; Wang, S.T. Spatiotemporal characteristics of GNSS-derived precipitable water vapor during heavy rainfall events in Guilin, China. Satell. Navig. 2021, 2, 13. [Google Scholar] [CrossRef]
- Srivastava, A. Estimation of GPS-based atmospheric precipitable water vapour over Dehradun. J. Earth Syst. Sci. 2021, 130, 173. [Google Scholar] [CrossRef]
- Geng, J.H.; Chen, X.Y.; Pan, Y.X.; Mao, S.Y.; Li, C.H.; Zhou, J.N.; Zhang, K.L. PRIDE PPP-AR: An open-source software for GPS PPP ambiguity resolution. GPS Solut. 2019, 23, 91. [Google Scholar] [CrossRef]
- Huang, L.K.; Jiang, W.P.; Liu, L.L.; Chen, H.; Ye, S.R. A new global grid model for the determination of atmospheric weighted mean temperature in GPS precipitable water vapor. J. Geod. 2019, 93, 159–176. [Google Scholar] [CrossRef]
- Zhao, Q.Z.; Yao, Y.B.; Yao, W.Q. GPS-based PWV for precipitation forecasting and its application to a typhoon event. J. Atmos. Sol. Terr. Phys. 2018, 167, 124–133. [Google Scholar] [CrossRef]
- Huang, L.K.; Liu, W.; Mo, Z.X.; Zhang, H.X.; Li, J.Y.; Chen, F.D.; Liu, L.L.; Jiang, W.P. A new model for vertical adjustment of precipitable water vapor with consideration of the time-varying lapse rate. GPS Solut. 2023, 27, 170. [Google Scholar] [CrossRef]
- Wu, H.C.; Yang, Q.L.; Liu, J.M.; Wang, G.Q. A spatiotemporal deep fusion model for merging satellite and gauge precipitation in China. J. Hydrol. 2020, 584, 124664. [Google Scholar] [CrossRef]
- Srivastava, A. Application of GPS PWV for rainfall detection using ERA5 datasets over the Indian IGS locations. J. Earth Syst. Sci. 2024, 133, 60. [Google Scholar] [CrossRef]
- Pang, H.Y.; Zhang, L.L.; Liu, W.; Wang, X.; Wang, Y.F.; Huang, L.K. A GRNN-Based Model for ERA5 PWV Adjustment with GNSS Observations Considering Seasonal and Geographic Variations. Remote Sens. 2024, 16, 2424. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, L.L.; Xiong, S.; Huang, L.K.; Xie, S.F.; Liu, L.L. Investigating the ERA5-Based PWV Products and Identifying the Monsoon Active and Break Spells with Dense GNSS Sites in Guangxi, China. Remote Sens. 2023, 15, 4710. [Google Scholar] [CrossRef]
- Elbeltagi, A.; Pande, C.B.; Kumar, M.; Tolche, A.D.; Singh, S.K.; Kumar, A.; Vishwakarma, D.K. Prediction of meteorological drought and standardized precipitation index based on the random forest (RF), random tree (RT), and Gaussian process regression (GPR) models. Environ. Sci. Pollut. Res. Int. 2023, 30, 43183–43202. [Google Scholar] [CrossRef]
- Shah, N.H.; Priamvada, A.; Shukla, B.P. Random forest-based nowcast model for rainfall. Earth Sci. Inform. 2023, 16, 2391–2403. [Google Scholar] [CrossRef]
- Zhao, Q.Z.; Du, Z.; Li, Z.F.; Yao, W.Q.; Yao, Y.B. Two-Step Precipitable Water Vapor Fusion Method. IEEE Trans. Geosci. Remote 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Beck, H.E.; Pan, M.; Roy, T.; Weedon, G.P.; Pappenberger, F.; Dijk, A.I.J.M.; Huffman, G.J.; Adler, R.F.; Wood, E.F. Daily evaluation of 26 precipitation datasets using Stage-IV gauge-radar data for the CONUS. Hydrol. Earth Syst. Sci. 2019, 23, 207–224. [Google Scholar] [CrossRef]
- Zhang, W.X.; Lou, Y.D.; Haase, J.S.; Zhang, R.; Zheng, G.; Huang, J.F.; Shi, C.; Liu, J.N. The Use of Ground-Based GPS Precipitable Water Measurements over China to Assess Radiosonde and ERA-Interim Moisture Trends and Errors from 1999 to 2015. J. Clim. 2017, 30, 7643–7667. [Google Scholar] [CrossRef]
- Wang, J.H.; Zhang, L.Y. Systematic Errors in Global Radiosonde Precipitable Water Data from Comparisons with Ground-Based GPS Measurements. J. Clim. 2008, 21, 2218–2238. [Google Scholar] [CrossRef]
- Pang, Z.H.; Zhang, Y.; Shi, C.X.; Gu, J.X.; Yang, Q.J.; Pan, Y.; Wang, Z.; Xu, B. A Comprehensive Assessment of Multiple High-Resolution Precipitation Grid Products for Monitoring Heavy Rainfall during the “7.20” Extreme Rainstorm Event in China. Remote Sens. 2023, 15, 5255. [Google Scholar] [CrossRef]
- Yao, Y.; Shan, L.; Zhao, Q. Establishing a method of short-term rainfall forecasting based on GNSS-derived PWV and its application. Sci. Rep. 2017, 7, 12465. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | GNSS_PWV | RF_PWV |
|---|---|---|
| Max Residual | 11.2 | 6.2 |
| BIAS | 0.6 | 0.2 |
| MAE | 1.7 | 0.8 |
| RMSE | 2.2 | 1.1 |
| Value | P_PWV | RF_PWV | LSTM_Model |
|---|---|---|---|
| BIAS | 1.5 | 0.8 | 0.8 |
| MAE | 1.6 | 1.0 | 1.1 |
| RMSE | 1.7 | 1.2 | 1.2 |
| Rainfall Events at Corresponding GNSS Station | PWV (mm) | Interval (h) | Rate of Variation (mm/h) | ||
|---|---|---|---|---|---|
| Max | Min | Variation Value | |||
| HKCL | 68.1 | 59.6 | 8.5 | 12 | 0.7 |
| HKKT | 68.9 | 60.4 | 8.5 | 11 | 0.8 |
| T430 | 69.1 | 59.6 | 9.5 | 12 | 0.8 |
| Rainfall Events at Corresponding GNSS Station | PWV (mm) | Interval (h) | Rate of Variation (mm/h) | ||
|---|---|---|---|---|---|
| Max | Min | Variation Value | |||
| HKCL | 66.2 | 56.0 | 10.2 | 16 | 0.6 |
| HKKT | 65.2 | 56.9 | 8.3 | 16 | 0.5 |
| T430 | 65.3 | 55.7 | 9.6 | 16 | 0.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Shen, Y.; Zhang, S.; Zhu, X. Establishment and Evaluation of Atmospheric Water Vapor Inversion Model Without Meteorological Parameters Based on Machine Learning. Sensors 2025, 25, 420. https://doi.org/10.3390/s25020420
Liu N, Shen Y, Zhang S, Zhu X. Establishment and Evaluation of Atmospheric Water Vapor Inversion Model Without Meteorological Parameters Based on Machine Learning. Sensors. 2025; 25(2):420. https://doi.org/10.3390/s25020420
Chicago/Turabian StyleLiu, Ning, Yu Shen, Shuangcheng Zhang, and Xuejian Zhu. 2025. "Establishment and Evaluation of Atmospheric Water Vapor Inversion Model Without Meteorological Parameters Based on Machine Learning" Sensors 25, no. 2: 420. https://doi.org/10.3390/s25020420
APA StyleLiu, N., Shen, Y., Zhang, S., & Zhu, X. (2025). Establishment and Evaluation of Atmospheric Water Vapor Inversion Model Without Meteorological Parameters Based on Machine Learning. Sensors, 25(2), 420. https://doi.org/10.3390/s25020420