A Novel Particle Filter Based on One-Step Smoothing for Nonlinear Systems with Random One-Step Delay and Missing Measurements


Abstract
1. Introduction
2. Nonlinear Systems with Random One-Step Delay and Missing Measurements
- When , , it means that the sensor successfully obtains useful information.
- When and , , it means that the sensor experiences a one-step delay.
- When and , , it means that the sensor measurement is missing.
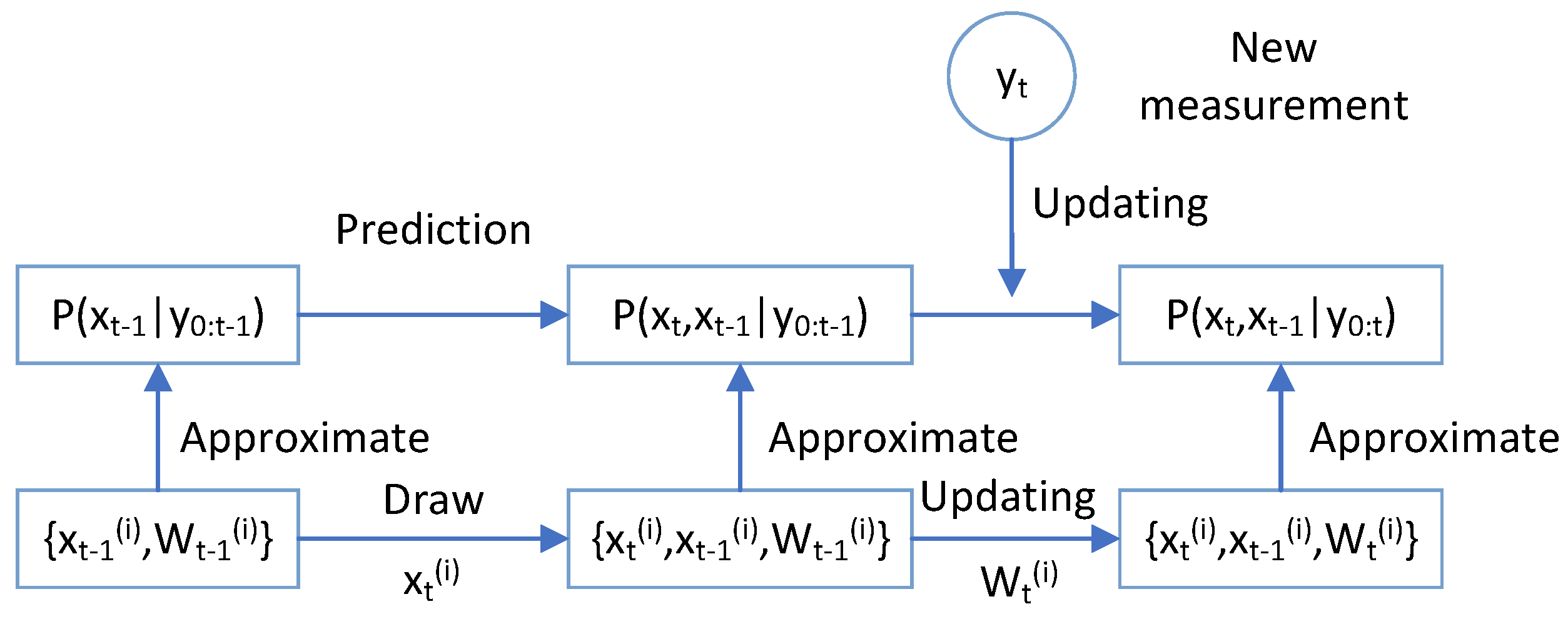
3. One-Step Particle Smoother
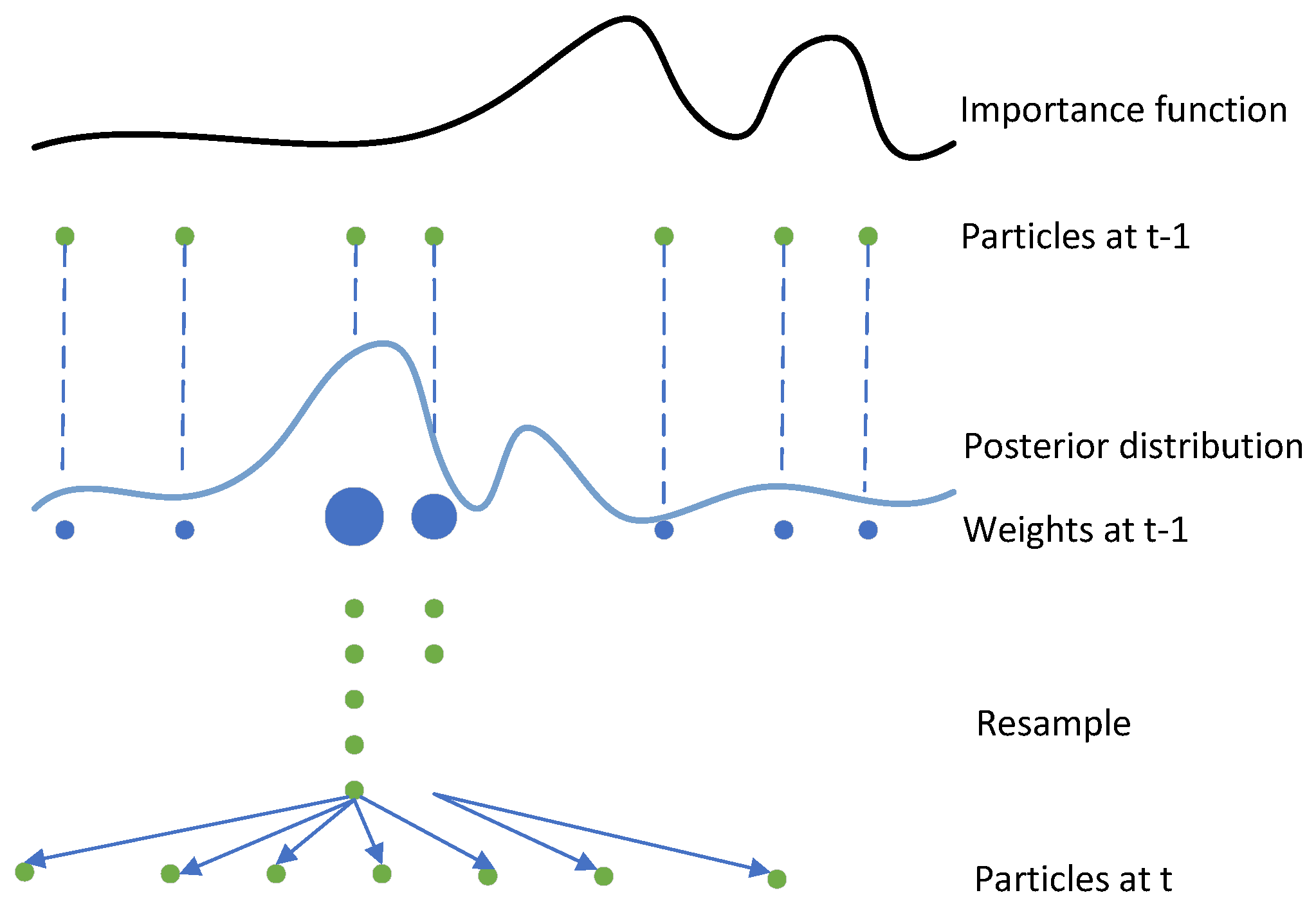
3.1. Weighted Sample Approximation with Importance Sampling Theory
3.2. One-Step Smoothing for Weighted Samples
4. A Novel Particle Filter Based on One-Step Smoothing for Nonlinear System with Random One-Step Delay and Missing Measurements
4.1. A Novel Particle Filter Based on One-Step Smoothing
- Iteration initialization. Denote the one-step particle smoother by as the initial iteration, where .
- Obtain sample from .
- Compute by Equation (14).
- Denote .
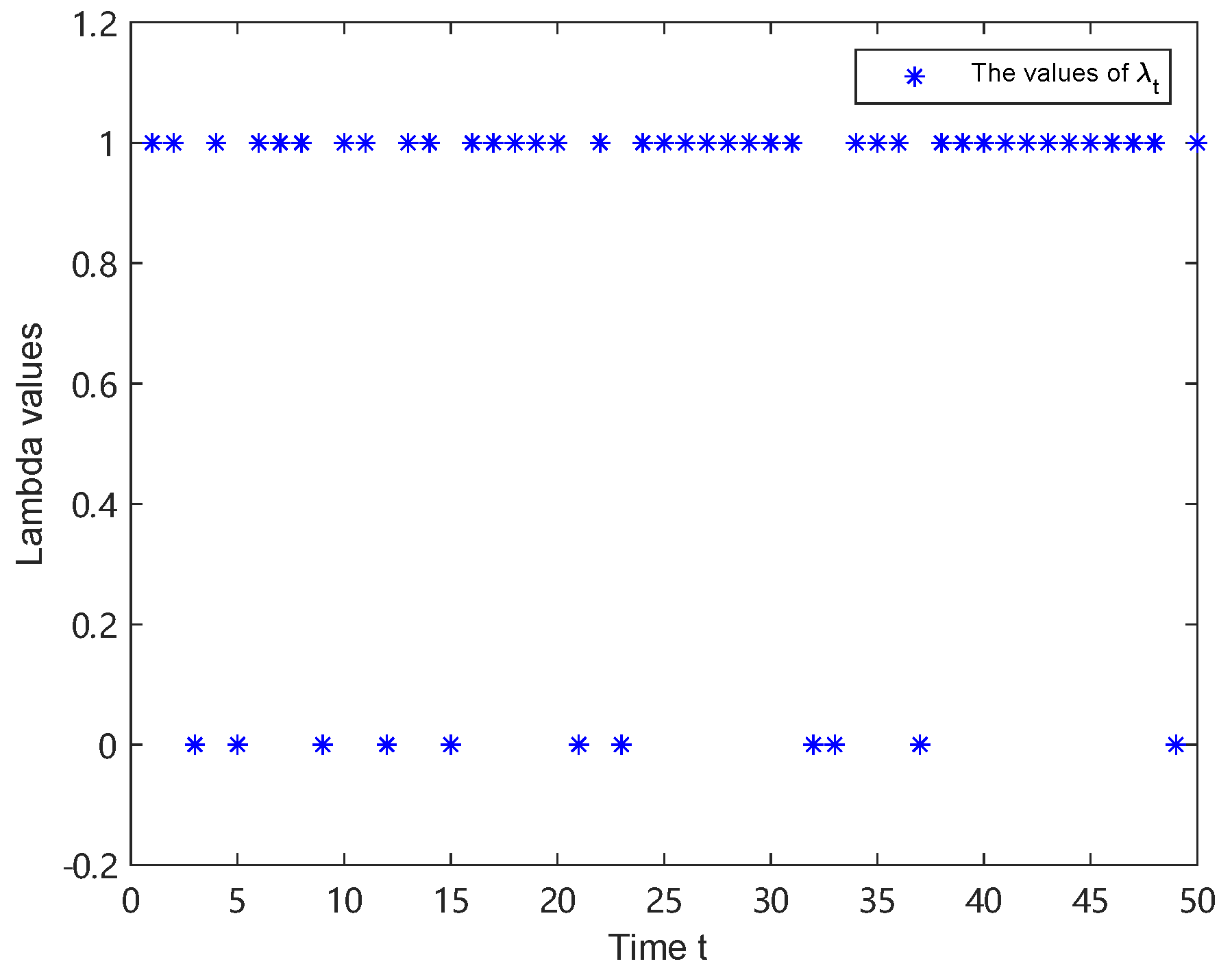
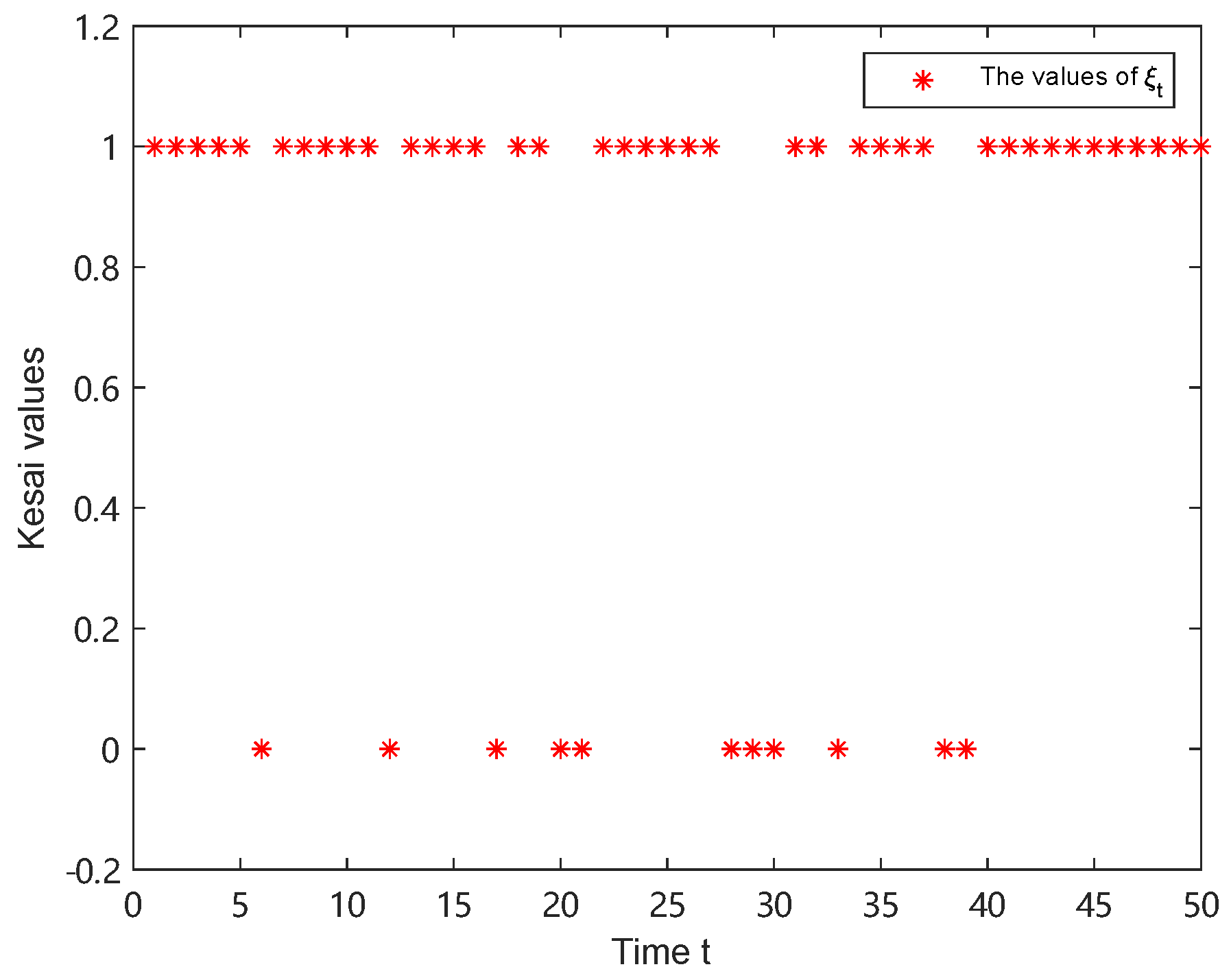
- Stop the iteration when the specified stopping criterion is satisfied. The stopping condition is the threshold which is the distance between the measurements and the observations predicted values.
4.2. Algorithm
| Algorithm 1 A novel particle filter with random one-step delay and MM. |
| Step I. Initialization: |
| Draw state particles from prior . |
| The weight of all particles is |
| For |
| Step II. Repeat the following 1–9 steps: |
| 1. Obtain new sample by dynamic model (1). |
| . |
| 2. Obtain new sample by dynamic model (1). |
| . |
| 3. Calculate the observation predicted value by Equation (18). |
| 4. Calculate the the distance between the measurements and the observations’ predicted values. |
| . |
| 5. Judge whether the distances are larger than the threshold value. |
| For |
| If |
| else |
| Return to the step 1–5. |
| 6. Evaluate importance weights by Equation (14). |
| 7. Normalize importance weights: |
| . |
| 8. Resample, i.e., |
| Resample . |
| 9. Compute the state estimation, |
| . |
| The end. |
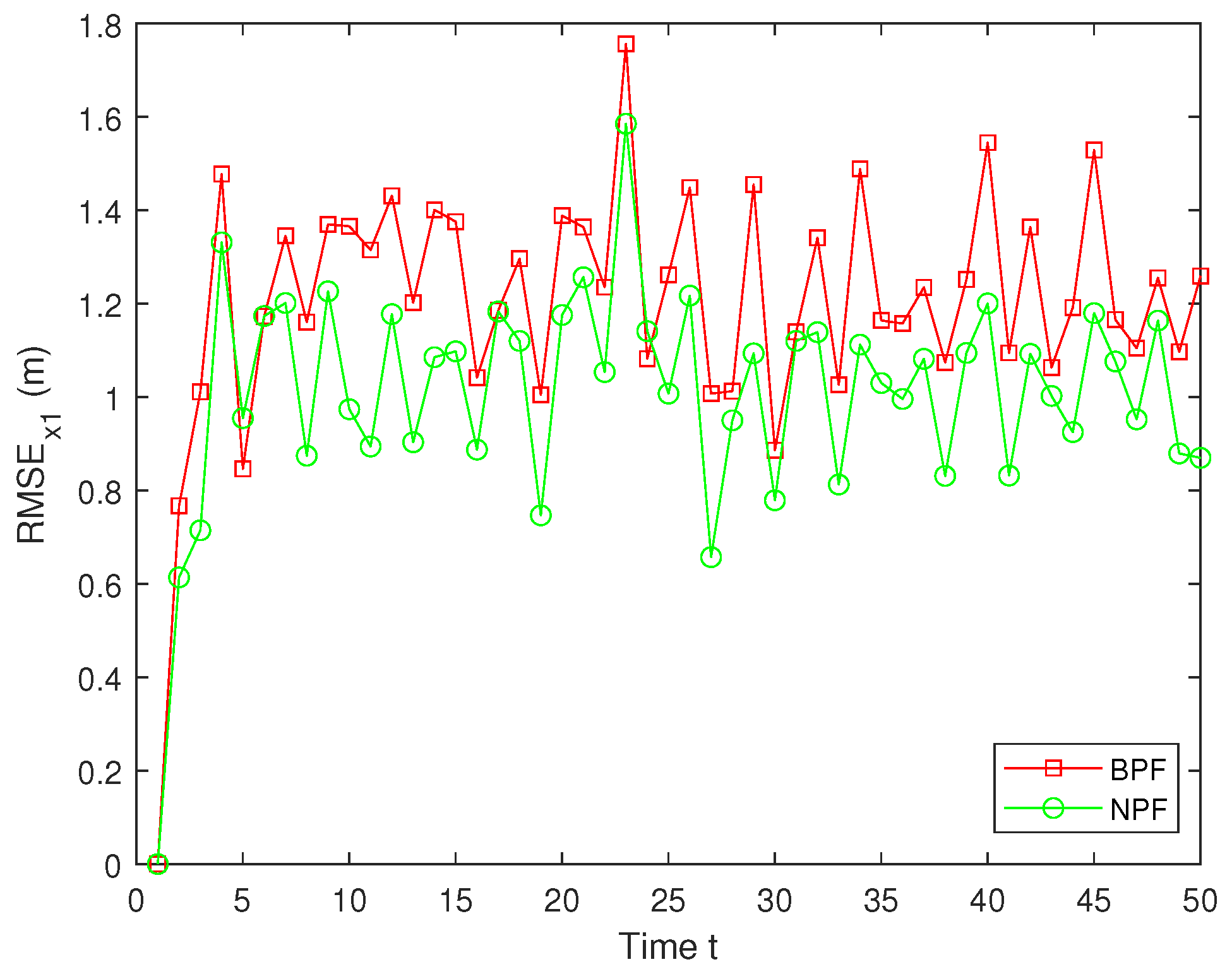
5. Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation With Applications to Tracking and Navigation: Theory Algorithms and Software; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Dhanya, M.; Chandrasekar, A. Improved Rainfall Simulation by Assimilating Oceansat-2 Surface Winds Using Ensemble Kalman Filter for a Heavy Rainfall Event over South India. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7721–7726. [Google Scholar] [CrossRef]
- Djuric, P.M.; Kotecha, J.H.; Zhang, J.; Huang, Y.; Ghirmai, T.; Bugallo, M.F. Particle Filtering. IEEE Signal Process. Mag. 2003, 20, 19–38. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, Y.; Leng, J.; Wang, Z. SCGTracker: Spatio-temporal Correlation and Graph Neural Networks for Multiple Object Tracking. Pattern Recognit. 2024, 149, 110249. [Google Scholar] [CrossRef]
- Knobbe, E.J.; Buckingham, B. The Extended Kalman Filter for Continuous Glucose Monitoring. Diabetes Technol. Ther. 2005, 7, 15–27. [Google Scholar] [CrossRef]
- Zou, S.; Zhao, W.; Liang, W.; Wang, C.; Chen, F. Fault Diagnosis and Fault-Tolerant Compensation Strategy for Wheel Angle Sensor of Steer-by-Wire Vehicle via Extended Kalman Filter. IEEE Sens. J. 2022, 22, 1756–1766. [Google Scholar] [CrossRef]
- Sadik, Z.A.; Date, P.M.; Mitra, G. Forecasting Crude oil Futures Prices Using Global Macroeconomic News Sentiment. IMA J. Manag. Math. 2020, 31, 191–215. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K. Gaussian Filters for Nonlinear Filtering Problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Xiong, K.; Zhang, H.Y.; Chan, C.W. Performance Evaluation of UKF-Based Nonlinear Filtering. Automatica 2006, 42, 261–270. [Google Scholar] [CrossRef]
- Kim, T.; Park, T.H. Extended Kalman Filter (EKF) Design for Vehicle Position Tracking Using Reliability Function of Radar and Lidar. Sensors 2020, 20, 4126. [Google Scholar] [CrossRef]
- Kandepu, R.; Foss, B.; Imsland, L. Applying the Unscented Kalman filter for Nonlinear State Estimation. J. Process Control 2008, 18, 753–768. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree Cubature Kalman Filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Pozna, C.; Precup, R.E.; Horváth, E.; Petriu, E.M. Hybrid Particle Filter–particle Swarm Optimization Algorithm and Application to Fuzzy Controlled Servo Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4286–4297. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, C.; Yang, M.H. Learning Multi-task Correlation Particle Filters for Visual Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 365–378. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J.; Ling, Q. Battery Health Prognosis using Brownian Motion Modeling and Particle Filtering. IEEE Trans. Ind. Electron. 2018, 65, 8646–8655. [Google Scholar] [CrossRef]
- Andrieu, C.; Doucet, A.; Holenstein, R. Particle Markov Chain Monte Carlo Methods. J. R. Stat. Soc. Ser. B-Stat. Methodol. 2010, 72, 269–342. [Google Scholar] [CrossRef]
- Pak, J.M.; Ahn, C.K.; Shmaliy, Y.S.; Lim, M.T. Improving Reliability of Particle Filter-Based Localization in Wireless Sensor Networks via Hybrid Particle/FIR Filtering. IEEE Trans. Ind. Inform. 2015, 11, 1089–1098. [Google Scholar] [CrossRef]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo Sampling Methods for Bayesian Filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on Particle Filters for Online Nonlinear/non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel Approach to Nonlinear/non-Gaussian Bayesian State Estimation. IEE Proc.-Radar Sonar Navig. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Da, K.; Li, T.; Zhu, Y.; Fu, Q. Gaussian Mixture Particle Jump-Markov-CPhD Fusion for Multitarget Tracking using Sensors with Limited Views. IEEE Trans. Signal Inf. Proc. Netw. 2020, 6, 605–616. [Google Scholar] [CrossRef]
- Lim, J.; Hong, D. Gaussian Particle Filtering Approach for Carrier Frequency Offset Estimation in OFDM Systems. IEEE Signal Process. Lett. 2013, 20, 367–370. [Google Scholar] [CrossRef]
- Úbeda Medina, L.; García-Fernández, A.F.; Grajal, J. Adaptive Auxiliary Particle Filter for Track-before-detect with Multiple targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2317–2330. [Google Scholar] [CrossRef]
- Sadegh Moghadasi, S.; Faraji, N. An Efficient Target Tracking Algorithm based on Particle Filter and Genetic Algorithm. IEEE Trans. Aerosp. Electron. Syst. 2019, 32, 915–923. [Google Scholar] [CrossRef]
- Tian, M.; Chen, Z.; Wang, H.; Liu, L. An Intelligent Particle Filter for Infrared dim Small Target Detection and Tracking. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5318–5333. [Google Scholar] [CrossRef]
- Wang, Z.; Dong, H.; Shen, B.; Gao, H. Finite-Horizon Filtering With Missing Measurements and Quantization Effects. IEEE Trans. Aerosp. Electron. Syst. 2013, 58, 1707–1718. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Gao, H. Recursive Filtering with Random Parameter Matrices, Multiple Fading Measurements and Correlated Noises. Automatica 2013, 49, 3440–3448. [Google Scholar] [CrossRef]
- Chang, B.; Zhao, G.; Chen, Z.; Li, L.; Imran, M.A. Packet-Drop Design in URLLC for Real-Time Wireless Control Systems. IEEE Access 2019, 7, 183081–183090. [Google Scholar] [CrossRef]
- Robinson, C.L.; Kumar, P.R. Optimizing controller location in networked control systems with packet drops. IEEE J. Sel. Areas Commun. 2008, 26, 661–671. [Google Scholar] [CrossRef]
- Hou, N.; Dong, H.; Wang, Z.; Ren, W.; Alsaadi, F.E. Non-fragile State Estimation for Discrete Markovian Jumping Neural Networks. Neurocomputing 2016, 179, 238–245. [Google Scholar] [CrossRef]
- Yuan, Y.; Yuan, H.; Guo, L.; Yang, H.; Sun, S. Resilient Control of Networked Control System Under DoS Attacks: A Unified Game Approach. IEEE Trans. Ind. Inform. 2016, 12, 1786–1794. [Google Scholar] [CrossRef]
- Chen, D.; Xu, L.; Du, J. Optimal Filtering for Systems with Finite-step Autocorrelated Process Noises, Random One-step Sensor Delay and Missing Measurements. Commun. Nonlinear Sci. Numer. Simul. 2016, 32, 211–224. [Google Scholar] [CrossRef]
- Song, X.; Duan, Z.; Park, J.H. Linear Optimal Estimation for Discrete-time Systems with Measurement-Delay and Packet Dropping. Appl. Math. Comput. 2016, 284, 115–124. [Google Scholar] [CrossRef]
- Naik, A.K.; Kumar, G.; Upadhyay, P.K.; Date, P.; Singh, A.K. Gaussian Filtering for Simultaneously Occurring Delayed and Missing Measurements. IEEE Access 2022, 10, 100746–100762. [Google Scholar] [CrossRef]
- Xu, L.; Ma, K.; Li, W.; Liu, Y.; Alsaadi, F.E. Particle Filtering for Networked Nonlinear Systems Subject to Random One-step Sensor Delay and Missing Measurements. Neurocomputing 2018, 275, 2162–2169. [Google Scholar] [CrossRef]
- Liu, J.S.; Chen, R. Sequential Monte Carlo Methods for Dynamic Systems. J. Am. Stat. Assoc. 1998, 93, 1032–1044. [Google Scholar] [CrossRef]
- Yan, Z.; Yuan, Y. Particle filter based on one-step smoothing with adaptive iteration. IET Signal Process. 2017, 11, 596–603. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filters | RMSEs of | RMSEs of | Time (s) |
|---|---|---|---|
| BPF | 1.2263 | 1.1190 | 0.0117 |
| NPF | 1.0409 | 0.7790 | 0.0341 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, X.; Xiang, W.; Lin, X. A Novel Particle Filter Based on One-Step Smoothing for Nonlinear Systems with Random One-Step Delay and Missing Measurements. Sensors 2025, 25, 318. https://doi.org/10.3390/s25020318
Yang Z, Zhang X, Xiang W, Lin X. A Novel Particle Filter Based on One-Step Smoothing for Nonlinear Systems with Random One-Step Delay and Missing Measurements. Sensors. 2025; 25(2):318. https://doi.org/10.3390/s25020318
Chicago/Turabian StyleYang, Zhenrong, Xing Zhang, Wenqian Xiang, and Xiaohui Lin. 2025. "A Novel Particle Filter Based on One-Step Smoothing for Nonlinear Systems with Random One-Step Delay and Missing Measurements" Sensors 25, no. 2: 318. https://doi.org/10.3390/s25020318
APA StyleYang, Z., Zhang, X., Xiang, W., & Lin, X. (2025). A Novel Particle Filter Based on One-Step Smoothing for Nonlinear Systems with Random One-Step Delay and Missing Measurements. Sensors, 25(2), 318. https://doi.org/10.3390/s25020318