
Airborne-Platform-Assisted Transmission and Control Separation for Multiple Access in Integrated Satellite–Terrestrial Networks
Abstract
1. Introduction
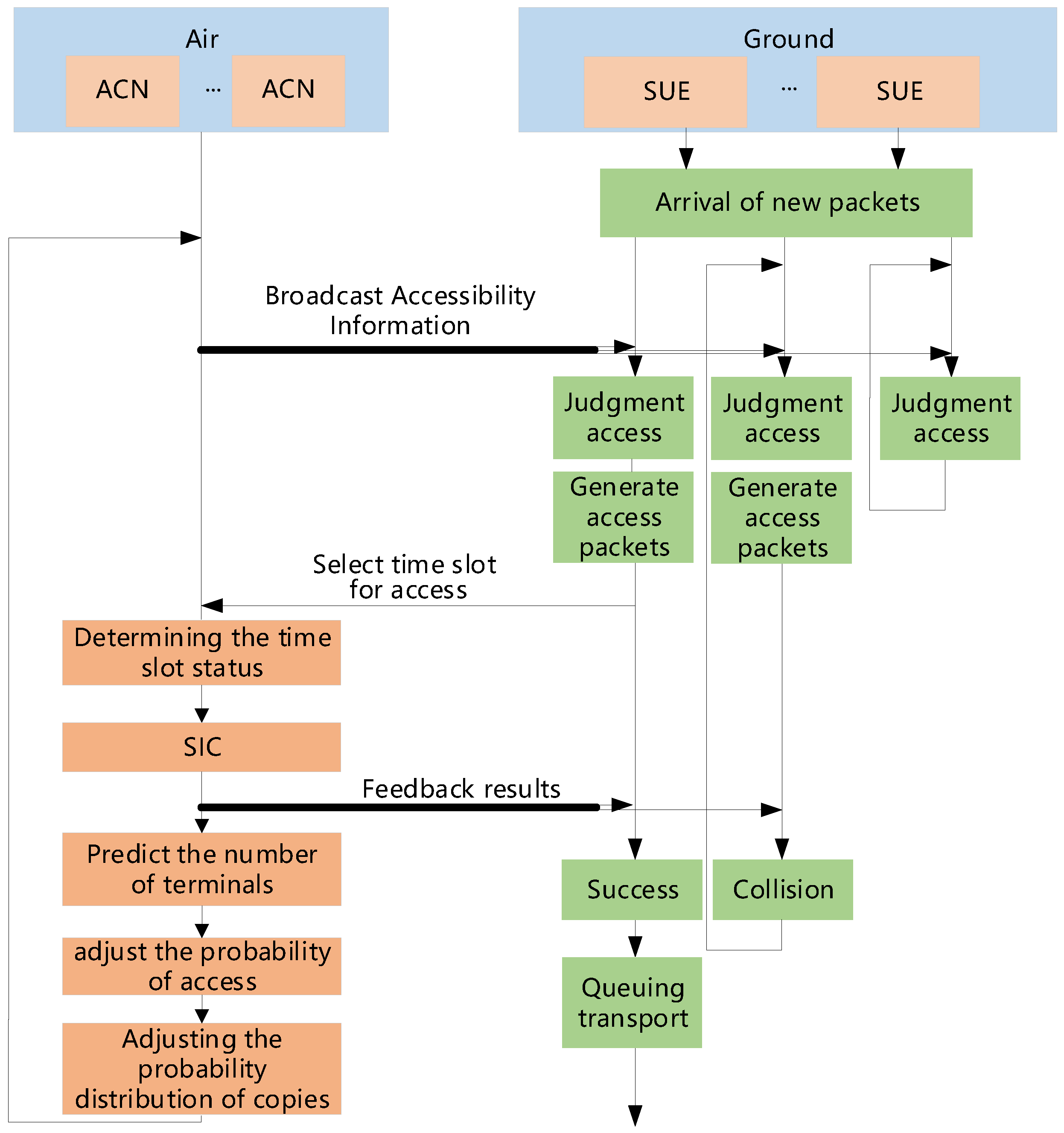
- We propose the Separation of Transmission and Control ALOHA (STCA) protocol, which moves access control from the satellite to airborne access control nodes (ACNs), confining collisions to the ACN layer and improving satellite channel utilization.
- A load estimation and control algorithm is designed to dynamically adjust the access probability of each piece of SUE based on IRSA, preventing performance degradation under high load.
- By separating access control from data transmission, access packets contain only essential information. The use of minislots reduces frame length compared with IRSA, which requires many slots.
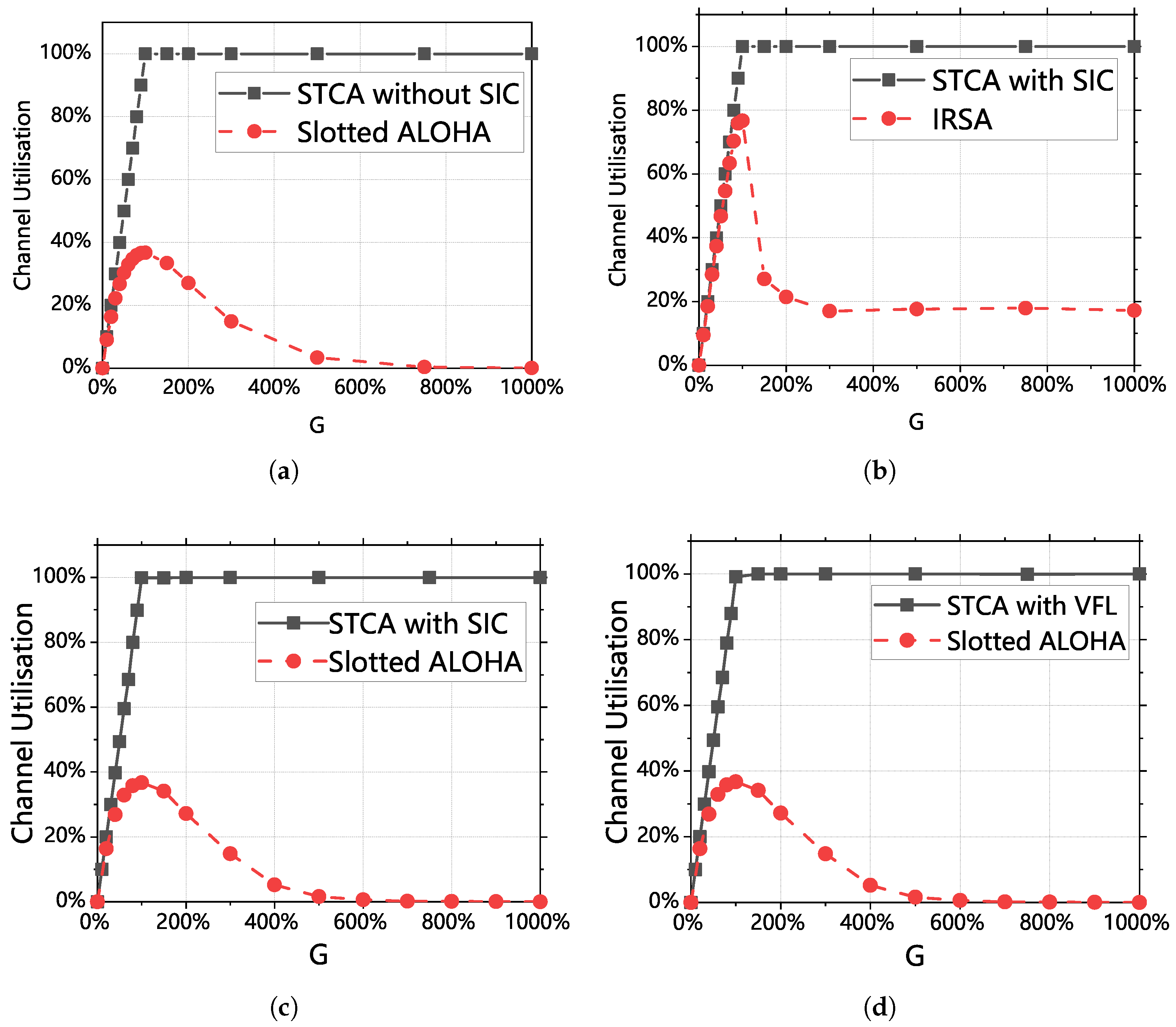
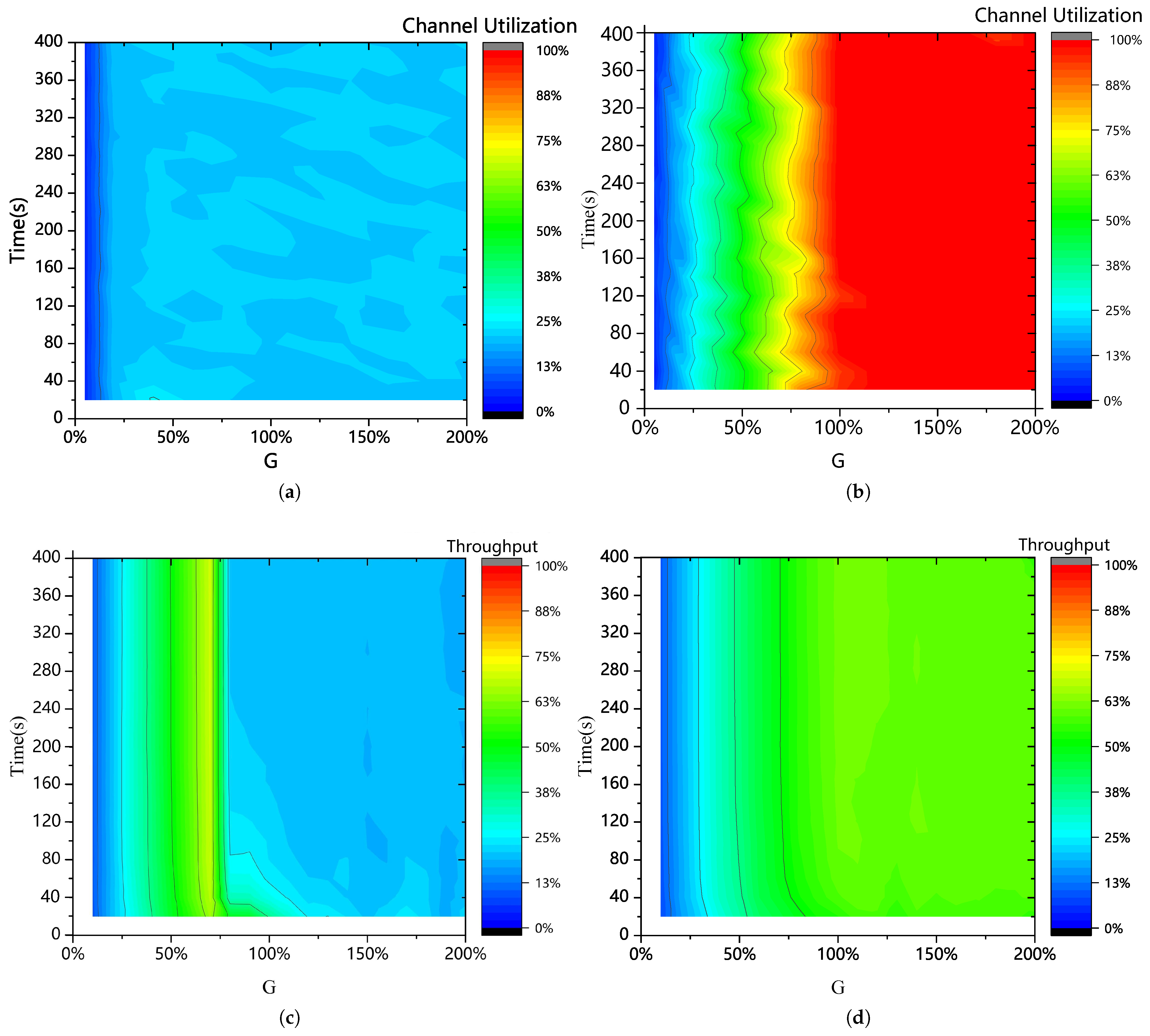
- Simulation results show that STCA achieves significantly higher channel utilization and throughput stability than IRSA and traditional Slotted ALOHA, providing an efficient solution for multi-user access in satellite communications.
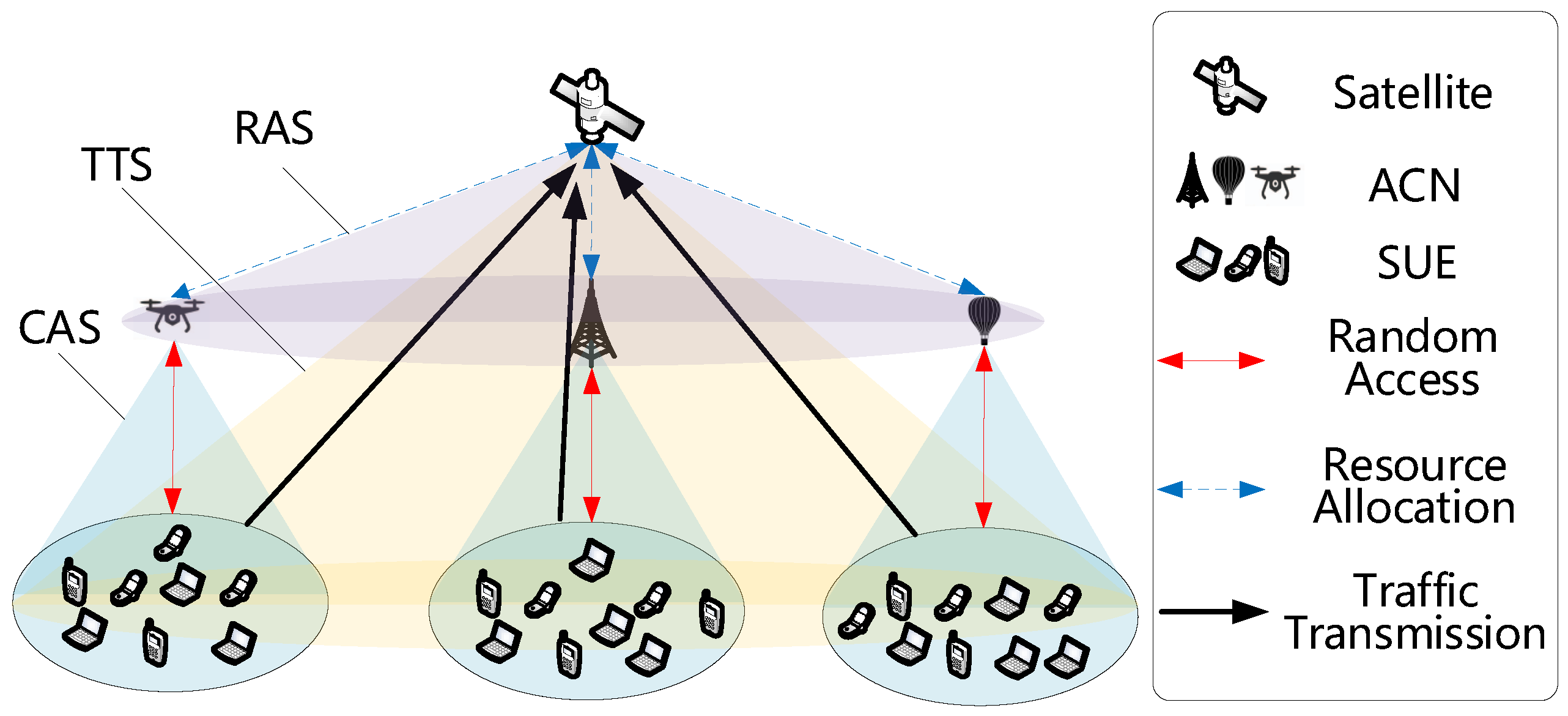
2. System Model
- (1)
- The Contention Access Spectrum (CAS) connects the ACNs to SUE and is used for contending access and broadcasting the indices of traffic transmission allocated by the satellite;
- (2)
- The Resource Allocation Spectrum (RAS) connects satellites to the ACNs and is used for allocating traffic transmission resources to ACNs according to the load of each ACN;
- (3)
- The Traffic Transmission Spectrum (TTS) connects the satellites to SUE and is used to convey the traffic data within the traffic transmission resources that the SUE has competed for from the ACNs.
| Algorithm 1: Transmission–control separation algorithm |
 |
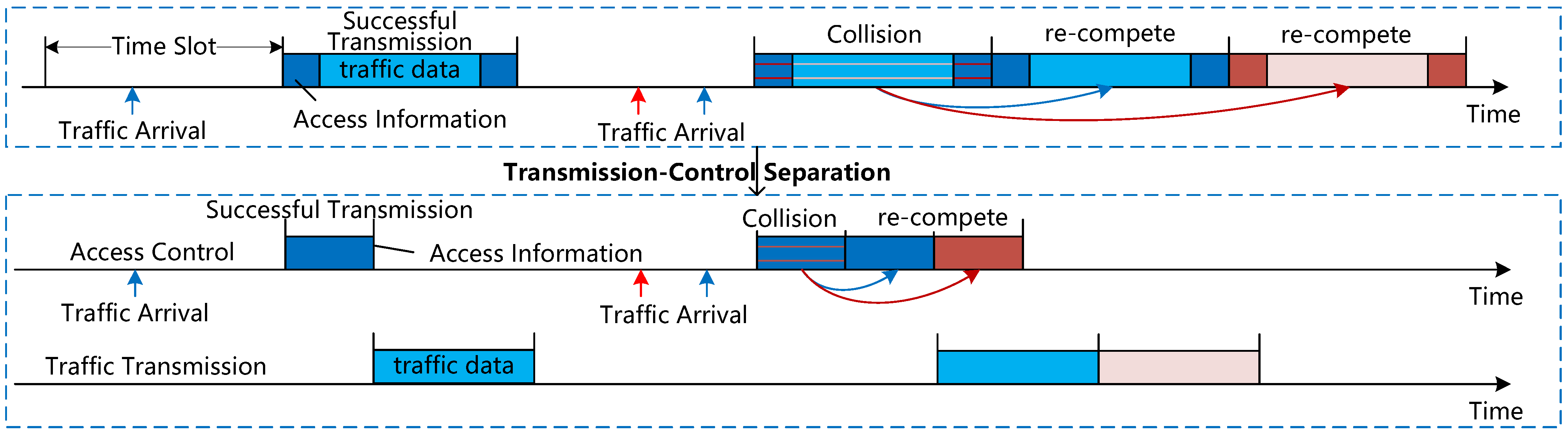
- Success indicates that one single piece of SUE transmits a contention packet over the CAS slot. The successful SUE transmits the traffic packet over the TTS slots.
- Collision indicates that more than one piece of SUE transmits contention packets over the CAS slot. The collided pieces of SUE need to re-compete for another CAS slot in the next frame and store the traffic packets until no collision occurs over the chosen CAS slot.
- Idle indicates that no SUE transmits contention packet over the CAS slot.
3. Problem Description
4. The Proposed STCA Protocol
4.1. STCA Without SIC
4.2. STCA with SIC
4.3. STCA with Variable Frame Length
5. Numerical Results
5.1. Simulation Setup
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IRSA | Irregular Repetition Slotted ALOHA |
| STCA | Separated Transmission and Control ALOHA |
| CSMA | Carrier Sense Multiple Access |
| SA | Slotted ALOHA |
| DSA | Diversity Slotted ALOHA |
| CRDSA | Contention Resolution Diversity Slotted ALOHA |
| CAS | Contention Access Spectrum |
| RAS | Resource Allocation Spectrum |
| TTS | Traffic Transmission Spectrum |
| SIC | Successive Interference Cancellation |
| VFL | Variable Frame Length |
References
- Zhu, X.; Jiang, C. Integrated Satellite-Terrestrial Networks Toward 6G: Architectures, Applications, and Challenges. IEEE Internet Things J. 2022, 9, 437–461. [Google Scholar] [CrossRef]
- Kaur, A.; Gregory, M.A. Performance Analysis of Random Multiple Access Protocols Used in Wireless Communication. In Proceedings of the 7th International Conference on Broadband Communications and Biomedical Applications, Melbourne, VIC, Australia, 21–24 November 2011; IEEE: New York, NY, USA, 2011; pp. 12–17. [Google Scholar]
- Kleinrock, L.; Tobagi, F. Packet Switching in Radio Channels: Part I—Carrier Sense Multiple-Access Modes and Their Throughput-Delay Characteristics. IEEE Trans. Commun. 1975, 23, 1400–1416. [Google Scholar] [CrossRef]
- Roberts, L. ALOHA Packet System with and Without Slots and capture. Comput. Commun. Rev. 1975, 5, 28–42. [Google Scholar] [CrossRef]
- Mei, H.; Peng, L.; Ho, P.H. A Novel Framework of K-repetition Grant-free Access via Diversity Slotted Aloha (DSA). arXiv 2024, arXiv:2401.04539. [Google Scholar]
- Casini, E.; De Gaudenzi, R.; Herrero, O.D.R. Contention resolution diversity slotted ALOHA (CRDSA): An Enhanced Random Access Scheme for Satellite Access Packet Networks. IEEE Trans. Wireless Commun. 2007, 6, 1408–1419. [Google Scholar] [CrossRef]
- Liva, G. Graph-Based Analysis and Optimization of Contention Resolution Diversity Slotted ALOHA. IEEE Trans. Commun. 2011, 59, 477–487. [Google Scholar] [CrossRef]
- Lyu, B.; Liu, C.; Yue, X. Integrated Predictor–Observer Feedback Control for Vibration Mitigation of Large-Scale Spacecraft with Unbounded Input Time Delay. IEEE Trans. Aerosp. Electron. Syst. 2025, 61, 4561–4572. [Google Scholar] [CrossRef]
- Park, J.; Youn, J.; Oh, J.; Im, J.; Ahn, S.; Kim, S.; Cho, S. Random Access Protocol for Massive Internet of Things Connectivity in Space–Air–Ground-Integrated Networks. IEEE Internet Things J. 2023, 10, 20442–20457. [Google Scholar] [CrossRef]
- Laya, A.; Kalalas, C.; Vazquez-Gallego, F.; Alonso, L.; Alonso-Zarate, J. Goodbye, ALOHA! IEEE Access 2016, 4, 2029–2044. [Google Scholar] [CrossRef]
- Xu, W.; Campbell, G. A Near Perfect Stable Random Access Protocol for a Broadcast Channel. In Proceedings of the [Conference Record] SUPERCOMM/ICC ’92 Discovering a New World of Communications, Chicago, IL, USA, 14–18 June 1992; IEEE: New York, NY, USA, 1992; pp. 370–374. [Google Scholar]
- Wu, W.; Li, Y.; Zhang, Y.; Wang, B.; Wang, W. Distributed Queueing-Based Random Access Protocol for LoRa Networks. IEEE Internet Things J. 2020, 7, 763–772. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of ACNs | 1 |
| Number of pieces of SUE | 220 |
| Frame duration | 44 ms |
| Slot duration | 4 ms |
| Minislot duration | 0.2 ms |
| Data packet duration | 4 ms |
| Access packet duration | 0.2 ms |
| 2-copy probability | 0.5 |
| 3-copy probability | 0.28 |
| 8-copy probability | 0.22 |
| Initial estimated SUE arrival rate | 1/22 |
| Initial estimated access probability | 1 |
| Maximum iteration count | 200 |
| Simulation duration | 20,000 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Ma, X.; Xin, X.; Han, W.; Dong, Y. Airborne-Platform-Assisted Transmission and Control Separation for Multiple Access in Integrated Satellite–Terrestrial Networks. Sensors 2025, 25, 4732. https://doi.org/10.3390/s25154732
Huang C, Ma X, Xin X, Han W, Dong Y. Airborne-Platform-Assisted Transmission and Control Separation for Multiple Access in Integrated Satellite–Terrestrial Networks. Sensors. 2025; 25(15):4732. https://doi.org/10.3390/s25154732
Chicago/Turabian StyleHuang, Chaoran, Xiao Ma, Xiangren Xin, Weijia Han, and Yanjie Dong. 2025. "Airborne-Platform-Assisted Transmission and Control Separation for Multiple Access in Integrated Satellite–Terrestrial Networks" Sensors 25, no. 15: 4732. https://doi.org/10.3390/s25154732
APA StyleHuang, C., Ma, X., Xin, X., Han, W., & Dong, Y. (2025). Airborne-Platform-Assisted Transmission and Control Separation for Multiple Access in Integrated Satellite–Terrestrial Networks. Sensors, 25(15), 4732. https://doi.org/10.3390/s25154732