
The Application of Mobile Devices for Measuring Accelerations in Rail Vehicles: Methodology and Field Research Outcomes in Tramway Transport


Abstract
1. Introduction
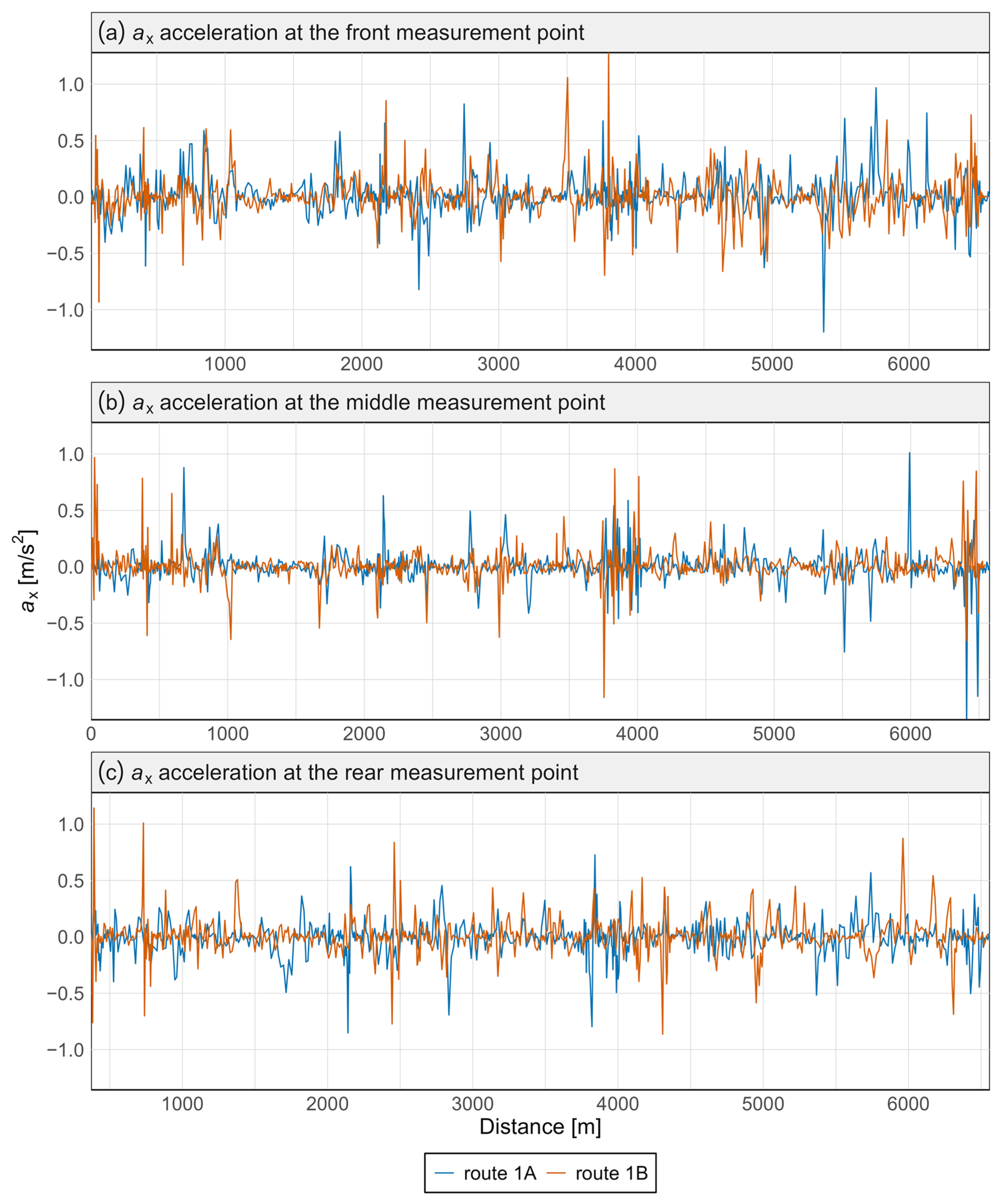
- Basic evaluation involves the analysis of a long-duration measurement segment with continuous data acquisition. It can be assessed using the basic method, in which measurement devices are placed on the vehicle floor at the front, middle, and rear of the train, on the inner side of the track. An alternative is the accurate method, where measurements are also taken from the vehicle floor, but allow for analysis at the additional measurement points beyond those defined in the basic method.
- Continuous evaluation accounts for short-term variations in passenger perception. Acceleration measurements are recorded from the floor of the vehicle in three orthogonal directions, capturing rapid changes in vibrational input.
- Transitional curve evaluation refers to the discomfort experienced by passengers when the rail vehicles travel through transition curves into or out of a bend. This assessment focuses on sudden changes in motion and lateral accelerations and includes the recording of roll velocity.
- Discrete event evaluation assesses the impact of short-term, noticeable fluctuations such as abrupt speed changes, vibrations, and jolts. Measurement devices for this purpose are also mounted on the floor of the transport unit.
2. Materials and Methods
3. Results
3.1. Presentation of a Sample of Raw Results and Their Contents
3.2. Discussion of the Data Processing Methodology and Extraction of Additional Parameters
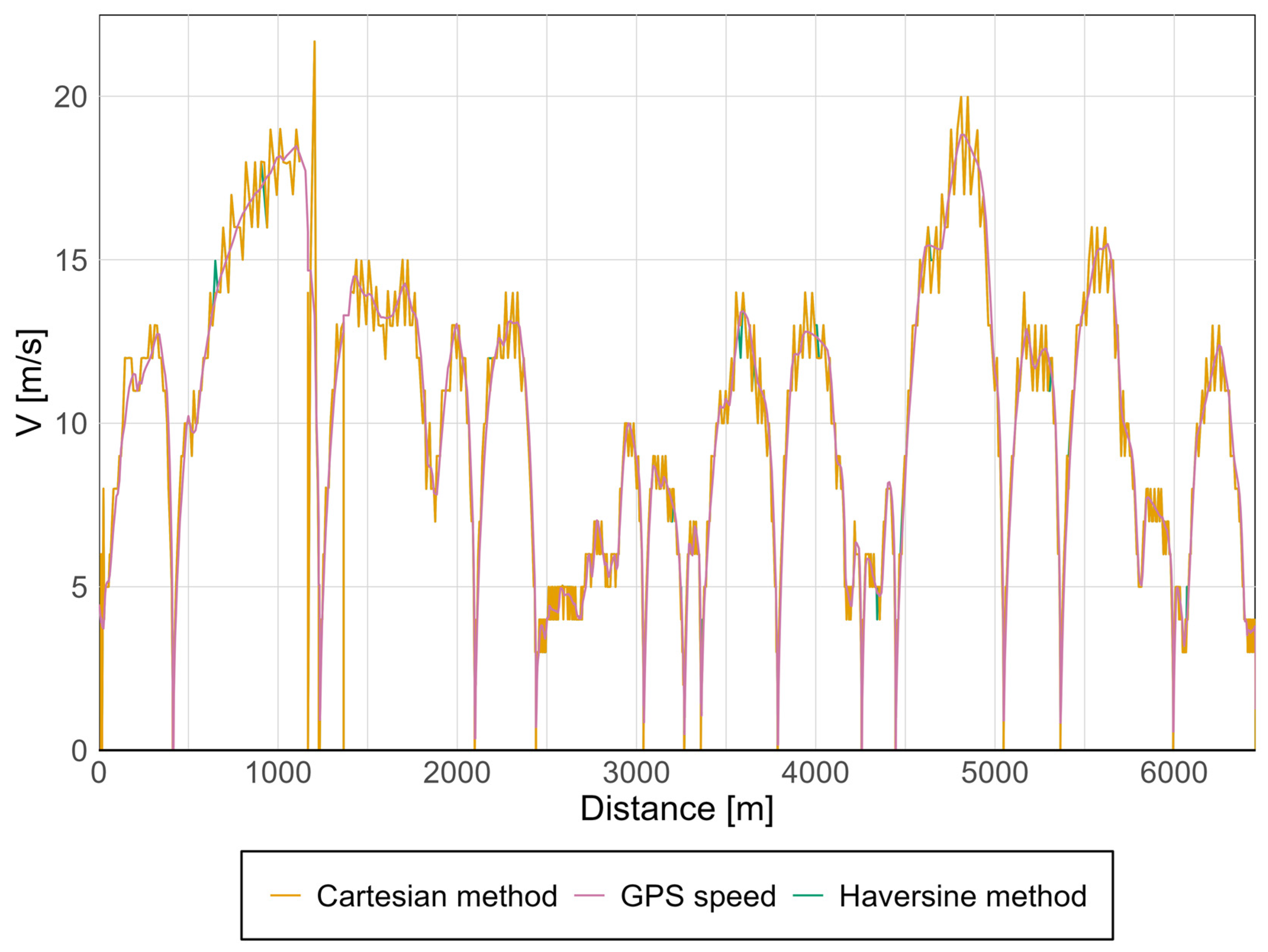
- Haversine method (considering Earth’s spherical shape):Uses the haversine_distance () function, which calculates the distance between two points on the surface of a sphere, accounting for the Earth’s curvature. This method provides greater accuracy over larger distances.
- Simplified method (Cartesian approximation):Uses the simplified_distance () function, which approximates the Earth’s surface as a flat plane. This approach is computationally faster but less accurate, particularly over longer distances.
- Iterate through consecutive pairs of GPS coordinates.
- Calculate the distance between each pair of points.
- Sum the distances to obtain the total (cumulative) distance of travel.
- Calculate the time difference between consecutive GPS points.
- Divide the distance by the time difference to obtain the speed.
- Convert the speed to kilometers per hour (km/h).
3.3. Presentation of a Sample of Processed Data
3.4. Presentation of Results in Graphs with Discussion and Comparison
4. Conclusions and Discussion
- validating smartphone-derived data against certified sensors to quantify errors and refine data analysis algorithms,
- incorporating longitudinal acceleration into the evaluation to assess passenger stability during acceleration and braking,
- addressing the challenge of non-uniform MEMS and GPS sampling frequencies through potential firmware or app-level enhancements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MEMS | Microelectromechanical Systems |
| GPS | Global Positioning System |
| IMU | Interrail Measurement Unit |
| SKM | Fast Urban Railway |
| DC | Direct Current |
| EMU | Electric Multiple Units |
| DMU | Diesel Multiple Units |
References
- Sventeková, E.; Urbancová, Z.; Hollá, K. Assessment of the vulnerability of selected key elements of rail transport. Slovak case study. Appl. Sci. 2021, 11, 6174. [Google Scholar] [CrossRef]
- Kanis, J.; Zitrický, V. Automatic detection of track length defects. LOGI–Sci. J. Transp. Logist. 2022, 13, 13–24. [Google Scholar] [CrossRef]
- Esmaeeli, N.; Sattari, F.; Lefsrud, L.; Macciotta, R. Critical analysis of train derailments in canada through process safety techniques and insights into enhanced safety management systems. Transp. Res. Rec. J. Transp. Res. Board 2022, 2676, 603–625. [Google Scholar] [CrossRef]
- Binder, M.; Mezhuyev, V.; Tschandl, M. Predictive maintenance for railway domain: A systematic literature review. IEEE Eng. Manag. Rev. 2023, 51, 120–140. [Google Scholar] [CrossRef]
- Dumitriu, M. Fault detection of damper in railway vehicle suspension based on the cross-correlation analysis of bogie accelerations. Mech. Ind. 2019, 20, 102. [Google Scholar] [CrossRef]
- Oregui, M.; Li, S.; Núñez, A.; Li, Z.; Carroll, R.; Dollevoet, R. Monitoring bolt tightness of rail joints using axle box acceleration measurements. Struct. Control Health Monit. 2016, 24, e1848. [Google Scholar] [CrossRef]
- Jeon, N.; Lee, H. Integrated fault diagnosis algorithm for motor sensors of in-wheel independent drive electric vehicles. Sensors 2016, 16, 2106. [Google Scholar] [CrossRef]
- Shafiee, M.; Patriksson, M.; Chukova, S. An optimal age–usage maintenance strategy containing a failure penalty for application to railway tracks. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 230, 407–417. [Google Scholar] [CrossRef]
- Silva, P.; Ribeiro, D.; Pratas, P.; Mendes, J.; Seabra, E. Indirect assessment of railway infrastructure anomalies based on passenger comfort criteria. Appl. Sci. 2023, 13, 6150. [Google Scholar] [CrossRef]
- Chudzikiewicz, A.; Bogacz, R.; Kostrzewski, M.; Konowrocki, R. Condition monitoring of railway track systems by using acceleration signals on wheelset axle-boxes. Transport 2017, 33, 555–566. [Google Scholar] [CrossRef]
- Gou, H.; Liu, C.; Hua, H.; Bao, Y.; Pu, Q. Mapping relationship between dynamic responses of high-speed trains and additional bridge deformations. J. Vib. Control 2020, 27, 1051–1062. [Google Scholar] [CrossRef]
- Song, X.; Qian, Y.; Wang, K.; Liu, P. Effect of rail pad stiffness on vehicle–track dynamic interaction excited by rail corrugation in metro. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 225–243. [Google Scholar] [CrossRef]
- Real, J.; Zuriaga, P.; Montalbán-Domingo, L.; Bueno, M. Determination of rail vertical profile through inertial methods. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 225, 14–23. [Google Scholar] [CrossRef]
- Paixão, A.; Fortunato, E.; Calçada, R. The effect of differential settlements on the dynamic response of the train–track system: A numerical study. Eng. Struct. 2015, 88, 216–224. [Google Scholar] [CrossRef]
- Powell, J.; Palacín, R. Passenger stability within moving railway vehicles: Limits on maximum longitudinal acceleration. Urban Rail Transit 2015, 1, 95–103. [Google Scholar] [CrossRef]
- Paixão, A.; Fortunato, E.; Calçada, R. Smartphone’s sensing capabilities for on-board railway track monitoring: Structural performance and geometrical degradation assessment. Adv. Civ. Eng. 2019, 2019, 1729153. [Google Scholar] [CrossRef]
- Anandan, A.; Kandavel, A. Investigation and performance comparison of ride comfort on the created human vehicle road integrated model adopting genetic algorithm optimized proportional integral derivative control technique. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 288–305. [Google Scholar] [CrossRef]
- Liu, J.; Chen, S.; Lederman, G.; Kramer, D.; Noh, H.; Bielak, J.; Garrett, J.H.; Kovačević, J.; Bergés, M. Dynamic responses, gps positions and environmental conditions of two light rail vehicles in pittsburgh. Sci. Data 2019, 6, 146. [Google Scholar] [CrossRef]
- Zanelli, F.; Sabbioni, E.; Carnevale, M.; Mauri, M.; Tarsitano, D.; Dezza, F.; Debattisti, N. Wireless sensor nodes for freight trains condition monitoring based on geo-localized vibration measurements. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 237, 193–204. [Google Scholar] [CrossRef]
- Wang, Q.-A.; Ni, Y.-Q. Measurement and Forecasting of High-Speed Rail Track Slab Deformation under Uncertain SHM Data Using Variational Heteroscedastic Gaussian Process. Sensors 2019, 19, 3311. [Google Scholar] [CrossRef]
- Guo, G.; Cui, X.; Du, B. Random-Forest Machine Learning Approach for High-Speed Railway Track Slab Deformation Identification Using Track-Side Vibration Monitoring. Appl. Sci. 2021, 11, 4756. [Google Scholar] [CrossRef]
- Šipić, P. Komfort jazdy w pasażerskim transporcie szynowym. TTS Tech. Transp. Szyn. 2007, 7–8, 42–49. [Google Scholar]
- Meriam, J.L.; Kraige, L.G. Engineering Mechanics: Dynamics, 5th ed.; Wiley: Hoboken, NJ, USA, 2002; Volume 2. [Google Scholar]
- Nowakowski, T. Opracowanie Metody Oceny Aktywności Wibroakustycznej Tramwaju w Oparciu o Pomiary Przytorowe. Ph.D. Thesis, Poznan University of Technology, Poznań, Poland, 2020. [Google Scholar]
- Zając, G. Badania hałasu i drgań w tramwajach, Czasopismo Techniczne. Mechanika 2011, 108, 131–145. [Google Scholar]
- Tarkowski, S.; Rybicka, I. Metody oceny poziomu komfortu dynamicznego w transporcie pasażerskim. Autobusy Tech. Eksploat. Syst. Transp. 2016, 17, 1385–1391. [Google Scholar]
- Dižo, J.; Blatnický, M.; Gerlici, J.; Leitner, B.; Melnik, R.; Semenov, S.; Mikhailov, E.; Kostrzewski, M. Evolution of Ride Comfort in a Railway Passenger Car Depending on a Change of Suspension Parameters. Sensors 2021, 21, 8138. [Google Scholar] [CrossRef]
- PN-EN 12299:2009; Railway Applications—Comfort of Passengers—Measurements and Assessment [Standard]. Polish Committee for Standardization: Warsaw, Poland, 2009; ISBN 978-83-251-7963-2.
- Oczykowski, A. Badania i rozwój przytwierdzenia sprężystego SB. Probl. Kolejnictwa 2010, 150, 121–156. [Google Scholar]
- Karpenko, M.; Prentkovis, O.; Skaĉkauskas, P. Analysing the impact of electric kick-scooters on drivers: Vibration and frequency transmission during the ride on different types of urban pavements. Maint. Reliab. 2025, 27, 1–14. [Google Scholar] [CrossRef]
- Botshekan, M.; Roxon, J.; Wanichkul, A.; Chirananthavat, T.; Chamoun, J.; Ziq, M.; Anini, B.; Daher, N.; Awad, A.; Ghane, W.; et al. Roughness-induced vehicle energy dissipation from crowdsourced smartphone measurements through random vibration theory. Data-Centric Eng. 2020, 1, e16. [Google Scholar] [CrossRef]
- Botshekan, M.; Asaadi, E.; Roxon, J.; Ulm, F.; Tootkaboni, M.; Louhgalam, A. Smartphone-enabled road condition monitoring: From accelerations to road roughness and excess energy dissipation. Proc. R. Soc. A 2021, 477, 20200701. [Google Scholar] [CrossRef]
- Stockx, T.; Hecht, B.J.; Schöning, J. SubwayPS: Towards Enabling Smartphone Positioning in Underground Public Transportation Systems. In Proceedings of the 22nd ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Dallas, TX, USA, 4–7 November 2014; pp. 93–102. [Google Scholar] [CrossRef]
- Celiński, I.; Burdzik, R.; Młyńczak, J.; Kłaczyński, M. Research on the Applicability of Vibration Signals for Real-Time Train and Track Condition Monitoring. Sensors 2022, 22, 2368. [Google Scholar] [CrossRef]
- Tsunashima, H.; Honda, R.; Matsumoto, A. Track Condition Monitoring Based on In-Service Train Vibration Data Using Smartphones. In New Research on Railway Engineering and Transport; IntechOpen: London, UK, 2023. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, L.; Wang, S.; Zhen, G.; Tang, Z. Mobile Device-Based Train Ride Comfort Measuring System. Appl. Sci. 2022, 12, 6904. [Google Scholar] [CrossRef]
- Urbaniak, M.; Nowak, B.; Smoliński, K. Results of accelerometer measurements in rail passenger transport vehicles [Dataset]. Gdańsk Univ. Technol. 2024. [Google Scholar] [CrossRef]
- Mariscotti, A.; Sandrolini, L. Detection of harmonic overvoltage and resonance in ac railways using measured pantograph electrical quantities. Energies 2021, 14, 5645. [Google Scholar] [CrossRef]
- Koffas, K.; Moschovou, T.P.; Liberis, K. Development of a Methodological Approach for the Design of Train Speed Trajectory Diagrams for the Suburban Railways—Application on the Greek Railway Line Athens–Chalkida. Eng 2024, 5, 1641–1656. [Google Scholar] [CrossRef]
- Physics Toolbox by Vieyra Software. Available online: https://www.vieyrasoftware.net/ (accessed on 25 July 2025).
- Van Brummelen, G. Heavenly Mathematics: The Forgotten Art of Spherical Trigonometry; Princeton University Press: Princeton, NJ, USA, 2017. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time [hh:mm:ss] | Acceleration ax [m/s2] | Acceleration ay [m/s2] | Acceleration az [m/s2] | Gain [dB] | Latitude [°] | Longitude [°] | Speed [m/s] |
|---|---|---|---|---|---|---|---|
| … | … | … | … | … | … | … | … |
| 09:13:11:005 | −0.0392 | 0.0905 | 0.0089 | 97.8385 | 54.35 | 18.643 | 4.46 |
| 09:13:12:006 | −0.0343 | −0.2142 | 0.1676 | 99.1421 | 54.348 | 18.643 | 4.28 |
| 09:13:13:007 | −0.7291 | −0.1872 | −1.2267 | 99.7207 | 54.348 | 18.642 | 3.91 |
| 09:13:14:007 | −0.3037 | −0.1197 | −0.1439 | 97.9997 | 54.348 | 18.642 | 4.07 |
| 09:13:15:007 | −0.295 | −0.0176 | 0.0253 | 99.7355 | 54.348 | 18.642 | 3.93 |
| 09:13:16:009 | 0.5498 | −0.0033 | −0.9949 | 99.9674 | 54.348 | 18.642 | 3.8 |
| 09:13:17:009 | −0.2679 | 0.1003 | 0.5391 | 99.6387 | 54.348 | 18.642 | 3.72 |
| … | … | … | … | … | … | … | … |
| Axis | Point | p-Value Mann–Whitney Test | p-Value Kolmogorov–Smirnov Test | Significant Difference |
|---|---|---|---|---|
| ax | Front | 0.774 | 0.387 | none |
| ax | Middle | 0.721 | 0.875 | none |
| ax | Rear | 0.137 | 0.232 | none |
| az | Front | 0.871 | 0.891 | none |
| az | Middle | 0.249 | 0.232 | none |
| az | Rear | 0.300 | 0.390 | none |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbaniak, M.; Myrcik, J.; Juda, M.; Mandrysz, J. The Application of Mobile Devices for Measuring Accelerations in Rail Vehicles: Methodology and Field Research Outcomes in Tramway Transport. Sensors 2025, 25, 4635. https://doi.org/10.3390/s25154635
Urbaniak M, Myrcik J, Juda M, Mandrysz J. The Application of Mobile Devices for Measuring Accelerations in Rail Vehicles: Methodology and Field Research Outcomes in Tramway Transport. Sensors. 2025; 25(15):4635. https://doi.org/10.3390/s25154635
Chicago/Turabian StyleUrbaniak, Michał, Jakub Myrcik, Martyna Juda, and Jan Mandrysz. 2025. "The Application of Mobile Devices for Measuring Accelerations in Rail Vehicles: Methodology and Field Research Outcomes in Tramway Transport" Sensors 25, no. 15: 4635. https://doi.org/10.3390/s25154635
APA StyleUrbaniak, M., Myrcik, J., Juda, M., & Mandrysz, J. (2025). The Application of Mobile Devices for Measuring Accelerations in Rail Vehicles: Methodology and Field Research Outcomes in Tramway Transport. Sensors, 25(15), 4635. https://doi.org/10.3390/s25154635