

Structural Monitoring Without a Budget—Laboratory Results and Field Report on the Use of Low-Cost Acceleration Sensors



Abstract
1. Introduction
1.1. SHM and Research on the Adaptation of Low-Cost Sensor Technology
- The synchronisation of different measurement nodes [33].
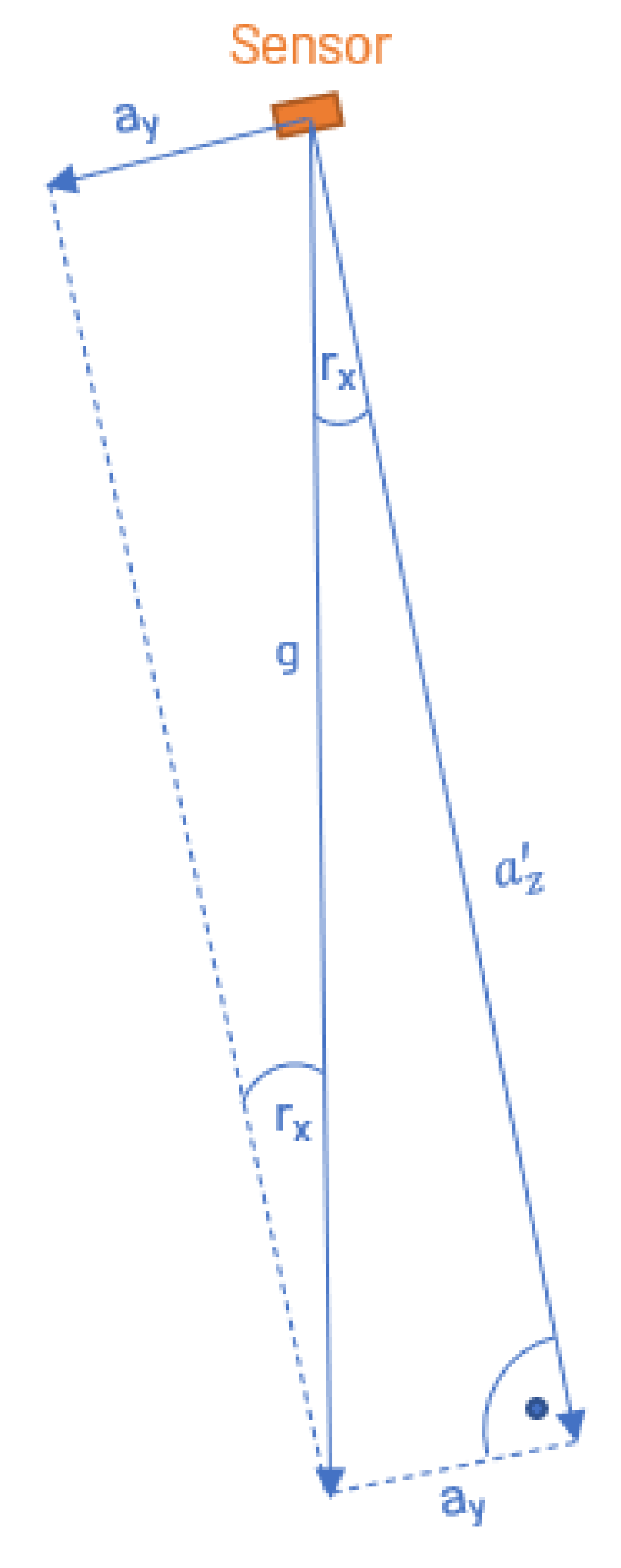
1.2. Static Analysis Using MEMS Acceleration Sensors
2. System Setup and Preliminary Investigation
2.1. Further Preliminary Investigations
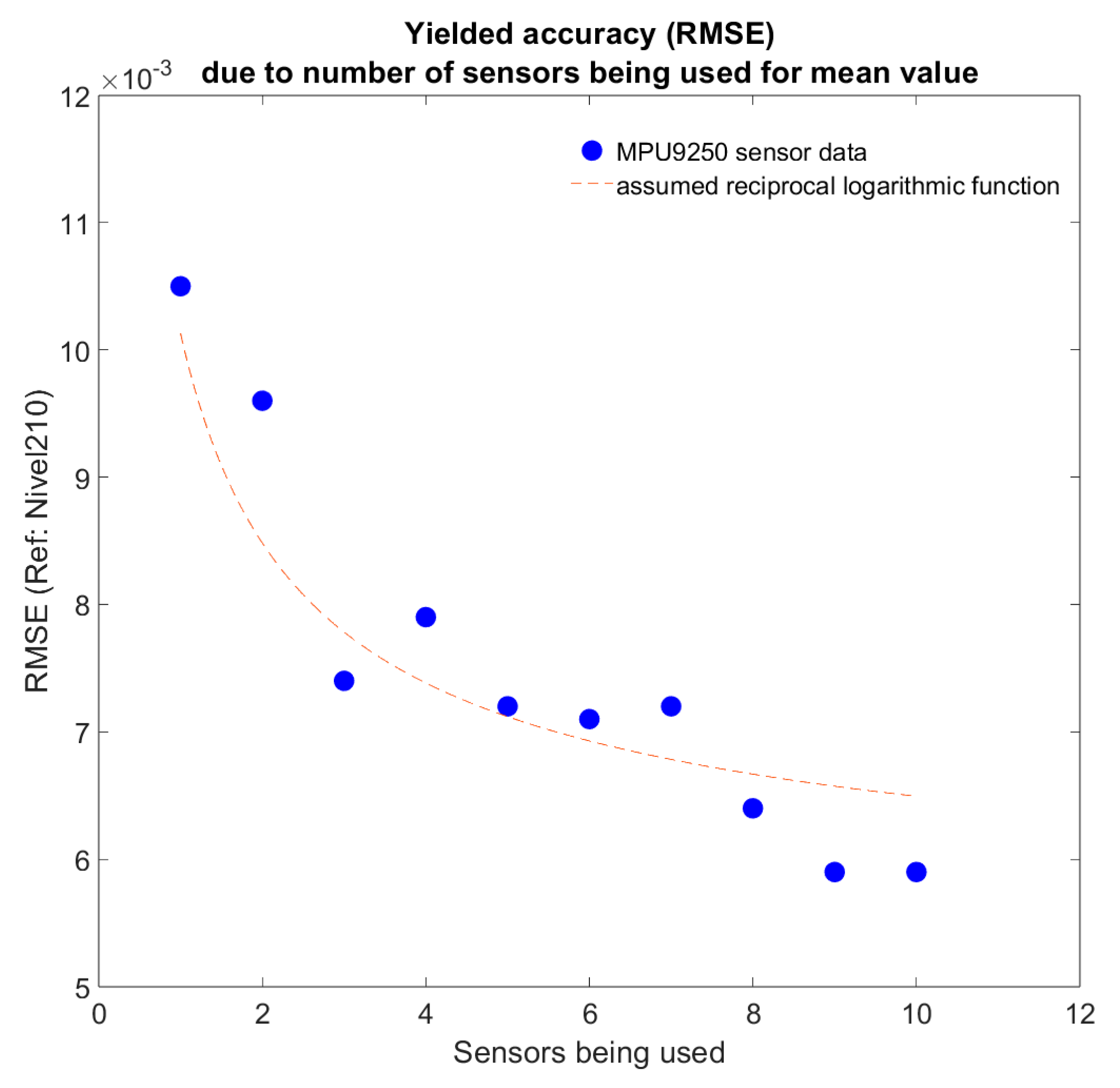
2.1.1. Optimal Number of Sensors
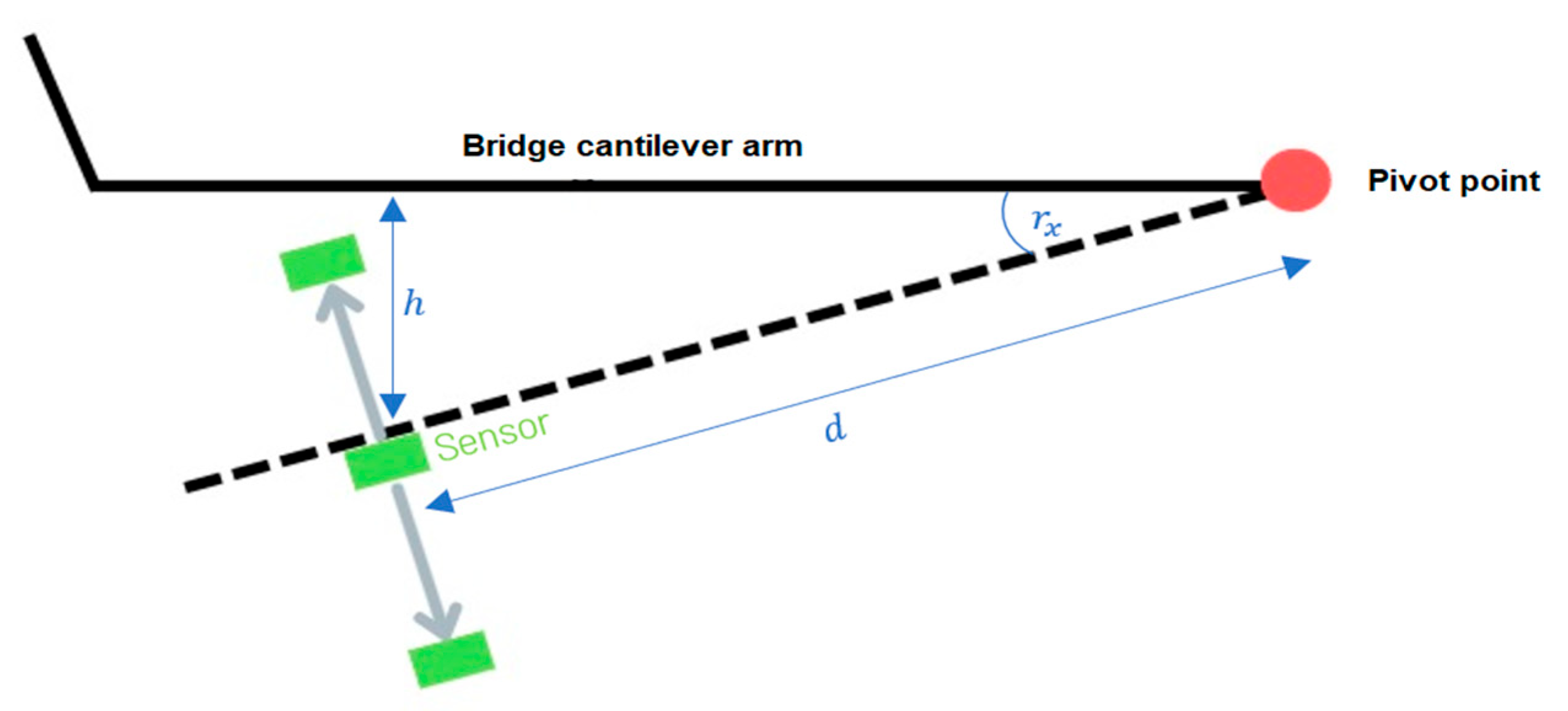
2.1.2. Field Test on a Bridge Structure
2.2. Influence of Error Characteristics and Environmental Conditions on the Application Case
- Bias;
- Scale error;
- Non-orthogonality;
- Temperature-induced errors;
- Deviations due to ageing, mechanical stress, and other rather minor causes such as effects related to the electrical circuitry of the sensor chip.
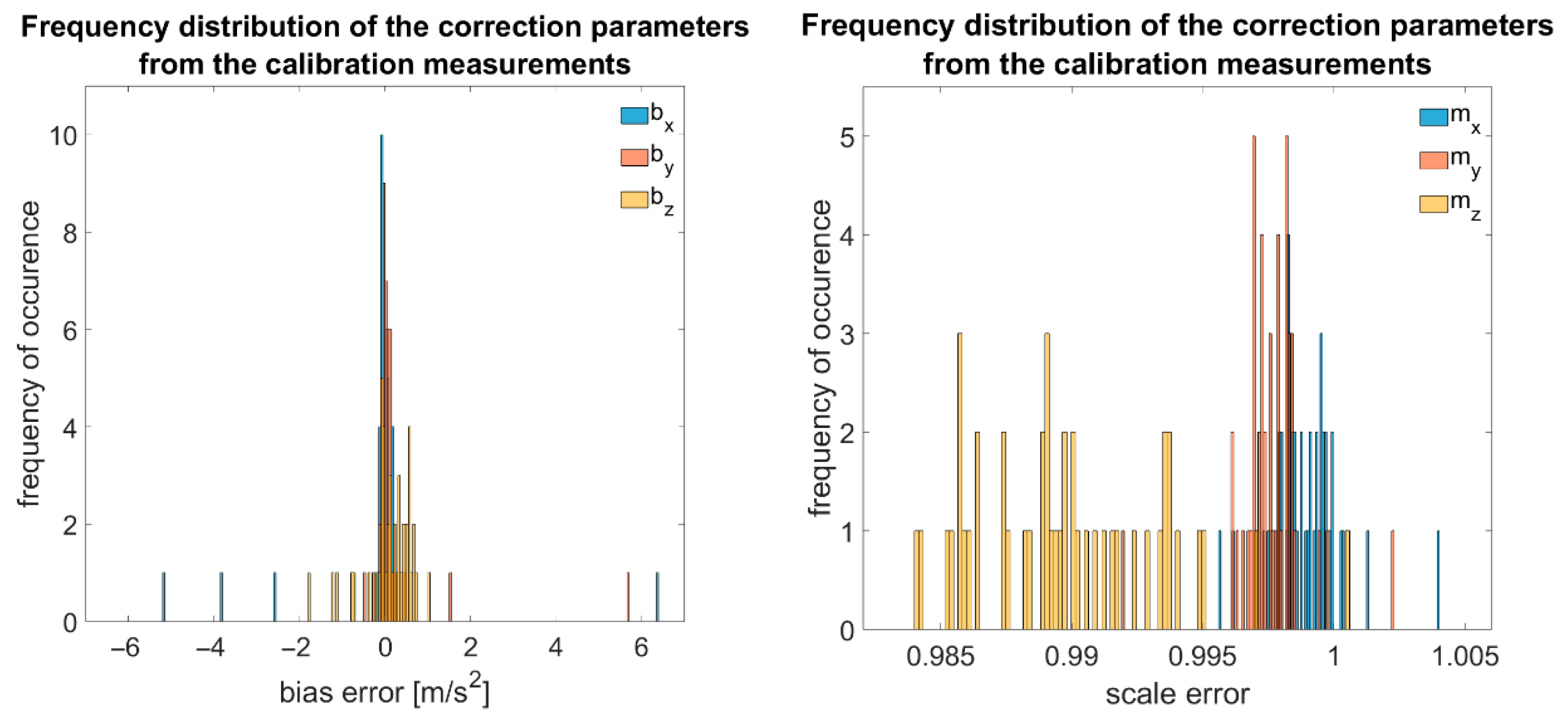
Estimation of Error Magnitudes and Comparison
- Bias: reduced, as only changes in inclinations are considered for further analysis in monitoring.
- Scale error: max. 0.995 for x- and y-axes.
- Orthogonality error: ±2%
- Noise: minimised in the specific application through averaging.
- Temperature dependency: max. 0.4 m/s2 (according to datasheet and own analysis).
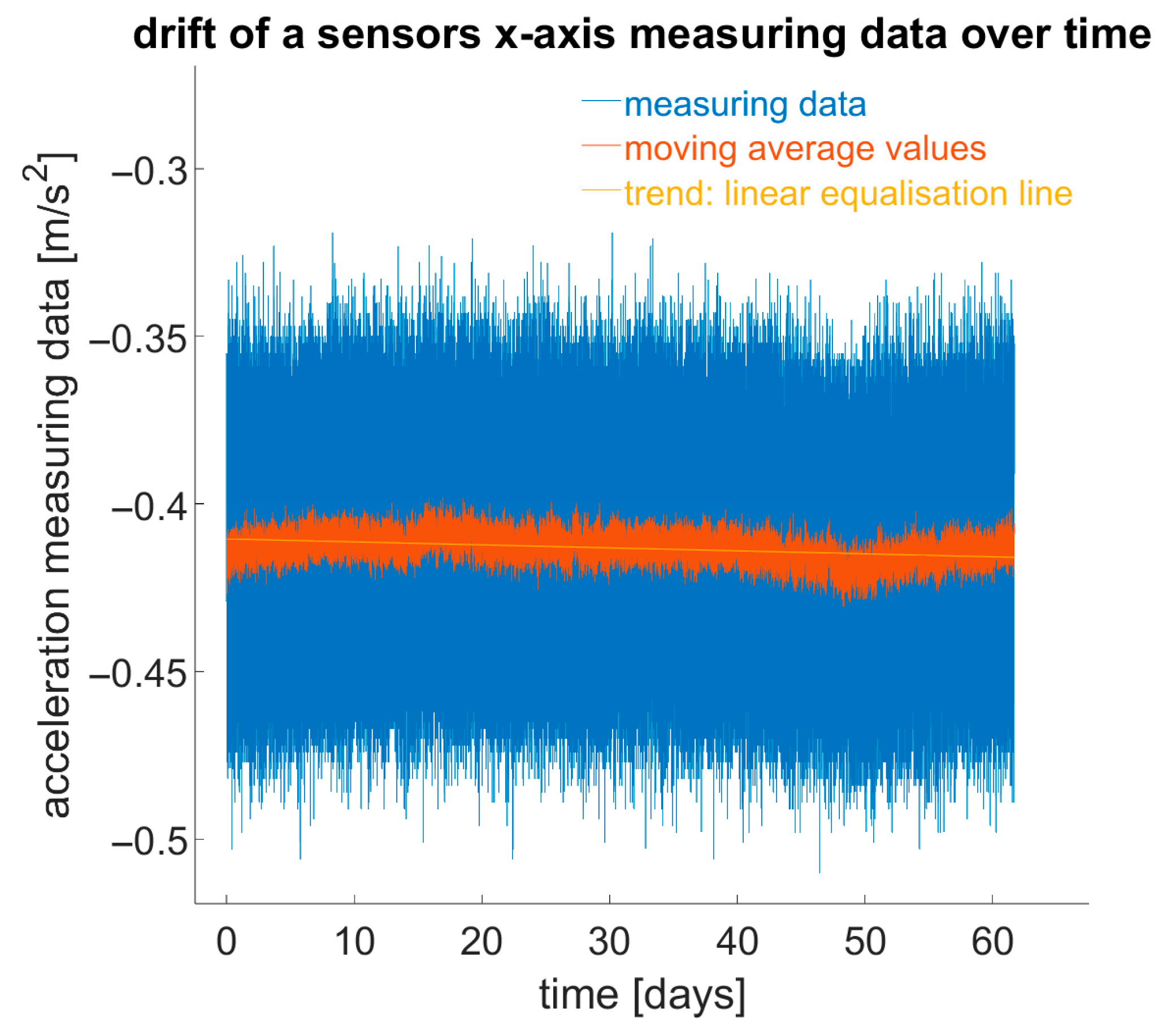
- Temporal sensor drift: x- and y-axes: up to , z-axes: up to .
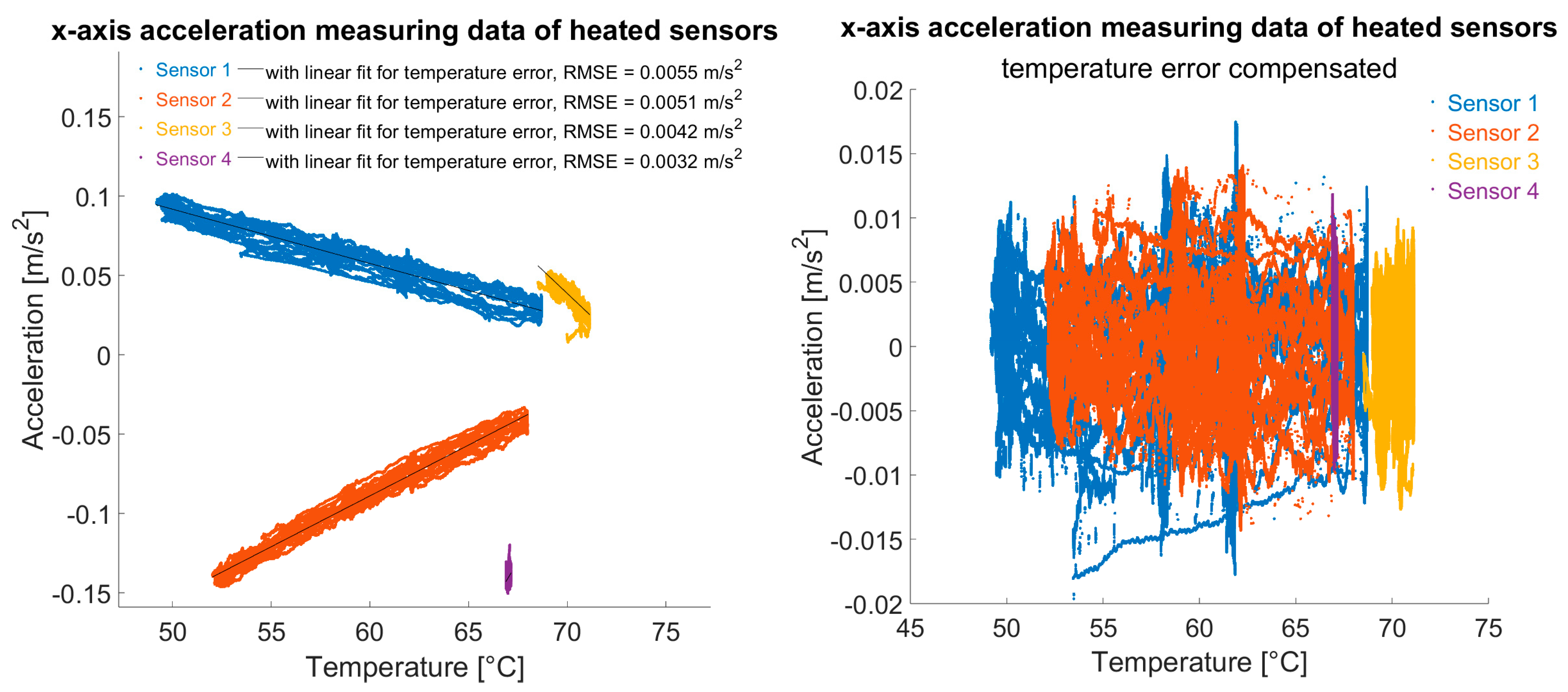
2.3. Temperature Effect Compensation
Experiment Setup and Execution
3. Results
3.1. Electrical Heating of Sensors

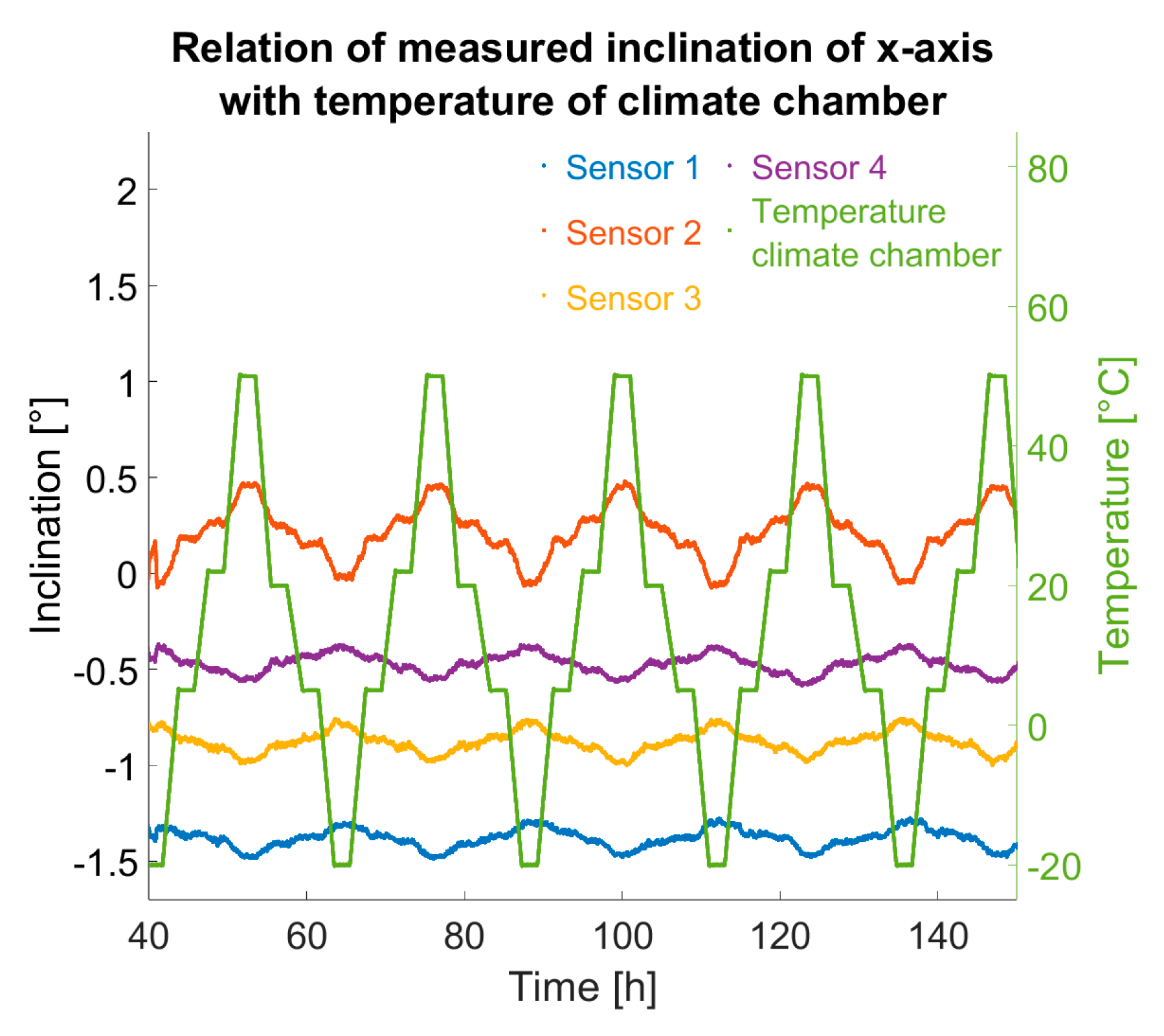
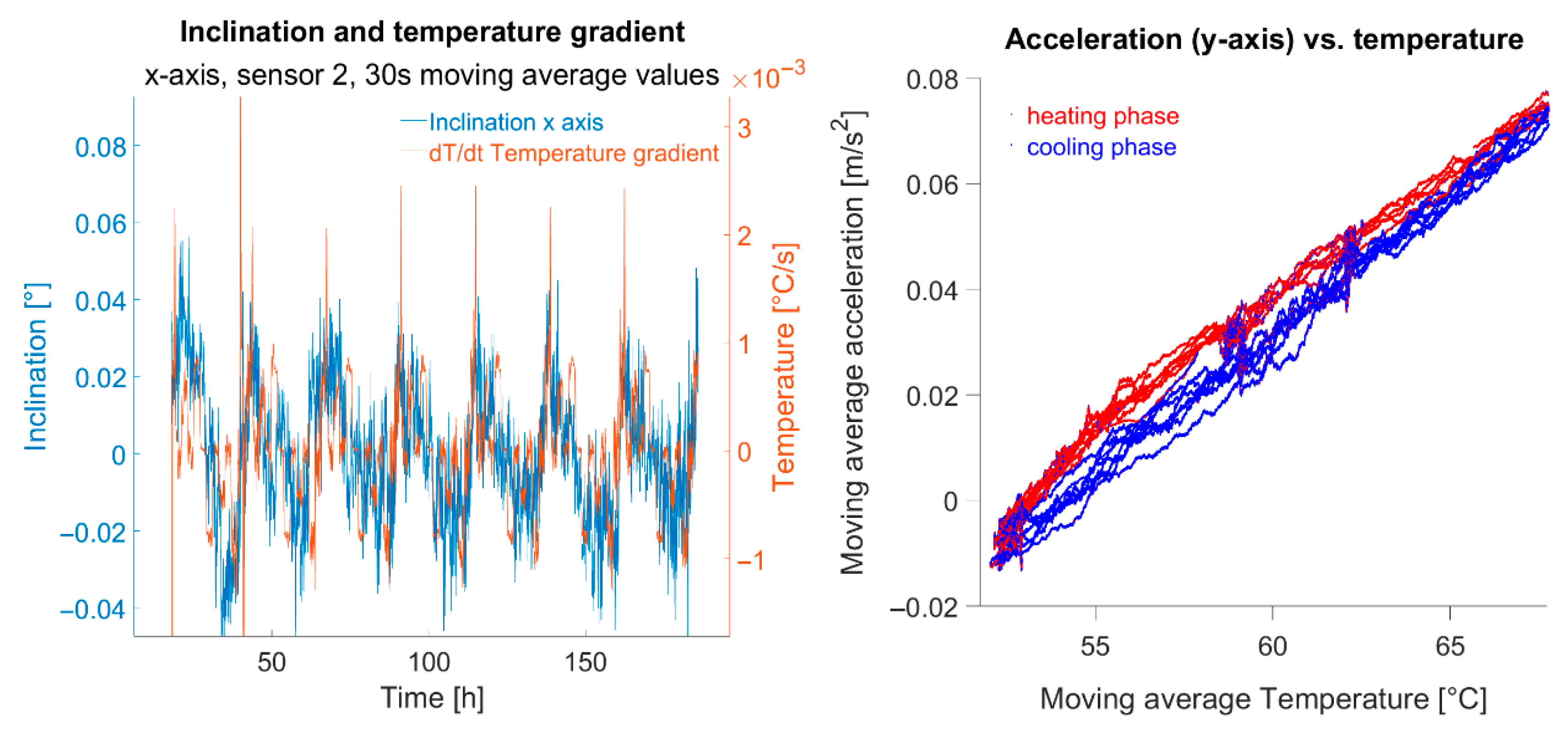
3.2. Linear Correlations Due to Temperature Control
3.3. Data Analysis and Processing
3.3.1. Simple Arithmetic Mean of MEMS Sensor Data
3.3.2. Heating and Cooling Phases
3.4. Summary of Result Data
Discussion of Results
4. Summary and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- BMVI. Stand Der Modernisierung von Brücken Der Bundesfernstraßen; Bundesministerium für Verkehr und digitale Infrastruktur: Berlin, Germany, 2020. [Google Scholar]
- ASCE. 2021 Report Card for America’s Infrastructure—Bridges; ASCE: Reston, VA, USA, 2021. [Google Scholar]
- ASCE. 2025 Report Card for America’s Infrastructure—Bridges; ASCE: Reston, VA, USA, 2025. [Google Scholar]
- DIN. Bauwerksprüfung Nach DIN 1076—Bedeutung, Organisation, Kosten; DIN: Berlin, Germany, 2013. [Google Scholar]
- Phares, B.M.; Washer, G.A.; Rolander, D.D.; Graybeal, B.A.; Moore, M. Routine Highway Bridge Inspection Condition Documentation Accuracy and Reliability. J. Bridge Eng. 2004, 9, 403–413. [Google Scholar] [CrossRef]
- Koh, B.H.; Dyke, S.J. Structural Health Monitoring for Flexible Bridge Structures Using Correlation and Sensitivity of Modal Data. Comput. Struct. 2007, 85, 117–130. [Google Scholar] [CrossRef]
- Gao, K.; Zhang, Z.Y.; Weng, S.; Zhu, H.P.; Yu, H.; Peng, T.J. Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring. Appl. Sci. 2022, 12, 9750. [Google Scholar] [CrossRef]
- Jiao, P.C.; Egbe, K.J.I.; Xie, Y.W.; Nazar, A.M.; Alavi, A.H. Piezoelectric Sensing Techniques in Structural Health Monitoring: A State-of-the-Art Review. Sensors 2020, 20, 3730. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.C.; Ren, Y.H.; He, S.M.; Gao, Z.; Li, B.; Song, J.Y. A Review of Methods and Applications in Structural Health Monitoring (SHM) for Bridges. Measurement 2025, 245, 116575. [Google Scholar] [CrossRef]
- Johnson Singh, M.; Choudhary, S.; Chen, W.-B.; Wu, P.-C.; Kumar Goyal, M.; Rajput, A.; Borana, L. Applications of Fibre Bragg Grating Sensors for Monitoring Geotechnical Structures: A Comprehensive Review. Measurement 2023, 218, 113171. [Google Scholar] [CrossRef]
- Bremer, K.; Wollweber, M.; Weigand, F.; Rahlves, M.; Kuhne, M.; Helbig, R.; Roth, B. Fibre Optic Sensors for the Structural Health Monitoring of Building Structures. Procedia Technol. 2016, 26, 524–529. [Google Scholar] [CrossRef]
- Gharehbaghi, V.R.; Farsangi, E.N.; Noori, M.; Yang, T.Y.; Li, S.F.; Nguyen, A.; Málaga-Chuquitaype, C.; Gardoni, P.; Mirjalili, S. A Critical Review on Structural Health Monitoring: Definitions, Methods, and Perspectives. Arch. Comput. Methods Eng. 2022, 29, 2209–2235. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. A Review of the Piezoelectric Electromechanical Impedance Based Structural Health Monitoring Technique for Engineering Structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [PubMed]
- Katam, R.; Pasupuleti, V.D.K.; Kalapatapu, P. A Review on Structural Health Monitoring: Past to Present. Innov. Infrastruct. Solut. 2023, 8, 248. [Google Scholar] [CrossRef]
- Moreno-Gomez, A.; Perez-Ramirez, C.A.; Dominguez-Gonzalez, A.; Valtierra-Rodriguez, M.; Chavez-Alegria, O.; Amezquita-Sanchez, J.P. Sensors Used in Structural Health Monitoring. Arch. Comput. Methods Eng. 2018, 25, 901–918. [Google Scholar] [CrossRef]
- Hassani, S.; Dackermann, U. A Systematic Review of Advanced Sensor Technologies for Non-Destructive Testing and Structural Health Monitoring. Sensors 2023, 23, 2204. [Google Scholar] [CrossRef] [PubMed]
- Desbazeille, N.C.; Saguin Sprynski, M. Monitoring of Bridges by Using Static and Dynamic Data from MEMS Accelerometers; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Komarizadehasl, S.; Komary, M.; Alahmad, A.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. A Novel Wireless Low-Cost Inclinometer Made from Combining the Measurements of Multiple MEMS Gyroscopes and Accelerometers. Sensors 2022, 22, 5605. [Google Scholar] [CrossRef] [PubMed]
- Bono, F.M.; Polinelli, A.; Radicioni, L.; Benedetti, L.; Castelli-Dezza, F.; Cinquemani, S.; Belloli, M. Wireless Accelerometer Architecture for Bridge SHM: From Sensor Design to System Deployment. Future Internet 2025, 17, 29. [Google Scholar] [CrossRef]
- Ribeiro, R.R.; Lameiras, R.D. Evaluation of Low-Cost MEMS Accelerometers for SHM: Frequency and Damping Identification of Civil Structures. Lat. Am. J. Solids Struct. 2019, 16, e203. [Google Scholar] [CrossRef]
- Sonnessa, A.; Macellari, M. Dynamic Monitoring of a Railway Steel Bridge with MEMS Accelerometers: First Results on the Case Study of Portella. In Proceedings of the Computational Science and Its Applications—ICCSA 2022 Workshops, Part. III, Malaga, Spain, 4–7 July 2022; Volume 13379, pp. 354–368. [Google Scholar] [CrossRef]
- Zonzini, F.; Malatesta, M.M.; Bogomolov, D.; Testoni, N.; Marzani, A.; De Marchi, L. Vibration-Based SHM with Upscalable and Low-Cost Sensor Networks. IEEE Trans. Instrum. Meas. 2020, 69, 7990–7998. [Google Scholar] [CrossRef]
- Suhartomo, A.; Simatupang, J.W.; Widjaja, B.; Gapsari, F. Feasibility Study on Structural Health Monitoring Systems Using Fiber-Optic Sensors (FOS) Technology for Transportation Infrastructures in Indonesia. In Proceedings of the International Conference on Mechanical Engineering Research and Application, Malang, Indonesia, 23–25 October 2018; IOP Publishing: Philadelphia, PA, USA, 2019; Volume 494, p. 012054. [Google Scholar] [CrossRef]
- Khankalantary, S.; Ranjbaran, S.; Mohammadkhani, H. Simultaneous Compensation of Systematic Errors of a Low-Cost MEMS Triaxial Accelerometer and Its Temperature Dependency Without Accurate Laboratory Equipment. Sens. Rev. 2021, 41, 208–215. [Google Scholar] [CrossRef]
- Bernal-Polo, P.; Martínez-Barberá, H. Temperature-Dependent Calibration of Triaxial Sensors: Algorithm, Prototype, and Some Results. IEEE Sens. J. 2020, 20, 876–884. [Google Scholar] [CrossRef]
- Yuan, B.; Tang, Z.F.; Zhang, P.F.; Lv, F.Z. Thermal Calibration of Triaxial Accelerometer for Tilt Measurement. Sensors 2023, 23, 2105. [Google Scholar] [CrossRef] [PubMed]
- Galdino, E.; Cury, A. DEVELOPMENT OF LOW-COST WIRELESS ACCELEROMETER FOR STRUCTURAL DYNAMIC MONITORING. Rev. Interdiscip. Pesqui. Eng. 2017, 2, 10–19. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. Thermal Compensation of Low-Cost MEMS Accelerometers for Tilt Measurements. Sensor 2018, 18, 2536. [Google Scholar] [CrossRef] [PubMed]
- De Simone, M.C.; Lorusso, A.; Santaniello, D. Predictive Maintenance and Structural Health Monitoring via IoT System. In Proceedings of the 2022 IEEE Workshop on Complexity in Engineering, Compeng, Florence, Italy, 18–20 July 2022. [Google Scholar] [CrossRef]
- Navabian, N.; Beskhyroun, S. Low-Cost and High-Performance Wireless Sensor Nodes for Structural Health Monitoring Applications. In Proceedings of the 9th European Workshop on Structural Health, Manchester, UK, 10–13 July 2018. [Google Scholar]
- Bhatta, S.; Dang, J. Use of IoT for Structural Health Monitoring of Civil Engineering Structures: A State-of-the-Art Review. Urban. Lifeline 2024, 2, 17. [Google Scholar] [CrossRef]
- Malik, H.; Khattak, K.S.; Wiqar, T.; Khan, Z.H.; Altamimi, A.B. Low Cost Internet of Things Platform for Structural Health Monitoring. In Proceedings of the 2019 22nd IEEE International Multi Topic Conference (INMIC), Islamabad, Pakistan, 29–30 November 2019; pp. 389–395. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Rapinski, J.; Tomaszewski, D.; Stepniak, K.; Geng, J.H.; Li, G.C. Integrating Low-Cost GNSS and MEMS Accelerometer for Precise Dynamic Displacement Monitoring. Measurement 2025, 242, 115798. [Google Scholar] [CrossRef]
- Qu, X.; Ding, X.; Xu, Y.L.; Yu, W. Real-time outlier detection in integrated GNSS and accelerometer structural health monitoring systems based on a robust multi-rate Kalman filter. J. Geod. 2023, 97, 38. [Google Scholar] [CrossRef]
- Niu, Y.; Li, J.; Zhou, S.; Liu, G.; Xiang, Y.; Zhang, H.; Shu, J. Dynamic displacement estimation and modal analysis of long-span bridges integrating multi-GNSS and acceleration measurements. J. Infrastruct. Preserv. Resil. 2023, 4, 9. [Google Scholar] [CrossRef]
- Omidalizarandi, M.; Heipke, C.; Neumann, I.; Müller, J.; Lienhart, W.; Sharifi, M.A. Robust Deformation Monitoring of Bridge Structures Using MEMS Accelerometers and Image-Assisted Total Stations. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, 2020. [Google Scholar]
- Faulkner, K.; Brownjohn, J.M.W.; Wang, Y.; Huseynov, F. Tracking Bridge Tilt Behaviour Using Sensor Fusion Techniques. J. Civ. Struct. Health Monit. 2020, 10, 543–555. [Google Scholar] [CrossRef]
- Yang, M.X.; Wu, J.; Zhang, Q.L. Inclination and Acceleration Data Fusion for Two-Dimensional Dynamic Displacements and Mode Shapes Identification of Super High-Rise Buildings Considering Time Delay. Mech. Syst. Signal Process. 2025, 223, 111938. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Liu, P.; Sohn, H. Structural displacement estimation by fusing vision camera and accelerometer using hybrid computer vision algorithm and adaptive multi-rate Kalman filter. Autom. Constr. 2022, 140, 104338. [Google Scholar] [CrossRef]
- Liu, Q.; Kong, F.; Chen, X.; Wang, G.; Li, K. Improving the Accuracy of Dynamic Inclination Measurement by Machine Learning. Sci. Rep. 2024, 14, 25071. [Google Scholar] [CrossRef] [PubMed]
- Shoushtari, H.; Willemsen, T.; Sternberg, H. Supervised Learning Regression for Sensor Calibration. In Proceedings of the 2023 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 24–25 October 2023; pp. 1–20. [Google Scholar]
- Alves, V.H.M.; Alves, V.A.M.; Cury, A.A. Artificial Intelligence-Driven Structural Health Monitoring: Challenges, Progress, and Applications. In New Advances in Soft Computing in Civil Engineering: AI-Based Optimization and Prediction; Bekdaş, G., Nigdeli, S.M., Eds.; Springer Nature: Cham, Switzerland, 2024; pp. 149–166. ISBN 978-3-031-65976-8. [Google Scholar]
- Willemsen, T. Konzepteiner Multi-MEMS Für Die Bauwerksüberwachung. Allg. Vermess. 2022, 2022. [Google Scholar]
- Heykoop, I.; Hoult, N.; Woods, J.E.; Fernando, H. Development and Field Evaluation of a Low-Cost Bridge Bearing Movement Monitoring System. J. Civ. Struct. Health Monit. 2024, 14, 931–946. [Google Scholar] [CrossRef]
- Witte, B.; Sparla, P.; Blankenbach, J. Vermessungskunde Für Das Bauwesen Mit Grundlagen Des Building Information Modeling (BIM) Und Der Statistik; Wichmann: Offenbach, Germeny, 2020; ISBN 9783879076574. [Google Scholar]
- Eichinger-Vill, E.-M.; Kollegger, J.; Aigner, F.; Ramberger, G. Überwachung, Prüfung, Bewertung Und Beurteilung von Brücken. In Handbuch Brücken: Entwerfen, Konstruieren, Berechnen, Bauen und Erhalten; Mehlhorn, G., Ed.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1009–1068. ISBN 978-3-642-04423-6. [Google Scholar]
- Aggarwal, P.; El-Sheimy, N.; Noureldin, A.; Syed, Z. MEMS-Based Integrated Navigation; Artech: Norwood, MA, USA, 2010; p. 1. ISBN 9781608070442. [Google Scholar]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A New Multi-Position Calibration Method for MEMS Inertial Navigation Systems. Meas. Sci. Technol. 2007, 18, 1897–1907. [Google Scholar] [CrossRef]
- Hemerly, E.M. MEMS IMU Stochastic Error Modelling. Syst. Sci. Control Eng. 2017, 5, 1–8. [Google Scholar] [CrossRef]
- Li, M.; Ma, Z.; Zhang, T.; Jin, Y.; Ye, Z.; Zheng, X.; Jin, Z. Temperature Bias Drift Phase-Based Compensation for a MEMS Accelerometer with Stiffness-Tuning Double-Sided Parallel Plate Capacitors. Nanomanufacturing Metrol. 2023, 6, 22. [Google Scholar] [CrossRef]
- Ko, H.; Cho, D.I. Highly Programmable Temperature Compensated Readout Circuit for Capacitive Microaccelerometer. Sens. Actuators A-Phys. 2010, 158, 72–83. [Google Scholar] [CrossRef]
- Kose, T.; Azgin, K.; Akin, T. Temperature Compensation of a Capacitive Mems Accelerometer by Using a Mems Oscillator. In Proceedings of the 2016 3rd IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016; pp. 33–36. [Google Scholar]
- Zhang, H.C.; Wei, X.Y.; Gao, Y.; Cretu, E. Analytical Study and Thermal Compensation for Capacitive MEMS Accelerometer with Anti-Spring Structure. J. Microelectromech. Syst. 2020, 29, 1389–1400. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (1σ) | Maximum Inclination Error | ||||||||||
| S 1 | S 2 | S 3 | S 4 | S 1 | S 2 | S 3 | S 4 | ||||
| A | x | 0.249 | 0.259 | 0.282 | 0.086 | 0.093 | 0.739 | 0.937 | 0.809 | 0.469 | 0.253 |
| y | 0.177 | 0.763 | 0.402 | 0.773 | 0.244 | 0.981 | 2.156 | 1.418 | 2.008 | 0.547 | |
| B | x | 0.048 | 0.143 | 0.057 | 0.050 | 0.008 | 0.213 | 0.568 | 0.246 | 0.217 | 0.045 |
| kx | 5.178 | 1.810 | 4.988 | 1.706 | 11.936 | 3.475 | 1.640 | 3.286 | 2.164 | 5.616 | |
| y | 0.099 | 0.162 | 0.043 | 0.024 | 0.009 | 0.431 | 0.638 | 0.246 | 0.156 | 0.067 | |
| ky | 1.779 | 4.714 | 9.412 | 32.608 | 28.080 | 2.278 | 3.370 | 5.775 | 12.863 | 8.153 | |
| C | x | 0.015 | 0.021 | 0.017 | 0.017 | 0.006 | 0.105 | 0.130 | 0.127 | 0.114 | 0.042 |
| kx | 17.702 | 12.407 | 18.418 | 5.850 | 16.333 | 7.016 | 7.201 | 6.365 | 4.113 | 6.017 | |
| y | 0.038 | 0.039 | 0.028 | 0.023 | 0.008 | 0.195 | 0.165 | 0.144 | 0.128 | 0.059 | |
| ky | 4.657 | 20.461 | 15.399 | 33.310 | 33.931 | 5.037 | 13.108 | 9.823 | 15.724 | 9.289 | |
| D | x | 0.014 | 0.021 | 0.016 | 0.015 | 0.006 | 0.102 | 0.124 | 0.106 | 0.112 | 0.038 |
| kx | 17.702 | 12.231 | 18.064 | 5.584 | 16.333 | 7.257 | 7.555 | 7.616 | 4.183 | 6.598 | |
| y | 0.038 | 0.037 | 0.026 | 0.023 | 0.007 | 0.194 | 0.149 | 0.130 | 0.125 | 0.055 | |
| ky | 4.633 | 20.461 | 15.399 | 33.167 | 33.014 | 5.053 | 14.481 | 10.886 | 16.038 | 9.911 | |
| E | x | 0.013 | 0.018 | 0.016 | 0.015 | 0.006 | 0.105 | 0.144 | 0.107 | 0. 112 | 0.040 |
| kx | 18.909 | 14.817 | 18.064 | 5.584 | 16.927 | 7.040 | 6.488 | 7.552 | 4.183 | 6.255 | |
| y | 0.035 | 0. 036 | 0.026 | 0.023 | 0.007 | 0.217 | 0.166 | 0.132 | 0. 125 | 0.054 | |
| ky | 5.087 | 21.438 | 15.399 | 33.167 | 34.900 | 4.528 | 13.013 | 10.754 | 16.050 | 10.057 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giermann, S.; Willemsen, T.; Blankenbach, J. Structural Monitoring Without a Budget—Laboratory Results and Field Report on the Use of Low-Cost Acceleration Sensors. Sensors 2025, 25, 4543. https://doi.org/10.3390/s25154543
Giermann S, Willemsen T, Blankenbach J. Structural Monitoring Without a Budget—Laboratory Results and Field Report on the Use of Low-Cost Acceleration Sensors. Sensors. 2025; 25(15):4543. https://doi.org/10.3390/s25154543
Chicago/Turabian StyleGiermann, Sven, Thomas Willemsen, and Jörg Blankenbach. 2025. "Structural Monitoring Without a Budget—Laboratory Results and Field Report on the Use of Low-Cost Acceleration Sensors" Sensors 25, no. 15: 4543. https://doi.org/10.3390/s25154543
APA StyleGiermann, S., Willemsen, T., & Blankenbach, J. (2025). Structural Monitoring Without a Budget—Laboratory Results and Field Report on the Use of Low-Cost Acceleration Sensors. Sensors, 25(15), 4543. https://doi.org/10.3390/s25154543