

Rapid and Accurate Shape-Sensing Method Using a Multi-Core Fiber Bragg Grating-Based Optical Fiber
 ,
,  , and
, and
Abstract
Highlights
- Novel analytical algorithm for multi-core FBG-based shape sensing using second-order polynomials;
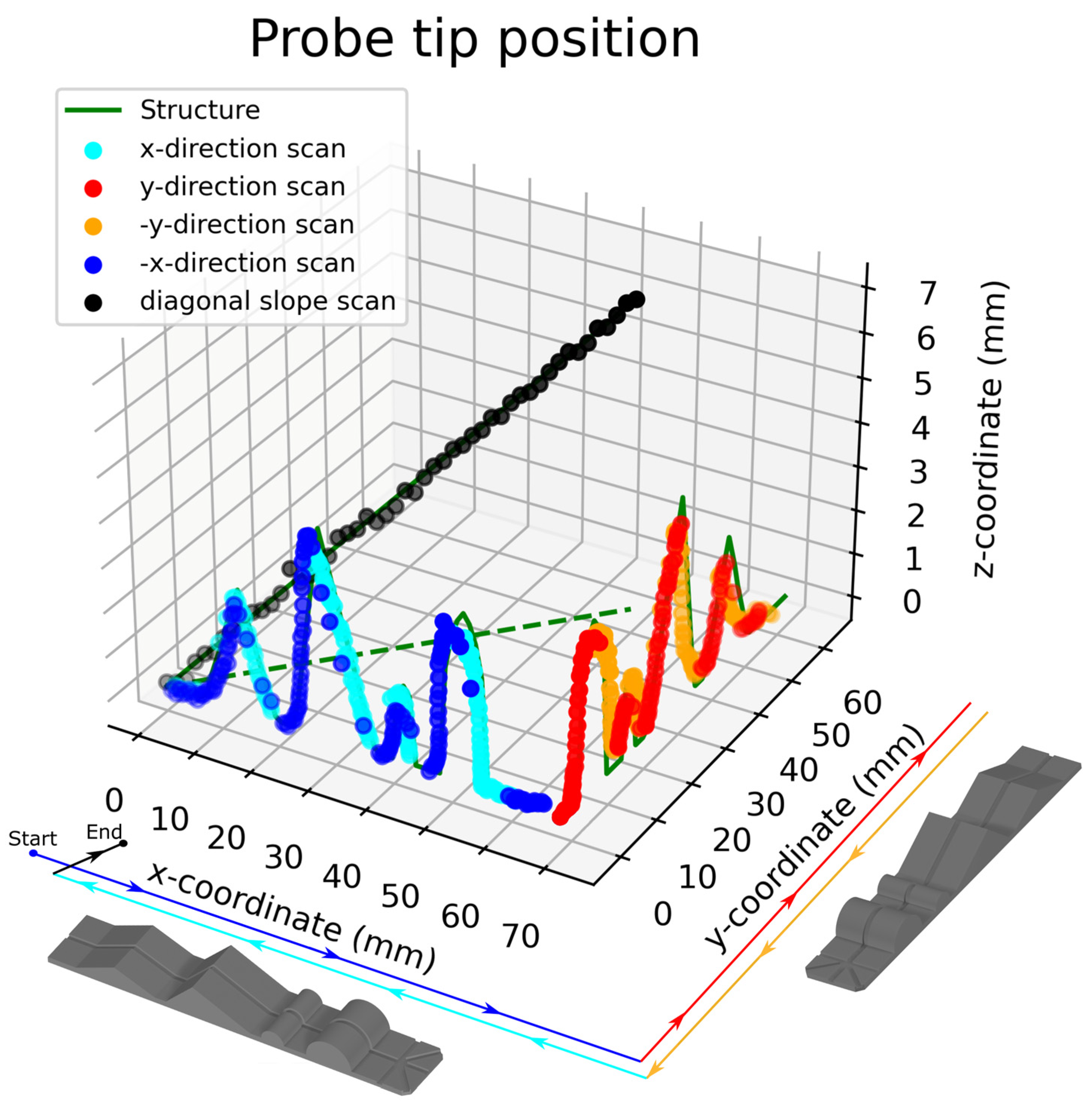
- Experimental validation, with shape-sensing fiber tip-positioning accuracy better than 2.5%.
- Low computational requirements for high-speed and high-accuracy algorithm;
- Scalable method to multiple curvature-sensing nodes, ideal for high accuracy, short length (<5 m) navigation, or surface mapping applications.
Abstract

1. Introduction
2. Materials and Methods
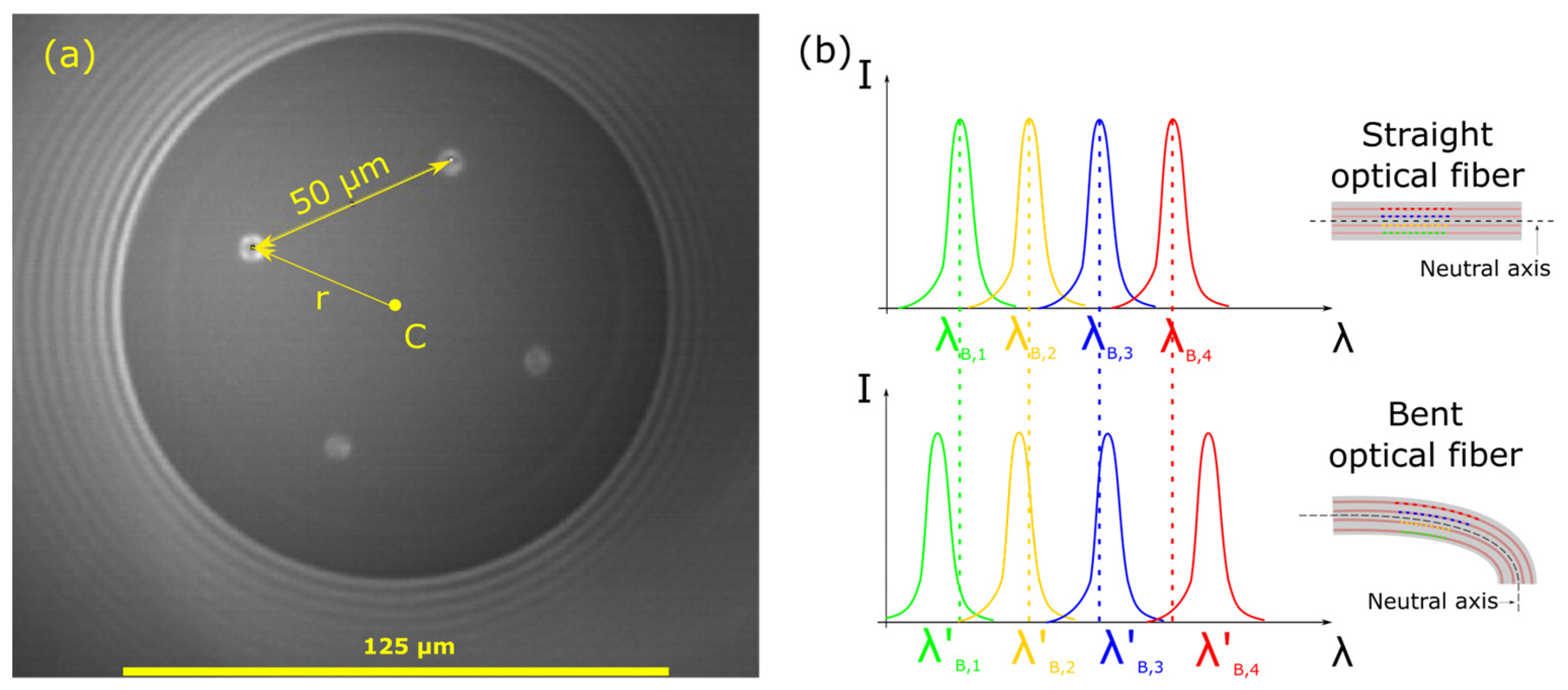
2.1. Multi-Core Fiber and FBG Sensor Fabrication
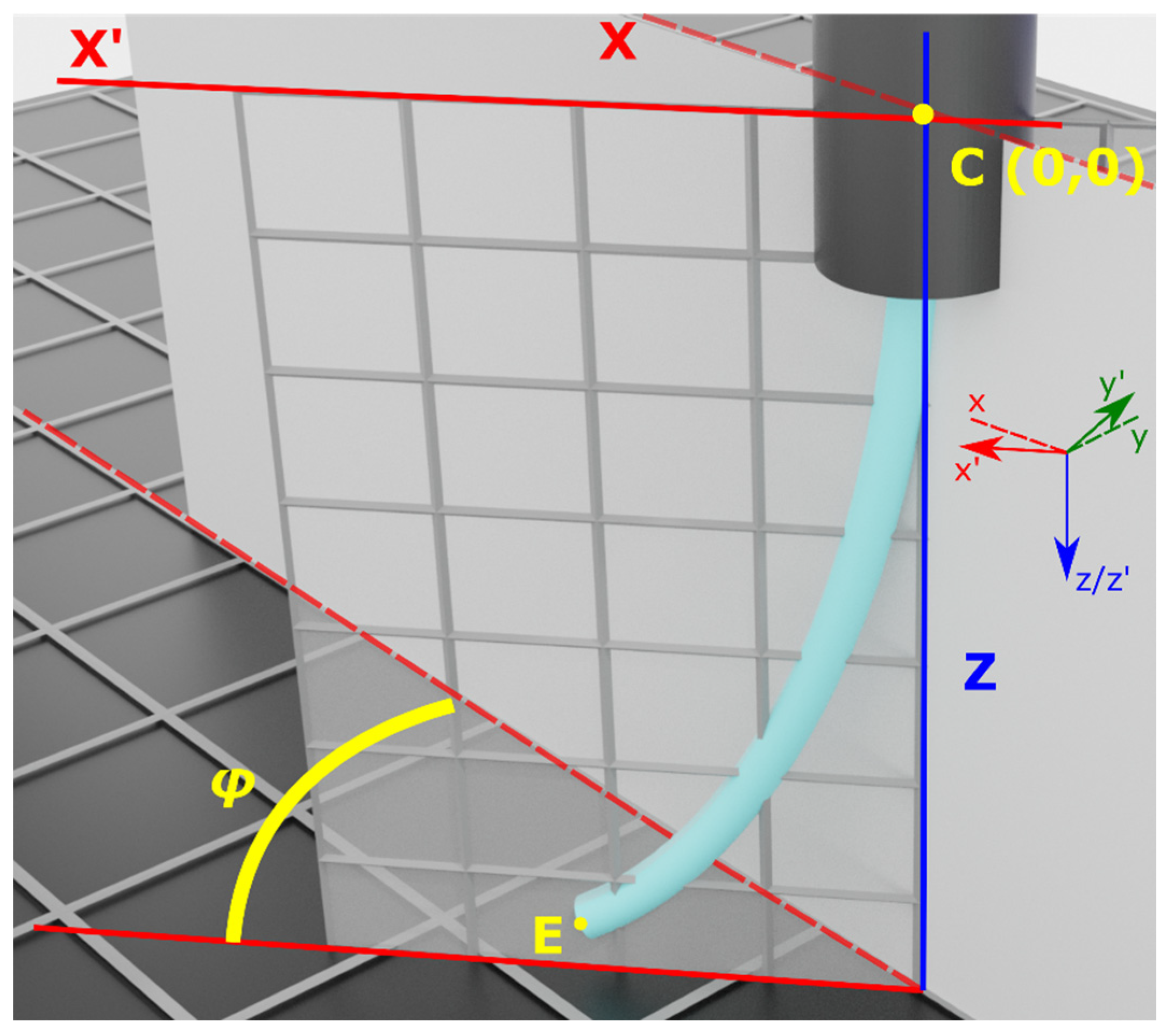
2.2. Experimental Setup and Tip Position Calibration
3. Optical Fiber Tip Coordinate Determination Algorithm and Validation
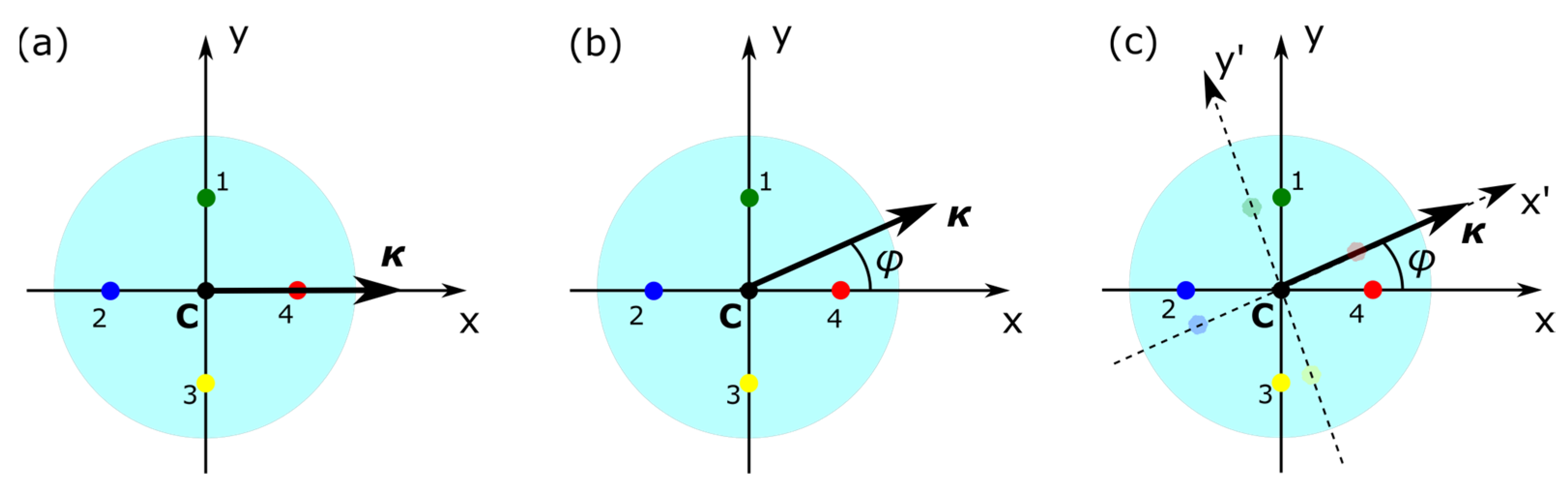
3.1. Curvature Vector Calculation
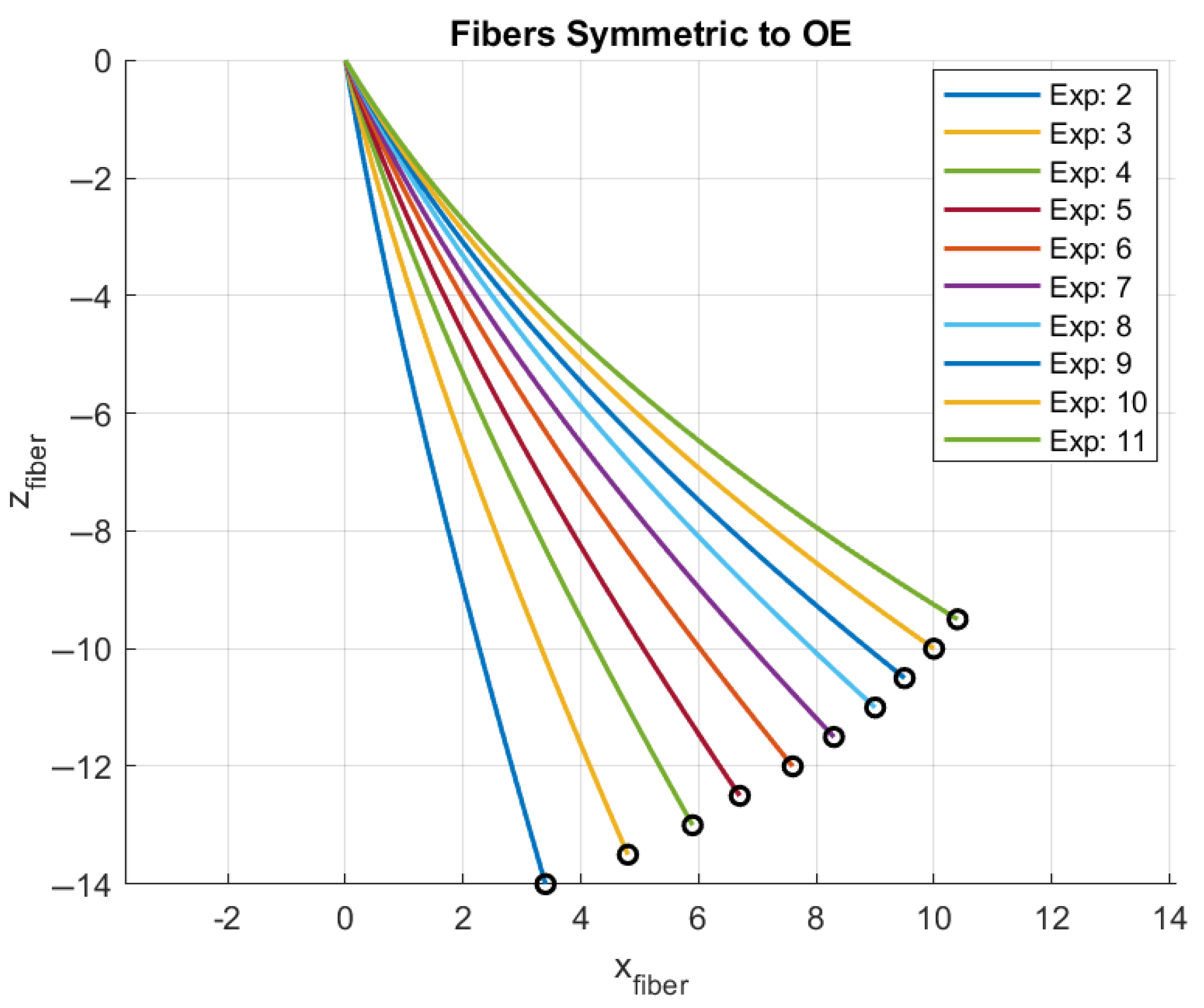
3.2. Generalization via Exponential Fit
3.3. Tip Coordinate Extraction
3.4. Exponential Fit Generalization
- Measurement of the Bragg wavelength shifts with respect to the initial (resting) position;
- Calculation of the curvature vector κ using Equation (3);
- Calculation of the bend angle direction φ using Equation (5);
- Application of Equation (18) along with the fit parameters from Table 3 to determine the polynomial coefficients α1 and α2 at curvature κ;
- Use of Equation (16) to acquire the coordinate Xe (numerical solution or analytical approximation);
- Application of coordinate Xe in Equation (14) to acquire coordinate Ze;
- Use of the calculated angle φ in order to acquire coordinate Ye using trigonometry and the Xe coordinate.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CSS | Conventional Shape Sensor |
| FOSS | Fiber Optic Shape Sensor |
| FBG | Fiber Bragg Grating |
References
- Jäckle, S.; Eixmann, T.; Schulz-Hildebrandt, H.; Hüttmann, G.; Pätz, T. Fiber Optical Shape Sensing of Flexible Instruments for Endovascular Navigation. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 2137–2145. [Google Scholar] [CrossRef] [PubMed]
- Glisic, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Galloway, K.C.; Chen, Y.; Templeton, E.; Rife, B.; Godage, I.S.; Barth, E.J. Fiber Optic Shape Sensing for Soft Robotics. Soft Robot. 2019, 6, 671–684. [Google Scholar] [CrossRef] [PubMed]
- Monet, F.; Sefati, S.; Lorre, P.; Poiffaut, A.; Kadoury, S.; Armand, M.; Iordachita, I.; Kashyap, R. High-Resolution Optical Fiber Shape Sensing of Continuum Robots: A Comparative Study. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8877–8883. [Google Scholar]
- Lopez-Higuera, J.M.; Rodriguez Cobo, L.; Quintela Incera, A.; Cobo, A. Fiber Optic Sensors in Structural Health Monitoring. J. Light. Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- Freydin, M.; Rattner, M.K.; Raveh, D.E.; Kressel, I.; Davidi, R.; Tur, M. Fiber-Optics-Based Aeroelastic Shape Sensing. AIAA J. 2019, 57, 5094–5103. [Google Scholar] [CrossRef]
- Nazeer, N. Fibre Optic Shape Sensing and Load Monitoring of Adaptive Aerospace Structures. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar]
- Amanzadeh, M.; Aminossadati, S.M.; Kizil, M.S.; Rakić, A.D. Recent Developments in Fibre Optic Shape Sensing. Measurement 2018, 128, 119–137. [Google Scholar] [CrossRef]
- Gentile, C.; Bernardini, G. Radar-Based Measurement of Deflections on Bridges and Large Structures. Eur. J. Environ. Civ. Eng. 2010, 14, 495–516. [Google Scholar] [CrossRef]
- Choi, S.; Kim, B.; Lee, H.; Kim, Y.; Park, H. A Deformed Shape Monitoring Model for Building Structures Based on a 2D Laser Scanner. Sensors 2013, 13, 6746–6758. [Google Scholar] [CrossRef] [PubMed]
- Floris, I.; Adam, J.M.; Calderón, P.A.; Sales, S. Fiber Optic Shape Sensors: A Comprehensive Review. Opt. Lasers Eng. 2021, 139, 106508. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, C.; Liu, K.; Jiang, J.; Yang, D.; Pan, G.; Pu, Z.; Liu, T. Distributed Optical Fiber Sensors Based on Optical Frequency Domain Reflectometry: A review. Sensors 2018, 18, 1072. [Google Scholar] [CrossRef] [PubMed]
- Beisenova, A.; Issatayeva, A.; Iordachita, I.; Blanc, W.; Molardi, C.; Tosi, D. Distributed Fiber Optics 3D Shape Sensing by Means of High Scattering NP-Doped Fibers Simultaneous Spatial Multiplexing. Opt. Express 2019, 27, 22074. [Google Scholar] [CrossRef] [PubMed]
- Ukil, A.; Braendle, H.; Krippner, P. Distributed Temperature Sensing: Review of Technology and Applications. IEEE Sens. J. 2012, 12, 885–892. [Google Scholar] [CrossRef]
- Lally, E.M.; Reaves, M.; Horrell, E.; Klute, S.; Froggatt, M.E. Fiber Optic Shape Sensing for Monitoring of Flexible Structures. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2012; Tomizuka, M., Yun, C.-B., Lynch, J.P., Eds.; SPIE: San Diego, CA, USA, 2012; p. 83452Y. [Google Scholar]
- Duncan, R.G.; Froggatt, M.E.; Kreger, S.T.; Seeley, R.J.; Gifford, D.K.; Sang, A.K.; Wolfe, M.S. High-Accuracy Fiber-Optic Shape Sensing. In Sensor Systems and Networks: Phenomena, Technology, and Applications for NDE and Health Monitoring 2007; Peters, K.J., Ed.; SPIE: San Diego, CA, USA, 2007; p. 65301S. [Google Scholar]
- Leal-Junior, A.; Macedo, L.; Avellar, L.; Frizera, A. Elastomer-Embedded Multiplexed Optical Fiber Sensor System for Multiplane Shape Reconstruction. Sensors 2023, 23, 994. [Google Scholar] [CrossRef] [PubMed]
- Gander, M.; Macrae, D.; Galliot, E.; McBride, R.; Jones, J.; Blanchard, P.; Burnett, J.; Greenaway, A.; Inci, M. Two-Axis Bend Measurement Using Multicore Optical Fibre. Opt. Commun. 2000, 182, 115–121. [Google Scholar] [CrossRef]
- Sahota, J.K.; Gupta, N.; Dhawan, D. Fiber Bragg Grating Sensors for Monitoring of Physical Parameters: A Comprehensive Review. Opt. Eng. 2020, 59, 60901. [Google Scholar] [CrossRef]
- Kashyap, R. Fiber Bragg Gratings; Academic Press: Burlington, MA, USA, 2009. [Google Scholar]
- Lo Presti, D.; Massaroni, C.; Jorge Leitao, C.S.; De Fatima Domingues, M.; Sypabekova, M.; Barrera, D.; Floris, I.; Massari, L.; Oddo, C.M.; Sales, S.; et al. Fiber Bragg Gratings for Medical Applications and Future Challenges: A Review. IEEE Access 2020, 8, 156863–156888. [Google Scholar] [CrossRef]
- Park, Y.-L.; Elayaperumal, S.; Daniel, B.; Ryu, S.C.; Shin, M.; Savall, J.; Black, R.J.; Moslehi, B.; Cutkosky, M.R. Real-Time Estimation of 3-D Needle Shape and Deflection for MRI-Guided Interventions. IEEEASME Trans. Mechatron. 2010, 15, 906–915. [Google Scholar] [CrossRef] [PubMed]
- Sefati, S.; Hegeman, R.; Alambeigi, F.; Iordachita, I.; Armand, M. FBG-Based Position Estimation of Highly Deformable Continuum Manipulators: Model-Dependent vs. Data-Driven Approaches. In Proceedings of the 2019 International Symposium on Medical Robotics (ISMR), Atlanta, GA, USA, 3–5 April 2019; pp. 1–6. [Google Scholar]
- Alambeigi, F.; Pedram, S.A.; Speyer, J.L.; Rosen, J.; Iordachita, I.; Taylor, R.H.; Armand, M. Scade: Simultaneous Sensor Calibration and Deformation Estimation of Fbg-Equipped Unmodeled Continuum Manipulators. IEEE Trans. Robot. 2019, 36, 222–239. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhang, R.; Chen, W.; Liang, X.; Pfeifer, R. Shape Detection Algorithm for Soft Manipulator Based on Fiber Bragg Gratings. IeeeAsme Trans. Mechatron. 2016, 21, 2977–2982. [Google Scholar] [CrossRef]
- Roesthuis, R.J.; Kemp, M.; van den Dobbelsteen, J.J.; Misra, S. Three-Dimensional Needle Shape Reconstruction Using an Array of Fiber Bragg Grating Sensors. IEEEASME Trans. Mechatron. 2013, 19, 1115–1126. [Google Scholar] [CrossRef]
- Yi, X.; Qian, J.; Shen, L.; Zhang, Y.; Zhang, Z. An Innovative 3D Colonoscope Shape Sensing Sensor Based on FBG Sensor Array. In Proceedings of the 2007 International Conference on Information Acquisition, Seogwipo-si, Republic of Korea, 8–11 July 2007; pp. 227–232. [Google Scholar]
- Lu, Y.; Lu, B.; Li, B.; Guo, H.; Liu, Y. Robust Three-Dimensional Shape Sensing for Flexible Endoscopic Surgery Using Multi-Core FBG Sensors. IEEE Robot. Autom. Lett. 2021, 6, 4835–4842. [Google Scholar] [CrossRef]
- Henken, K.; Van Gerwen, D.; Dankelman, J.; Van Den Dobbelsteen, J. Accuracy of Needle Position Measurements Using Fiber Bragg Gratings. Minim. Invasive Ther. Allied Technol. 2012, 21, 408–414. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Yi, X.; Qian, J.; Zhang, Y.; Shen, L.; Wei, Y. Updated Shape Sensing Algorithm for Space Curves with FBG Sensors. Opt. Lasers Eng. 2020, 129, 106057. [Google Scholar] [CrossRef]
- Han, F.; He, Y.; Zhu, H.; Zhou, K. A Novel Catheter Shape-Sensing Method Based on Deep Learning with a Multi-Core Optical Fiber. Sensors 2023, 23, 7243. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, H.; Yuan, T.; Yuan, L. Multi-Core Fiber Bragg Grating and Its Sensing Application. Sensors 2024, 24, 4532. [Google Scholar] [CrossRef] [PubMed]
- Wolf, A.; Dostovalov, A.; Bronnikov, K.; Skvortsov, M.; Wabnitz, S.; Babin, S. Advances in Femtosecond Laser Direct Writing of Fiber Bragg Gratings in Multicore Fibers: Technology, Sensor and Laser Applications. Opto-Electron. Adv. 2022, 5, 210055. [Google Scholar] [CrossRef]
- Moore, J.P.; Rogge, M.D. Shape Sensing Using Multi-Core Fiber Optic Cable and Parametric Curve Solutions. Opt. Express 2012, 20, 2967. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Zhao, S.; Yang, C.; Tan, J. Parallel Transport Frame for Fiber Shape Sensing. IEEE Photonics J. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Paloschi, D.; Bronnikov, K.A.; Korganbayev, S.; Wolf, A.A.; Dostovalov, A.; Saccomandi, P. 3D Shape Sensing With Multicore Optical Fibers: Transformation Matrices Versus Frenet-Serret Equations for Real-Time Application. IEEE Sens. J. 2021, 21, 4599–4609. [Google Scholar] [CrossRef]
- Kashyap, R. Fiber Bragg Gratings, 2nd ed.; Academic Press: Burlington, MA, USA, 2010; ISBN 978-0-12-372579-0. [Google Scholar]
- Borrelli, N.; Miller, R. Determination of the Individual Strain-Optic Coefficients of Glass by an Ultrasonic Technique. Appl. Opt. 1968, 7, 745–750. [Google Scholar] [CrossRef] [PubMed]
- Kline, M. Calculus: An Intuitive and Physical Approach; Courier Corporation: North Chelmsford, MA, USA, 1998. [Google Scholar]
- Floater, M.S. Arc Length Estimation and the Convergence of Polynomial Curve Interpolation. BIT Numer. Math. 2005, 45, 679–694. [Google Scholar] [CrossRef]
- Gao, S.; Wang, H.; Chen, Y.; Wei, H.; Woyessa, G.; Bang, O.; Min, R.; Qu, H.; Caucheteur, C.; Hu, X. Point-by-Point Induced High Birefringence Polymer Optical Fiber Bragg Grating for Strain Measurement. Photonics 2023, 10, 91. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Xe | Ye | Ze | φ | |κ| | |
|---|---|---|---|---|---|
| mm | mm | mm | rad | ° | mm−1 |
| 0 | 0 | 0 | - | - | 0 |
| 3.5 | 0 | −0.5 | 0.095 | 5.43 | 0.022 |
| 5 | 0 | −1.0 | 0.072 | 4.14 | 0.031 |
| 6 | 0 | −1.5 | 0.099 | 5.72 | 0.038 |
| 7 | 0 | −2.0 | 0.088 | 5.05 | 0.045 |
| 7.8 | 0 | −2.5 | 0.082 | 4.71 | 0.050 |
| 8.5 | 0 | −3.0 | 0.063 | 3.61 | 0.057 |
| 9 | 0 | −3.5 | 0.049 | 2.81 | 0.061 |
| 9.5 | 0 | −4.0 | 0.057 | 3.27 | 0.066 |
| 10 | 0 | −4.5 | 0.047 | 2.68 | 0.068 |
| 10.5 | 0 | −5.0 | 0.051 | 2.93 | 0.073 |
| Xe | Ye | Ze | φ | |κ| | α1 | α2 | L |
|---|---|---|---|---|---|---|---|
| mm | mm | mm | ° | mm−1 | mm | ||
| 0 | 0 | 0 | - | 0 | - | - | 14.50 |
| 3.5 | 0 | −0.5 | 5.43 | 0.022 | 2.89 | 0.32 | 14.44 |
| 5 | 0 | −1.0 | 4.14 | 0.031 | 1.91 | 0.16 | 14.42 |
| 6 | 0 | −1.5 | 5.72 | 0.038 | 1.50 | 0.11 | 14.35 |
| 7 | 0 | −2.0 | 5.05 | 0.045 | 1.19 | 0.08 | 14.38 |
| 7.8 | 0 | −2.5 | 4.71 | 0.050 | 0.99 | 0.07 | 14.38 |
| 8.5 | 0 | −3.0 | 3.61 | 0.057 | 0.82 | 0.06 | 14.39 |
| 9 | 0 | −3.5 | 2.81 | 0.061 | 0.71 | 0.06 | 14.32 |
| 9.5 | 0 | −4.0 | 3.27 | 0.066 | 0.60 | 0.05 | 14.29 |
| 10 | 0 | −4.5 | 2.68 | 0.068 | 0.51 | 0.05 | 14.29 |
| 10.5 | 0 | −5.0 | 2.93 | 0.073 | 0.41 | 0.04 | 14.34 |
| Polynomial Coefficient | A0 Value | t0 Value | y0 Value |
|---|---|---|---|
| α1 | 6.914 | 43.05 | 0.189 |
| α2 | 1.950 | 90.09 | 0.048 |
| Structure | Structure Feature | Max Height (mm) | Measured Height (mm) | Tip Error % |
|---|---|---|---|---|
| Test structure 1 | Circle 1 | 3.5 | 3.44 | 1.6 |
| Circle 2 | 1.5 | 1.46 | 2.4 | |
| Triangle 1 | 4.5 | 4.40 | 2.0 | |
| Triangle 2 | 2.5 | 2.43 | 2.5 | |
| HMU letters | Mixed | 2.0 | 1.93–1.97 | <2.5 |
| ‘H’—horizontal line | 2.0 | missed | ||
| ‘U’—curved part | 1.76 (fiber bent) | 1.73 | 1.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Violakis, G.; Vardakis, N.; Zhang, Z.; Angelmahr, M.; Polygerinos, P. Rapid and Accurate Shape-Sensing Method Using a Multi-Core Fiber Bragg Grating-Based Optical Fiber. Sensors 2025, 25, 4494. https://doi.org/10.3390/s25144494
Violakis G, Vardakis N, Zhang Z, Angelmahr M, Polygerinos P. Rapid and Accurate Shape-Sensing Method Using a Multi-Core Fiber Bragg Grating-Based Optical Fiber. Sensors. 2025; 25(14):4494. https://doi.org/10.3390/s25144494
Chicago/Turabian StyleViolakis, Georgios, Nikolaos Vardakis, Zhenyu Zhang, Martin Angelmahr, and Panagiotis Polygerinos. 2025. "Rapid and Accurate Shape-Sensing Method Using a Multi-Core Fiber Bragg Grating-Based Optical Fiber" Sensors 25, no. 14: 4494. https://doi.org/10.3390/s25144494
APA StyleViolakis, G., Vardakis, N., Zhang, Z., Angelmahr, M., & Polygerinos, P. (2025). Rapid and Accurate Shape-Sensing Method Using a Multi-Core Fiber Bragg Grating-Based Optical Fiber. Sensors, 25(14), 4494. https://doi.org/10.3390/s25144494