
Time–Frequency Characteristics of Vehicle–Bridge Interaction System for Structural Damage Detection Using Multi-Synchrosqueezing Transform



Abstract
1. Introduction
2. Theory
2.1. Vehicle–Bridge Interaction Systems
2.1.1. VBI Modeling
2.1.2. Non-Stationary Dynamic Characteristics of the VBI System
2.1.3. Damage Simulation of Reinforced Concrete Bridges
2.2. Time-Varying Feature Extraction Using Synchrosqueezing Transform
2.2.1. Synchrosqueezing Transform (SST)
2.2.2. Multi-Synchrosqueezing Transform (MSST)
2.2.3. IF Extraction Using Ridge Detection
2.3. Validation of MSST
3. Numerical Study for Extracting Time-Varying Characteristics of VBI Systems
3.1. Time-Varying Characteristics of the VBI System
3.2. Parametric Analysis
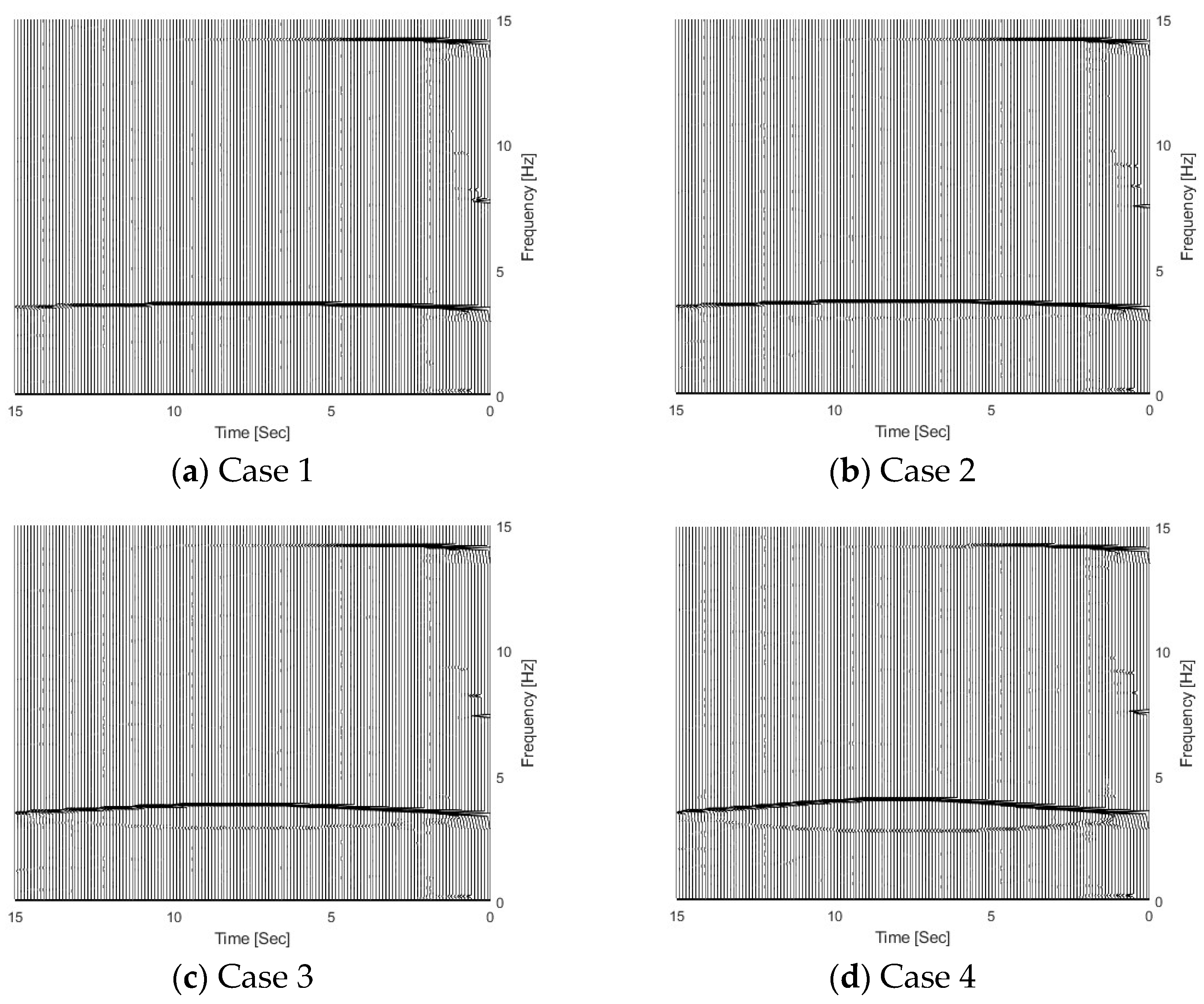
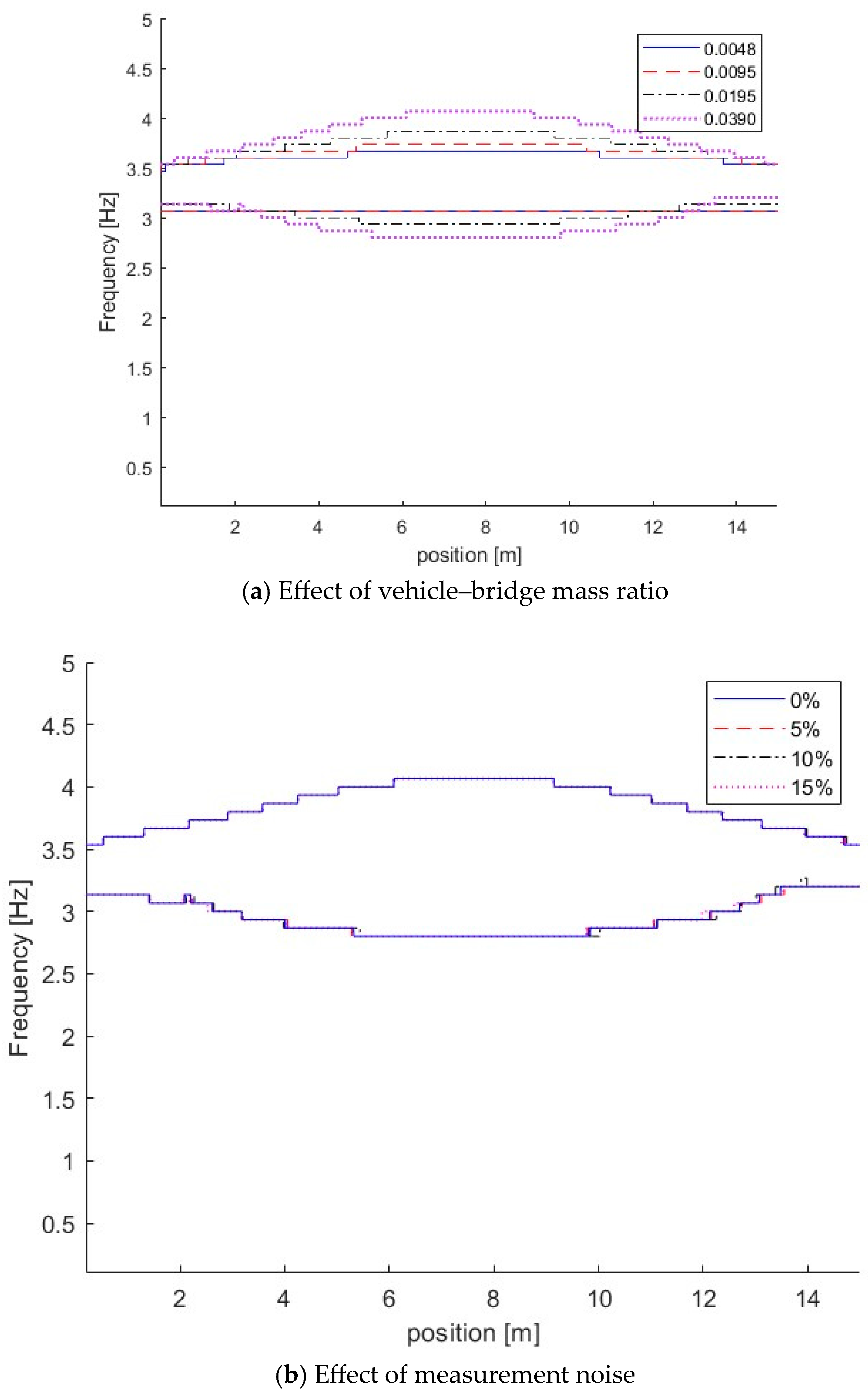
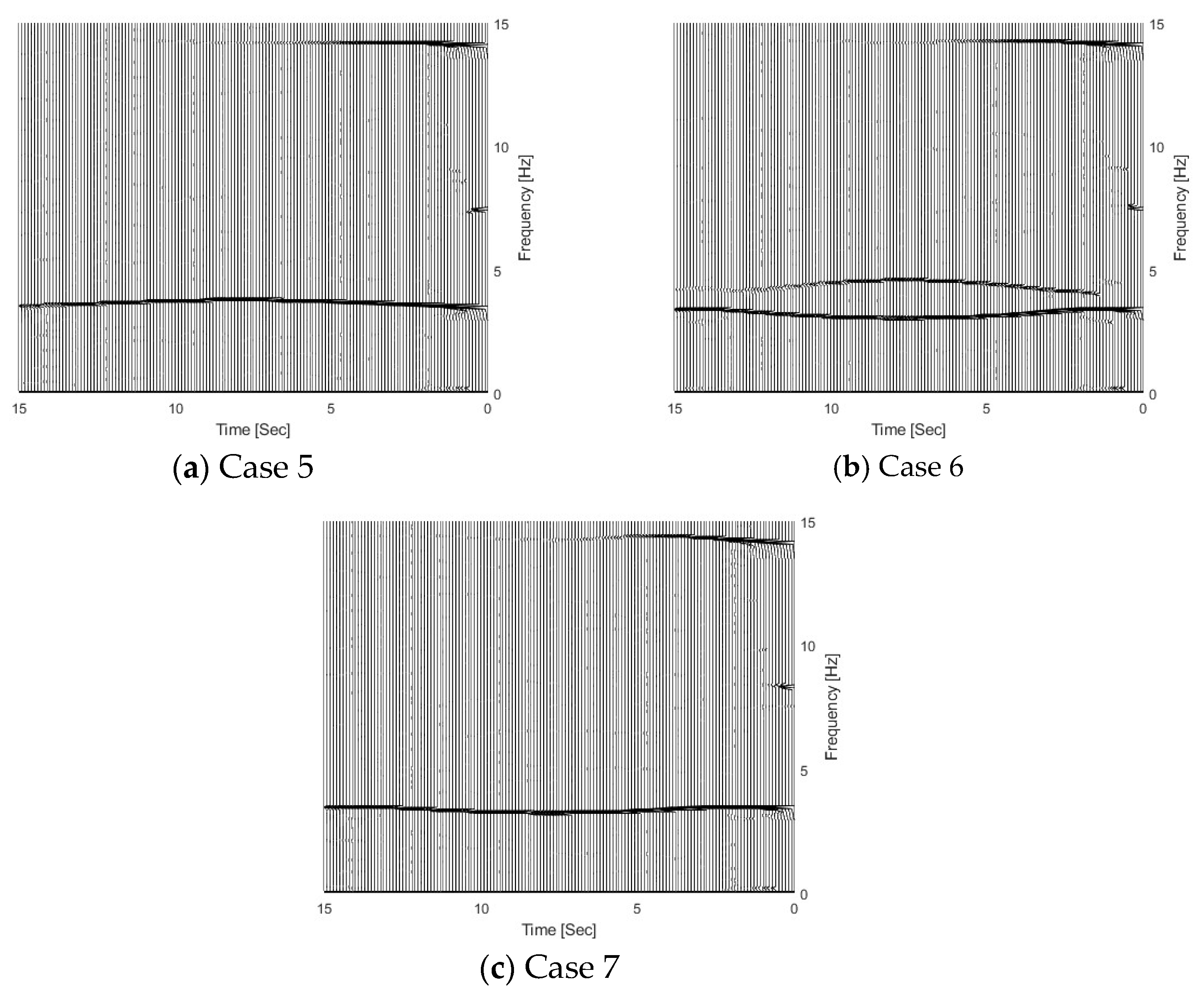
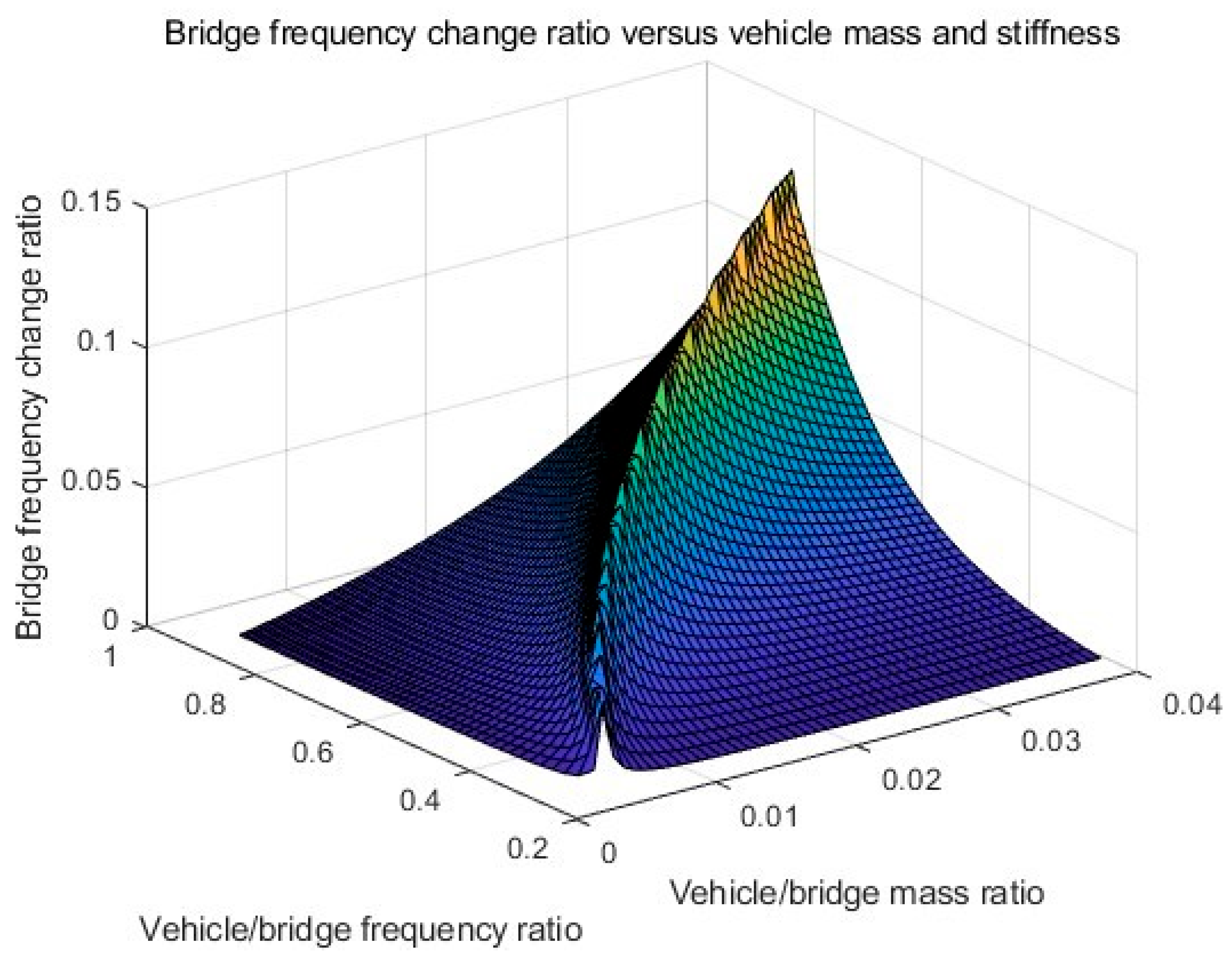
3.2.1. Effect of the Vehicle–Bridge Mass and Frequency Ratios
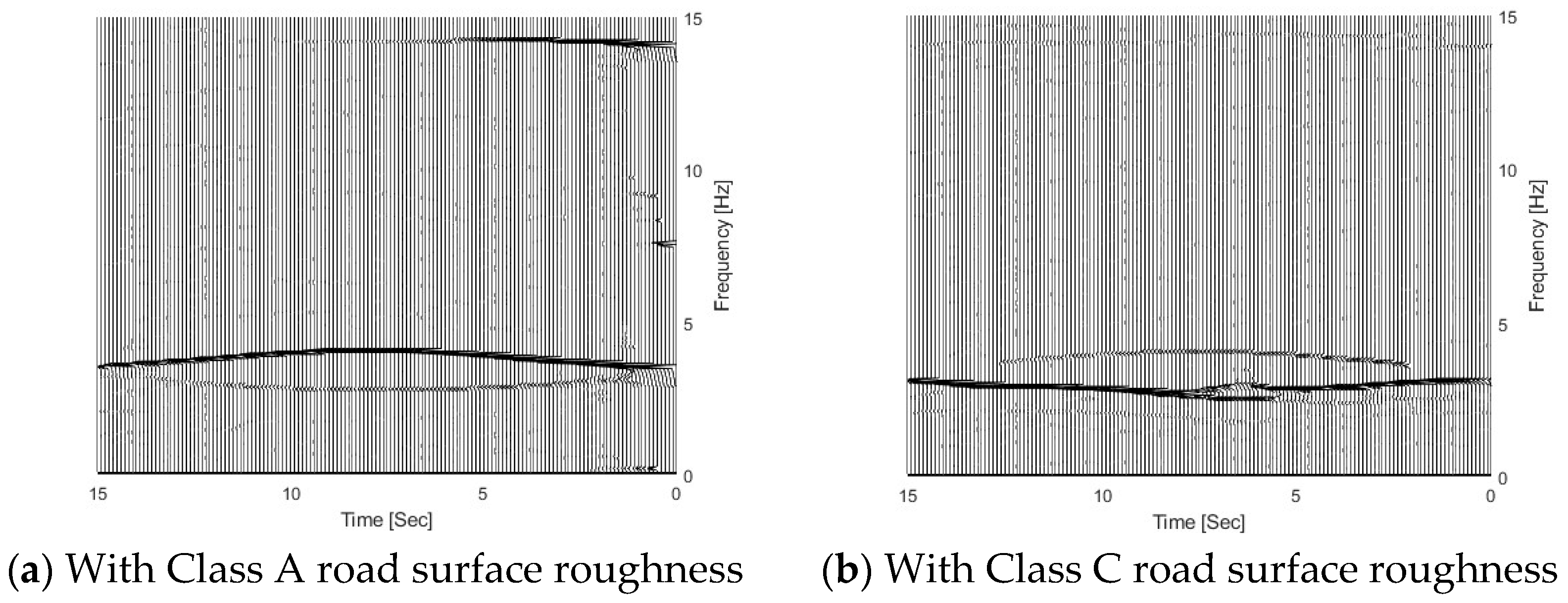
3.2.2. Effect of Road Surface Roughness
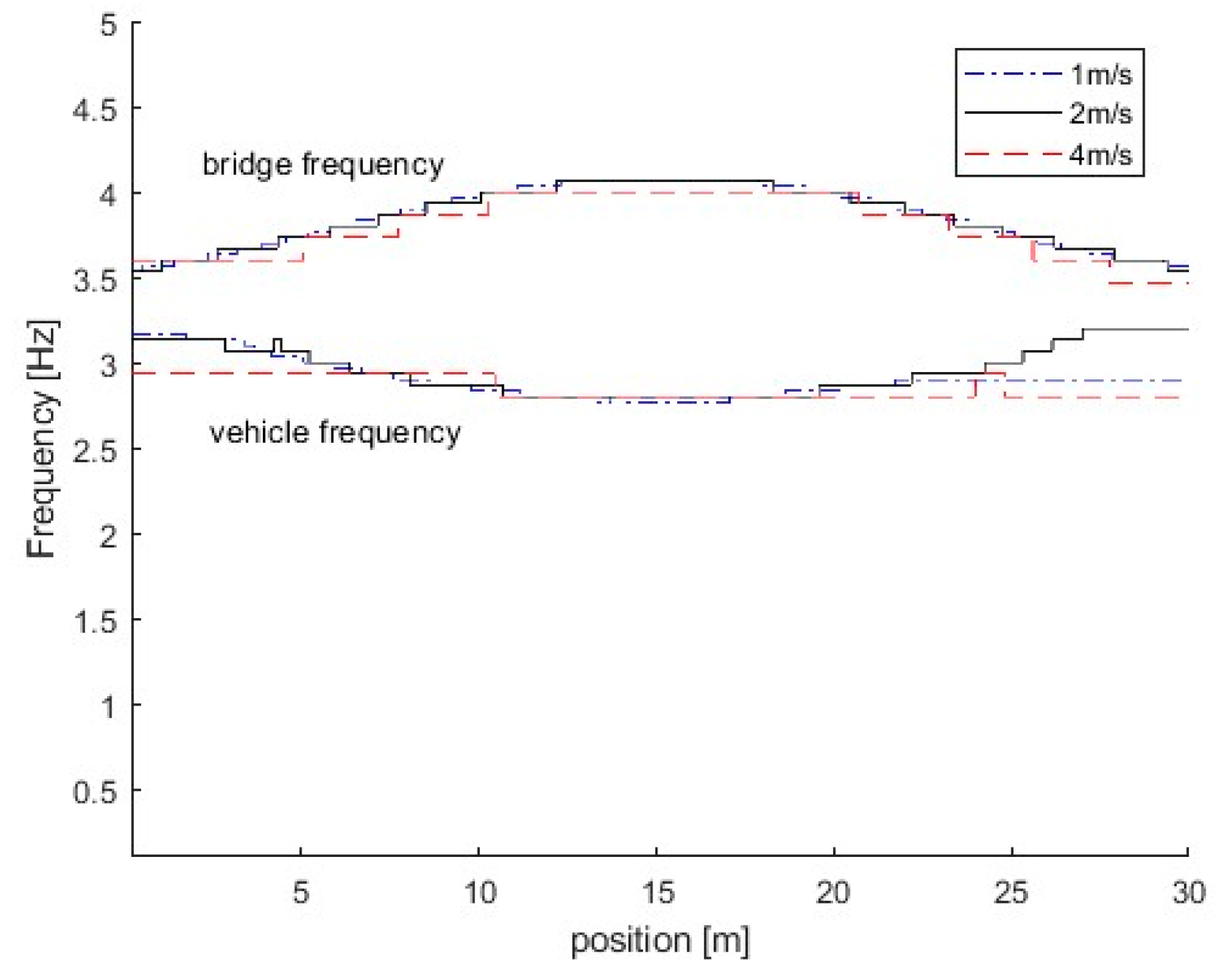
3.2.3. Effect of Vehicle Speed
3.3. Time-Varying Characteristics of VBI Systems with Bridge Damage
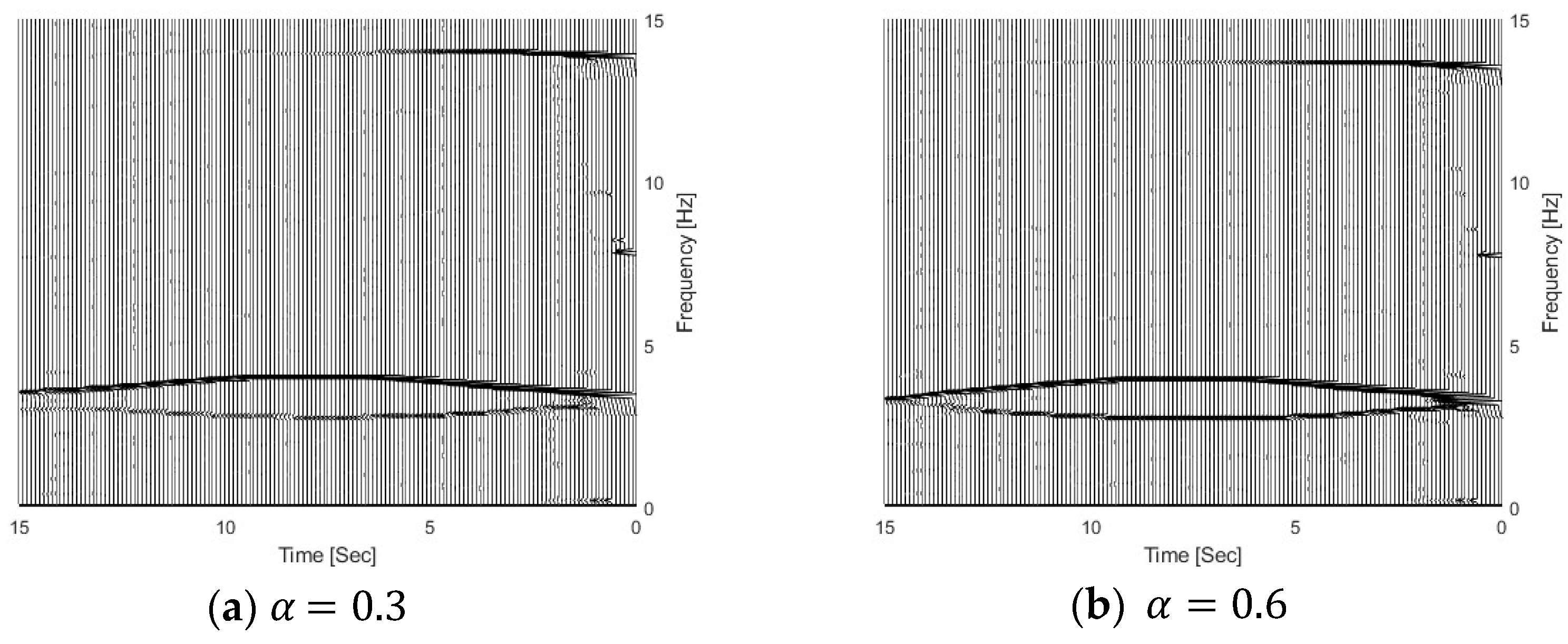
3.3.1. Effect of the Damage Severity Parameter
3.3.2. Effect of Damage Region Parameter
3.3.3. Effect of the Damage Location
4. Experimental Study
4.1. Experimental Setup
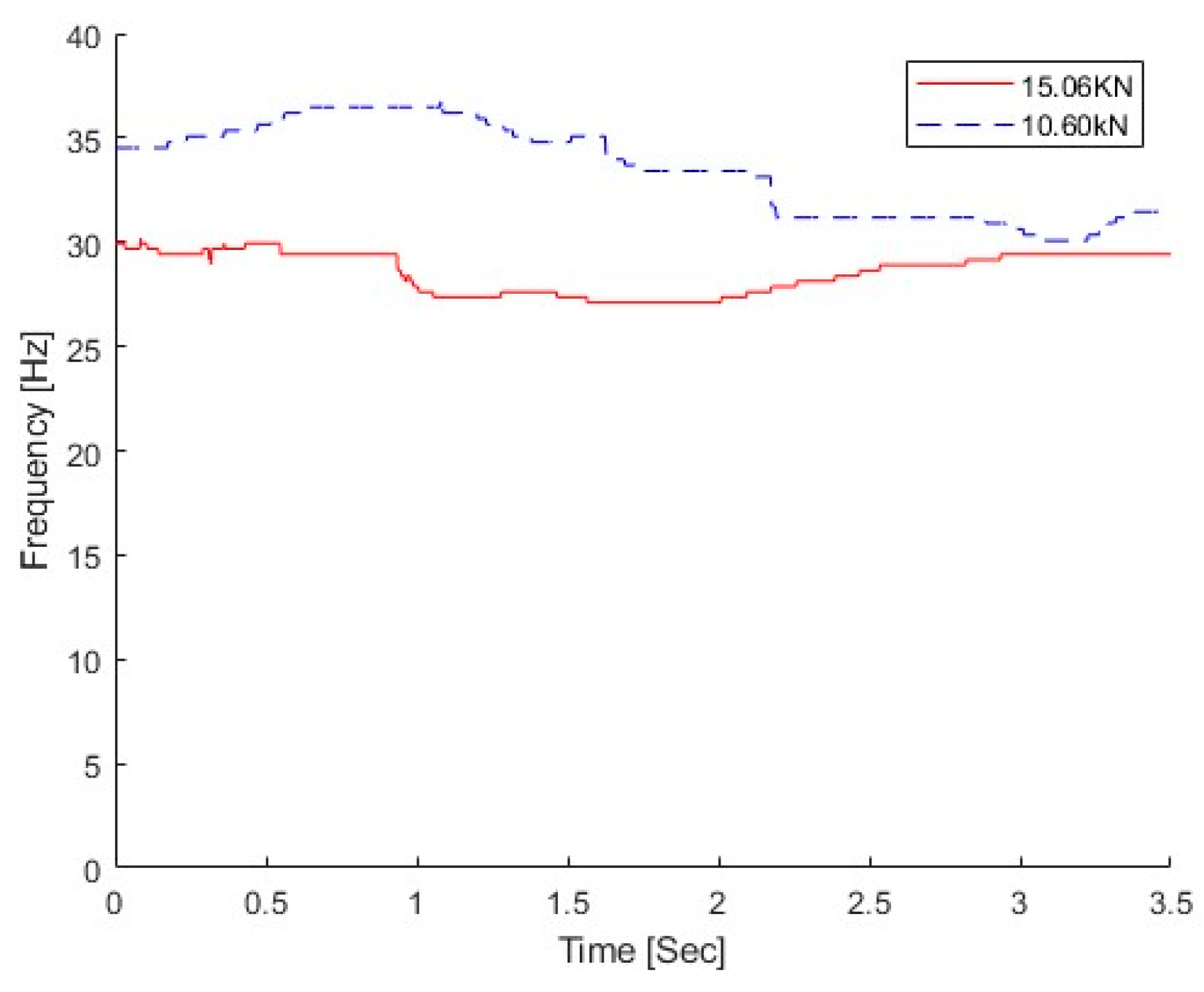
4.2. Effect of the Vehicle Weight
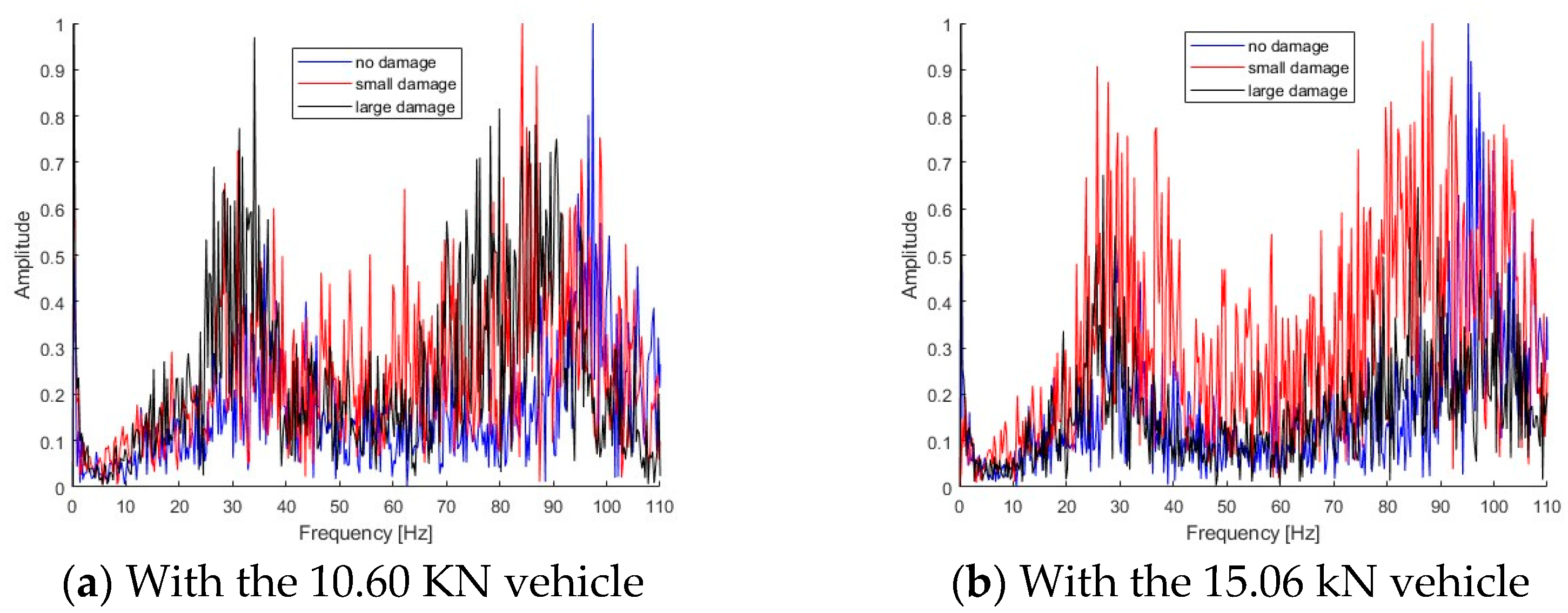
4.3. IFs of the Bridge with Different Damage Scenarios
5. Conclusions
- (1)
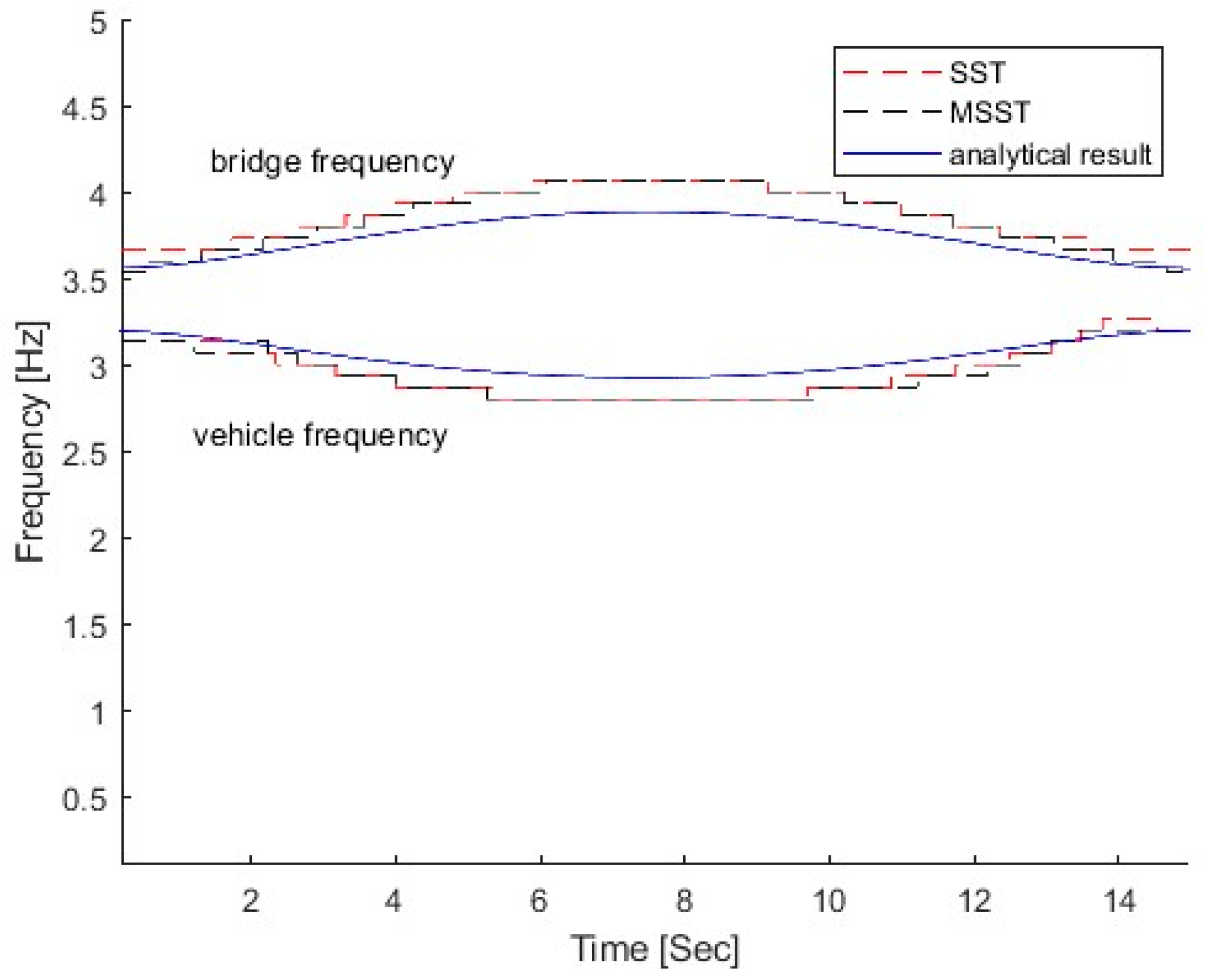
- Numerical results of the time-varying signal analysis show that the proposed MSST method can obtain a higher energy concentration and clearer time–frequency representation than that by SST. It is effective and accurate to extract the time-varying features of non-stationary signals.
- (2)
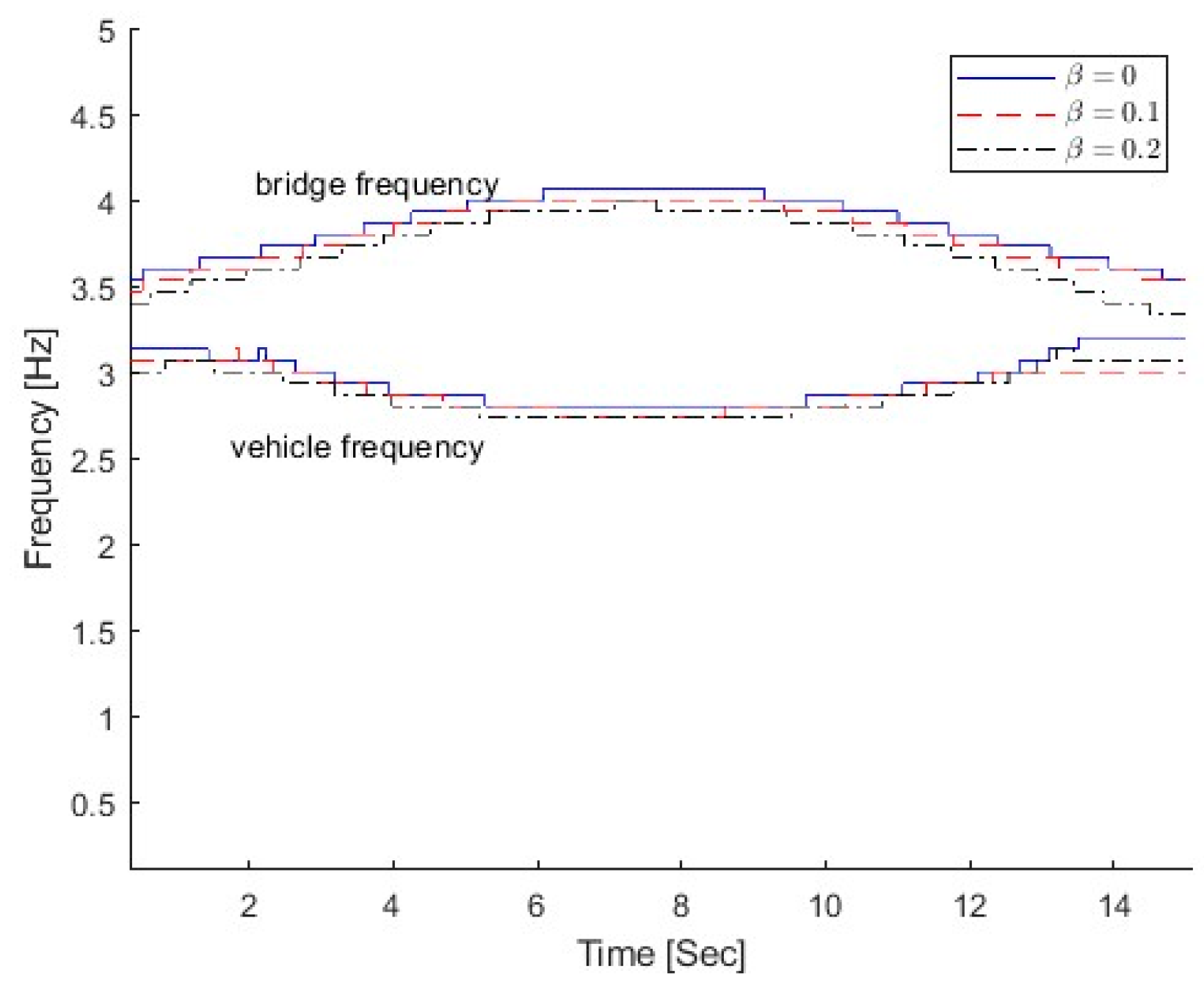
- Numerical and experimental results show that the proposed MSST method is effective and accurate in extracting the time-varying features of the vehicle–bridge interaction system. When the vehicle–bridge frequency ratio is smaller than 1, the bridge frequency component will be dominated in the time–frequency representation of the bridge responses.
- (3)
- From numerical and experimental results, the IF is reduced as the bridge damage increases. The local response is excited when the vehicle is passing over the damage location. The local variation in the IF at the damage location could be used to indicate the damage location. The change in the IF pattern is a good indicator of the bridge damage.
- (4)
- The vehicle speed affects the performance of the proposed MSST method to extract the time-varying characteristics and the low vehicle speed is recommended for bridge damage detection.
- (5)
- The performance of the proposed method to detect the damage zone of reinforced concrete bridges is validated numerically and experimentally. Further study needs to be conducted for practical applications, considering complex vehicle–bridge interaction systems using machine learning models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of bridge structural health monitoring aided by big data artificial intelligence: From condition assessment to damage detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Li, J.; Guo, J.; Zhu, X.; Yu, Y. Nonlinear characteristics of damaged bridges under moving loads using parameter optimization variational mode decomposition. J. Civ. Struct. Health Monit. 2022, 12, 1009–1026. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Structural Health Monitoring Based on Vehicle–bridge Interaction: Accomplishments and Challenges. Adv. Struct. Eng. 2015, 18, 1999–2015. [Google Scholar] [CrossRef]
- Jalili, N.; Esmailzadeh, E. Dynamic interaction of vehicles moving on uniform bridges. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2002, 216, 343–350. [Google Scholar] [CrossRef]
- Zhong, H.; Yang, M.; Gao, Z. Dynamic responses of prestressed bridge and vehicle through bridge–vehicle interaction analysis. Eng. Struct. 2015, 87, 116–125. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Recent developments in inverse problems of vehicle–bridge interaction dynamics. J. Civ. Struct. Health Monit. 2016, 6, 107–128. [Google Scholar] [CrossRef]
- Chen, E.; Zhang, X.; Wang, G. Rigid–flexible coupled dynamic response of steel–concrete bridges on expressways considering vehicle–road–bridge interaction. Adv. Struct. Eng. 2020, 23, 160–173. [Google Scholar] [CrossRef]
- Fanning, P.J.; E Boothby, T.; Roberts, B.J. Longitudinal and transverse effects in masonry arch assessment. Constr. Build. Mater. 2001, 15, 51–60. [Google Scholar] [CrossRef]
- Law, S.; Zhu, X. Dynamic behavior of damaged concrete bridge structures under moving vehicular loads. Eng. Struct. 2004, 26, 1279–1293. [Google Scholar] [CrossRef]
- Zhang, J.; Peng, H.; Cai, C.S. Destructive testing of a decommissioned reinforced concrete bridge. J. Bridg. Eng. 2013, 18, 564–569. [Google Scholar] [CrossRef]
- Yin, X.; Liu, Y.; Deng, L.; Kong, X. Dynamic behavior of damaged bridge with multi-cracks under moving vehicular loads. Int. J. Struct. Stab. Dyn. 2017, 17, 1750019. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Yu, L. Comparison of short-time fourier transform and wavelet transform of transient and tone burst wave propagation signals for structural health monitoring. In Proceedings of the 4th International Workshop on Structural Health Monitoring, Stanford University, Palo Alto, CA, USA, 15–17 September 2003. [Google Scholar]
- Bao, W.; Tu, X.; Li, F.; Huang, Y. Generalized synchrosqueezing transform: Algorithm and applications. IEEE Trans. Instrum. Meas. 2022, 72, 3503511. [Google Scholar] [CrossRef]
- Tang, L.; Shang, X.-Q.; Zhang, Y.-Z.; Huang, T.-L.; Wang, N.-B.; Ren, W.-X. Damage detection for bridges under a moving vehicle based on generalized S-local maximum reassignment transform. Eng. Struct. 2025, 330, 119953. [Google Scholar] [CrossRef]
- Li, L.; Cai, H.; Han, H.; Jiang, Q.; Ji, H. Adaptive short-time Fourier transform and synchrosqueezing transform for non-stationary signal separation. Signal Process. 2020, 166, 107231. [Google Scholar] [CrossRef]
- Liu, J.-L.; Wang, Z.-C.; Ren, W.-X.; Li, X.-X. Structural time-varying damage detection using synchrosqueezing wavelet transform. Smart Struct. Syst. 2015, 15, 119–133. [Google Scholar] [CrossRef]
- Tary, J.B.; Herrera, R.H.; van der Baan, M. Analysis of time-varying signals using continuous wavelet and synchrosqueezed transforms. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2018, 376, 20170254. [Google Scholar] [CrossRef]
- Sony, S.; Sadhu, A. Synchrosqueezing transform-based identification of time-varying structural systems using multi-sensor data. J. Sound Vib. 2020, 486, 115576. [Google Scholar] [CrossRef]
- Li, J.; Zhu, X.; Law, S.S.; Samali, B. Time-varying characteristics of bridges under the passage of vehicles using synchroextracting transform. Mech. Syst. Signal Process. 2020, 140, 106727. [Google Scholar] [CrossRef]
- Li, Y.Z.; Fang, S.E. A vibration signal decomposition method for time-varying structures using empirical multi-synchroextracting decomposition. Mech. Syst. Signal Process. 2025, 224, 112107. [Google Scholar] [CrossRef]
- Yu, G.; Wang, Z.; Zhao, P. Multisynchrosqueezing transform. IEEE Trans. Ind. Electron. 2018, 66, 5441–5455. [Google Scholar] [CrossRef]
- Sun, H.; Di, S.; Du, Z.; Wang, L.; Xiang, C. Application of multisynchrosqueezing transform for structural modal parameter identification. J. Civ. Struct. Heath Monit. 2021, 11, 1175–1188. [Google Scholar] [CrossRef]
- Li, Z.; Lan, Y.; Feng, K.; Lin, W. Investigation of time-varying frequencies of two-axle vehicles and bridges during interaction using drive-by methods and improved multisynchrosqueezing transform. Mech. Syst. Signal Process. 2024, 220, 11677. [Google Scholar] [CrossRef]
- Yang, Y.B.; Cheng, M.C.; Chang, K.C. Frequency variation in vehicle–bridge interaction systems. Int. J. Struct. Stab. Dyn. 2013, 13, 1350019. [Google Scholar] [CrossRef]
- Wahab, M.A.; DE Roeck, G.; Peeters, B. Parameterization of damage in reinforced concrete structures using model updating. J. Sound Vib. 1999, 228, 717–730. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.-T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Brevdo, E.; Fuckar, N.S.; Thakur, G.; Wu, H.T. The synchrosqueezing algorithm: A robust analysis tool for signals with time-varying spectrum. arXiv 2011, arXiv:1105.0010. [Google Scholar]
- Thakur, G.; Wu, H.-T. Synchrosqueezing-based recovery of instantaneous frequency from nonuniform samples. SIAM J. Math. Anal. 2011, 43, 2078–2095. [Google Scholar] [CrossRef]
- ISO8608: 1995(E); Mechanical Vibration–Road Surface Profiles–Reporting of Measured Data. International Organization for Standardization: Geneva, Switzerland, 1995.
- Talaei, S.; Zhu, X.; Li, J.; Yu, Y.; Chan, T.H. Transfer learning based bridge damage detection: Leveraging time-frequency features. Structures 2023, 57, 105052. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Stiffness (N/m) | Mass of Vehicle (kg) | Frequency of Vehicle (Hz) | Vehicle/Bridge Mass Ratio | Vehicle/Bridge Frequency Ratio |
|---|---|---|---|---|---|
| 1 | 3.53 × 105 | 875 | 3.20 | 0.0048 | 0.90 |
| 2 | 7.05 × 105 | 1750 | 3.20 | 0.0095 | 0.90 |
| 3 | 1.41 × 106 | 3500 | 3.20 | 0.0190 | 0.90 |
| 4 | 2.82 × 106 | 7000 | 3.20 | 0.0390 | 0.90 |
| 5 | 1.71 × 106 | 7000 | 2.49 | 0.0390 | 0.70 |
| 6 | 4.23 × 106 | 7000 | 3.91 | 0.0390 | 1.10 |
| 7 | 1.01 × 107 | 7000 | 6.04 | 0.0390 | 1.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Zhu, X.; Li, J. Time–Frequency Characteristics of Vehicle–Bridge Interaction System for Structural Damage Detection Using Multi-Synchrosqueezing Transform. Sensors 2025, 25, 4398. https://doi.org/10.3390/s25144398
Gao M, Zhu X, Li J. Time–Frequency Characteristics of Vehicle–Bridge Interaction System for Structural Damage Detection Using Multi-Synchrosqueezing Transform. Sensors. 2025; 25(14):4398. https://doi.org/10.3390/s25144398
Chicago/Turabian StyleGao, Mingzhe, Xinqun Zhu, and Jianchun Li. 2025. "Time–Frequency Characteristics of Vehicle–Bridge Interaction System for Structural Damage Detection Using Multi-Synchrosqueezing Transform" Sensors 25, no. 14: 4398. https://doi.org/10.3390/s25144398
APA StyleGao, M., Zhu, X., & Li, J. (2025). Time–Frequency Characteristics of Vehicle–Bridge Interaction System for Structural Damage Detection Using Multi-Synchrosqueezing Transform. Sensors, 25(14), 4398. https://doi.org/10.3390/s25144398