
Optimizing Time-Sensitive Traffic Scheduling in Low-Earth-Orbit Satellite Networks


Abstract
1. Introduction
- (1)
- Designed a management framework for LEO satellite networks tailored to time-sensitive services, incorporating SDN-based management strategies.
- (2)
- Developed an efficient dynamic priority queue scheduling mechanism (TPC-CQF) to provide differentiated forwarding guarantees for multi-level time-sensitive flows.
- (3)
- Proposed a flexible scheduling strategy based on redundant time slots, fully utilizing the redundant time slots of time-sensitive flows to achieve efficient forwarding of high-priority TSFs.
2. System Model
2.1. Network Architecture
2.2. Queue Scheduling Mechanism for TSFs
3. TPC-CQF Improved from CQF
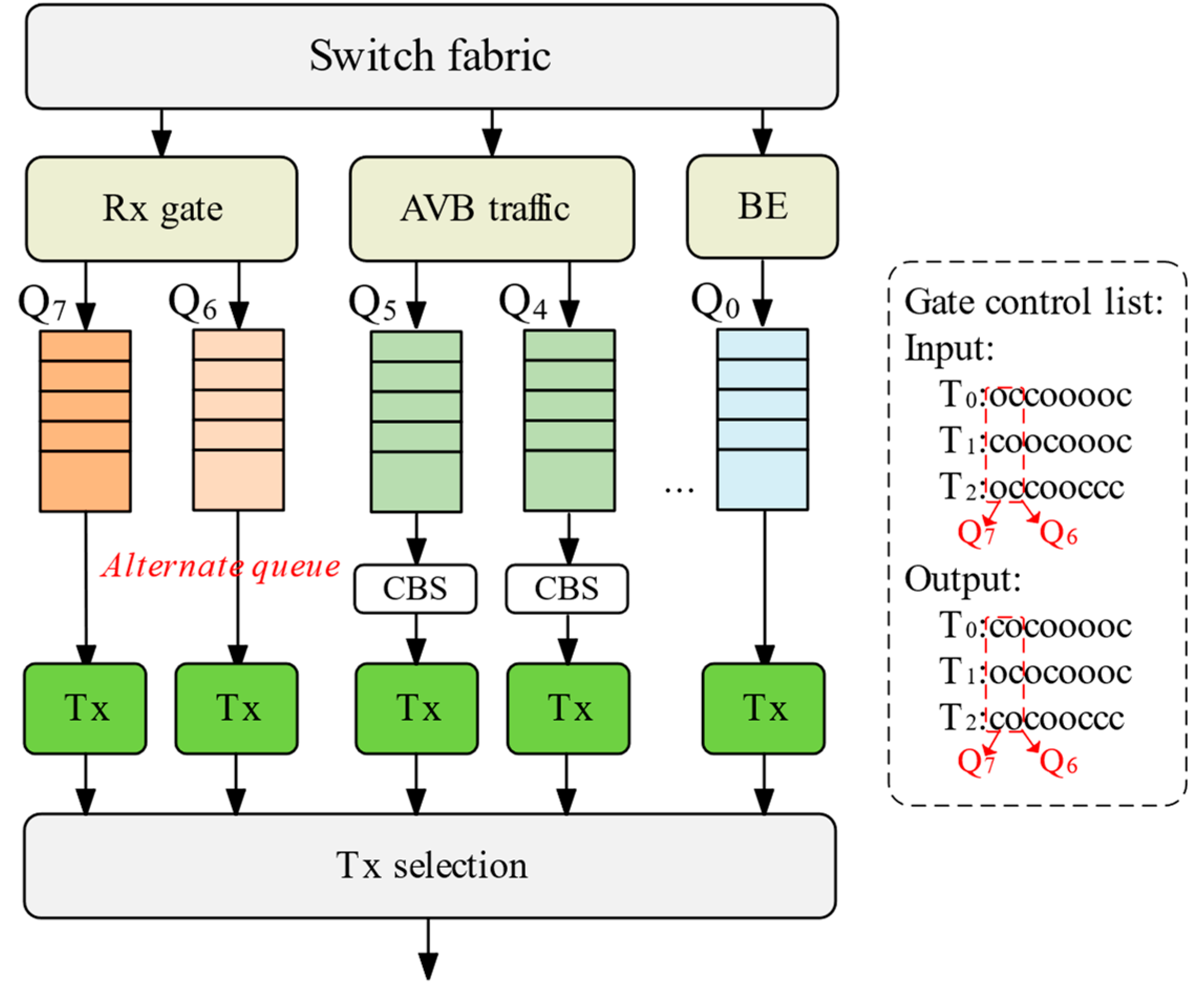
3.1. CQF-Based Queue Scheduling Mechanism
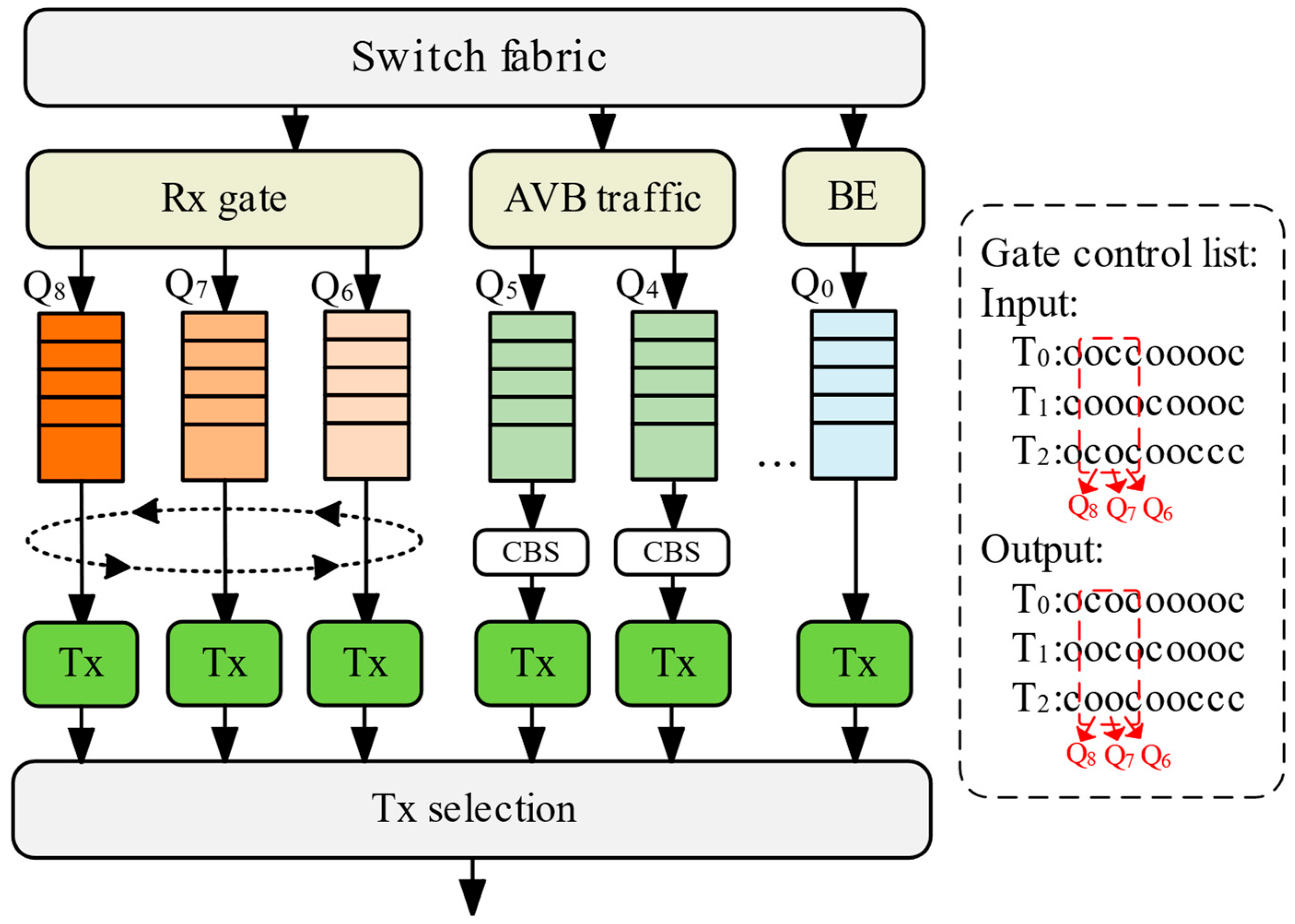
3.2. TPC-CQF Mechanism
3.3. Queue Priority Control of TPC-CQF
| Algorithm 1: Queue Scheduling Algorithm Based on TPC-CQF |
| Input: Packet set P, queue set Q = {Q1, Q2, Q3}, queue capacity , current time slot t, fixed time slot duration T; Output: Updated queue assignments, total priority sum SQ, remaining capacity KQ;
|
- (1)
- Initialization: Set the total priority sum for all queues to 0, capacity to the maximum value, and packet count to zero. Initialize an empty packet assignment record.
- (2)
- Calculate the waiting cycle based on the packet arrival time and the current time. Use the waiting cycle and deadline to compute the dynamic priority, determining the assignment order.
- (3)
- Identify the set of feasible queues with sufficient capacity. From this set, sequentially select the queue with the highest total priority sum, the smallest capacity, and the fewest packets for packet assignment.
- (4)
- Check the priority or size differences between packet pairs, prioritizing the processing of packets with higher priority or larger size. If both are equal, randomly select one for processing.
- (5)
- Select the queue with the highest total priority sum to transmit its packets. After transmission, update the queue’s capacity, total priority sum, and packet count.
- (6)
- Recalculate the waiting cycle and dynamic priority for packets in each queue. Update the queue’s total priority sum to reflect the latest state.
4. Simulation Analysis
4.1. System Design
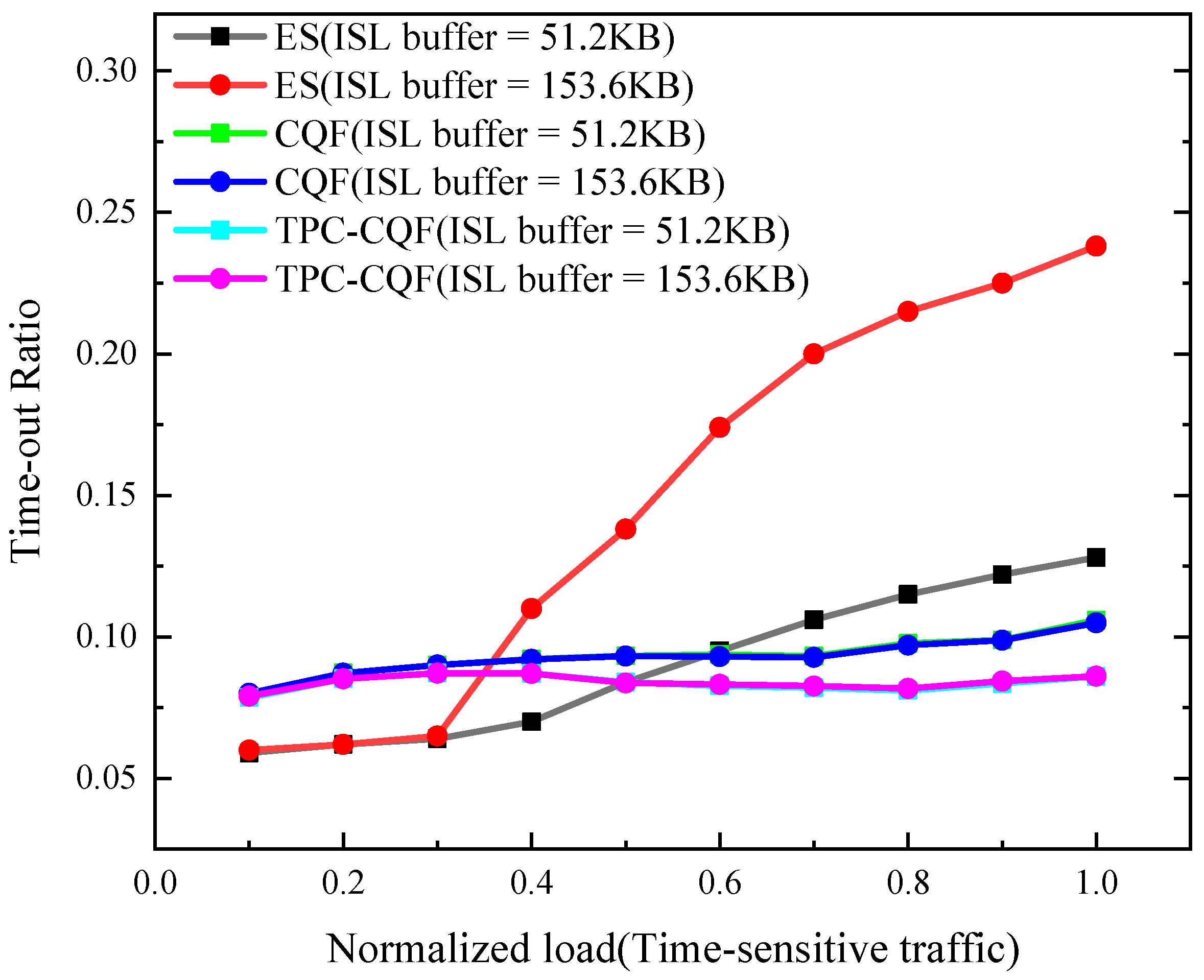
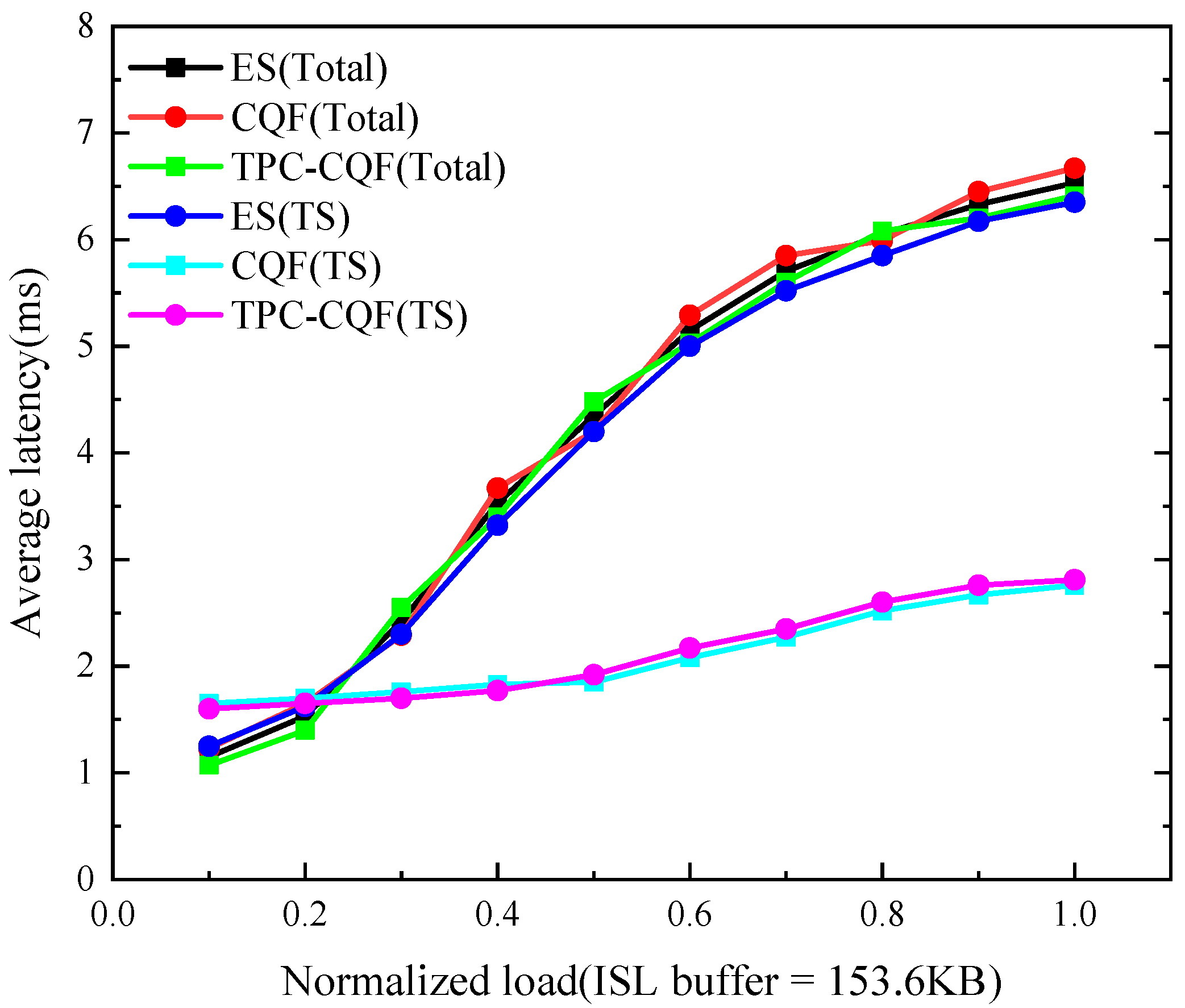
4.2. Performance Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, R.; Kishk, M.A.; Alouini, M.S. Ultra-dense LEO satellite-based communication systems: A novel modeling technique. IEEE Commun. Mag. 2022, 60, 25–31. [Google Scholar] [CrossRef]
- Kodheli, O.; Lagunas, E.; Maturo, N.; Sharma, S.K.; Shankar, B.; Montoya, J.F.M.; Duncan, J.C.M.; Spano, D.; Chatzinotas, S.; Kisseleff, S.; et al. Satellite communications in the new space era: A survey and future challenges. IEEE Commun. Surv. Tutor. 2020, 23, 70–109. [Google Scholar] [CrossRef]
- Chai, F.; Zhang, Q.; Hu, Y.; Xin, X.; Gao, R.; Guizani, M. Joint multi-task offloading and resource allocation for mobile edge computing systems in satellite IoT. IEEE Trans. Veh. Technol. 2023, 72, 7783–7795. [Google Scholar] [CrossRef]
- Hao, Y.; Song, Z.; Zhong, Z.; Zhang, Q.; Miao, Z. Joint communication, computing, and caching resource allocation in LEO satellite MEC networks. IEEE Access 2023, 11, 6708–6716. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Optical communication in space: Challenges and mitigation techniques. IEEE Commun. Surv. Tutor. 2016, 19, 57–96. [Google Scholar] [CrossRef]
- Leng, T.; Xu, Y.; Cui, G.; Wang, W. Caching-aware intelligent handover strategy for LEO satellite networks. Remote Sens. 2021, 13, 2230. [Google Scholar] [CrossRef]
- Walrand, J. A concise tutorial on traffic shaping and scheduling in time-sensitive networks. IEEE Commun. Surv. Tutor. 2023, 25, 1941–1953. [Google Scholar] [CrossRef]
- Dong, F.; Zhang, Y.; Liu, G.; Heng, Y.; Sun, C. Delay-sensitive service provisioning in software-defined low-earth-orbit satellite networks. Electronics 2023, 12, 3474. [Google Scholar] [CrossRef]
- Dai, C.; Zhang, M.; Li, C.; Zhao, J.; Chen, Q. QoE-aware intelligent satellite constellation design in satellite Internet of Things. IEEE Internet Things J. 2020, 8, 4855–4867. [Google Scholar] [CrossRef]
- Di, B.; Zhang, H.; Song, L.; Li, Y.; Li, G.Y. Ultra-Dense LEO: Integrating Terrestrial-Satellite Networks Into 5G and Beyond for Data Offloading. IEEE Trans. Wirel. Commun. 2019, 18, 47–62. [Google Scholar] [CrossRef]
- Liu, W.; Tao, Y.; Liu, L. Load-Balancing Routing Algorithm Based on Segment Routing for Traffic Return in LEO Satellite Networks. IEEE Access 2019, 7, 112044–112053. [Google Scholar] [CrossRef]
- Sun, X.; Cao, S. A Routing and Wavelength Assignment Algorithm Based on Two Types of LEO Constellations in Optical Satellite Networks. J. Light. Technol. 2020, 38, 2106–2113. [Google Scholar] [CrossRef]
- Shi, K.; Li, H.; Suo, L. Temporal graph based energy-limited max-flow routing over satellite networks. In Proceedings of the IEEE/IFIP Networking Conference, Espoo/Helsinki, Finland, 21–24 June 2021; pp. 1–3. [Google Scholar]
- Huang, Y.; Jiang, X.; Chen, S.; Yang, F.; Yang, J. Pheromone incentivized intelligent multipath traffic scheduling approach for LEO satellite networks. IEEE Trans. Wirel. Commun. 2022, 21, 5889–5902. [Google Scholar] [CrossRef]
- Tao, J.; Liu, S.; Liu, C. A traffic scheduling scheme for load balancing in SDN-based space-air-ground integrated networks. In Proceedings of the IEEE/International Conference on High Performance Switching and Routing, Taicang, China, 6–8 June 2022; pp. 95–100. [Google Scholar]
- Marcano, N.J.H.; Diez, L.; Aguero, R.; Jacobsen, R.H. Finite buffer queuing delay performance in the low earth orbit land mobile satellite channel. In Proceedings of the IEEE/Wireless Communications and Networking Conference, Austin, TX, USA, 10–13 April 2022; pp. 132–137. [Google Scholar]
- Zhou, D.; Sheng, M.; Luo, J.; Liu, R.; Li, J.; Han, Z. Collaborative data scheduling with joint forward and backward induction in small satellite networks. IEEE Trans. Commun. 2019, 67, 3443–3456. [Google Scholar] [CrossRef]
- Yan, J.; Quan, W.; Jiang, X.; Sun, Z. Injection time planning: Making CQF practical in time-sensitive networking. In Proceedings of the IEEE/Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 616–625. [Google Scholar]
- Wang, R.; Kishk, M.A.; Alouini, M.S. Stochastic geometry-based low latency routing in massive LEO satellite networks. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3881–3894. [Google Scholar] [CrossRef]
- Vasisht, D.; Shenoy, J.; Chandra, R. L2D2: Low latency distributed downlink for LEO satellites. In Proceedings of the ACM SIGCOMM 2021 Conference, New York, NY, USA, 27 August 2021; pp. 151–164. [Google Scholar]
- IEEE 802.1Qch-2017; IEEE Standard for Local and Metropolitan Area Networks—Bridges and Bridged Networks—Amendment 29: Cyclic Queuing and Forwarding. IEEE: Piscataway, NJ, USA, 2017.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of satellites | 64 |
| Number of orbits | 8 |
| Satellites per orbit | 8 |
| Orbit altitude | 550 km |
| ISL bandwidth | 1 Gbps |
| Uplink bandwidth per user | 100 Mbps |
| Queue buffer capacity | 32 KB |
| CQF time slot | 500 microseconds |
| Queue Count | TSF Packet Loss Rate | Average Latency (ms) | Throughput Gain | Timeout Rate |
|---|---|---|---|---|
| 2 | 0.148 | 1.82 | Baseline | 7% |
| 3 | 0.001 | 2.05 | +28% | 6.7% |
| 4 | 0.021 | 2.91 | +16% | 12% |
| 5 | 0.096 | 3.72 | +5% | 43% |
| Satellite Node Count | TSF Packet Loss Rate | Average Latency (ms) | Throughput | Timeout Rate |
|---|---|---|---|---|
| 64 | 0.0002 | 2.05 | 78.2% | 7.0% |
| 100 | 0.0008 | 2.08 | 67.8% | 9.3% |
| 225 | 0.0036 | 2.12 | 55.6% | 13.6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Xiao, N.; Liu, B.; Zhang, Y.; Li, T. Optimizing Time-Sensitive Traffic Scheduling in Low-Earth-Orbit Satellite Networks. Sensors 2025, 25, 4327. https://doi.org/10.3390/s25144327
Liu W, Xiao N, Liu B, Zhang Y, Li T. Optimizing Time-Sensitive Traffic Scheduling in Low-Earth-Orbit Satellite Networks. Sensors. 2025; 25(14):4327. https://doi.org/10.3390/s25144327
Chicago/Turabian StyleLiu, Wei, Nan Xiao, Bo Liu, Yuxian Zhang, and Taoyong Li. 2025. "Optimizing Time-Sensitive Traffic Scheduling in Low-Earth-Orbit Satellite Networks" Sensors 25, no. 14: 4327. https://doi.org/10.3390/s25144327
APA StyleLiu, W., Xiao, N., Liu, B., Zhang, Y., & Li, T. (2025). Optimizing Time-Sensitive Traffic Scheduling in Low-Earth-Orbit Satellite Networks. Sensors, 25(14), 4327. https://doi.org/10.3390/s25144327