
ROS-Based Navigation and Obstacle Avoidance: A Study of Architectures, Methods, and Trends


Abstract
1. Introduction
2. ROS System Architecture
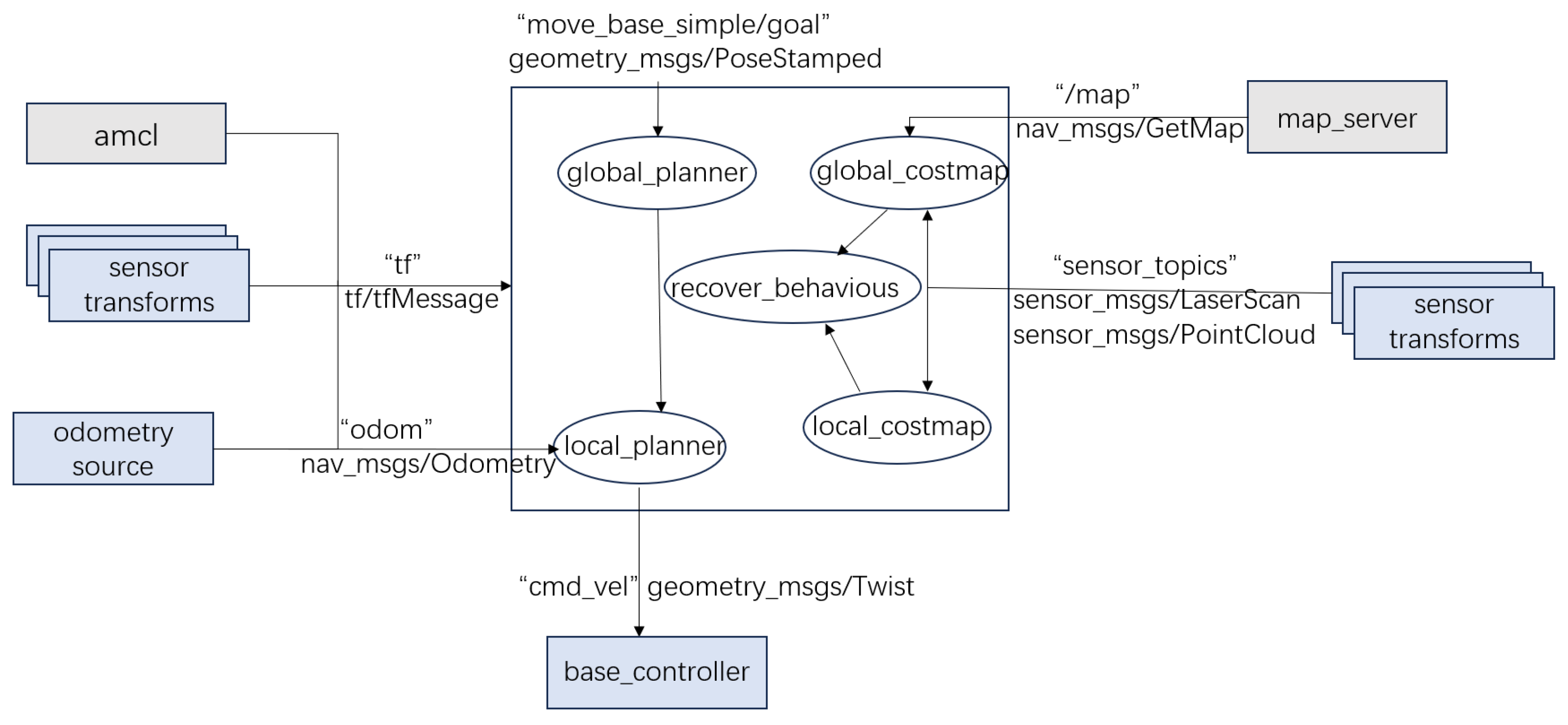
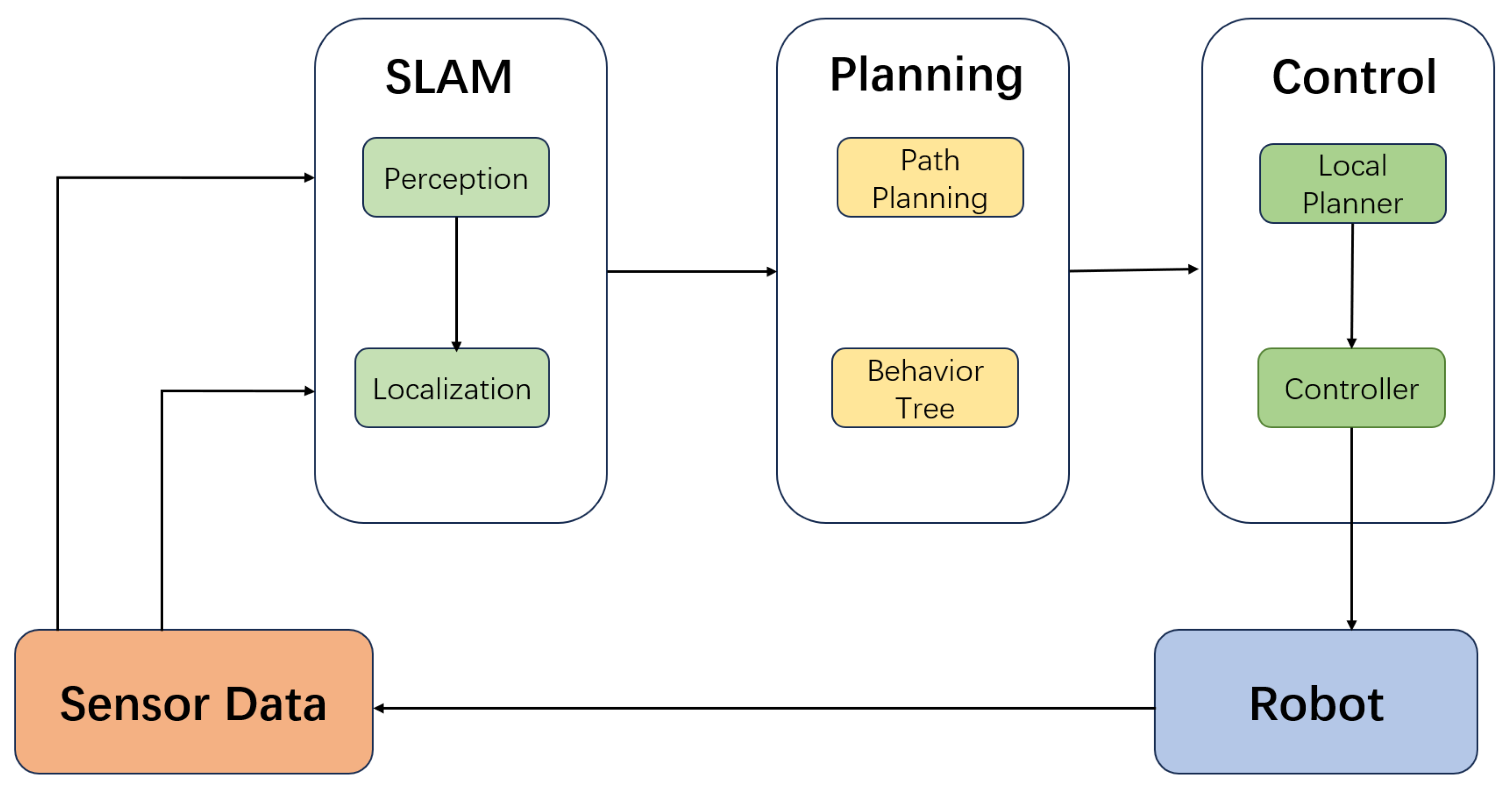
2.1. Architecture of the ROS Navigation Stack
2.2. Architectural Differences and Optimizations Between ROS 1 and ROS 2
2.3. Behaviour Tree–Driven Navigation Control Workflow
- High re-usability of nodes: behaviour nodes are re-usable across different tasks, eliminating the need to redesign the control model.
- Support for asynchronous event handling and hierarchical fault recovery: BTs are capable of monitoring dynamic environmental changes in parallel and executing recovery actions in a hierarchical manner when failures occur.
- Ease of visual debugging: the tree-based structure is intuitive and transparent, and supported visualisation tools enable real-time monitoring of node states, significantly simplifying debugging and maintenance.
2.4. Core Technology Module Analysis
2.4.1. State Estimation and Localisation
- HAMCL (Adaptive Monte Carlo Localisation): suitable for known-map scenarios, this method employs particle filtering to fuse laser scan data and odometry for accurate pose estimation.
- SLAM algorithms: solutions such as Gmapping, Cartographer, and slam_toolbox support simultaneous localisation and mapping, making them well suited for operation in unknown environments.
2.4.2. Path Planning and Tracking Control
2.4.3. Obstacle-Avoidance Mechanisms and Costmaps
- The static layer is responsible for loading predefined static obstacle information;
- The obstacle layer updates the environmental model in real time based on perception data from LiDAR or depth cameras;
- The inflation layer expands the boundaries of detected obstacles according to safety distance requirements, ensuring the feasibility and safety of path planning.
2.4.4. Controller Execution and Task Interfaces
3. Obstacle-Avoidance Algorithms
3.1. Definition of Obstacle-Avoidance Tasks and Key Technical Challenges
- Incomplete perception and inconsistent sensor fusion: although integrating multiple sensors (such as ultrasonic sensors, LiDAR, and cameras) can enhance the comprehensiveness and robustness of environmental modelling, differences in perception range and measurement accuracy among sensors often lead to incomplete coverage or fusion bias during real-world deployment scenarios [28].
- Uncertainty introduced by dynamic obstacles: in dynamic environments, the behaviour of obstacles is often unpredictable, requiring frequent path re-planning to adapt to changes in both targets and obstacles. This introduces significant uncertainty and places high demands on the real-time responsiveness of the path-planning system [29].
- Trade-off between real-time performance and optimality: under embedded deployment conditions, it is necessary to balance the trade-off between algorithmic solving speed and the quality of locally optimal trajectories [30].
- System robustness and limited transferability: perception errors, map inconsistencies, and unexpected obstacles can result in the failure of the path-planning strategy. Therefore, it is essential to improve the system’s adaptability to perception instability and its transferability to new environments [31].
3.2. Typical Paradigms and Comparative Analysis of Obstacle-Avoidance Algorithms in ROS
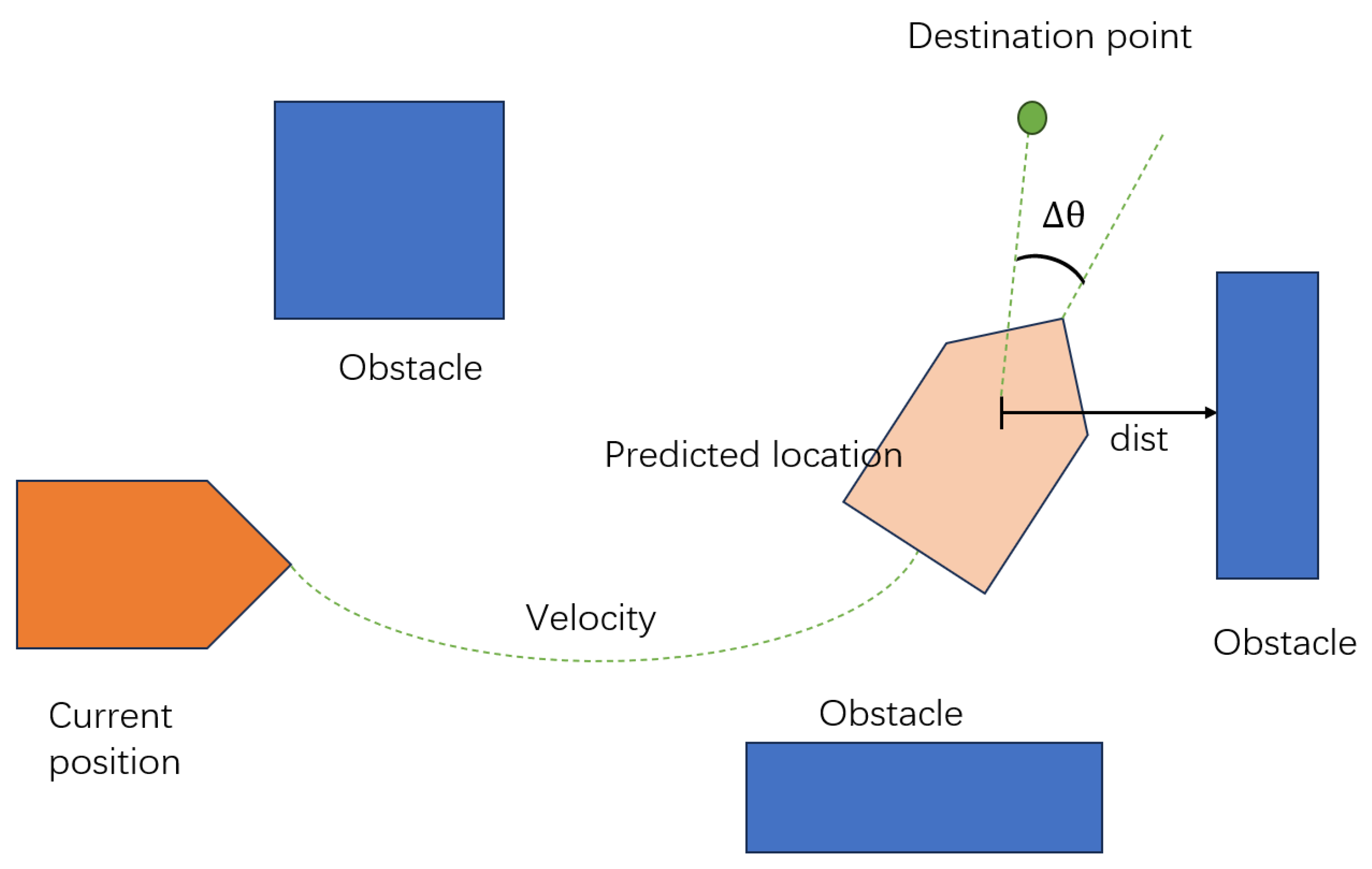
3.2.1. Dynamic Window Approach (DWA)
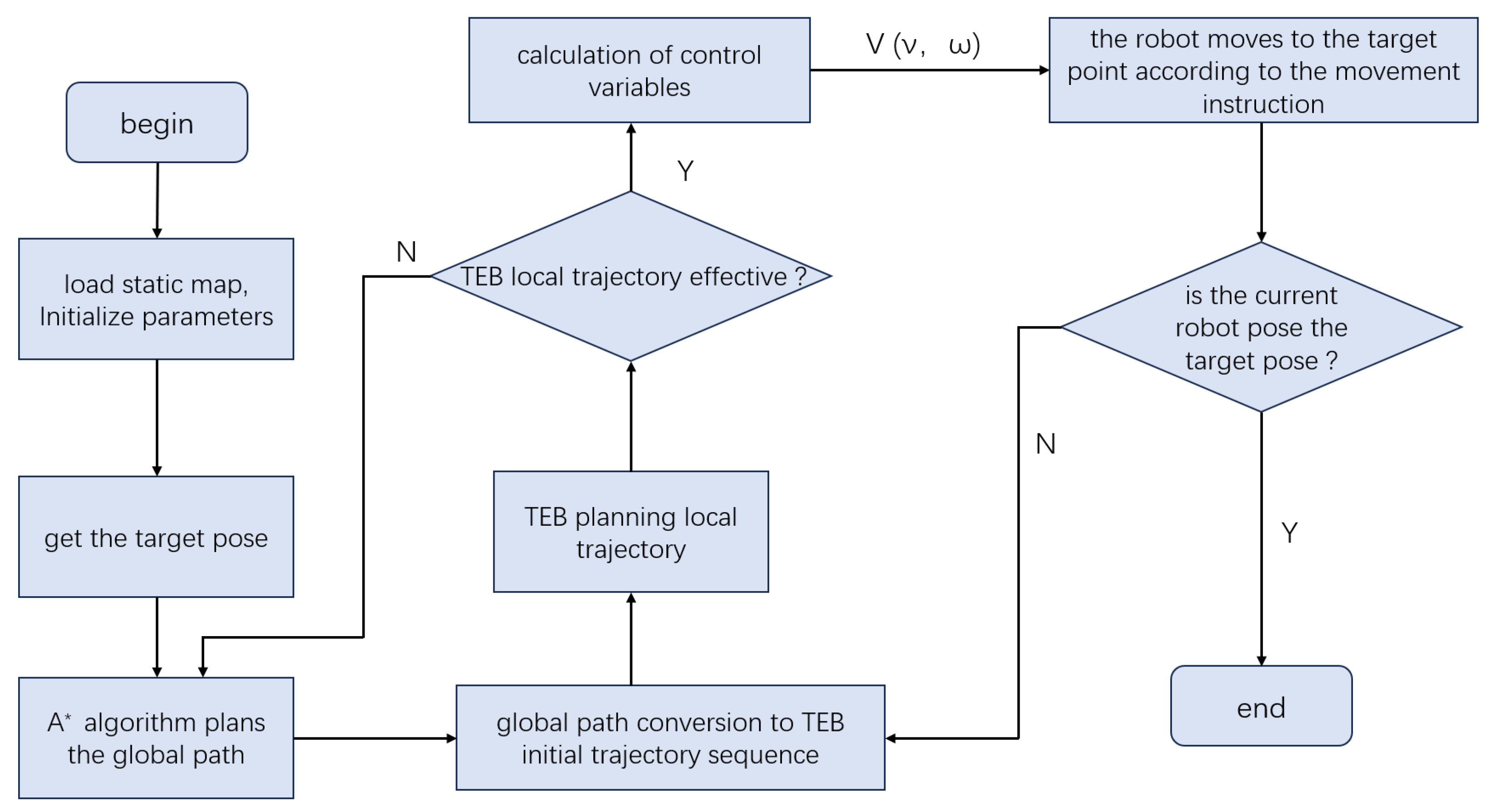
3.2.2. Timed Elastic Band (TEB)
3.2.3. Model Predictive Path Integral (MPPI)
- GP-MPPI introduces Gaussian Process modelling to capture dynamic environmental state transitions, thereby enhancing the system’s responsiveness to moving obstacles and improving overall navigation robustness [37].
- DRPA-MPPI incorporates a Dynamic Repulsive Potential Approach (DRPA) to strengthen local obstacle-perception and -avoidance capabilities, particularly in unknown or unstructured environments [38].
- Hybrid A-MPPI* integrates globally guided paths generated by the Hybrid A* algorithm, thereby improving MPPI’s consistency with global navigation goals and its performance in complex map scenarios [39].
3.3. Advances in Data-Driven Obstacle-Avoidance Methods
3.3.1. Reinforcement Learning
3.3.2. Vision-Based Deep Learning Methods
4. Problems and Challenges
4.1. Error Analysis of Perception and Localisation Technologies
4.2. Navigation Robustness in Dynamic and Complex Environments
4.3. Technical Adaptation Challenges on Resource-Constrained Platforms
4.4. Multi-Robot Collaborative Navigation Challenges
4.5. Technical Bottlenecks in Cross-Platform Deployment
5. Discussion and Emerging Trends
5.1. Deep Integration of Navigation Technologies and Artificial Intelligence
5.2. Cloud–Edge Collaborative Navigation Architecture
5.3. Navigation Technologies for Human–Robot Interaction and Collaboration
5.4. The Future of ROS 2 in Industrial Applications
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method/Framework | Description | Link or Availability |
|---|---|---|
| Arena-Rosnav | A deep Reinforcement Learning-based navigation framework integrated with ROS and Gazebo simulation environments. | https://github.com/Arena-Rosnav (accessed on 15 March 2025) |
| FogROS2 | A cloud–edge collaborative framework for ROS 2, supporting task offloading and SLAM acceleration. | https://github.com/Arena-Rosnav (accessed on 15 March 2025) |
| RL-DOVS | A Reinforcement Learning-based extension of the Dynamic Object Velocity Space (DOVS) model for dynamic obstacle avoidance. | Source code not publicly available; readers are advised to contact the authors [27]. |
| YOLO-RRT | A hybrid approach combining YOLO object detection with RRT path planning and obstacle avoidance in Webots-based simulation. | https://github.com/Arena-Rosnav (accessed on 17 March 2025) |
References
- Nguyen, A.T.; Vu, C.T. Obstacle Avoidance for Autonomous Mobile Robots Based on Mapping Method. In Proceedings of the International Conference on Advanced Mechanical Engineering, Automation and Sustainable Development, Ha Long, Vietnam, 4–7 November 2021; Springer International Publishing: Cham, Switzerland, 2021; pp. 810–816. [Google Scholar]
- Sun, H.; Zhang, W.; Yu, R.; Zhang, Y. Motion Planning for Mobile Robots—Focusing on Deep Reinforcement Learning: A Systematic Review. IEEE Access 2021, 9, 69061–69081. [Google Scholar] [CrossRef]
- Chen, C.S.; Lin, C.J.; Lai, C.C.; Lin, S.Y. Velocity Estimation and Cost Map Generation for Dynamic Obstacle Avoidance of ROS-Based AMR. Machines 2022, 10, 501. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Meng, Q.; Martín, D.; de la Escalera, A.; Armingol, J.M. Monocular Vision-Based Obstacle Detection/Avoidance for Unmanned Aerial Vehicles. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 92–97. [Google Scholar]
- Megalingam, R.K.; Rajendraprasad, A.; Manoharan, S.K. Comparison of Planned Path and Travelled Path Using ROS Navigation Stack. In Proceedings of the 2020 International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; IEEE: Belgaum, India, 2020; pp. 1–6. [Google Scholar]
- Macenski, S.; Moore, T.; Lu, D.V.; Merzlyakov, A.; Ferguson, M. From the Desks of ROS Maintainers: A Survey of Modern & Capable Mobile Robotics Algorithms in the Robot Operating System 2. Robot. Auton. Syst. 2023, 168, 104493. [Google Scholar]
- Aggarwal, S.; Kumar, N. Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Chen, X.; Yang, C.; Hu, H.; Gao, Y.; Zhu, Q.; Shao, G. A Hybrid DWA-MPC Framework for Coordinated Path Planning and Collision Avoidance in Articulated Steering Vehicles. Machines 2024, 12, 939. [Google Scholar] [CrossRef]
- Kretzschmar, H.; Spies, M.; Sprunk, C.; Burgard, W. Socially Compliant Mobile Robot Navigation via Inverse Reinforcement Learning. Int. J. Robot. Res. 2016, 35, 1289–1307. [Google Scholar] [CrossRef]
- Gao, Y.; Li, S. Obstacle Avoidance Path Planning for UAV Applied to Photovoltaic Stations Based on Improved Dynamic Window Method. Electronics 2025, 14, 1963. [Google Scholar] [CrossRef]
- Garzón, M. Using ROS in Multi-robot Systems: Experiences and Lessons Learned from Real-World Field Tests. In Robot Operating System (ROS); Koubaa, A., Ed.; Studies in Computational Intelligence; Springer: Cham, Switzerland, 2017; Volume 707. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Joseph, L.; Cacace, J. Mastering ROS for Robotics Programming; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Lin, C.-J.; Peng, C.-C.; Lu, S.-Y. Real-Time Localization for an AMR Based on RTAB-MAP. Actuators 2025, 14, 117. [Google Scholar] [CrossRef]
- Muñoz–Bañón, M.Á.; del Pino, I.; Candelas, F.A.; Torres, F. Framework for Fast Experimental Testing of Autonomous Navigation Algorithms. Appl. Sci. 2019, 9, 1997. [Google Scholar] [CrossRef]
- Al-Tawil, B.; Candemir, A.; Jung, M.; Al-Hamadi, A. Mobile Robot Navigation with Enhanced 2D Mapping and Multi-Sensor Fusion. Sensors 2025, 25, 2408. [Google Scholar] [CrossRef]
- Pico, N.; Mite, G.; Morán, D.; Alvarez-Alvarado, M.S.; Auh, E.; Moon, H. Web-Based Real-Time Alarm and Teleoperation System for Autonomous Navigation Failures Using ROS 1 and ROS 2. Actuators 2025, 14, 164. [Google Scholar] [CrossRef]
- Macenski, S.; Foote, T.; Gerkey, B.; Lalancette, C.; Woodall, W. Robot Operating System 2: Design, Architecture, and Uses in the Wild. Sci. Robot. 2022, 7, eabm6074. [Google Scholar] [CrossRef]
- Abaza, B.F. AI-Driven Dynamic Covariance for ROS 2 Mobile Robot Localization. Sensors 2025, 25, 3026. [Google Scholar] [CrossRef] [PubMed]
- Basha, M.; Siva Kumar, M.; Chinnaiah, M.C.; Lam, S.-K.; Srikanthan, T.; Divya Vani, G.; Janardhan, N.; Hari Krishna, D.; Dubey, S. A Versatile Approach for Adaptive Grid Mapping and Grid Flex-Graph Exploration with a Field-Programmable Gate Array-Based Robot Using Hardware Schemes. Sensors 2024, 24, 2775. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Li, G.; Bian, Z. Research on the A* Algorithm Based on Adaptive Weights and Heuristic Reward Values. World Electr. Veh. J. 2025, 16, 144. [Google Scholar] [CrossRef]
- Ou, Y.; Fan, Y.; Zhang, X.; Lin, Y.; Yang, W. Improved A* Path Planning Method Based on the Grid Map. Sensors 2022, 22, 6198. [Google Scholar] [CrossRef]
- Pimentel, F.A.M.; Aquino, P.T., Jr. Evaluation of ROS Navigation Stack for Social Navigation in Simulated Environments. J. Intell. Robot. Syst. 2021, 102, 87. [Google Scholar] [CrossRef]
- Zhu, H.; Jin, K.; Gao, R.; Wang, J.; Shi, R. Timed-Elastic-Band-Based Variable Splitting for Autonomous Trajectory Planning. Symmetry 2025, 17, 848. [Google Scholar] [CrossRef]
- Wu, J.; Ma, X.; Peng, T.; Wang, H. An Improved Timed Elastic Band (TEB) Algorithm of Autonomous Ground Vehicle (AGV) in Complex Environment. Sensors 2021, 21, 8312. [Google Scholar] [CrossRef]
- Ou, X.; You, Z.; He, X. Local Path Planner for Mobile Robot Considering Future Positions of Obstacles. Processes 2024, 12, 984. [Google Scholar] [CrossRef]
- Mackay, A.K.; Riazuelo, L.; Montano, L. RL-DOVS: Reinforcement Learning for Autonomous Robot Navigation in Dynamic Environments. Sensors 2022, 22, 3847. [Google Scholar] [CrossRef] [PubMed]
- Medina-Santiago, A.; Morales-Rosales, L.A.; Hernández-Gracidas, C.A.; Algredo-Badillo, I.; Pano-Azucena, A.D.; Orozco Torres, J.A. Reactive Obstacle–Avoidance Systems for Wheeled Mobile Robots Based on Artificial Intelligence. Appl. Sci. 2021, 11, 6468. [Google Scholar] [CrossRef]
- Pico, N.; Montero, E.; Vanegas, M.; Erazo Ayon, J.M.; Auh, E.; Shin, J.; Doh, M.; Park, S.-H.; Moon, H. Integrating Radar-Based Obstacle Detection with Deep Reinforcement Learning for Robust Autonomous Navigation. Appl. Sci. 2025, 15, 295. [Google Scholar] [CrossRef]
- Abubaker, B.A.; Razmara, J.; Karimpour, J. A Novel Approach for Target Attraction and Obstacle Avoidance of a Mobile Robot in Unknown Environments Using a Customized Spiking Neural Network. Appl. Sci. 2023, 13, 13145. [Google Scholar] [CrossRef]
- Almazrouei, K.; Kamel, I.; Rabie, T. Dynamic Obstacle Avoidance and Path Planning through Reinforcement Learning. Appl. Sci. 2023, 13, 8174. [Google Scholar] [CrossRef]
- Hahn, B. Enhancing Obstacle Avoidance in Dynamic Window Approach via Dynamic Obstacle Behavior Prediction. Actuators 2025, 14, 207. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The Dynamic Window Approach to Collision Avoidance. IEEE Robot. Autom. Mag. 2002, 4, 23–33. [Google Scholar] [CrossRef]
- Quinones-Ramirez, M.; Rios-Martinez, J.; Uc-Cetina, V. Robot Path Planning Using Deep Reinforcement Learning. arXiv 2023, arXiv:2302.09120. [Google Scholar]
- Kästner, L.; Buiyan, T.; Jiao, L.; Le, T.A.; Zhao, X.; Shen, Z.; Lambrecht, J. Arena-rosnav: Towards Deployment of Deep-Reinforcement-Learning-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; IEEE: Prague, Czech Republic, 2021; pp. 6456–6463. [Google Scholar]
- Kazim, M.; Hong, J.G.; Kim, M.G.; Kim, K.K.K. Recent Advances in Path Integral Control for Trajectory Optimization: An Overview in Theoretical and Algorithmic Perspectives. Annu. Rev. Control 2024, 57, 100931. [Google Scholar] [CrossRef]
- Mohamed, I.S.; Ali, M.; Liu, L. GP-Guided MPPI for Efficient Navigation in Complex Unknown Cluttered Environments. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Detroit, MI, USA, 2023; pp. 7463–7470. [Google Scholar]
- Fuke, T.; Endo, M.; Honda, K.; Ishigami, G. DRPA-MPPI: Dynamic Repulsive Potential Augmented MPPI for Reactive Navigation in Unstructured Environments. arXiv 2025, arXiv:2503.20134. [Google Scholar]
- Williams, G.; Wagener, N.; Goldfain, B.; Drews, P.; Rehg, J.M.; Boots, B.; Theodorou, E.A. Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: Singapore, 2017; pp. 3191–3198. [Google Scholar]
- Wenzel, P.; Schön, T.; Leal-Taixé, L.; Cremers, D. Vision-Based Mobile Robotics Obstacle Avoidance with Deep Reinforcement Learning. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: Xi’an, China, 2021; pp. 14360–14366. [Google Scholar]
- Hjartarson, K. Dynamic Path Planning, Mapping, and Navigation for Autonomous GPR Survey Robots. Master’s Thesis, Umeå University, Umeå, Sweden, 2023. [Google Scholar]
- Zhao, J.; Liu, S.; Li, J. Research and Implementation of Autonomous Navigation for Mobile Robots Based on SLAM Algorithm under ROS. Sensors 2022, 22, 4172. [Google Scholar] [CrossRef] [PubMed]
- Galtarossa, L. Obstacle Avoidance Algorithms for Autonomous Navigation System in Unstructured Indoor Areas. Master’s Thesis, Politecnico di Torino, Turin, Italy, 2018. [Google Scholar]
- Adiuku, N.; Avdelidis, N.P.; Tang, G.; Plastropoulos, A. Improved Hybrid Model for Obstacle Detection and Avoidance in Robot Operating System Framework (Rapidly Exploring Random Tree and Dynamic Windows Approach). Sensors 2024, 24, 2262. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Chen, X.; Luo, K.; Zhou, Z.; Yu, S. Edge Robotics: Edge-Computing-Accelerated Multirobot Simultaneous Localization and Mapping. IEEE Internet Things J. 2022, 9, 14087–14102. [Google Scholar] [CrossRef]
- Al-Batati, A.S.; Koubaa, A.; Abdelkader, M. ROS 2 Key Challenges and Advances: A Survey of ROS 2 Research, Libraries, and Applications. preprint 2024. [Google Scholar]
- Martinez-Baselga, D.; Riazuelo, L.; Montano, L. Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS. Appl. Sci. 2023, 13, 8925. [Google Scholar] [CrossRef]
- Wang, C.; Yu, C.; Xu, X.; Gao, Y.; Yang, X.; Tang, W.; Yu, S.; Chen, Y.; Gao, F.; Jian, Z.; et al. Multi-Robot System for Cooperative Exploration in Unknown Environments: A Survey. arXiv 2025, arXiv:2503.07278. [Google Scholar]
- Ichnowski, J.; Chen, K.; Dharmarajan, K.; Adebola, S.; Danielczuk, M.; Mayoral-Vilches, V.; Jha, N.; Zhan, H.; Llontop, E.; Xu, D.; et al. FogROS2: An Adaptive Platform for Cloud and Fog Robotics Using ROS 2. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; IEEE: London, UK, 2023; pp. 5493–5500. [Google Scholar]
- Zhang, J.; Keramat, F.; Yu, X.; Hernández, D.M.; Queralta, J.P.; Westerlund, T. Distributed Robotic Systems in the Edge-Cloud Continuum with ROS 2: A Review on Novel Architectures and Technology Readiness. In Proceedings of the 2022 Seventh International Conference on Fog and Mobile Edge Computing (FMEC), Paris, France, 12–15 December 2022; IEEE: Paris, France, 2022; pp. 1–8. [Google Scholar]
- Zhao, J.; Sun, J.; Cai, Z.; Wang, L.; Wang, Y. End-to-End Deep Reinforcement Learning for Image-Based UAV Autonomous Control. Appl. Sci. 2021, 11, 8419. [Google Scholar] [CrossRef]
- Pérez-Higueras, N.; Otero, R.; Caballero, F.; Merino, L. Hunavsim: A ROS 2 Human Navigation Simulator for Benchmarking Human-Aware Robot Navigation. IEEE Robot. Autom. Lett. 2023, 8, 7130–7137. [Google Scholar] [CrossRef]
- Hoseinnezhad, R. A Comprehensive Review of Deep Learning Techniques in Mobile Robot Path Planning: Categorization and Analysis. Appl. Sci. 2025, 15, 2179. [Google Scholar] [CrossRef]
- Fahmy, T.A.; Shehata, O.M.; Maged, S.A. Trajectory Aware Deep Reinforcement Learning Navigation Using Multichannel Cost Maps. Robotics 2024, 13, 166. [Google Scholar] [CrossRef]
- Jin, P.; Li, T.; Pan, Y.; Hu, K.; Xu, N.; Ying, W.; Jin, Y.; Kang, H. A Context-Aware Navigation Framework for Ground Robots in Horticultural Environments. Sensors 2024, 24, 3663. [Google Scholar] [CrossRef]
- Seisa, A.S.; Satpute, S.G.; Lindqvist, B.; Nikolakopoulos, G. An Edge-Based Architecture for Offloading Model Predictive Control for UAVs. Robotics 2022, 11, 80. [Google Scholar] [CrossRef]
- Singh, R.; Ren, J.; Lin, X. A Review of Deep Reinforcement Learning Algorithms for Mobile Robot Path Planning. Vehicles 2023, 5, 1423–1451. [Google Scholar] [CrossRef]
- Choi, D.; Venepally, J.R.; Kim, D. Path-Planning and Navigation for Robots Considering Human–Robot–Environment Interactions in Supermarket Environments. Electronics 2025, 14, 2111. [Google Scholar] [CrossRef]
- Kalateh, S.; Estrada-Jimenez, L.A.; Nikghadam, S.; Barata, J. A Systematic Review on Multimodal Emotion Recognition: Building Blocks, Current State, Applications, and Challenges. IEEE Access 2024, 12, 103976–104019. [Google Scholar] [CrossRef]
- Le, H.; Saeedvand, S.; Hsu, C.-C. A Comprehensive Review of Mobile Robot Navigation Using Deep Reinforcement Learning Algorithms in Crowded Environments. J. Intell. Robot. Syst. 2024, 110, 158. [Google Scholar] [CrossRef]
- Storiale, F.; Ferrentino, E.; Chiacchio, P. Robot-Agnostic Interaction Controllers Based on ROS. Appl. Sci. 2022, 12, 3949. [Google Scholar] [CrossRef]
- Papavasileiou, A.; Nikoladakis, S.; Basamakis, F.P.; Aivaliotis, S.; Michalos, G.; Makris, S. A Voice-Enabled ROS2 Framework for Human–Robot Collaborative Inspection. Appl. Sci. 2024, 14, 4138. [Google Scholar] [CrossRef]
- Cimurs, R.; Lee, J.H.; Suh, I.H. Goal-Oriented Obstacle Avoidance with Deep Reinforcement Learning in Continuous Action Space. Electronics 2020, 9, 411. [Google Scholar] [CrossRef]
- Asiminari, G.; Moysiadis, V.; Kateris, D.; Busato, P.; Wu, C.; Achillas, C.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Integrated Route-Planning System for Agricultural Robots. AgriEngineering 2024, 6, 657–677. [Google Scholar] [CrossRef]

| Comparison Dimension | ROS 1 | ROS 2 |
|---|---|---|
| Communication protocol | Custom TCP/UDP | DDS-based, configurable QoS |
| System architecture | Centralised (requires roscore) | Decentralised discovery |
| Platform support | Linux only | Linux, Windows, macOS supported |
| Nodes and processes | One node per process | Multiple nodes per process supported |
| Thread model | Fixed callback mechanism | Flexible executors |
| Lifecycle management | Not supported | Supported via lifecycle nodes |
| Embedded system support | Limited (via rosserial) | Full support (via micro-ROS) |
| Parameter system | Runtime access via XMLRPC | Compile-time typing, service-based access |
| Security mechanism | Requires extension (e.g., SROS) | Built-in DDS security mechanisms |
| Multi-robot support | Requires multi-master setup | Native support via namespaces and DDS isolation |
| Method | Planning Paradigm | Typical Scenario | Core Advantages | Main Limitations | Future Improvements | ROS Integration |
|---|---|---|---|---|---|---|
| DWA | Heuristic-based velocity sampling | Static or mildly dynamic environments | High real-time performance; easy ROS integration | Lacks accurate prediction of dynamic obstacles | Behaviour modelling; semantic understanding | Default in move_base |
| TEB | Graph-based trajectory optimisation | Constrained or narrow spaces | Trajectory smoothness; kinematic feasibility | Depends on initial path; global planner reliance | Robust optimisation; multi-sensor fusion | Supported via teb_local_planner package |
| MPPI | Stochastic sampling-based control | Highly dynamic and nonlinear environments | Handles complex dynamics; adaptive control | High computational demand; real-time sensitive | Parallelised sampling; variance reduction | Experimental via custom nodes |
| Reinforcement Learning | Policy learning via trial and error | Unknown or dynamic environments. | Adaptive; generalizable across tasks. | Requires large training data; poor transferability. | Integrated via Gym/Gazebo | hybrid with DWA |
| Vision-based planning | Semantic image-based perception (CNN, Transformer) | Unmapped, cluttered or low-sensor scenarios. | Scene understanding; reduced map dependency. | Sensitive to lighting, occlusion; limited depth cues. | Implemented in Arena-Rosnav | YOLO plugins |
| Method | Latency | Success Rate | Environment Suitability | Computation Time | References |
|---|---|---|---|---|---|
| DWA | 20–50 ms control cycle | 95% (static), 72.5% (dynamic) | Static or mildly dynamic; obstacle speed ≤ 0.5 m/s. | <10 ms per sample; CPU load <30% | [1,2,3,10,32] |
| TEB | 80–150 ms per optimization cycle | +21.05% (with EKF-based prediction) | Narrow or constrained spaces; turning angle < 60°. | 100–200 ms per cycle on i5/i7 CPUs | [8,10,23,24,25] |
| MPPI | >200 ms per cycle (1000–2000 samples) | 92–96% in dynamic dense scenes | High-speed, nonlinear, unstructured environments. | 300–500 ms (CPU); <150 ms with GPU | [36,37,38,39] |
| Reinforcement Learning | 150–250 ms (policy inference) | 87–94% in known scenarios; less generalizable | Dynamic/uncertain environments. | Varies; real time on GPU/Jetson possible | [31,34] |
| Vision-based planning | 100–200 ms per frame (YOLOv3 Tiny) | 90% in good lighting; lower in occlusion | Unstructured or unmapped environments. | 120 ms/frame on embedded devices | [35] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Z.; Wang, S.; Chen, K.; Wang, F. ROS-Based Navigation and Obstacle Avoidance: A Study of Architectures, Methods, and Trends. Sensors 2025, 25, 4306. https://doi.org/10.3390/s25144306
Wei Z, Wang S, Chen K, Wang F. ROS-Based Navigation and Obstacle Avoidance: A Study of Architectures, Methods, and Trends. Sensors. 2025; 25(14):4306. https://doi.org/10.3390/s25144306
Chicago/Turabian StyleWei, Zhe, Sen Wang, Kangyelin Chen, and Fang Wang. 2025. "ROS-Based Navigation and Obstacle Avoidance: A Study of Architectures, Methods, and Trends" Sensors 25, no. 14: 4306. https://doi.org/10.3390/s25144306
APA StyleWei, Z., Wang, S., Chen, K., & Wang, F. (2025). ROS-Based Navigation and Obstacle Avoidance: A Study of Architectures, Methods, and Trends. Sensors, 25(14), 4306. https://doi.org/10.3390/s25144306