
Sensitivity of Line-of-Sight Estimation to Measurement Errors in L-Shaped Antenna Arrays for 3D Localization for In-Orbit Servicing †

Abstract
1. Introduction
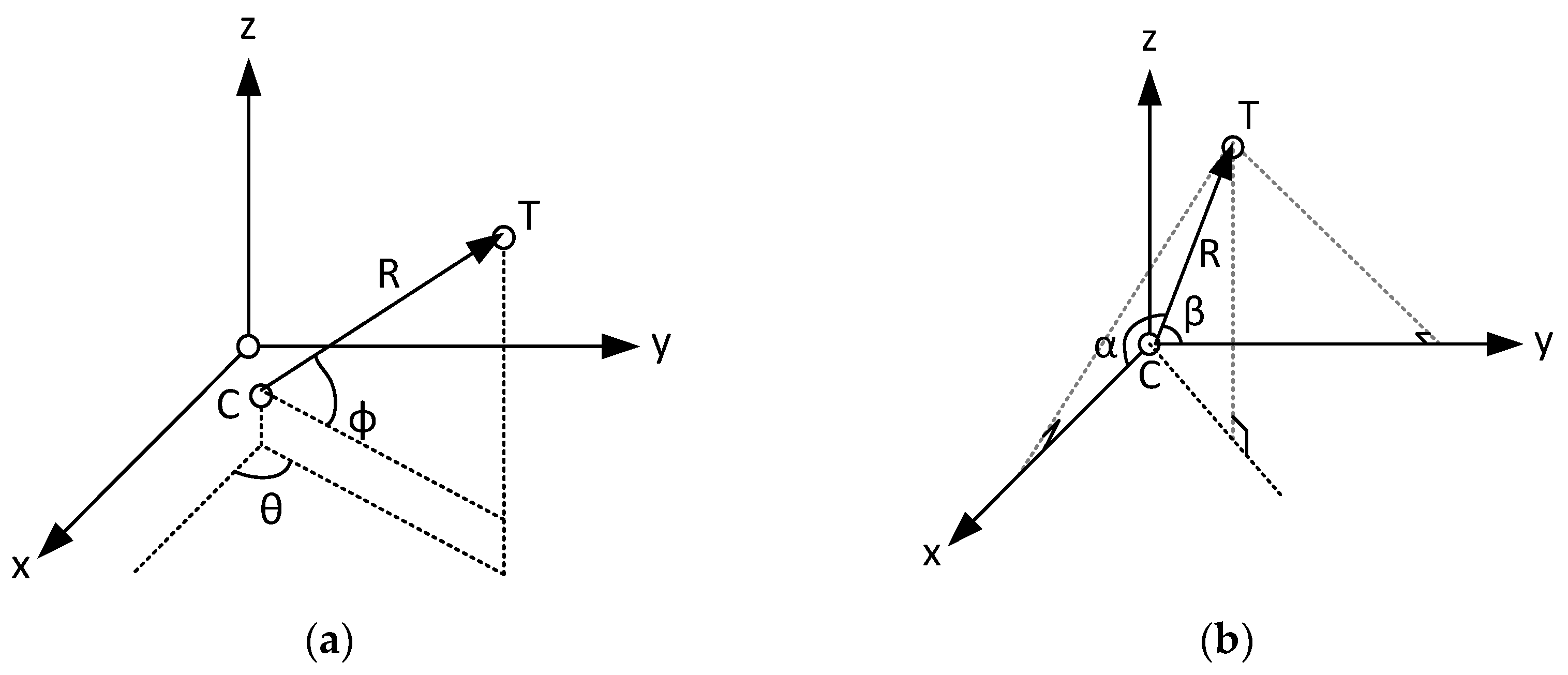
- The 3D localization model applicable for the H-ISL system in the Cartesian coordinate system is derived;
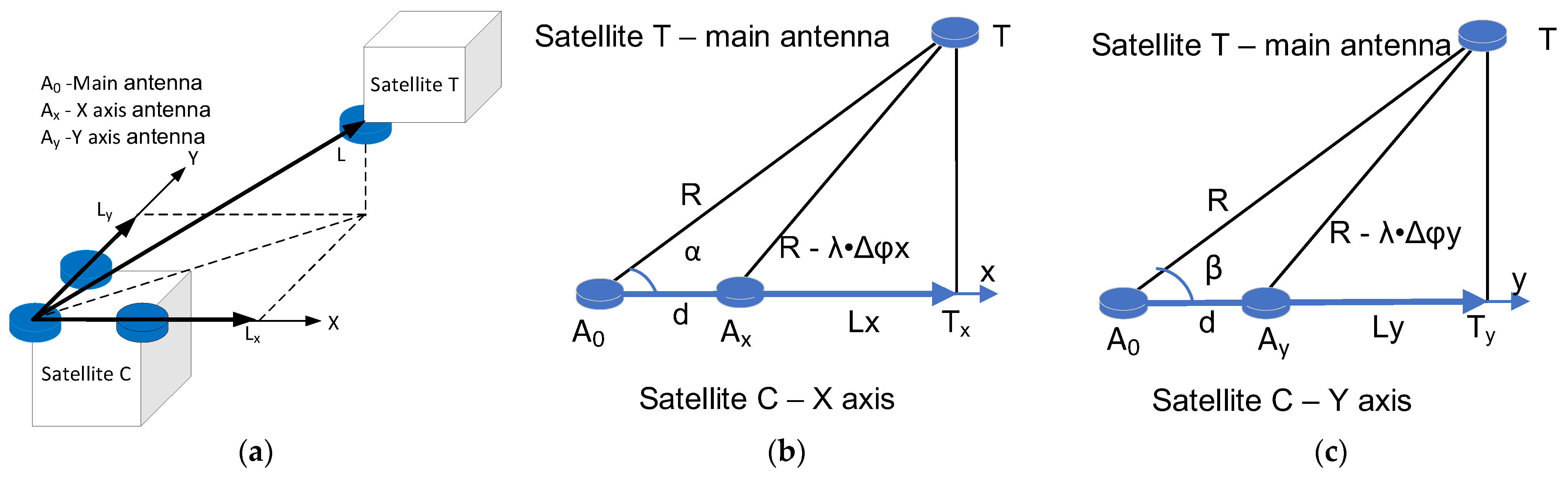
- The H-ISL setup based on an L-shaped antenna array enables two kinds of range—coarse and fine—measurement and LoS estimation;
- A sensitivity analysis is conducted to evaluate the impact of ranging and phase measurement errors on LoS estimation.
- Initial work on peer-to-peer communication within the IOS domain, outlining the development scope of the L-shaped phased array;
- A network protocol stack is proposed to address key limitations of conventional ISL systems, including the following: (i) support for time division multiple access (TDMA) among more than two devices; (ii) integration of a metrology channel for range measurements; and (iii) network-wide time distribution;
- Coarse range measurements are performed via round-trip time (RTT) estimation in the baseband processor, following a calibration phase;
- Fine range measurements are achieved through phase-based techniques, utilizing frequency diversity for phase disambiguation;
- LoS estimation is enabled by combined ranging and phase difference measurements.
2. 3D Localization Models for L-Shaped Antenna Arrays
3. The Hybrid-ISL Metrology Setup
4. A Hybrid-ISL System with Ranging and LoS Support
4.1. CCSDS’ Proximity-1 Network Stack
- Physical Layer (PHY): at the lowest level, the PHY defines the hardware interfaces and signaling characteristics for transmitting data over space communication links. It specifies parameters such as modulation, coding, and frequency allocation to ensure reliable transmission in the harsh space environment.
- Data Link Layer (DLL): it provides mechanisms for framing, error control, and flow control to ensure the integrity and efficiency of data transmission. It ensures reliable delivery of data using Automatic Repeat reQuest (ARQ) and provides services for both acknowledged and unacknowledged data transfers. It includes protocols for packetization, error detection and correction, and management of data link connections. This layer furthermore consists of a Medium Access Control (MAC) and Coding and Synchronization sublayers.
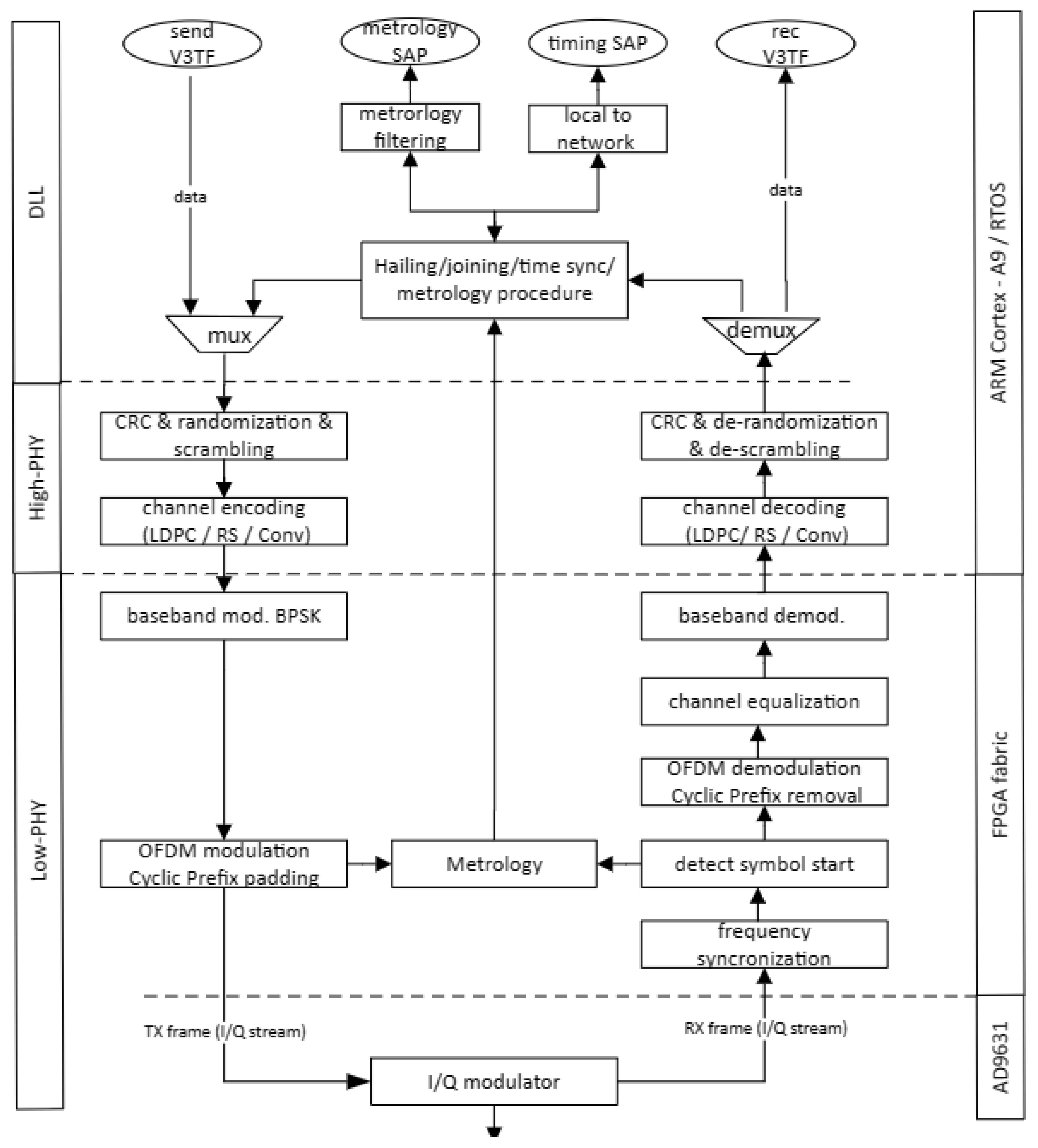
4.2. Proposed Network Protocol Stack for Hybrid-ISL System
- The stream from the DLL will be first randomized and then scrambled;
- After that channel encoding is performed, possible candidates for channel encoding are the Reed–Solomon (RS), low-density parity check (LDPC), or convolutional coding, in compliance with [5];
- The channel encoding is followed by a Binary Phase Shift Keying (BPSK) baseband modulation;
- The 1024 subcarrier data is then applied to a 1024-point Inverse Fast Fourier Transform (IFFT) block, implementing the orthogonal frequency division modulation (OFDM). Note: the sub-carrier spacing is 15 kHz and a 15.36 MHz sampling frequency and 9 MHz channel width is applied. The first 212 and, respectively, the last 211 subcarriers are used as a guard interval, and the remaining 600 subcarriers are used for data transmission. The direct current (DC) component is not modulated. Each OFDM symbol is preceded by a cyclic prefix (CP), with a length of 72 samples (4.68 µs); thus the total length of a symbol is 1096 samples (with a total duration of 71.35 µs);
- The resulting symbol is then modulated into RF frequencies by the AD9631 transceiver chip.
- Carrier frequency synchronization is is carried out as in [26]
- The beginning of a symbol in the I/Q stream is detected by an autocorrelation function of the prescribed and the received preamble;
- The cyclic prefix is removed;
- The OFDM demodulation takes place in a 1024-point FFT block;
- Channel equalization is carried out based on the received preamble;
- Baseband demodulation;
- Channel decoding;
- Descrambling and normalization is executed.
4.3. PHY Support for Coarse and Fine Ranging
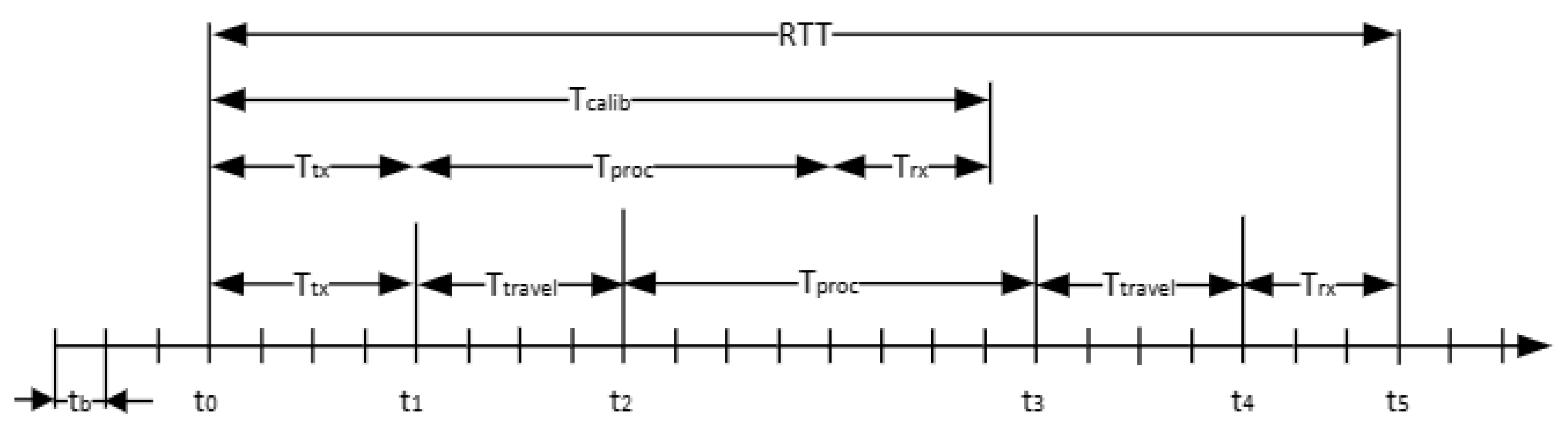
4.3.1. Coarse Range Measurement
- t0—the baseband processor sent the OFDM burst to the analog front-end;
- t1—the OFDM burst is aired on the antenna;
- t2—the burst is received by the counterpart PHY;
- t3—the counterpart PHY processes the OFDM burst and airs a response;
- t4—the front-end receives the OFDM burst;
- t5—the PHY detects the beginning of the OFDM burst.
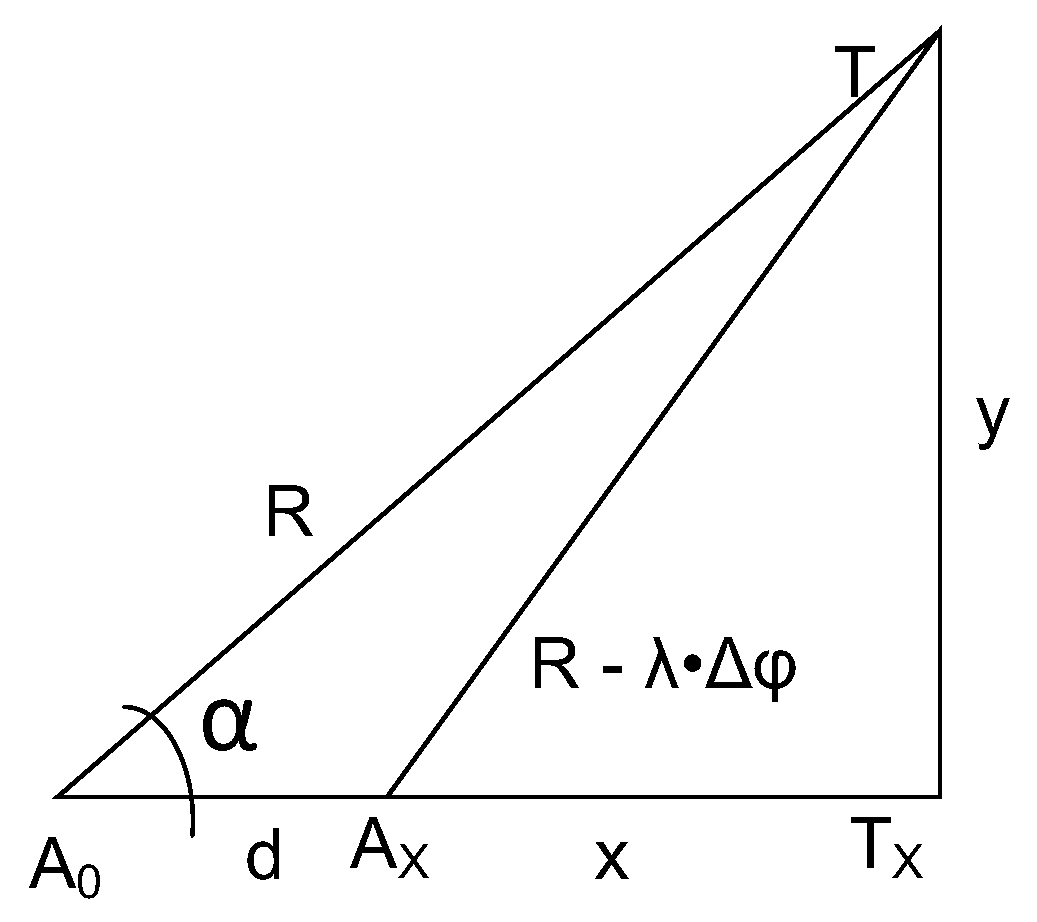
4.3.2. Fine Range Measurement
| Algorithm 1 Search algorithm for solving full cycles in Equation (8) |
| Inputs: —phase measurements; N—maximum number of cycles; ε—threshold for n2 = 0:N ; if (abs(n1− round(n1)) < ε) break; end if; end for; return n1 and n2 |
4.3.3. Phase-Difference Measurement
5. Sensitivity Analysis with Respect to Measurement Errors
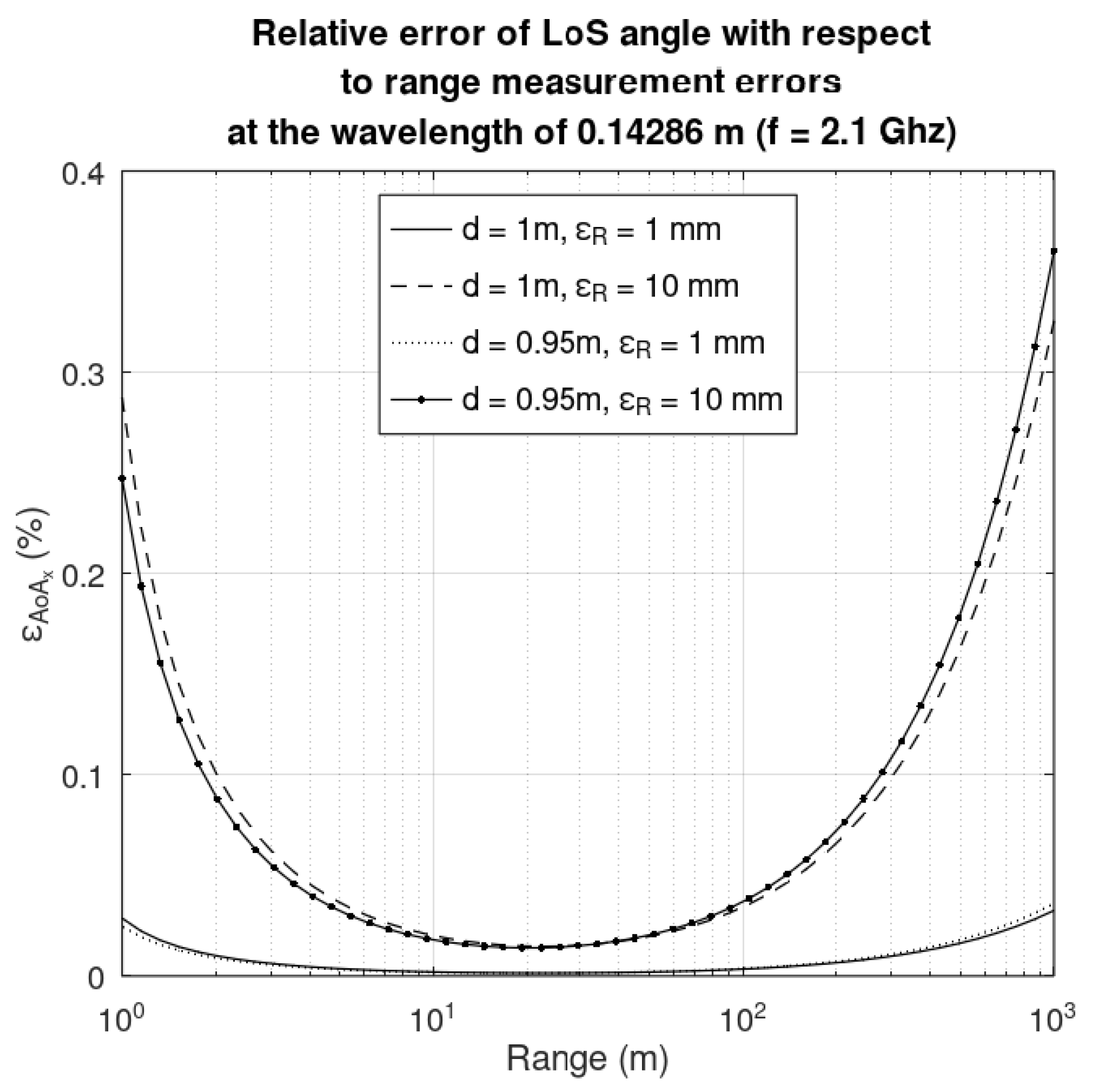
5.1. Sensitivity of the LoS Angle with Respect to Range Measurement Errors
5.2. Sensitivity of the LoS Angle with Respect to Phase Measurement Errors
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Derivation of the Proposed 3D Localization Model

Appendix B. The Calculus for the Projection Lengths
Appendix C. Fine Range Measurement—A Numerical Example

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Example 1 | Example 2 | Formula | |||
| Carrier 1 | Carrier 2 | Carrier 1 | Carrier 2 | ||
| phase meas. resolution, Rφ | 0.01 rad/s | ||||
| actual distance, D | 2 m | 1.56 m | |||
| frequency (GHz), f1 and f2 | 2.05 | 2.25 | 2.05 | 2.15 | |
| wavelength (mm), λ1 and λ2 | 145.85 | 132.89 | 145.85 | 139.89 | λn = c/fn |
| virtual wavelength, λvirtual (mm) | 12.93 | 6.8 | λvirtual = |λ1 − λ2| | ||
| maximum range (m), Rmax | 3 | 6 | Rmax = 2/(1/λ1 − 1/λ2) | ||
| full cycles, k1 and k2 | 13 | 14 | 10 | 11 | k = floor(D/λ)) |
| remaining phase (rad/s), φr1 and φr2 | 0.6 | 0 | 0.6 | 0.15 | φrn = 2π(D mod λnn) |
| input to algorithm | 60 | 0 | 60 | 15 | N = floor(φr/Rφ) |
| output of the algorithm | 13 | 14 | 10 | 11 | |
| estimated distance (m), d1 and d2 | 1.92 | 2 | 1.48 | 1.54 | d = λnkn + φrn Rφ λn/2/π |
| relative error (%) | 4 | 0 | 5 | 1 | E = |D − dn|/D |
References
- Radhakrishnan, R.; Edmonson, W.W.; Afghah, F.; Rodriguez-Osorio, R.M.; Pinto, F.; Burleigh, S.C. Survey of Inter-Satellite Communication for Small Satellite Systems: Physical Layer to Network Layer View. IEEE Commun. Surv. Tutorials 2016, 18, 2442–2473. [Google Scholar] [CrossRef]
- The European Space Agency. ESA Moves Ahead with In-Orbit Servicing Missions. Available online: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/ESA_moves_ahead_with_In-Orbit_Servicing_missions2 (accessed on 28 January 2025).
- CCSDS 883.0-R-1; Spacecraft Onboard Interface Services—High Data Rate Wireless Proximity Network Communications. CCSDS: Washington, DC, USA, 2021.
- Reshef, E.; Cordeiro, C. Future Directions for Wi-Fi 8 and Beyond. IEEE Commun. Mag. 2022, 60, 50–55. [Google Scholar] [CrossRef]
- CCSDS 210.0-G-2; Proximity-1 Space Link Protocol—Rationale, Architecture, and Scenarios. CCSDS: Washington, DC, USA, 2013.
- CCSDS 211.1-B-4; Proximity-1 Space Link Protocol—Physical Layer, Recommended Standard. CCSDS: Washington, DC, USA, 2013.
- CCSDS 211.2-B-3; Proximity-1 Space Link Protocol—Coding and Synchronization Sublayer, Recommended Standard. CCSDS: Washington, DC, USA, 2019.
- CCSDS 211.0-B-6; Proximity-1, Space Link Protocol—Data Link Layer, Recommended Standard. CCSDS: Washington, DC, USA, 2020.
- Chu, M.; Lin, S.; Xu, S.; Wang, G.; Jia, J.; Chang, R. An Omnidirectional Compliant Docking Strategy for Non-Cooperative On-orbit Targets: Principle, Design, Modeling, and Experiment. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 8364–8379. [Google Scholar] [CrossRef]
- Kirei, B.S.; Ratiu, O. Sensitivity to Measurement Errors of an L-Shaped Phase Array for 3D Localization in Inter-Satellite Links. In Proceedings of the 2024 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 7–8 November 2024; pp. 1–5. [Google Scholar] [CrossRef]
- CCSDS 414.1-B-3; Pseudo-Noise (PN) Ranging Systems. CCSDS: Washington, DC, USA, 2022.
- Zhao, N.; Chang, Q.; Wang, H.; Zhang, Z. An Unbalanced QPSK-Based Integrated Communication-Ranging System for Distributed Spacecraft Networking. Sensors 2020, 20, 5803. [Google Scholar] [CrossRef] [PubMed]
- Johnson, D.H.; Dudgeon, D.E. Array Signal Processing: Concepts and Techniques; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Tayem, N.; Hussain, A.A.; Moinuddeen, A.; Radaydeh, R.M.; Alghazo, J.M. Improved Performance Two-Dimensional Direction of Arrival Estimation Algorithm with Unknown Number of Noncoherent Sources. In Proceedings of the 2022 14th International Conference on Computational Intelligence and Communication Networks (CICN), Al-Khobar, Saudi Arabia, 4–6 December 2022; pp. 590–594. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, X.; Chen, Y. An Improved Reduced-Dimension Robust Capon Beamforming Method Using Krylov Subspace Techniques. Sensors 2024, 24, 7152. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Li, Q.; Zhou, M.; Wang, J. Phase-Calibration-Based 3-D Beamspace Matrix Pencil Algorithm for Indoor Passive Positioning and Tracking. IEEE Sens. J. 2023, 23, 19670–19683. [Google Scholar] [CrossRef]
- Dai, Z.; He, Y.; Tran, V.; Trigoni, N.; Markham, A. DeepAoANet: Learning Angle of Arrival from Software Defined Radios with Deep Neural Networks. IEEE Access 2022, 10, 3164–3176. [Google Scholar] [CrossRef]
- Ly, P.Q.C.; Elton, S.D.; Gray, D.A. AOA estimation of two narrowband signals using interferometry. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 12–15 October 2010; pp. 1004–1009. [Google Scholar] [CrossRef]
- Wu, X.; Gui, S.; Zhou, L.; Wu, Y.; Yan, F.; Tian, Z. Indoor Single Station 3D Localization Based on L-shaped Sparse Array. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q.; Fu, J.; He, Y. A Semi-Real-Valued Capon Algorithm for 2-D DOA Estimation of Coherent Signals with L-Shape Array. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 288–292. [Google Scholar] [CrossRef]
- Crisan, A.-M. Inter-Satellite Radio Frequency Ranging Techniques for OFDM Communication Systems. In Proceedings of the 2018 International Conference on Communications (COMM), Bucharest, Romania, 14–16 June 2018; pp. 391–394. [Google Scholar] [CrossRef]
- Crisan, A.M.; Martian, A.; Cacoveanu, R.; Coltuc, D. Distance estimation in OFDM inter-satellite links. Measurement 2020, 154, 107479. [Google Scholar] [CrossRef]
- AMD. ZCU102 Evaluation Board—User Guide. UG1182 (v1.7); AMD: Santa Clara, CA, USA, 2023. [Google Scholar]
- Analog Devices. AD-FMCOMMS5-EBZ User Guide. Available online: https://wiki.analog.com/resources/eval/user-guides/ad-fmcomms5-ebz (accessed on 14 February 2024).
- Crisan, A.; Anghel, C.; Cacoveanu, R. A Novel Synchronization Algorithm for Hybrid Inter-Satellite Link Establishment. In Proceedings of the AICT 2019, Nice, France, 28 July–2 August 2019; pp. 1–5, ISSN 2308-4030. [Google Scholar]
- Minori, K.; Yasunori; Hironori, K. Distance Measuring Apparatus. Japan, JP5340414B2, 26 May 2011. [Google Scholar]
- Crisan, A.M.; Martian, A.; Cacoveanu, R.; Coltuc, D. Angle-of-Arrival Estimation in Formation Flying Satellites: Concept and Demonstration. IEEE Access 2019, 7, 114116–114130. [Google Scholar] [CrossRef]
- Ren, G.; Sun, C.; Ni, H.; Bai, Y. OFDM-Based Precise Ranging Technique in Space Applications. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2217–2221. [Google Scholar] [CrossRef]
- Space Frequency Coordination Group. Frequency Channel Pan for In-situ Lunar Data Relay Satellites. Recommendation SFGP 42-1. 12 June 2024. Available online: https://ntrs.nasa.gov/api/citations/20240011047/downloads/2024_Ka-Band_LunaNet_Spectrum.pdf? (accessed on 16 June 2025).



| Proximity-1 | Hybrid-ISL | ||
| PHY layer | Frequency band | UHF | S-band |
| Bandwidth | 1.5 MHz | 10 MHz | |
| Data rate | up to 1 MBps | >1 MBps | |
| Modulation scheme | OFDM | PSK | |
| Ranging support | yes | yes | |
| Line-of-sight support | no | yes | |
| DLL layer | Synchronization | Standardized | Custom algorithm |
| Channel access | Combined time/frequency division | Frequency division | |
| Channel coding | Convolutional | Read–Solomon (configurable) | |
| Quality of service | ARQ/expedited | expedited |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kirei, B.S.; Rațiu, V.; Rațiu, O. Sensitivity of Line-of-Sight Estimation to Measurement Errors in L-Shaped Antenna Arrays for 3D Localization for In-Orbit Servicing. Sensors 2025, 25, 3946. https://doi.org/10.3390/s25133946
Kirei BS, Rațiu V, Rațiu O. Sensitivity of Line-of-Sight Estimation to Measurement Errors in L-Shaped Antenna Arrays for 3D Localization for In-Orbit Servicing. Sensors. 2025; 25(13):3946. https://doi.org/10.3390/s25133946
Chicago/Turabian StyleKirei, Botond Sándor, Vlad Rațiu, and Ovidiu Rațiu. 2025. "Sensitivity of Line-of-Sight Estimation to Measurement Errors in L-Shaped Antenna Arrays for 3D Localization for In-Orbit Servicing" Sensors 25, no. 13: 3946. https://doi.org/10.3390/s25133946
APA StyleKirei, B. S., Rațiu, V., & Rațiu, O. (2025). Sensitivity of Line-of-Sight Estimation to Measurement Errors in L-Shaped Antenna Arrays for 3D Localization for In-Orbit Servicing. Sensors, 25(13), 3946. https://doi.org/10.3390/s25133946