Onboard LiDAR–Camera Deployment Optimization for Pavement Marking Distress Fusion Detection




Abstract
1. Introduction
2. Related Works
2.1. Pavement Marking Detection
2.2. Sensor Deployment Optimization
3. Methodology
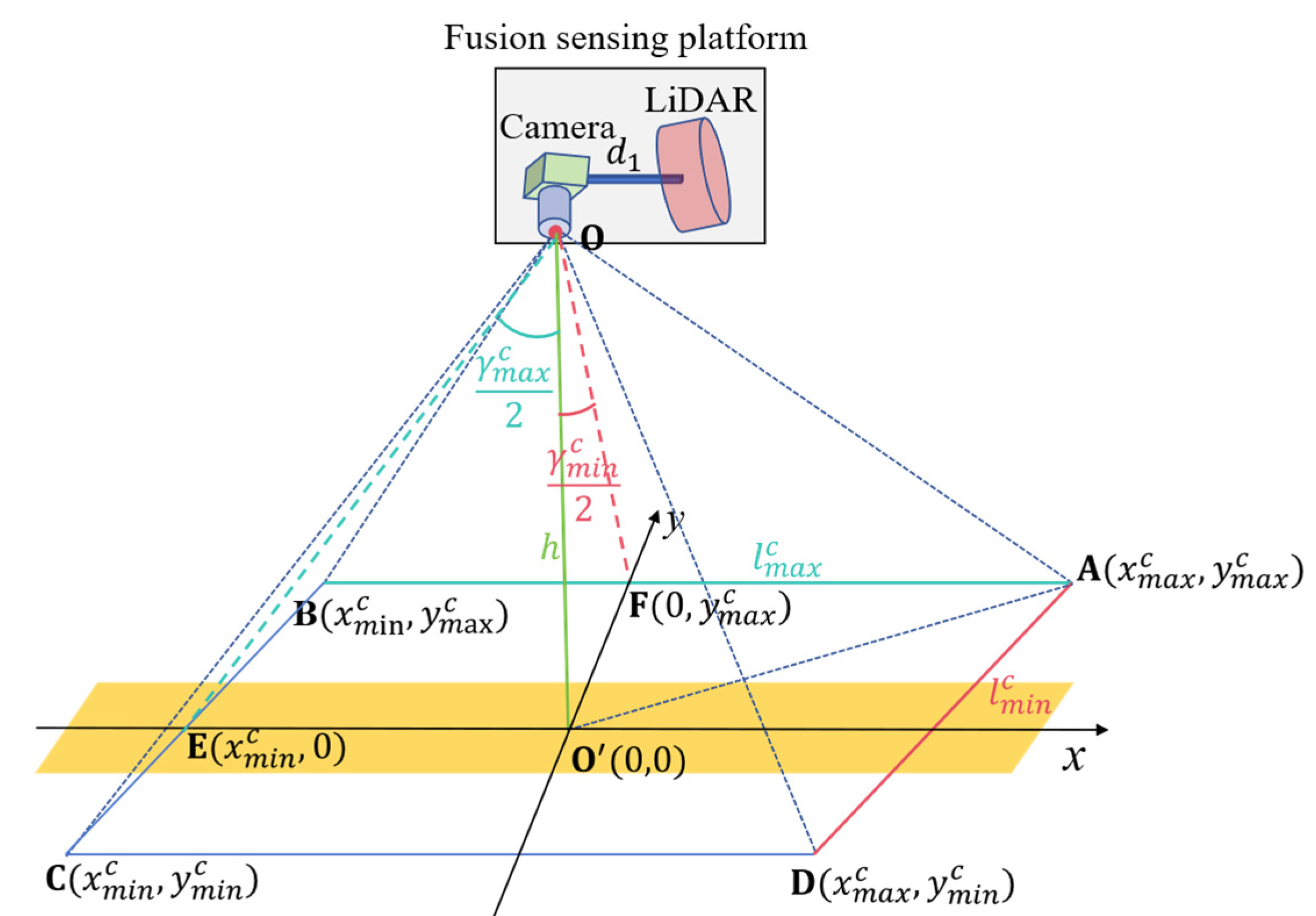
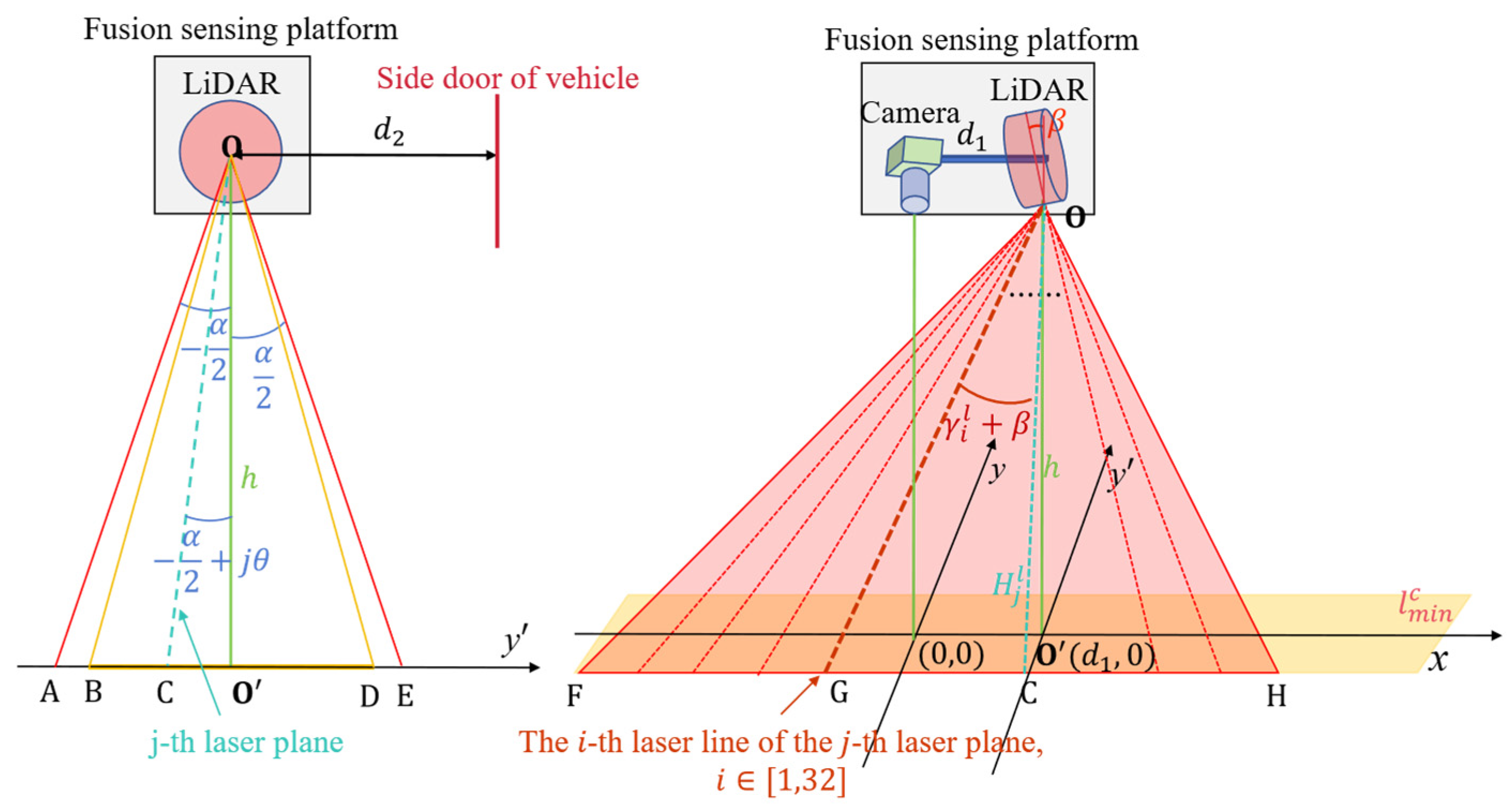
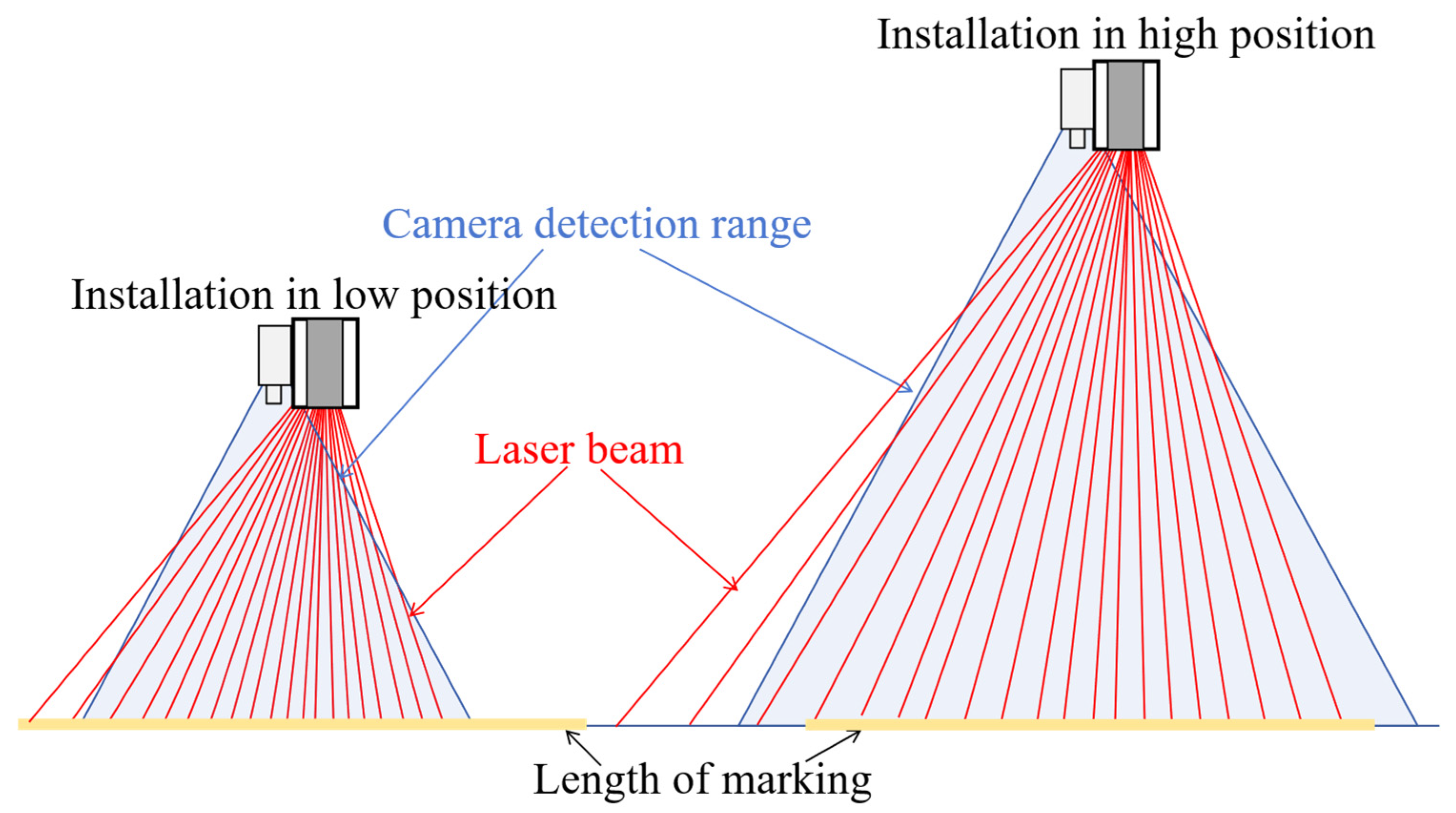
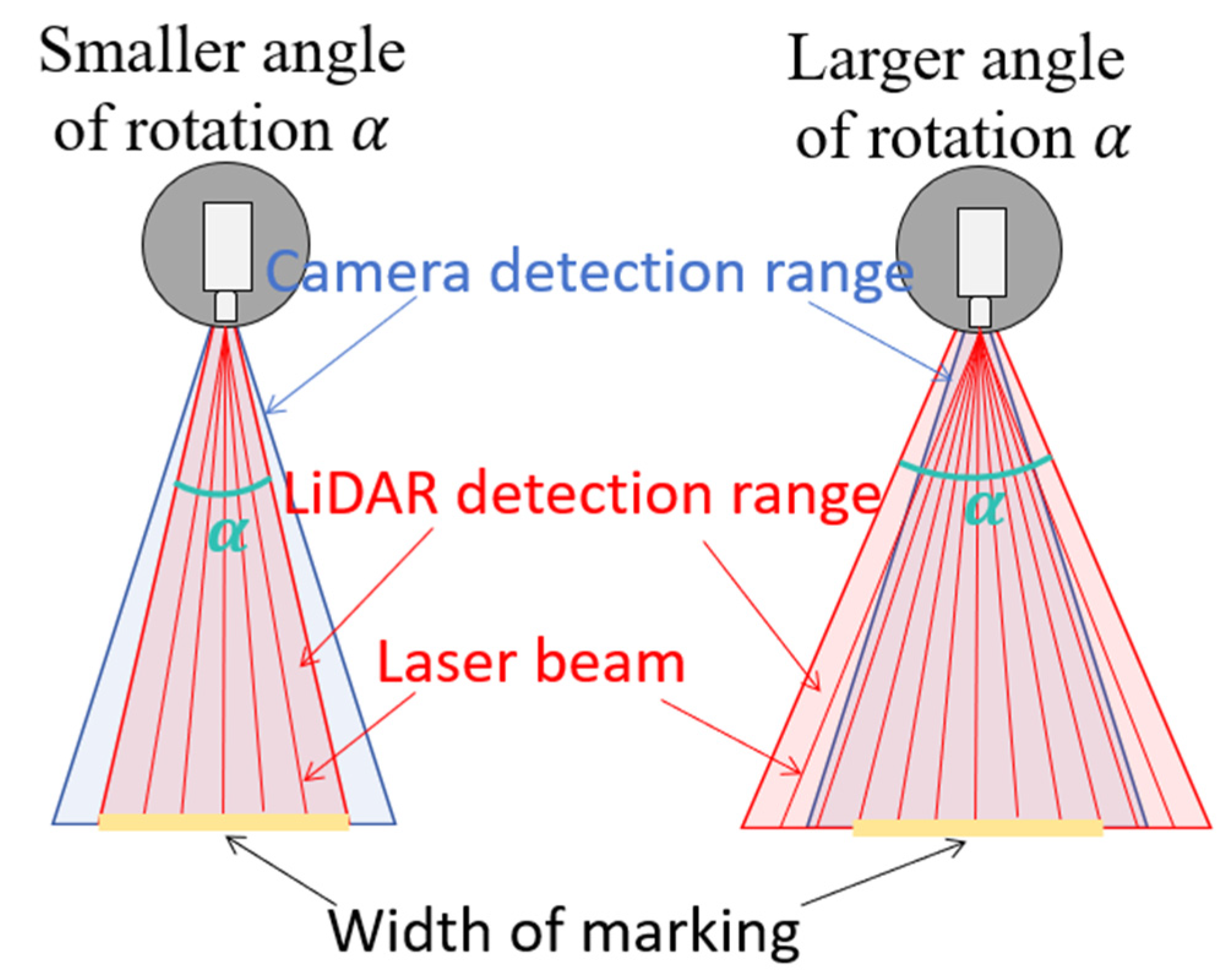
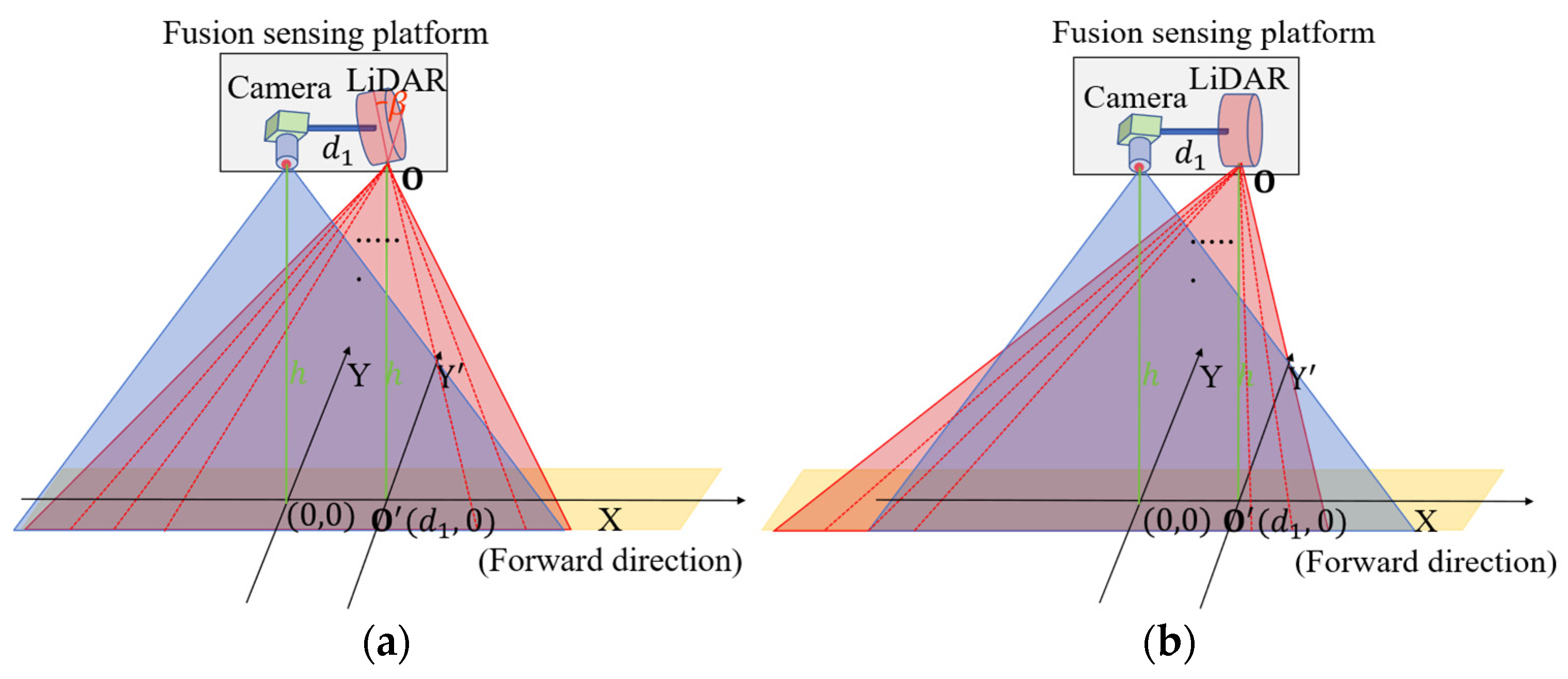
3.1. Problem Formulation
- The pavement marking coverage area for data fusion should be as large as possible. That is, the detection length for pavement marking should be as long as possible due to the width of the pavement marking being fixed.
- 2.
- There should be as many laser points that fall on pavement marking as possible.
3.2. Solution Algorithm
4. Case Study
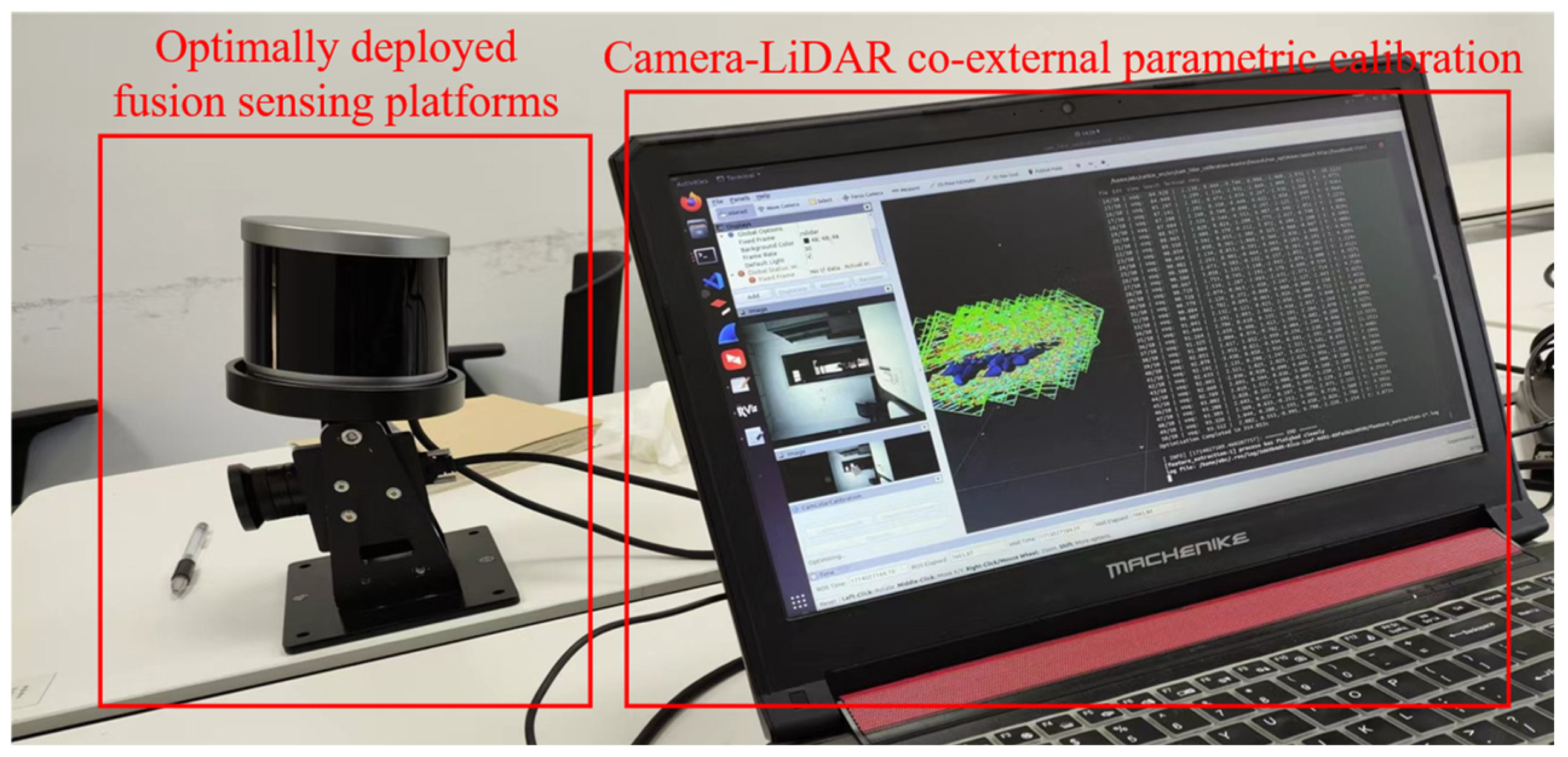
4.1. Experimental Setup
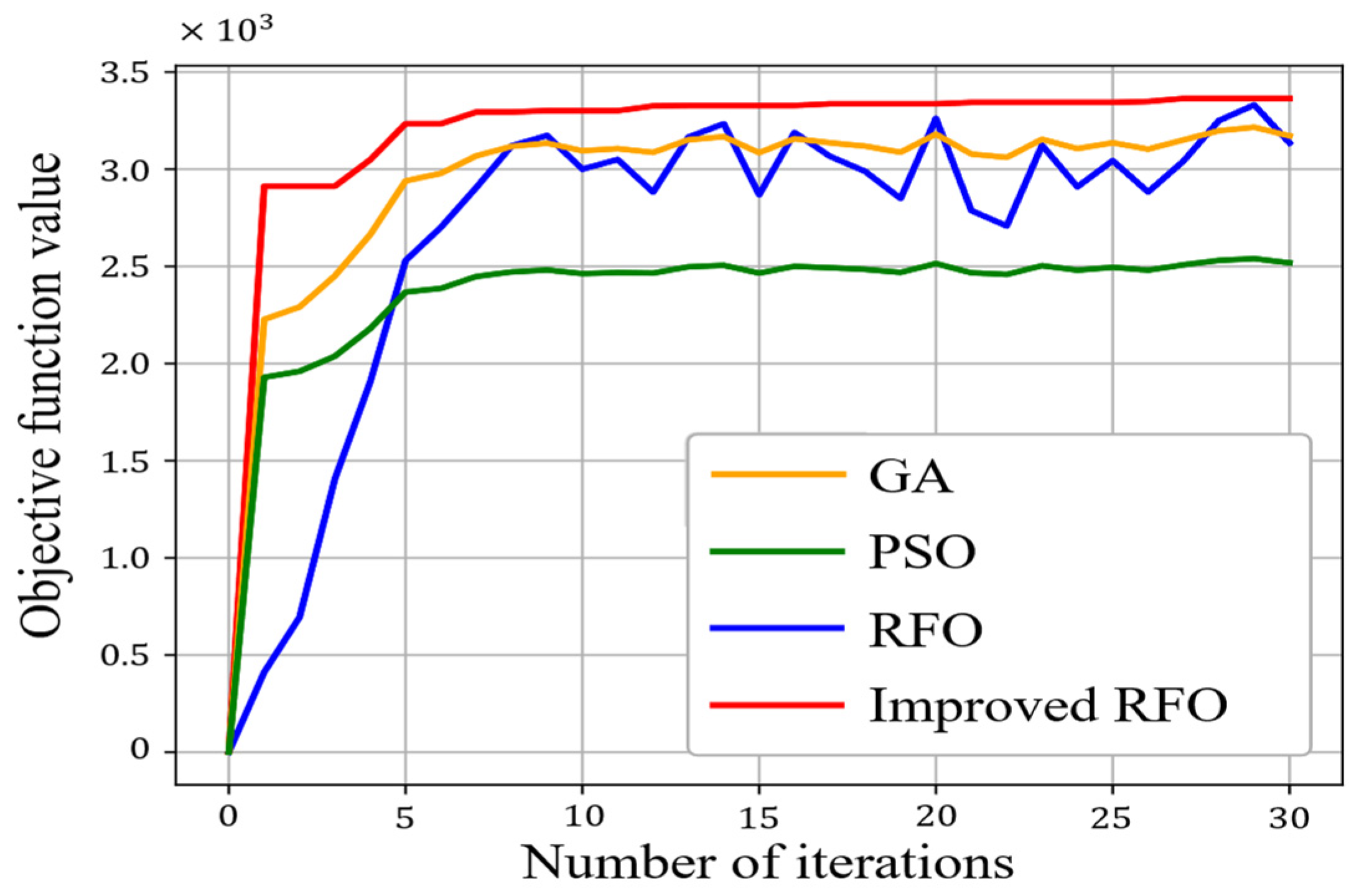
4.2. Comparison of Solution Algorithms
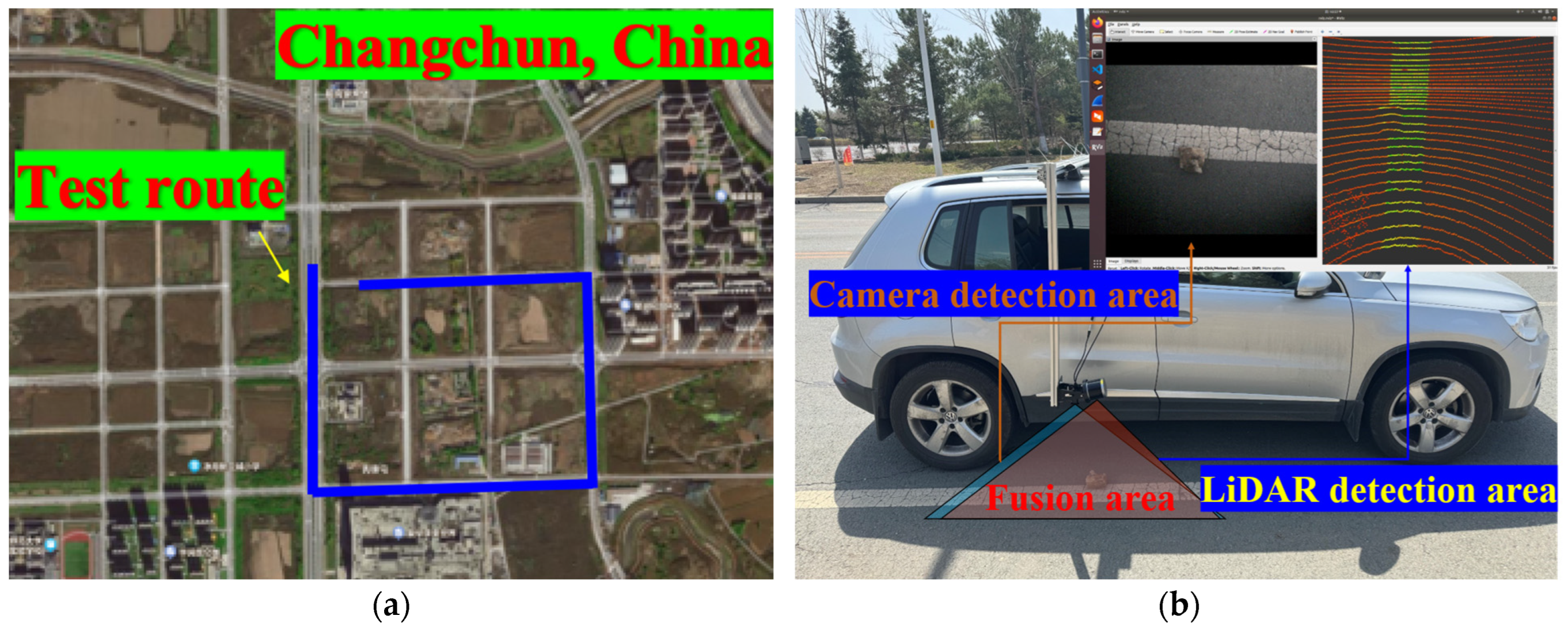
4.3. Field Test with Optimum Solution
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carlson, P.J.; Park, E.S.; Andersen, C.K. Benefits of Pavement Markings A Renewed Perspective Based on Recent and Ongoing Research. Transp. Res. Rec. 2009, 2107, 59–68. [Google Scholar] [CrossRef]
- Masliah, M.; Bahar, G.; Hauer, E. Application of innovative time series methodology to relationship between retroreflectivity of pavement markings and crashes. Transp. Res. Rec. 2007, 2019, 119–126. [Google Scholar] [CrossRef]
- Lin, H.Y.; Chang, C.K.; Tran, V.L. Lane detection networks based on deep neural networks and temporal information. Alex. Eng. J. 2024, 98, 10–18. [Google Scholar] [CrossRef]
- Lu, F.F.; Sun, G.X.; Yu, H.Q.; Huang, Y.J.; Zhou, T.; Yao, S.Y. LPCNet: End-to-end lane detection with PnP compression and condition DETR. Displays 2025, 87, 102902. [Google Scholar] [CrossRef]
- Seo, H.; Shi, Y.F.; Fu, L. Automatic Damage Detection of Pavement through DarkNet Analysis of Digital, Infrared, and Multi-Spectral Dynamic Imaging Images. Sensors 2024, 24, 464. [Google Scholar] [CrossRef]
- Lin, C.Y.; Sun, G.H.; Gong, B.W.; Liu, H.; Liu, H.C. Pavement Marking Worn Identification and Classification Using Low-Channel LiDAR. IEEE Trans. Instrum. Meas. 2025, 74, 5006010. [Google Scholar] [CrossRef]
- Guan, Y.Y.; Hu, J.B.; Wang, R.H.; Cao, Q.Y.; Xie, F.C. Research on the nighttime visibility of white pavement markings. Heliyon 2024, 10, e36533. [Google Scholar] [CrossRef]
- Mazzoni, L.N.; Vasconcelos, K.; Albarracín, O.; Bernucci, L.; Linhares, G. Field Data Analysis of Pavement Marking Retroreflectivity and Its Relationship with Paint and Glass Bead Characteristics. Appl. Sci. 2024, 14, 4205. [Google Scholar] [CrossRef]
- Lu, C.H.; Shao, B.E. Environment-Aware Multiscene Image Enhancement for Internet of Things Enabled Edge Cameras. IEEE Syst. J. 2021, 15, 3439–3449. [Google Scholar] [CrossRef]
- Chimba, D.; Kidando, E.; Onyango, M. Evaluating the Service Life of Thermoplastic Pavement Markings: Stochastic Approach. J. Transp. Eng. Part B-Pavements 2018, 144, 04018029. [Google Scholar] [CrossRef]
- Lin, C.Y.; Sun, G.H.; Tan, L.D.; Gong, B.W.; Wu, D.Y. Mobile LiDAR Deployment Optimization: Towards Application for Pavement Marking Stained and Worn Detection. IEEE Sens. J. 2022, 22, 3270–3280. [Google Scholar] [CrossRef]
- Li, L.; Luo, W.T.; Wang, K.C.P. Lane Marking Detection and Reconstruction with Line-Scan Imaging Data. Sensors 2018, 18, 1635. [Google Scholar] [CrossRef]
- Wang, H.; Liu, J.H.; Dong, H.R.; Shao, Z. A Survey of the Multi-Sensor Fusion Object Detection Task in Autonomous Driving. Sensors 2025, 25, 2794. [Google Scholar] [CrossRef]
- Yuan, X.Y.; Liu, Y.; Xiong, T.F.; Zeng, W.; Wang, C. Semantic Fusion Algorithm of 2D LiDAR and Camera Based on Contour and Inverse Projection. Sensors 2025, 25, 2526. [Google Scholar] [CrossRef]
- McCall, J.C.; Trivedi, M.M. Video-based lane estimation and tracking for driver assistance: Survey, system, and evaluation. IEEE Trans. Intell. Transp. Syst. 2006, 7, 20–37. [Google Scholar] [CrossRef]
- Eckelmann, S.; Trautmann, T.; Zhang, X.Y.; Michler, O. Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection. In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Electr Network, Paris, France, 6–8 July 2021; pp. 69–77. [Google Scholar]
- Borkar, A.; Hayes, M.; Smith, M.T. A Novel Lane Detection System With Efficient Ground Truth Generation. IEEE Trans. Intell. Transp. Syst. 2012, 13, 365–374. [Google Scholar] [CrossRef]
- Son, J.; Yoo, H.; Kim, S.; Sohn, K. Real-time illumination invariant lane detection for lane departure warning system. Expert Syst. Appl. 2015, 42, 1816–1824. [Google Scholar] [CrossRef]
- Sulistyaningrum, D.R.; Oranova, D.; Pramestya, R.H.; Mukhlash, I.; Setiyono, B.; Ahyudanari, E. Pavement Distress Classification Using Deep Learning Method Based on Digital Image. In Proceedings of the 2nd International Symposium on Transportation Studies in Developing Countries (ISTSDC), Kendari, Indonesia, 1–3 November 2019; pp. 188–190. [Google Scholar]
- Alzraiee, H.; Ruiz, A.L.; Sprotte, R. Detecting of Pavement Marking Defects Using Faster R-CNN. J. Perform. Constr. Facil. 2021, 35, 04021035. [Google Scholar] [CrossRef]
- Zhou, S.Y.; Jiang, Y.H.; Xi, J.Q.; Gong, J.W.; Xiong, G.M.; Chen, H.Y. A Novel Lane Detection based on Geometrical Model and Gabor Filter. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), San Diego (UCSD), San Diego, CA, USA, 21–24 June 2010; pp. 59–64. [Google Scholar]
- Zhang, A.; Wang, K.C.P.; Yang, E.; Li, J.Q.; Chen, C.; Qiu, Y. Pavement lane marking detection using matched filter. Measurement 2018, 130, 105–117. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Patel, A.; Wen, C.; Bullock, D.; Habib, A. Intensity Thresholding and Deep Learning Based Lane Marking Extraction and Lane Width Estimation from Mobile Light Detection and Ranging (LiDAR) Point Clouds. Remote Sens. 2020, 12, 1379. [Google Scholar] [CrossRef]
- Rastiveis, H.; Shams, A.; Sarasua, W.A.; Li, J. Automated extraction of lane markings from mobile LiDAR point clouds based on fuzzy inference. Isprs J. Photogramm. Remote Sens. 2020, 160, 149–166. [Google Scholar] [CrossRef]
- Hörster, E.; Lienhart, R. On the Optimal Placement of Multiple Visual Sensors; University of Augsburg: Augsburg, Germany, 2006. [Google Scholar]
- Geissler, F.; Gräfe, R. Optimized sensor placement for dependable roadside infrastructures. In Proceedings of the IEEE Intelligent Transportation Systems Conference (IEEE-ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2408–2413. [Google Scholar]
- Du, Y.C.A.; Wang, F.Q.; Zhao, C.; Zhu, Y.F.; Ji, Y.X. Quantifying the performance and optimizing the placement of roadside sensors for cooperative vehicle-infrastructure systems. Iet Intell. Transp. Syst. 2022, 16, 908–925. [Google Scholar] [CrossRef]
- Dey, J.; Taylor, W.; Pasricha, S. VESPA: A Framework for Optimizing Heterogeneous Sensor Placement and Orientation for Autonomous Vehicles. IEEE Consum. Electron. Mag. 2021, 10, 16–26. [Google Scholar] [CrossRef]
- Cao, Q.; Li, Z.H.; Tao, P.F.; Zhao, Y.H. Reallocation of Heterogeneous Sensors on Road Networks for Traffic Accident Detection. IEEE Trans. Instrum. Meas. 2023, 72, 1006911. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Cheng, Z.H.; Wang, Z.J.; Zhang, Z.Y.; Yao, X.P. Optimal Layout Method for Roadside LiDAR and Camera. IEEE Access 2024, 12, 26905–26918. [Google Scholar] [CrossRef]
- Polap, D.; Wozniak, M. Red fox optimization algorithm. Expert Syst. Appl. 2021, 166, 114107. [Google Scholar] [CrossRef]
- Zaborski, M.; Wozniak, M.; Mandziuk, J. Multidimensional Red Fox meta-heuristic for complex optimization. Appl. Soft Comput. 2022, 131, 109774. [Google Scholar] [CrossRef]
- Lanszki, J.; Bende, Z.; Nagyapáti, N.; Lanszki, Z.; Pongrácz, P. Optimal prey for red fox cubs-An example of dual optimizing foraging strategy in foxes from a dynamic wetland habitat. Ecol. Evol. 2023, 13, e10033. [Google Scholar] [CrossRef]
- Zheng, C.C.; Li, X.S.; You, J.; Liu, Y.; Bai, Y.R.; Hu, T. Ellipse Fitting Method Based on Pendulum Genetic Algorithm Particle Swarm Optimization for Well Diameter Measurement by Laser Distance Sensor. IEEE Sens. J. 2025, 25, 587–600. [Google Scholar] [CrossRef]
- Wang, M.H.; Wang, X.B.; Jiang, K.W.; Fan, B. Reinforcement Learning-Enabled Resampling Particle Swarm Optimization for Sensor Relocation in Reconfigurable WSNs. IEEE Sens. J. 2022, 22, 8257–8267. [Google Scholar] [CrossRef]
- Tsai, D.; Worrall, S.; Shan, M.; Lohr, A.; Nebot, E. Optimising the selection of samples for robust lidar camera calibration. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 2631–2638. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Features | Parameters |
|---|---|---|
| Camera | Frame Rate | 201.4 FPS |
| Resolution | 1280 × 1024 | |
| Focal Length | 3.5 mm | |
| Angle of View | H: 82.6°; V: 70.2° | |
| LiDAR | Horizontal FOV | 360° |
| Vertical FOV | −55° ~ +15° | |
| Frame Rate | 10 Hz ~ 20 Hz | |
| Channels | 32 | |
| Vertical Resolution | 1.44° ~ 2° | |
| Horizontal Resolution | 0.2° ~ 0.4° |
| Algorithms | Sensor Deployment Parameters | Fitness | Running Time (s) | ||
|---|---|---|---|---|---|
| (cm) | (°) | (°) | |||
| Global traversal | 0.53 | 60 | 12 | 3406.9 | 1127.38 |
| GA | 0.55 | 60 | 12 | 3207.2 | 105.38 |
| PSO | 0.59 | 60 | 6 | 2502.8 | 18.06 |
| RFO | 0.54 | 60 | 10 | 3195.4 | 37.1 |
| Improved RFO | 0.53 | 60 | 12 | 3406.9 | 22.50 |
| Objectives | Field Test | Mathematical Model | Error (%) |
|---|---|---|---|
| Length (m) | 0.58 | 0.62 | 6.45 |
| Point Number | 5127 | 5495 | 6.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.; Sun, W.; Sun, G.; Gong, B.; Liu, H. Onboard LiDAR–Camera Deployment Optimization for Pavement Marking Distress Fusion Detection. Sensors 2025, 25, 3875. https://doi.org/10.3390/s25133875
Lin C, Sun W, Sun G, Gong B, Liu H. Onboard LiDAR–Camera Deployment Optimization for Pavement Marking Distress Fusion Detection. Sensors. 2025; 25(13):3875. https://doi.org/10.3390/s25133875
Chicago/Turabian StyleLin, Ciyun, Wenjian Sun, Ganghao Sun, Bown Gong, and Hongchao Liu. 2025. "Onboard LiDAR–Camera Deployment Optimization for Pavement Marking Distress Fusion Detection" Sensors 25, no. 13: 3875. https://doi.org/10.3390/s25133875
APA StyleLin, C., Sun, W., Sun, G., Gong, B., & Liu, H. (2025). Onboard LiDAR–Camera Deployment Optimization for Pavement Marking Distress Fusion Detection. Sensors, 25(13), 3875. https://doi.org/10.3390/s25133875