

Design and Evaluation of a Soft Robotic Actuator with Non-Intrusive Vision-Based Bending Measurement





Abstract
1. Introduction
2. Description of the Soft Pneumatic Actuator
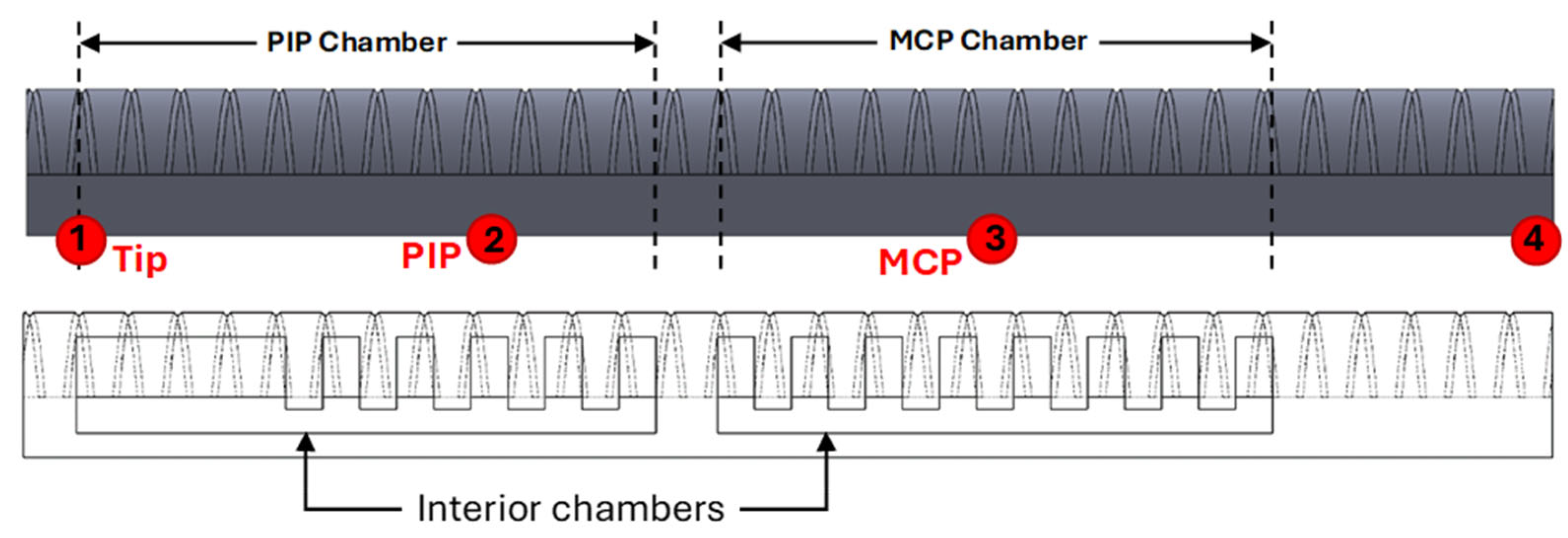
2.1. Design
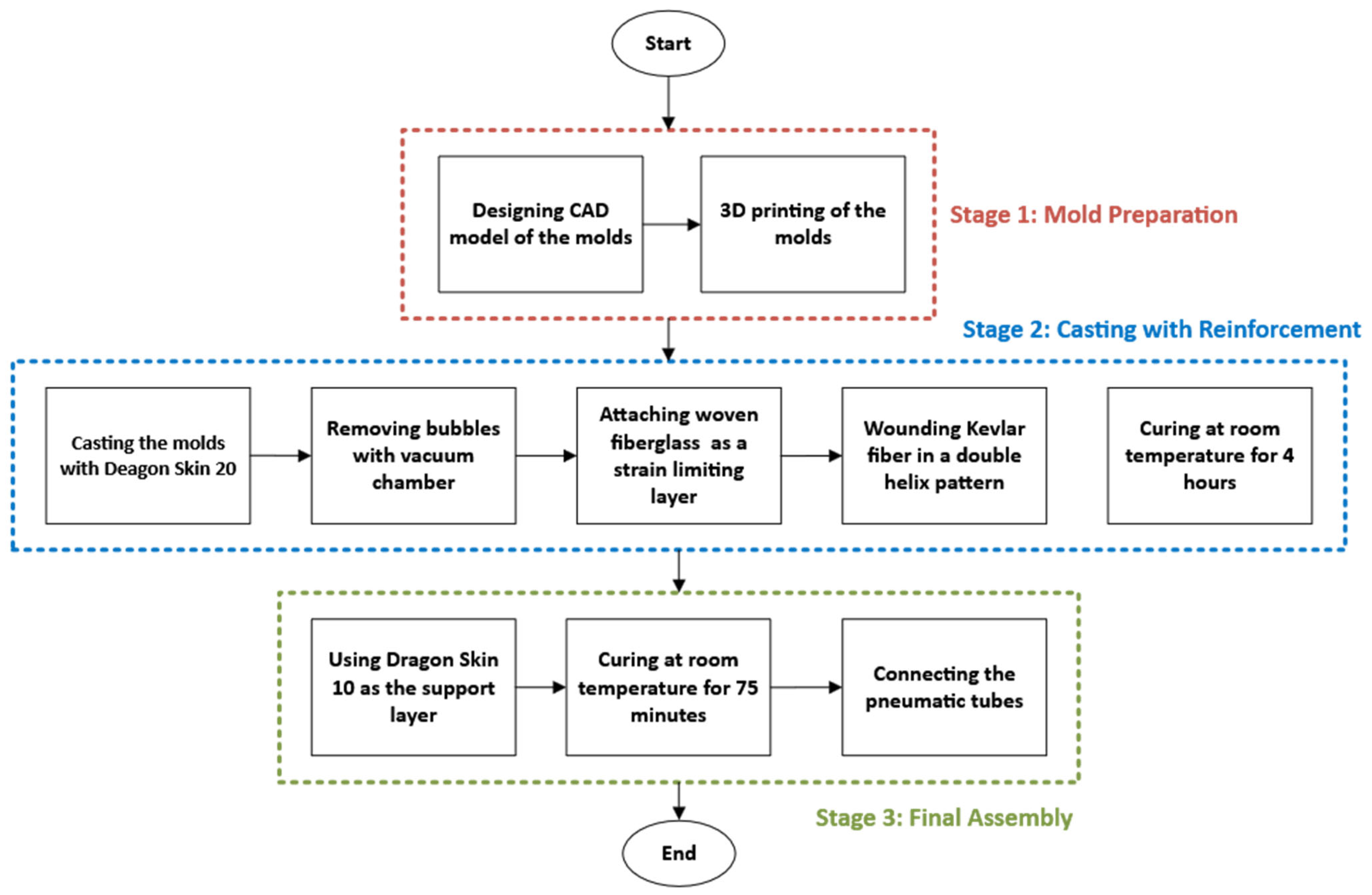
2.2. Fabrication Process
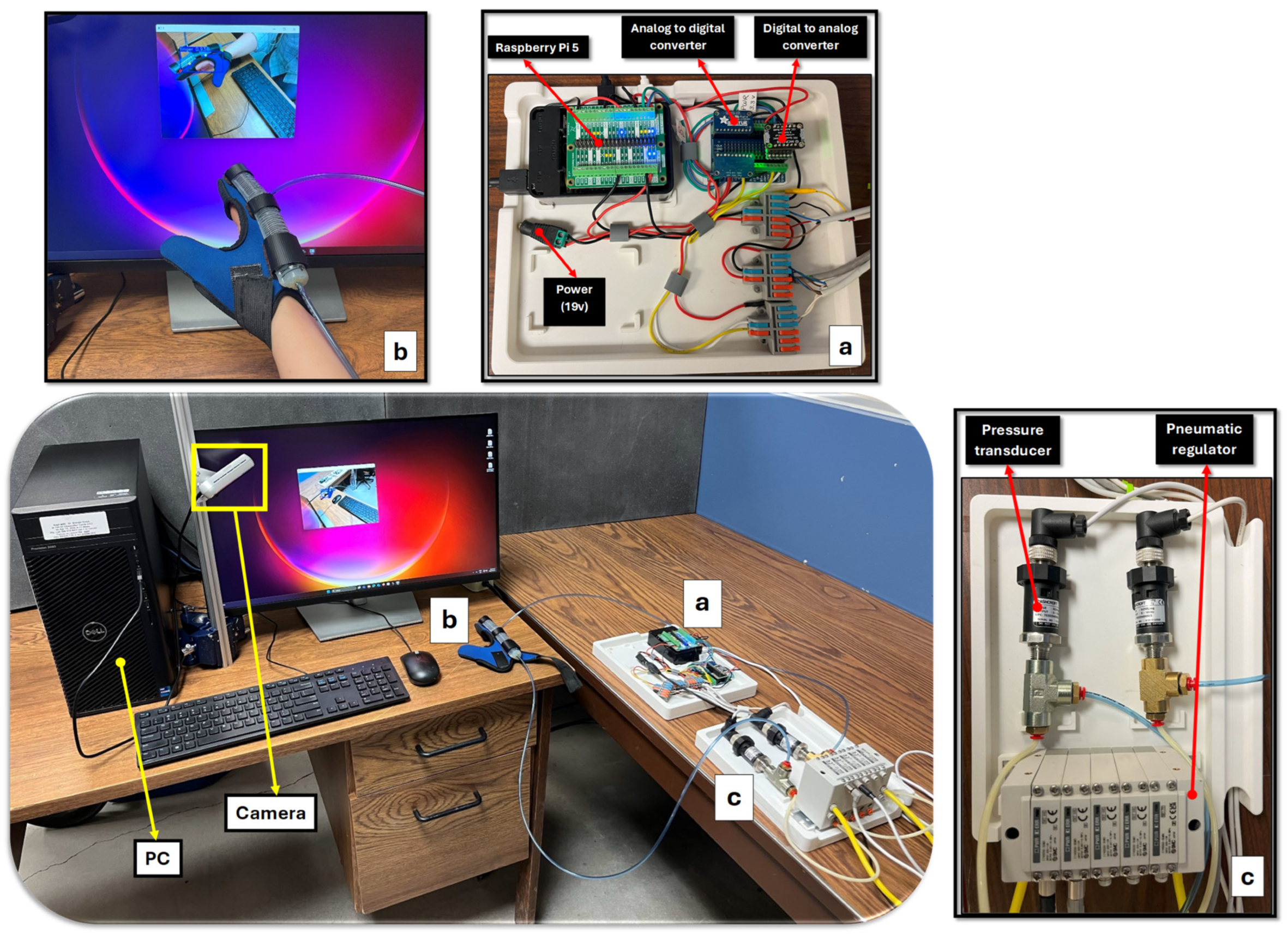
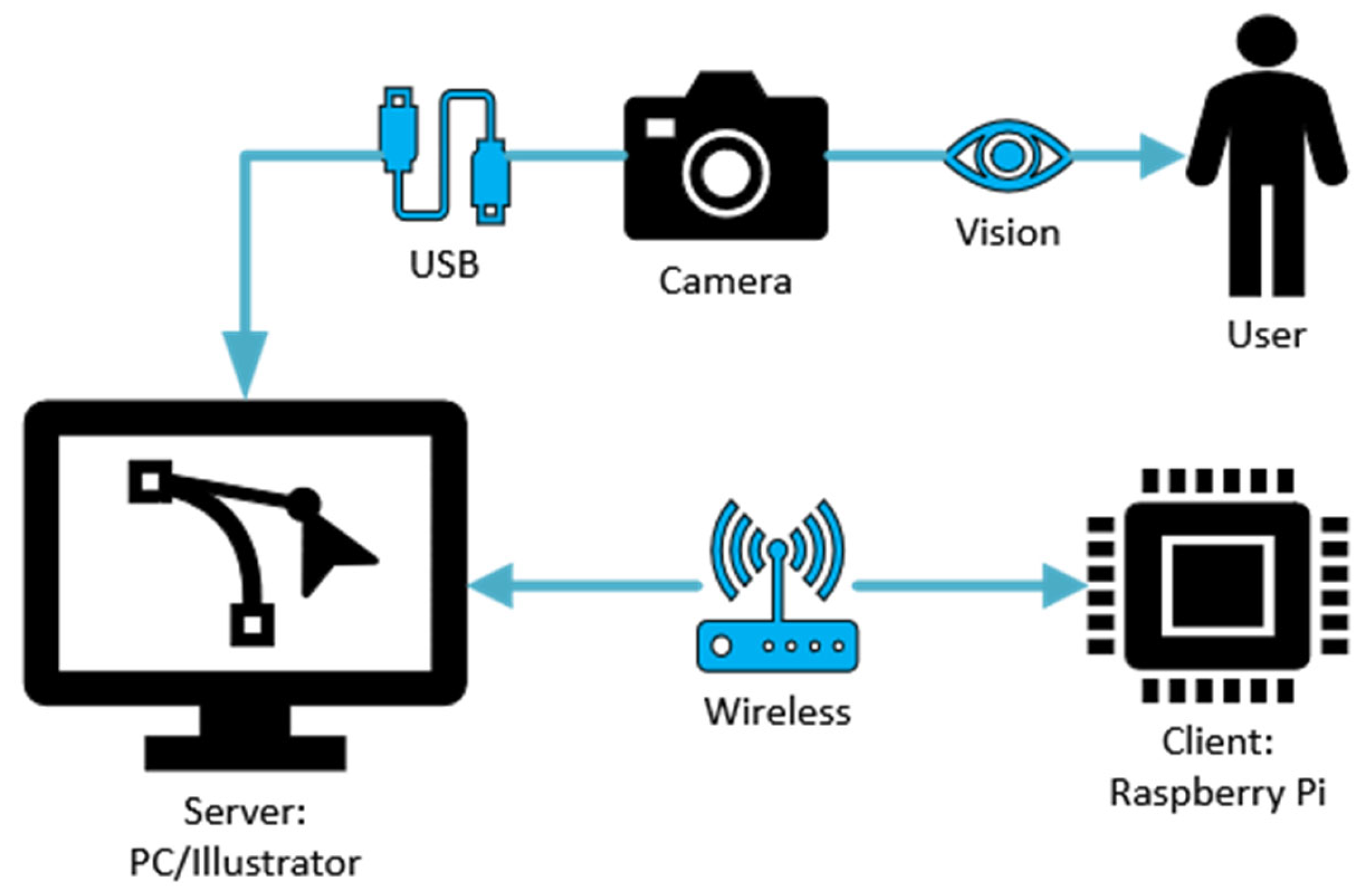
3. Experimental Setup
4. Bending Angle Measurement
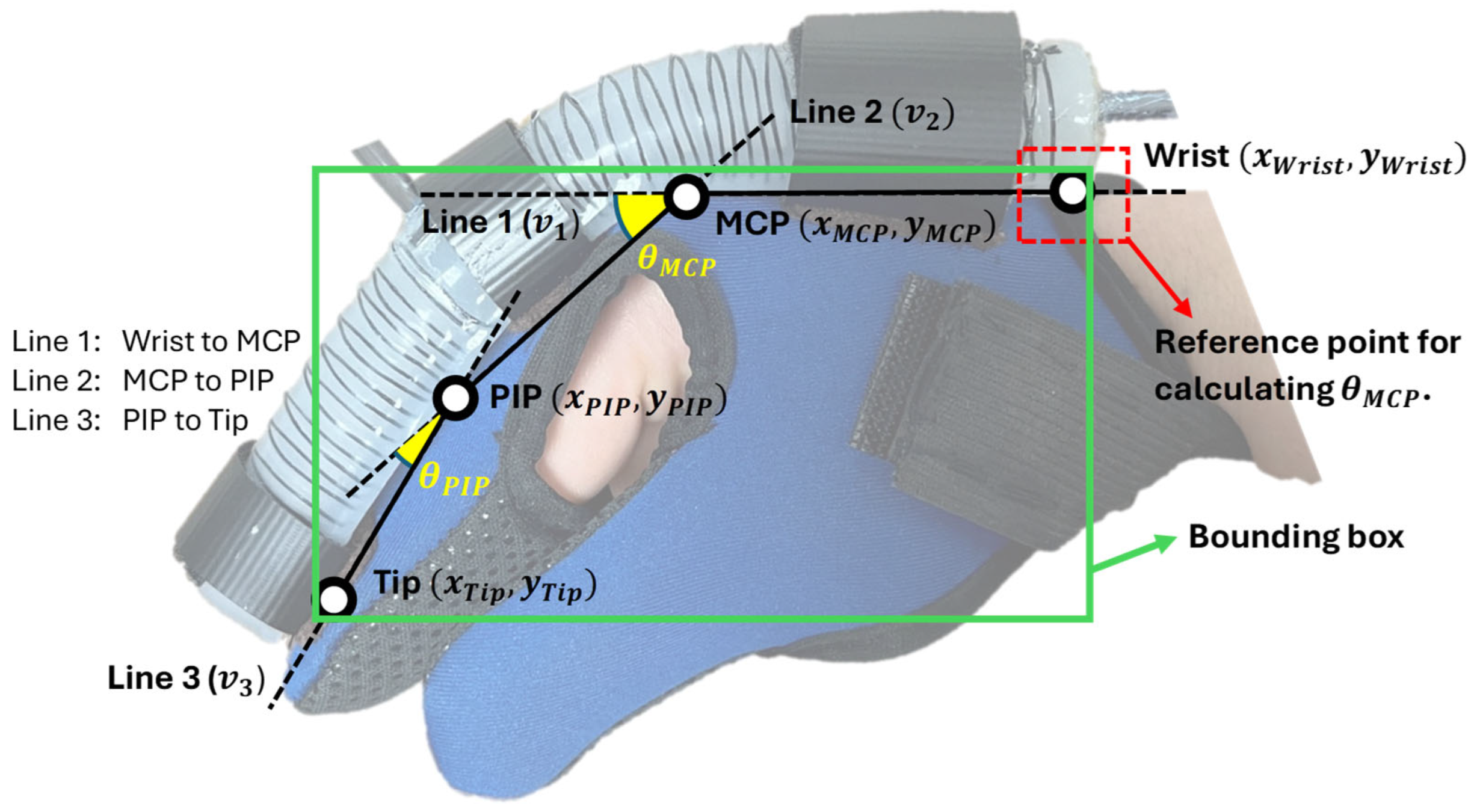
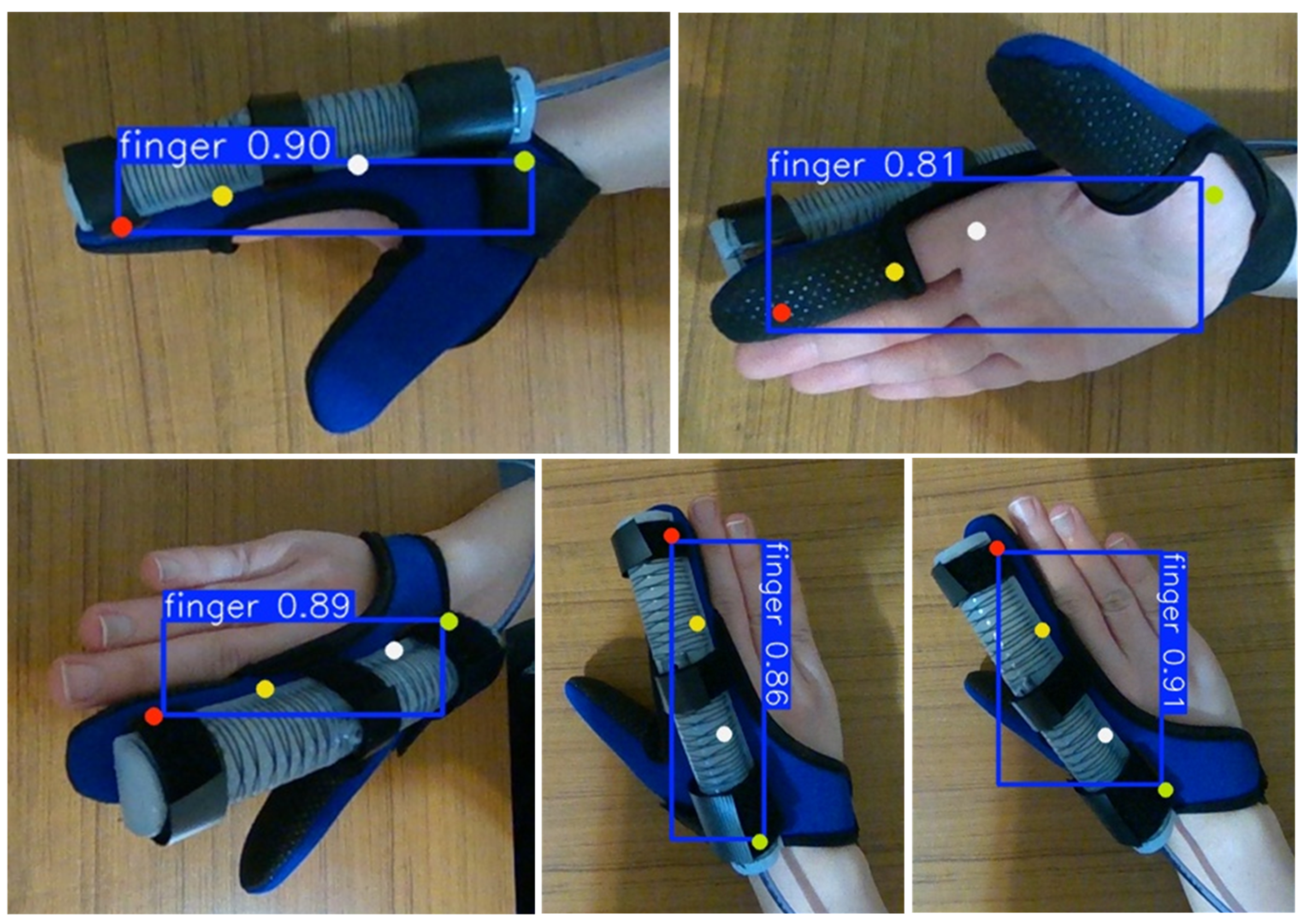
4.1. Joint Localization
4.2. Model Interpretation
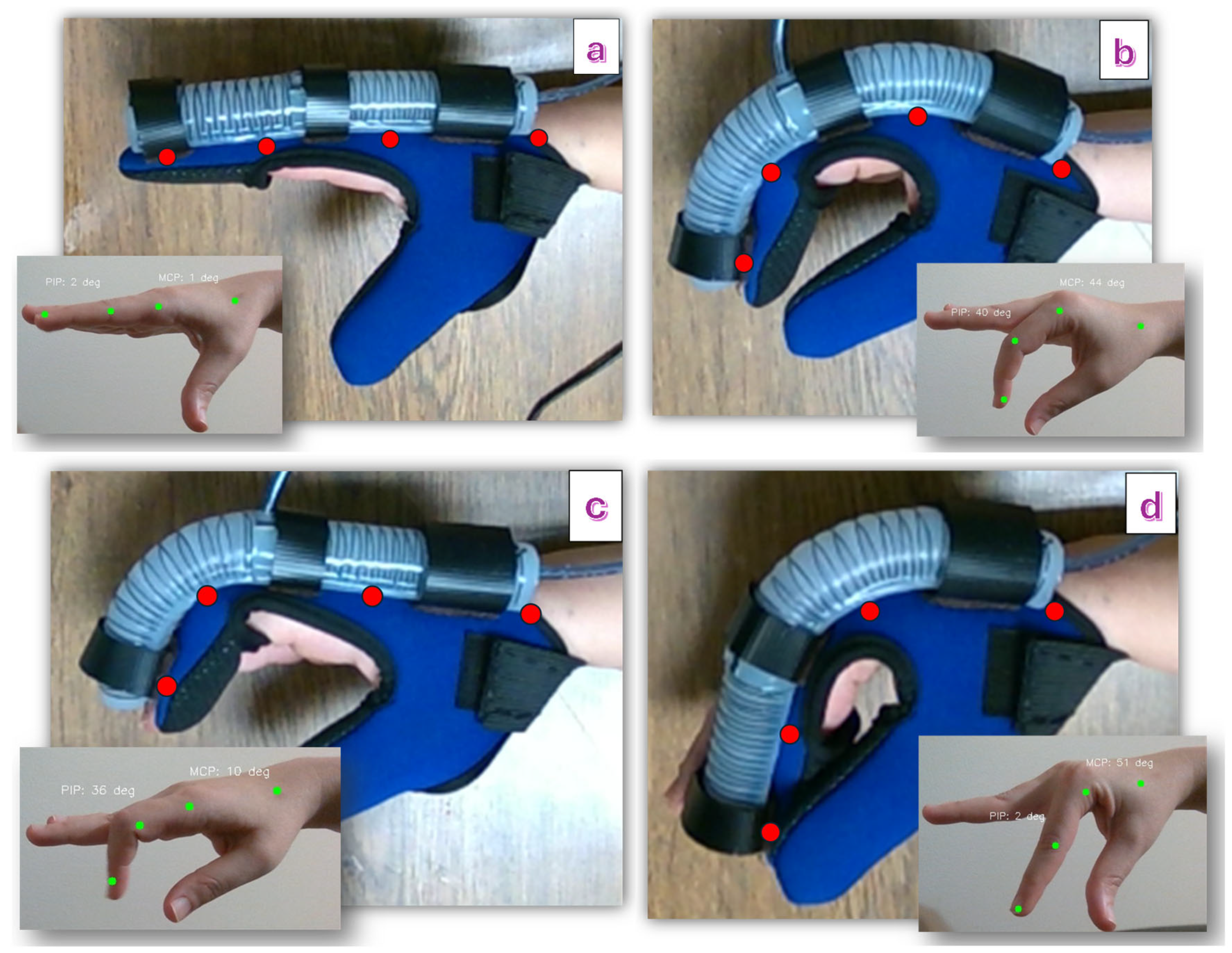
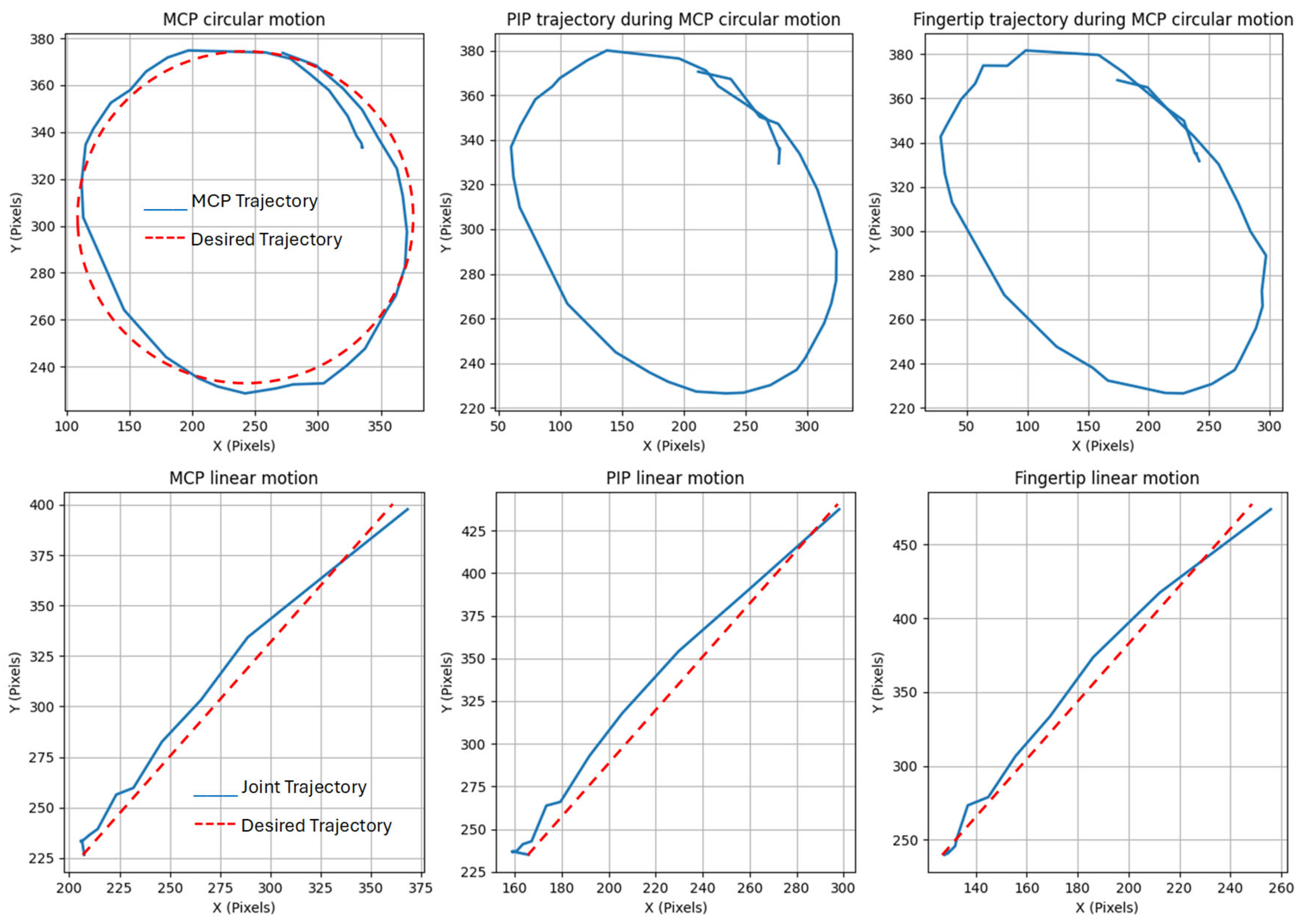
4.3. Bending Angle Calculations
4.4. System Integration and Workflow
5. Results
5.1. Design Verification
5.2. Training the Model for Joint Localization
- Non-Intrusive Monitoring: By using vision-based keypoint detection, the system avoids the need for intrusive or bulky sensors, preserving the glove’s natural design.
- Real-Time Performance: YOLOv8s Pose delivers fast inference speeds, making it ideal for applications where real-time feedback is critical, such as rehabilitation or gaming interfaces.
- High Accuracy: The model’s architecture ensures precise detection of keypoints, even in scenarios where the hand is fully covered by the glove.
- Scalability and Adaptability: YOLOv8s Pose can be retrained to detect different keypoints or accommodate various glove designs, making it highly versatile.
- Integration Capability: The model’s lightweight structure allows it to integrate seamlessly with existing hardware, such as embedded systems or edge devices, ensuring portability and ease of deployment.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rahman, N.; Diteesawat, R.S.; Hoh, S.; Morris, L.; Turton, A.; Cramp, M.; Rossiter, J. Soft Scissor: A Cartilage-Inspired, Pneumatic Artificial Muscle for Wearable Devices. IEEE Robot. Autom. Lett. 2025, 10, 2367–2374. [Google Scholar] [CrossRef]
- Ghobadi, N.; Sepehri, N.; Kinsner, W.; Szturm, T. Beyond Human Touch: Integrating Soft Robotics with Environmental Interaction for Advanced Applications. Actuators 2024, 13, 507. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y. Innovative Design of Embedded Pressure and Position Sensors for Soft Actuators. IEEE Robot. Autom. Lett. 2017, 3, 656–663. [Google Scholar] [CrossRef]
- Chen, F.; Wang, M.Y. Design Optimization of Soft Robots: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Yap, H.K.; Ng, H.Y.; Yeow, C.-H. High-Force Soft Printable Pneumatics for Soft Robotic Applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Soliman, M.; Saleh, M.A.; Mousa, M.A.; Elsamanty, M.; Radwan, A.G. Theoretical and Experimental Investigation Study of Data Driven Work Envelope Modelling for 3D Printed Soft Pneumatic Actuators. Sens. Actuators A Phys. 2021, 331, 112978. [Google Scholar] [CrossRef]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C.M. Design Optimisation of Soft Silicone Pneumatic Actuators Using Finite Element Analysis. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 44–49. [Google Scholar]
- Ma, Z.; Wang, Y.; Zhang, T.; Liu, J. Reconfigurable Exomuscle System Employing Parameter Tuning to Assist Hip Flexion or Ankle Plantarflexion. IEEE/ASME Trans. Mechatron. 2025. early access. [Google Scholar] [CrossRef]
- Loo, J.Y.; Ding, Z.Y.; Baskaran, V.M.; Nurzaman, S.G.; Tan, C.P. Robust Multimodal Indirect Sensing for Soft Robots Via Neural Network-Aided Filter-Based Estimation. Soft Robot. 2022, 9, 591–612. [Google Scholar] [CrossRef]
- Lai, J.; Song, A.; Shi, K.; Ji, Q.; Lu, Y.; Li, H. Design and Evaluation of a Bidirectional Soft Glove for Hand Rehabilitation-Assistance Tasks. IEEE Trans. Med. Robot. Bionics 2023, 5, 730–740. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Millar, M.; Edmonds, M.; Gao, F.; Zhu, Y.; Santos, V.J.; Rothrock, B.; Zhu, S.-C. A Glove-Based System for Studying Hand-Object Manipulation via Joint Pose and Force Sensing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6617–6624. [Google Scholar]
- Hassani, S.; Dackermann, U. A Systematic Review of Advanced Sensor Technologies for Non-Destructive Testing and Structural Health Monitoring. Sensors 2023, 23, 2204. [Google Scholar] [CrossRef] [PubMed]
- Hofer, M.; Sferrazza, C.; D’Andrea, R. A Vision-Based Sensing Approach for a Spherical Soft Robotic Arm. Front. Robot. AI 2021, 8, 630935. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Wang, S.; Du, S.; Xiao, E.; Yuan, W.; Feng, C. Real-Time Soft Body 3D Proprioception via Deep Vision-Based Sensing. IEEE Robot. Autom. Lett. 2020, 5, 3382–3389. [Google Scholar] [CrossRef]
- Zhang, Z.; Dequidt, J.; Duriez, C. Vision-Based Sensing of External Forces Acting on Soft Robots Using Finite Element Method. IEEE Robot. Autom. Lett. 2018, 3, 1529–1536. [Google Scholar] [CrossRef]
- Li, J.; Ma, J.; Hu, Y.; Zhang, L.; Liu, Z.; Sun, S. Vision-Based Reinforcement Learning Control of Soft Robot Manipulators. Robot. Intell. Autom. 2024, 44, 783–790. [Google Scholar] [CrossRef]
- Ogunmolu, O.P.; Gu, X.; Jiang, S.; Gans, N.R. A Real-Time, Soft Robotic Patient Positioning System for Maskless Head-and-Neck Cancer Radiotherapy: An Initial Investigation. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 1539–1545. [Google Scholar]
- Werner, P.; Hofer, M.; Sferrazza, C.; D’Andrea, R. Vision-Based Proprioceptive Sensing: Tip Position Estimation for a Soft Inflatable Bellow Actuator. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 8889–8896. [Google Scholar]
- Oguntosin, V.; Akindele, A.; Alashiri, O. Vision Algorithms for Sensing Soft Robots. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1378, p. 032102. [Google Scholar]
- Wu, T.; Dong, Y.; Liu, X.; Han, X.; Xiao, Y.; Wei, J.; Wan, F.; Song, C. Vision-Based Tactile Intelligence with Soft Robotic Metamaterial. Mater. Des. 2024, 238, 112629. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Van-Zwieten, K.J.; Schmidt, K.P.; Bex, G.J.; Lippens, P.L.; Duyvendak, W. An Analytical Expression for the DIP–PIP Flexion Interdependence in Human Fingers. Acta Bioeng. Biomech. 2015, 17, 129–135. [Google Scholar]
- Marechal, L.; Balland, P.; Lindenroth, L.; Petrou, F.; Kontovounisios, C.; Bello, F. Toward a Common Framework and Database of Materials for Soft Robotics. Soft Robot. 2021, 8, 284–297. [Google Scholar] [CrossRef]
- Pu, M.; Chong, C.Y.; Lim, M.K. Robustness Evaluation in Hand Pose Estimation Models Using Metamorphic Testing. In Proceedings of the 2023 IEEE/ACM 8th International Workshop on Metamorphic Testing (MET), Melbourne, Australia, 14 May 2023; pp. 31–38. [Google Scholar]
- Luo, J.; Zhu, L.; Li, L.; Hong, P. Robot Visual Servoing Grasping Based on Top-down Keypoint Detection Network. IEEE Trans. Instrum. Meas. 2023, 73, 5000511. [Google Scholar] [CrossRef]
- Pavlovych, A.; Stuerzlinger, W. The Tradeoff between Spatial Jitter and Latency in Pointing Tasks. In Proceedings of the Proceedings of the 1st ACM SIGCHI Symposium on Engineering Interactive Computing Systems, Pittsburgh, PA, USA, 15–17 July 2009; pp. 187–196. [Google Scholar]
- Tsai, C.; Lee, P.; Bui, T.; Xu, G.; Sheu, M. Moving Object Detection for Remote Sensing Video with Satellite Jitter. In Proceedings of the 2023 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 6–8 January 2023; pp. 1–2. [Google Scholar]
- Groß, J.; Timmermann, L.; Kujala, J.; Dirks, M.; Schmitz, F.; Salmelin, R.; Schnitzler, A. The Neural Basis of Intermittent Motor Control in Humans. Proc. Natl. Acad. Sci. USA 2002, 99, 2299–2302. [Google Scholar] [CrossRef] [PubMed]
- van Galen, G.P.; van Huygevoort, M. Error, Stress and the Role of Neuromotor Noise in Space Oriented Behaviour. Biol. Psychol. 2000, 51, 151–171. [Google Scholar] [CrossRef]
- Halliday, A.M.; Redfearn, J.W.T. An Analysis of the Frequencies of Finger Tremor in Healthy Subjects. J. Physiol. 1956, 134, 600. [Google Scholar] [CrossRef]
- Brigham, E.O.; Morrow, R.E. The Fast Fourier Transform. IEEE Spectr. 1967, 4, 63–70. [Google Scholar] [CrossRef]
- Meng, F.; Liu, C.; Li, Y.; Hao, H.; Li, Q.; Lyu, C.; Wang, Z.; Ge, G.; Yin, J.; Ji, X. Personalized and Safe Soft Glove for Rehabilitation Training. Electronics 2023, 12, 2531. [Google Scholar] [CrossRef]
- Chen, X.; Gong, L.; Wei, L.; Yeh, S.-C.; Da Xu, L.; Zheng, L.; Zou, Z. A Wearable Hand Rehabilitation System with Soft Gloves. IEEE Trans. Ind. Inform. 2020, 17, 943–952. [Google Scholar] [CrossRef]
- Wang, J.; Fei, Y.; Pang, W. Design, Modeling, and Testing of a Soft Pneumatic Glove with Segmented Pneunets Bending Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 990–1001. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, D.; Zhang, Y.; Liu, J.; Wen, L.; Xu, W.; Zhang, Y. A Three-Fingered Force Feedback Glove Using Fiber-Reinforced Soft Bending Actuators. IEEE Trans. Ind. Electron. 2019, 67, 7681–7690. [Google Scholar] [CrossRef]
- Duanmu, D.; Wang, X.; Li, X.; Wang, Z.; Hu, Y. Design of Guided Bending Bellows Actuators for Soft Hand Function Rehabilitation Gloves. Actuators 2022, 11, 346. [Google Scholar] [CrossRef]
- Heung, K.H.L.; Tong, R.K.Y.; Lau, A.T.H.; Li, Z. Robotic Glove with Soft-Elastic Composite Actuators for Assisting Activities of Daily Living. Soft Robot. 2019, 6, 289–304. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, Z.; Fei, Y. Design and Testing of a Soft Rehabilitation Glove Integrating Finger and Wrist Function. J. Mech. Robot. 2019, 11, 011015. [Google Scholar] [CrossRef]
- Li, X.; Hao, Y.; Zhang, J.; Wang, C.; Li, D.; Zhang, J. Design, Modeling and Experiments of a Variable Stiffness Soft Robotic Glove for Stroke Patients with Clenched Fist Deformity. IEEE Robot. Autom. Lett. 2023, 8, 4044–4051. [Google Scholar] [CrossRef]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.-H. A Fully Fabric-Based Bidirectional Soft Robotic Glove for Assistance and Rehabilitation of Hand Impaired Patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Kokubu, S.; Vinocour, P.E.T.; Yu, W. Development and Evaluation of Fiber Reinforced Modular Soft Actuators and an Individualized Soft Rehabilitation Glove. Robot. Auton. Syst. 2024, 171, 104571. [Google Scholar] [CrossRef]
- Ha, J.; Kim, D.; Jo, S. Use of Deep Learning for Position Estimation and Control of Soft Glove. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), Pyeong Chang, Republic of Korea, 17–20 October 2018; pp. 570–574. [Google Scholar]
- Cheng, N.; Phua, K.S.; Lai, H.S.; Tam, P.K.; Tang, K.Y.; Cheng, K.K.; Yeow, R.C.-H.; Ang, K.K.; Guan, C.; Lim, J.H. Brain-Computer Interface-Based Soft Robotic Glove Rehabilitation for Stroke. IEEE Trans. Biomed. Eng. 2020, 67, 3339–3351. [Google Scholar] [CrossRef]
- Rho, E.; Lee, H.; Lee, Y.; Lee, K.-D.; Mun, J.; Kim, M.; Kim, D.; Park, H.-S.; Jo, S. Multiple Hand Posture Rehabilitation System Using Vision-Based Intention Detection and Soft-Robotic Glove. IEEE Trans. Ind. Inform. 2024, 20, 6499–6509. [Google Scholar] [CrossRef]
- Kwon, H.; Hwang, C.; Jo, S. Vision Combined with Mi-Based Bci in Soft Robotic Glove Control. In Proceedings of the 2022 10th International Winter Conference on Brain-Computer Interface (BCI), Gangwon-do, Republic of Korea, 21–23 February 2022; pp. 1–5. [Google Scholar]
- Jadhav, S.; Kannanda, V.; Kang, B.; Tolley, M.T.; Schulze, J.P. Soft Robotic Glove for Kinesthetic Haptic Feedback in Virtual Reality Environments. Electron. Imaging 2017, 29, 19–24. [Google Scholar] [CrossRef]
- Shen, Z.; Yi, J.; Li, X.; Lo, M.H.P.; Chen, M.Z.Q.; Hu, Y.; Wang, Z. A Soft Stretchable Bending Sensor and Data Glove Applications. Robot. Biomim. 2016, 3, 22. [Google Scholar] [CrossRef]
- Park, M.; Park, T.; Park, S.; Yoon, S.J.; Koo, S.H.; Park, Y.-L. Stretchable Glove for Accurate and Robust Hand Pose Reconstruction Based on Comprehensive Motion Data. Nat. Commun. 2024, 15, 5821. [Google Scholar] [CrossRef]
- Glauser, O.; Wu, S.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. Interactive Hand Pose Estimation Using a Stretch-Sensing Soft Glove. ACM Trans. Graph. (ToG) 2019, 38, 1–15. [Google Scholar] [CrossRef]
- Syringas, P.; Economopoulos, T.; Kouris, I.; Kakkos, I.; Papagiannis, G.; Triantafyllou, A.; Tselikas, N.; Matsopoulos, G.K.; Fotiadis, D.I. Rehabotics: A Comprehensive Rehabilitation Platform for Post-Stroke Spasticity, Incorporating a Soft Glove, a Robotic Exoskeleton Hand and Augmented Reality Serious Games. Eng. Proc. 2023, 50, 2. [Google Scholar]
- Hume, M.C.; Gellman, H.; McKellop, H.; Brumfield, R.H., Jr. Functional Range of Motion of the Joints of the Hand. J. Hand Surg. Am. 1990, 15, 240–243. [Google Scholar] [CrossRef] [PubMed]
- Yap, H.K.; Lim, J.H.; Nasrallah, F.; Yeow, C.-H. Design and Preliminary Feasibility Study of a Soft Robotic Glove for Hand Function Assistance in Stroke Survivors. Front. Neurosci. 2017, 11, 547. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Main material | Dragon Skin 20 |
| Cover material | Dragon Skin 10 |
| Number of chambers | Two |
| Actuator dimensions (L × W × H) | 15 × 2 × 1.5 cm |
| Number of degments for each chamber (MCP, PIP) | MCP = 8, PIP = 6 |
| Segment dimensions (× × ) | 0.4 × 1.6 × 1.1 cm |
| Distance between segments | 0.2 cm |
| Fiber reinforcement | Double helix pattern |
| Movement | Finger with No Actuator | Finger Activated by Actuator | ||
|---|---|---|---|---|
| MCP Angle (Degree) | PIP Angle (Degree) | MCP Angle (Degree) | PIP Angle (Degree) | |
| Finger Extension | 1 | 2 | 2 | 2 |
| MCP and PIP Bend | 44 | 40 | 42 | 36 |
| PIP Bend | 10 | 36 | 3 | 56 |
| MCP Bend | 51 | 2 | 53 | 5 |
| Parameter | YOLOv8s Pose |
|---|---|
| Task | Keypoint Detection (Wrist, MCP, PIP, Tip) |
| Number of Samples | 5100 images |
| Image Size | 640 × 640 pixels |
| Batch Size | 16 |
| Epochs | 17 |
| Learning Rate | 0.0001 |
| Case | Actuator | Joints | Independent Joint Actuation | Bending Measurement | Non-Intrusive | Joint Localization | Ref. |
|---|---|---|---|---|---|---|---|
| Bidirectional soft glove | Rectangular, segmented | MCP, PIP, DIP |  | Flex sensor | | | [10] |
| Soft robotic glove | Hemi-circular, uniform | MCP, PIP, DIP | | Electromagnetic tracking system | |  | [11] |
| Personalized soft glove | Circular, segmented | MCP, PIP, DIP | | Bending sensor | | | [33] |
| Wearable hand rehabilitation system | Tendon-driven | Unified | | Flex sensors | | | [34] |
| Soft pneumatic glove | Rectangular, segmented | MCP, PIP, DIP | | Predefined angles 2 | N\A | N\A | [35] |
| Soft bending actuator | Hemi-circle, uniform | Unified | | Predefined angles | N\A | N\A | [36] |
| Guided bending bellows actuator | Circular, segmented | MCP, PIP, DIP | | Predefined angles | N\A | N\A | [37] |
| Soft-elastic composite actuator | Rectangular, uniform | MCP, PIP | | Predefined angles | N\A | N\A | [38] |
| Soft rehabilitation glove | Circular, uniform | Unified | | Predefined angles | N\A | N\A | [39] |
| Variable stiffness soft robotic glove | Hemi-circular, uniform | MCP, PIP, DIP | | Predefined angles | N\A | N\A | [40] |
| Bidirectional soft fabric robotic glove | Fully segmented | Unified | | Predefined angles | N\A | N\A | [41] |
| Modular soft actuator | Semi-circular, uniform | MCP, PIP, DIP | | Predefined angles | N\A | N\A | [42] |
| Pneumatic networks bending actuator | Rectangular, segmented | Unified | | Leap motion + pressure sensor | | | [43] |
| Intention Detection 3 | |||||||
| Case | Actuator | Bending measurement | Intention detector | Non-intrusive | Joint localization | Ref. | |
| BCI-based soft-fabric robotic glove | Fully segmented | Predefined angles | EEG | N\A | N\A | [44] | |
| Vision-based soft glove | Tendon-driven | Predefined angles | Vision | N\A | N\A | [45] | |
| Vision and MI-based soft robotic glove | Tendon-driven | Predefined angles | Vision, EEG | N\A | N\A | [46] | |
| Wearable soft robotic haptic feedback glove | Tendon-like string mechanism | Predefined angles | Leap motion, virtual reality | N\A | N\A | [47] | |
| Data Glove 4 | |||||||
| Case | Joint | Bending measurement | Non-intrusive | Joint localization | Ref. | ||
| Glove-based system for manipulation | MCP, PIP, DIP | IMU | | | [12] | ||
| Data glove | MCP, PIP | Soft stretchable bending sensor | | | [48] | ||
| Stretchable glove | MCP, PIP | Liquid-metal sensor | | | [49] | ||
| Stretch-sensing soft glove | MCP, PIP, DIP | Capacitive sensors | | | [50] | ||
| Robotic exoskeleton hand | Unified | Bending sensor | | | [51] | ||
| Current Study | |||||||
| Case | Actuator | Joints | Independent joint actuation | Bending measurement | Non-intrusive | Joint localization | |
| Soft pneumatic actuator | Hemi-circular, segmented | MCP, PIP, DIP | | Vision | | | |
| Case | Joints | Max. Tip Force (N) | Max. Pressure (kPa) | Ref. | ||
|---|---|---|---|---|---|---|
| Reference: Requirements | MCP, PIP, DIP | >7.3 [11] | – | MCP: 33–73 PIP: 36–86 [52] | – | – |
| Bidirectional soft glove | MCP, PIP, DIP | 16.02 | 200 | DIP: 57.9 PIP: 68.3 MCP: 68.1 | DIP: ±7.9 PIP: ±5.3 MCP: ±5.5 | [10] |
| Soft robotic glove | MCP, PIP, DIP | 8 | 345 | Finger: 250 | – | [11] |
| Soft pneumatic glove | MCP, PIP, DIP | 1.6 | 150 | MCP: 78.2 PIP: 76.0 | – | [35] |
| Guided bending bellows actuator | MCP, PIP, DIP | 25 | 240 | Finger: 250 | – | [37] |
| Soft rehabilitation glove | Unified | 19 | 200 | Finger: 216 | – | [39] |
| Variable stiffness soft robotic glove | MCP, PIP, DIP | 1.54 | 300 | Finger: 155 | – | [40] |
| Bidirectional soft fabric robotic glove | Unified | 14.3 | 70 | DIP: 46.9 PIP: 73.4 MCP: 61.7 | DIP: ±15.7 PIP: ±11.1 MCP: ±8.6 | [41] |
| Modular soft actuator | MCP, PIP, DIP | 13 | 200 | DIP: 75.7 PIP: 99.0 MCP: 86.9 | – | [42] |
| Fabric-reinforced soft pneumatic actuator | Unified | 9.12 | 120 | MCP: 73.9 PIP: 79.9 DIP: 46.0 | MCP: ±10.4 PIP: ±4.2 DIP: ±3.3 | [53] |
| Current Study | ||||||
| Soft pneumatic actuator | MCP, PIP, DIP | 9.3 | 105 | PIP: 95 MCP: 105 | Vision-based; pixel drift ±5 px → ~±2.9 2 | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghobadi, N.; Kinsner, W.; Szturm, T.; Sepehri, N. Design and Evaluation of a Soft Robotic Actuator with Non-Intrusive Vision-Based Bending Measurement. Sensors 2025, 25, 3858. https://doi.org/10.3390/s25133858
Ghobadi N, Kinsner W, Szturm T, Sepehri N. Design and Evaluation of a Soft Robotic Actuator with Non-Intrusive Vision-Based Bending Measurement. Sensors. 2025; 25(13):3858. https://doi.org/10.3390/s25133858
Chicago/Turabian StyleGhobadi, Narges, Witold Kinsner, Tony Szturm, and Nariman Sepehri. 2025. "Design and Evaluation of a Soft Robotic Actuator with Non-Intrusive Vision-Based Bending Measurement" Sensors 25, no. 13: 3858. https://doi.org/10.3390/s25133858
APA StyleGhobadi, N., Kinsner, W., Szturm, T., & Sepehri, N. (2025). Design and Evaluation of a Soft Robotic Actuator with Non-Intrusive Vision-Based Bending Measurement. Sensors, 25(13), 3858. https://doi.org/10.3390/s25133858