
Skin-Inspired Magnetoresistive Tactile Sensor for Force Characterization in Distributed Areas

 ,
,  , ,
, ,  , , and
, , and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Elastomer Simulation Model
2.1.1. Geometry
2.1.2. Mechanical and Magnetic Parameters
2.1.3. Meshing
2.2. Design, Fabrication, and Characterization of the Device
2.2.1. Printed Circuit Board
2.2.2. Magnetic Field Sensors
2.2.3. Wire Bonding
2.2.4. Epoxy Encasing
2.2.5. Elastomer Fabrication
2.2.6. Vibrating-Sample Magnetometer Measurements
2.2.7. Device Characterization
2.3. Data Acquisition and Model Training
2.3.1. Magneto-Elastic Response Testing
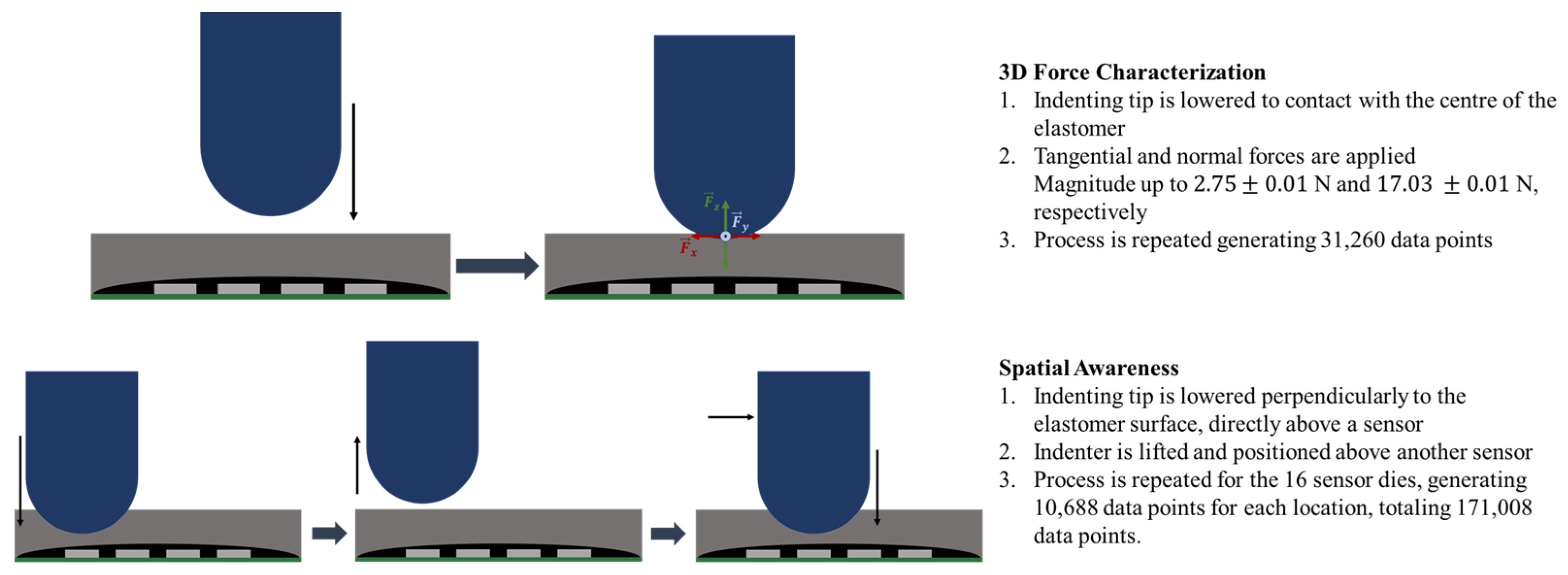
2.3.2. 3D Force Characterization
2.3.3. Spatial Awareness
3. Results
3.1. Simulations
3.2. Impact of the Volume of Epoxy on the Robustness of the Device
3.3. Response of the Device to Applied Force
3.3.1. Characterization
3.3.2. 3D Force Characterization
3.3.3. Spatial Awareness
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed]
- See, A.R.; Choco, J.A.G.; Chandramohan, K. Touch, Texture and Haptic Feedback: A Review on How We Feel the World around Us. Appl. Sci. 2022, 12, 4686. [Google Scholar] [CrossRef]
- Spence, C.; Gallace, A. Making Sense of Touch. In Touch in Museums; Routledge: London, UK, 2020; pp. 21–40. [Google Scholar] [CrossRef]
- Dargahi, J.; Najarian, S. Human tactile perception as a standard for artificial tactile sensing—A review. Int. J. Med. Robot. Comput. Assist. Surg. 2004, 1, 23–35. [Google Scholar] [CrossRef]
- Wang, C.; Liu, C.; Shang, F.; Niu, S.; Ke, L.; Zhang, N.; Ma, B.; Li, R.; Sun, X.; Zhang, S. Tactile sensing technology in bionic skin: A review. Biosens. Bioelectron. 2023, 220, 114882. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, G.; Jin, Z.; Chen, J. A Review on Magnetic Smart Skin as Human–Machine Interfaces. Adv. Electron. Mater. 2024, 10, 677. [Google Scholar] [CrossRef]
- Dong, T.; Wang, J.; Chen, Y.; Liu, L.; You, H.; Li, T. Research Progress on Flexible 3-D Force Sensors: A Review. IEEE Sens. J. 2024, 24, 15706–15726. [Google Scholar] [CrossRef]
- Seminara, L.; Gastaldo, P.; Watt, S.J.; Valyear, K.F.; Zuher, F.; Mastrogiovanni, F. Active Haptic Perception in Robots: A Review. Front. Neurorobot. 2019, 13, 53. [Google Scholar] [CrossRef]
- Luo, S.; Bimbo, J.; Dahiya, R.; Liu, H. Robotic tactile perception of object properties: A review. Mechatronics 2017, 48, 54–67. [Google Scholar] [CrossRef]
- Navarro-Guerrero, N.; Toprak, S.; Josifovski, J.; Jamone, L. Visuo-haptic object perception for robots: An overview. Auton. Robot. 2023, 47, 377–403. [Google Scholar] [CrossRef]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Huang, F.; Sun, X.; Xu, Q.; Cheng, W.; Shi, Y.; Pan, L. Recent Developments and Applications of Tactile Sensors with Biomimetic Microstructures. Biomimetics 2025, 10, 147. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Zhou, D.; Hong, W.; Wang, D.; Liu, T.; Wang, D.; Liu, L.; Yu, S.; Song, Y.; Bai, S.; et al. Biologically Emulated Flexible Sensors With High Sensitivity and Low Hysteresis: Toward Electronic Skin to a Sense of Touch. Small 2022, 18, 3044. [Google Scholar] [CrossRef] [PubMed]
- Sanderson, K. Electronic skin: From flexibility to a sense of touch. Nature 2021, 591, 685–687. [Google Scholar] [CrossRef]
- Roberts, P.; Zadan, M.; Majidi, C. Soft Tactile Sensing Skins for Robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar] [CrossRef]
- Li, Q.; Kroemer, O.; Su, Z.; Veiga, F.F.; Kaboli, M.; Ritter, H.J. A Review of Tactile Information: Perception and Action Through Touch. IEEE Trans. Robot. 2020, 36, 1619–1634. [Google Scholar] [CrossRef]
- Hu, Z.; Lin, L.; Lin, W.; Xu, Y.; Xia, X.; Peng, Z.; Sun, Z.; Wang, Z. Machine Learning for Tactile Perception: Advancements, Challenges, and Opportunities. Adv. Intell. Syst. 2023, 5, 2200371. [Google Scholar] [CrossRef]
- Gao, S.; Dai, Y.; Nathan, A. Tactile and Vision Perception for Intelligent Humanoids. Adv. Intell. Syst. 2021, 4, 74. [Google Scholar] [CrossRef]
- Kinoshita, G.I.; Aida, S.; Mori, M. A pattern classification by dynamic tactile sense information processing. Pattern Recognit. 1975, 7, 243–251. [Google Scholar] [CrossRef]
- Raibert, M.H.; Tanner, J.E. Design and Implementation of a VLSI Tactile Sensing Computer. Int. J. Robot. Res. 1982, 1, 3–18. [Google Scholar] [CrossRef]
- Chi, C.; Sun, X.; Xue, N.; Li, T.; Liu, C. Recent Progress in Technologies for Tactile Sensors. Sensors 2018, 18, 948. [Google Scholar] [CrossRef]
- Yu, H.; Guo, H.; Wang, J.; Zhao, T.; Zou, W.; Zhou, P.; Xu, Z.; Zhang, Y.; Zheng, J.; Zhong, Y.; et al. Skin-Inspired Capacitive Flexible Tactile Sensor with an Asymmetric Structure for Detecting Directional Shear Forces. Adv. Sci. 2023, 11, 5883. [Google Scholar] [CrossRef] [PubMed]
- Sarwar, M.S.; Ishizaki, R.; Morton, K.; Preston, C.; Nguyen, T.; Fan, X.; Dupont, B.; Hogarth, L.; Yoshiike, T.; Qiu, R.; et al. Touch, press and stroke: A soft capacitive sensor skin. Sci. Rep. 2023, 13, 17390. [Google Scholar] [CrossRef] [PubMed]
- Seminara, L.; Pinna, L.; Valle, M.; Basiricò, L.; Loi, A.; Cosseddu, P.; Bonfiglio, A.; Ascia, A.; Biso, M.; Ansaldo, A.; et al. Piezoelectric Polymer Transducer Arrays for Flexible Tactile Sensors. IEEE Sens. J. 2013, 13, 4022–4029. [Google Scholar] [CrossRef]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-Inspired Piezoelectric Tactile Sensor Array with Crosstalk-Free Row+Column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli. Adv. Sci. 2021, 8, 2817. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.; Lee, D.G.; Park, J.; Ko, H.; Lim, H. Piezoresistive Tactile Sensor Discriminating Multidirectional Forces. Sensors 2015, 15, 25463–25473. [Google Scholar] [CrossRef]
- Zhong, F.; Hu, W.; Zhu, P.; Wang, H.; Ma, C.; Lin, N.; Wang, Z. Piezoresistive design for electronic skin: From fundamental to emerging applications. Opto-Electron. Adv. 2022, 5, 210029. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef]
- Kuppuswamy, N.; Alspach, A.; Uttamchandani, A.; Creasey, S.; Ikeda, T.; Tedrake, R. Soft-Bubble Grippers for Robust and Perceptive Manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 9917–9924. [Google Scholar] [CrossRef]
- Lambeta, M.; Chou, P.W.; Tian, S.; Yang, B.; Maloon, B.; Most, V.R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; et al. DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 3838–3845. [Google Scholar] [CrossRef]
- Larson, C.; Peele, B.; Li, S.; Robinson, S.; Totaro, M.; Beccai, L.; Mazzolai, B.; Shepherd, R. Highly Stretchable Electroluminescent Skin for Optical Signaling and Tactile Sensing. Science 2016, 351, 1071–1074. [Google Scholar] [CrossRef]
- Polygerinos, P.; Zbyszewski, D.; Schaeffter, T.; Razavi, R.; Seneviratne, L.D.; Althoefer, K. MRI-Compatible Fiber-Optic Force Sensors for Catheterization Procedures. IEEE Sens. J. 2010, 10, 1598–1608. [Google Scholar] [CrossRef]
- Li, T.; Su, Y.; Zheng, H.; Chen, F.; Li, X.; Tan, Y.; Zhou, Z. An Artificial Intelligence-Motivated Skin-Like Optical Fiber Tactile Sensor. Adv. Intell. Syst. 2023, 5, 2200460. [Google Scholar] [CrossRef]
- Kim, K.; Hong, J.H.; Bae, K.; Lee, K.; Lee, D.J.; Park, J.; Zhang, H.; Sang, M.; Ju, J.E.; Cho, Y.U.; et al. Extremely durable electrical impedance tomography–based soft and ultrathin wearable e-skin for three-dimensional tactile interfaces. Sci. Adv. 2024, 10, adr1099. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Yang, X.; Wang, P.; Geng, J.; Ma, G.; Wang, X. A Large-Area Flexible Tactile Sensor for Multi-Touch and Force Detection Using Electrical Impedance Tomography. IEEE Sens. J. 2022, 22, 7119–7129. [Google Scholar] [CrossRef]
- Jamone, L.; Natale, L.; Metta, G.; Sandini, G. Highly Sensitive Soft Tactile Sensors for an Anthropomorphic Robotic Hand. IEEE Sens. J. 2015, 15, 4226–4233. [Google Scholar] [CrossRef]
- Tomo, T.P.; Somlor, S.; Schmitz, A.; Hashimoto, S.; Sugano, S.; Jamone, L. Development of a hall-effect based skin sensor. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Le Signor, T.; Dupre, N.; Close, G.F. A Gradiometric Magnetic Force Sensor Immune to Stray Magnetic Fields for Robotic Hands and Grippers. IEEE Robot. Autom. Lett. 2022, 7, 3070–3076. [Google Scholar] [CrossRef]
- Man, J.; Chen, G.; Chen, J. Recent Progress of Biomimetic Tactile Sensing Technology Based on Magnetic Sensors. Biosensors 2022, 12, 1054. [Google Scholar] [CrossRef]
- Paulino, T.; Ribeiro, P.; Neto, M.; Cardoso, S.; Schmitz, A.; Santos-Victor, J.; Bernardino, A.; Jamone, L. Low-Cost 3-Axis Soft Tactile Sensors for the Human-Friendly Robot Vizzy. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 966–971. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Ledermann, C.; Wirges, S.; Oertel, D.; Mende, M.; Woern, H. Tactile sensor on a magnetic basis using novel 3D Hall sensor—First prototypes and results. In Proceedings of the 2013 IEEE 17th International Conference on Intelligent Engineering Systems (INES), San Jose, CA, USA, 19–21 June 2013; pp. 55–60. [Google Scholar]
- Julliere, M. Tunneling between ferromagnetic films. Phys. Lett. A 1975, 54, 225–226. [Google Scholar] [CrossRef]
- Xela Robotics. Xela Robotics—Tactile Sensing for Robotics and AI. Available online: https://www.xelarobotics.com (accessed on 10 June 2025).
- Bhirangi, R.; Hellebrekers, T.; Majidi, C.; Gupta, A. ReSkin: Versatile, replaceable, lasting tactile skins. In Proceedings of the CoRL, London, UK, 8 November 2021. [Google Scholar]
- Tomo, T.P.; Schmitz, A.; Wong, W.K.; Kristanto, H.; Somlor, S.; Hwang, J.; Jamone, L.; Sugano, S. Covering a Robot Fingertip With uSkin: A Soft Electronic Skin With Distributed 3-Axis Force Sensitive Elements for Robot Hands. IEEE Robot. Autom. Lett. 2018, 3, 124–131. [Google Scholar] [CrossRef]
- Tomo, T.P.; Regoli, M.; Schmitz, A.; Natale, L.; Kristanto, H.; Somlor, S.; Jamone, L.; Metta, G.; Sugano, S. A new silicone structure for uSkin—A soft, distributed, digital 3-axis skin sensor and its integration on the humanoid robot iCub. IEEE Robot. Autom. Lett. 2018, 3, 2584–2591. [Google Scholar] [CrossRef]
- XELA Robotics. uSPa44 Specification Sheet. Available online: https://www.xelarobotics.com (accessed on 23 October 2024).
- Hellebrekers, T.; Kroemer, O.; Majidi, C. Soft Magnetic Skin for Continuous Deformation Sensing. Adv. Intell. Syst. 2019, 1, 1900025. [Google Scholar] [CrossRef]
- Fang, B.; Xia, Z.; Sun, F.; Yang, Y.; Liu, H.; Fang, C. Soft Magnetic Fingertip With Particle-Jamming Structure for Tactile Perception and Grasping. IEEE Trans. Ind. Electron. 2023, 70, 6027–6035. [Google Scholar] [CrossRef]
- Xia, Z.; Fang, B.; Sun, F.; Liu, H.; Xu, W.; Fu, L.; Yang, Y. Contact Shape and Pose Recognition: Utilizing a Multipole Magnetic Tactile Sensor With a Metalearning Model. IEEE Robot. Autom. Mag. 2022, 29, 127–137. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, H.; Tang, D.; Zhang, C.; Fu, J.; Zhao, P. Magnetic flexible tactile sensor via direct ink writing. Sens. Actuators A Phys. 2021, 327, 112753. [Google Scholar] [CrossRef]
- Melexis. Triaxis® Magnetic Position Sensor ICs. Available online: https://www.melexis.com/en/products/magnetic-position-sensor-ics (accessed on 10 June 2025).
- Hu, H.; Zhang, C.; Lai, X.; Dai, H.; Pan, C.; Sun, H.; Tang, D.; Hu, Z.; Fu, J.; Li, T.; et al. Large-area magnetic skin for multi-point and multi-scale tactile sensing with super-resolution. Npj Flex. Electron. 2024, 8, 42. [Google Scholar] [CrossRef]
- Chen, Y.; Weng, L.; Liu, Y.; Liu, K.; Li, Z.; Hu, B.; Huang, W. Development and characterization of a highly sensitive magnetic electronic skin for intelligent manipulators. Measurement 2024, 224, 113939. [Google Scholar] [CrossRef]
- Ecoflex™ Series Super-Soft, Addition Cure Silicone Rubbers—Technical Bulletin. Available online: https://www.smooth-on.com/tb/files/ECOFLEX_SERIES_TB.pdf (accessed on 10 June 2025).
- Freitas, P.P.; Ferreira, R.; Cardoso, S. Spintronic Sensors. Proc. IEEE 2016, 104, 1894–1918. [Google Scholar] [CrossRef]
- Parkin, S.S.; Kaiser, C.; Panchula, A.; Rice, P.M.; Hughes, B.; Samant, M.; Yang, S.H. Giant tunnelling magnetoresistance at room temperature with MgO (100) tunnel barriers. Nat. Mater. 2004, 3, 862–867. [Google Scholar] [CrossRef] [PubMed]
- Valadeiro, J.P.; Amaral, J.; Leitao, D.C.; Ferreira, R.; Freitas Cardoso, S.; Freitas, P.J.P. Strategies for pTesla Field Detection Using MR Sensors with a Soft Pinned Sensing Layer. IEEE Trans. Magn. 2015, 51, 4400204. [Google Scholar] [CrossRef]
- Paz, E.; Serrano-Guisan, S.; Ferreira, R.; Freitas, P. Room temperature direct detection of low frequency magnetic fields in the 100 pT/Hz0.5 range using large arrays of magnetic tunnel junctions. J. Appl. Phys. 2014, 115, 17E501. [Google Scholar] [CrossRef]
- Negulescu, B.; Lacour, D.; Montaigne, F.; Gerken, A.; Paul, J.; Spetter, V.; Marien, J.; Duret, C.; Hehn, M. Wide range and tunable linear magnetic tunnel junction sensor using two exchange pinned electrodes. Appl. Phys. Lett. 2009, 95, 112502. [Google Scholar] [CrossRef]
- Bi, R.; Chen, R.; Wu, S.; Ma, H.; Zhang, H.; Liu, X.; He, J.; Hu, J. A High-Sensitivity, Low-Noise, and Low-Hysteresis Tunneling Magnetoresistance Sensor Based on Structural Optimization of Magnetic Tunnel Junctions. Sensors 2025, 25, 1730. [Google Scholar] [CrossRef] [PubMed]
- Rasly, M.; Nakatani, T.; Li, J.; Sepehri-Amin, H.; Sukegawa, H.; Sakuraba, Y. Magnetic, magnetoresistive and low-frequency noise properties of tunnel magnetoresistance sensor devices with amorphous CoFeBTa soft magnetic layers. J. Phys. D Appl. Phys. 2020, 54, 095002. [Google Scholar] [CrossRef]
- Park, Y.L.; Majidi, C.; Kramer, R.; Bérard, P.; Wood, R.J. Hyperelastic pressure sensing with a liquid-embedded elastomer. J. Micromech. Microeng. 2010, 20, 125029. [Google Scholar] [CrossRef]
- Ariati, R.; Sales, F.; Souza, A.; Lima, R.A.; Ribeiro, J. Polydimethylsiloxane Composites Characterization and Its Applications: A Review. Polymers 2021, 13, 4258. [Google Scholar] [CrossRef] [PubMed]
- Magnequench. Magnequench: Bonded Neo Powder (MQFP-B+ 5 µm NdFeB Ferromagnetic Particles). Available online: https://mqitechnology.com/products/bonded-neo-powder/ (accessed on 10 June 2025).
- Material Safety Data Sheet MQFP-B+(D50=5 microns). neo Magnequench. Available online: https://mqitechnology.com/wp-content/uploads/2018/06/msds-mqfp-bd505-microns-20441-089-r00-ce.pdf (accessed on 10 June 2025).
- Alfadhel, A.; Kosel, J. Magnetic Nanocomposite Cilia Tactile Sensor. Adv. Mater. 2015, 27, 7888–7892. [Google Scholar] [CrossRef]
- Lopes, N.M.d. Towards a Distributed Magnetic Tactile Sensor Network for Flexible Skin. Master’s Thesis, Instituto Superior Técnico, Lisboa, Portugal, 2021. [Google Scholar]
- Alfadhel, A.; Khan, M.A.; de Freitas, S.C.; Kosel, J. Magnetic Tactile Sensor for Braille Reading. IEEE Sens. J. 2016, 16, 8700–8705. [Google Scholar] [CrossRef]
- Böse, H.; Gerlach, T.; Ehrlich, J. Magnetorheological elastomers—An underestimated class of soft actuator materials. J. Intell. Mater. Syst. Struct. 2021, 32, 1550–1564. [Google Scholar] [CrossRef]
- Liu, T.; Xu, Y. Magnetorheological Elastomers: Materials and Applications. In Smart and Functional Soft Materials; Dong, X., Ed.; IntechOpen: Rijeka, Croatia, 2019; Chapter 4. [Google Scholar] [CrossRef]
- Ribeiro, P.; Khan, M.A.; Alfadhel, A.; Kosel, J.; Franco, F.; Cardoso, S.; Bernardino, A.; Santos-Victor, J.; Jamone, L. A Miniaturized Force Sensor Based on Hair-Like Flexible Magnetized Cylinders Deposited Over a Giant Magnetoresistive Sensor. IEEE Trans. Magn. 2017, 53, 2714625. [Google Scholar] [CrossRef]
- Näf, F.; Caetano, D.; Cardoso, S.; Tavares, G. A ZPM-based Resistive Sensor Array Readout System with a Novel Compensation Method. In Proceedings of the 2023 IEEE SENSORS, Vienna, Austria, 29 October–1 November 2023; pp. 1–4. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mechanical Max [mm] | Mechanical Min [mm] | Magnetic Max [mm] | Magnetic Min [mm] |
|---|---|---|---|---|
| Global | 0.3 | 6 × | 2 | 4 × |
| Indenter Surface | 0.05 | 1.3 × | N/A | N/A |
| Elastomer Surface | 0.02 | 5.6 × | N/A | N/A |
| Air–Elastomer Interface | N/A | N/A | 0.05 | 4 × |
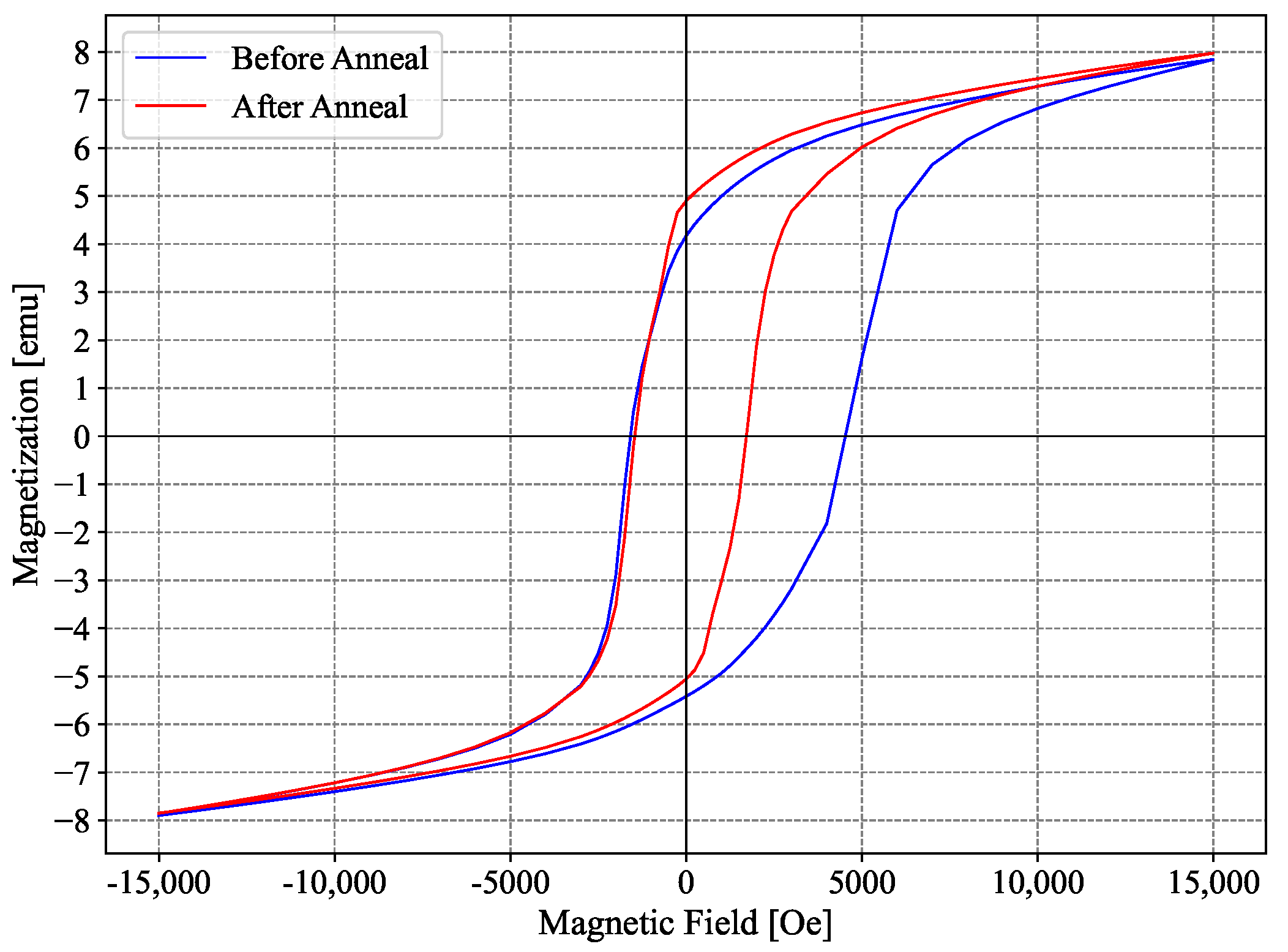
| Parameter | Pre-Annealing | Post-Annealing |
|---|---|---|
| Coercive Field— [Oe] | 3055.874 | 1588.129 |
| Saturation Magnetization— [emu] | 7.870 | 7.914 |
| Saturation Flux Density— [T] | 0.3850 | 0.3871 |
| Remanent Magnetization— [emu] | 4.794 | 4.976 |
| Remanent Flux Density— [T] | 0.2345 | 0.2434 |
| Absolute [mm] | Relative [%] | |||||||
|---|---|---|---|---|---|---|---|---|
| A | B | C | D | A | B | C | D | |
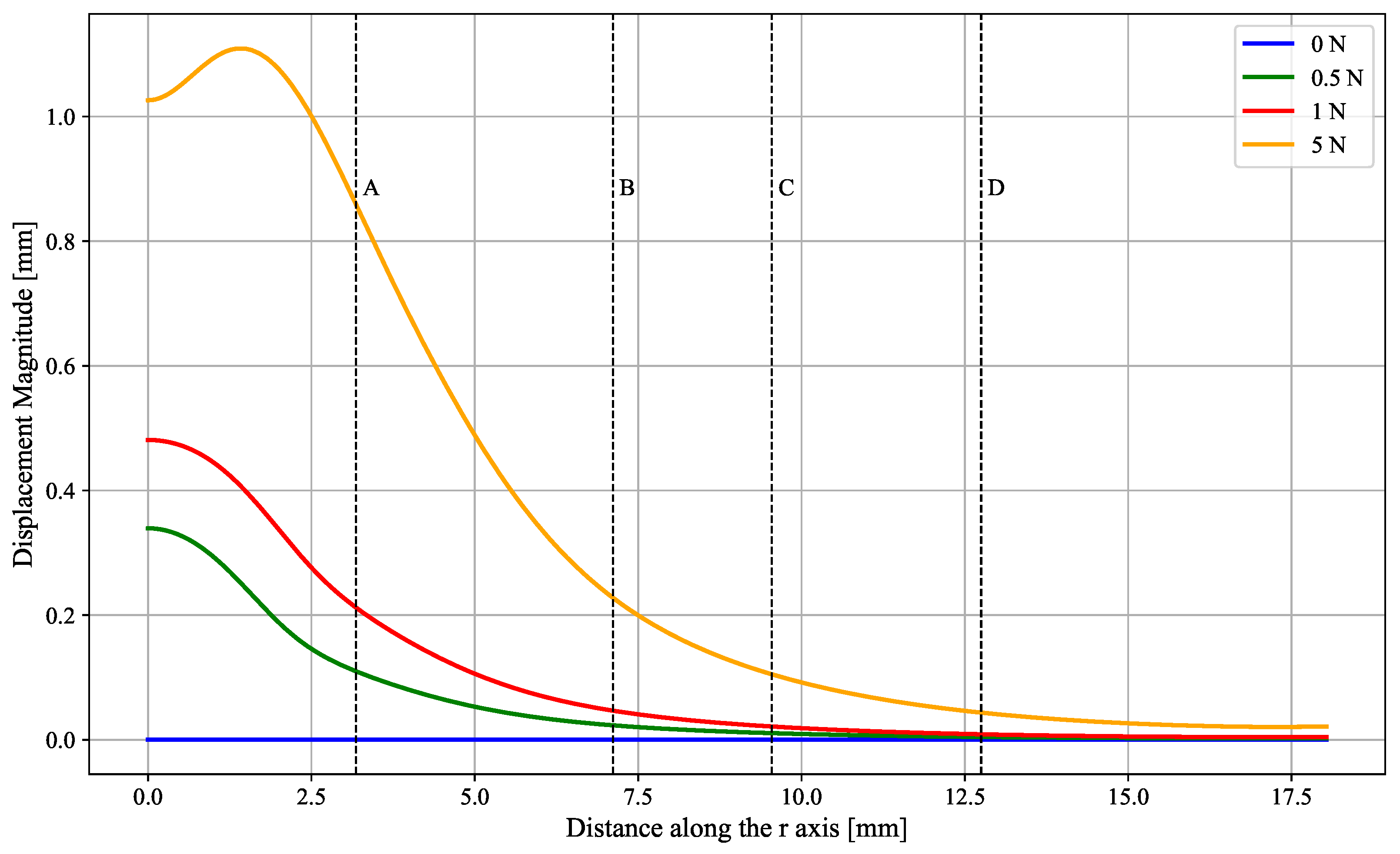
| 0 N | 0 | 0 | 0 | 0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 0.5 N | 0.1100 | 0.0230 | 0.0106 | 0.0043 | 3.7 | 0.8 | 0.4 | 0.1 |
| 1 N | 0.2126 | 0.0463 | 0.0213 | 0.0087 | 7.1 | 1.5 | 0.7 | 0.3 |
| 5 N | 0.8605 | 0.2265 | 0.1057 | 0.0437 | 28.7 | 7.6 | 3.5 | 1.5 |
| Absolute [Oe] | Relative [%] | |||||||
|---|---|---|---|---|---|---|---|---|
| A | B | C | D | A | B | C | D | |
| 0 N | −7.9891 | 22.8974 | 39.4987 | 90.3519 | N/A | N/A | N/A | N/A |
| 0.5 N | 5.8241 | 17.4475 | 35.4187 | 85.8504 | 172.9 | 23.8 | 10.3 | 5.0 |
| 1 N | 17.8722 | 12.9115 | 32.0997 | 81.9019 | 323.7 | 43.6 | 18.7 | 9.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mêda, F.; Näf, F.; Fernandes, T.P.; Bernardino, A.; Jamone, L.; Tavares, G.; Cardoso, S. Skin-Inspired Magnetoresistive Tactile Sensor for Force Characterization in Distributed Areas. Sensors 2025, 25, 3724. https://doi.org/10.3390/s25123724
Mêda F, Näf F, Fernandes TP, Bernardino A, Jamone L, Tavares G, Cardoso S. Skin-Inspired Magnetoresistive Tactile Sensor for Force Characterization in Distributed Areas. Sensors. 2025; 25(12):3724. https://doi.org/10.3390/s25123724
Chicago/Turabian StyleMêda, Francisco, Fabian Näf, Tiago P. Fernandes, Alexandre Bernardino, Lorenzo Jamone, Gonçalo Tavares, and Susana Cardoso. 2025. "Skin-Inspired Magnetoresistive Tactile Sensor for Force Characterization in Distributed Areas" Sensors 25, no. 12: 3724. https://doi.org/10.3390/s25123724
APA StyleMêda, F., Näf, F., Fernandes, T. P., Bernardino, A., Jamone, L., Tavares, G., & Cardoso, S. (2025). Skin-Inspired Magnetoresistive Tactile Sensor for Force Characterization in Distributed Areas. Sensors, 25(12), 3724. https://doi.org/10.3390/s25123724