
Energy-Efficient Deployment Simulator of UAV-Mounted Base Stations Under Dynamic Weather Conditions



Abstract
1. Introduction
- First, we developed an optimization problem that aimed to maximize the average energy efficiency of the entire multi-UAV-MBS network. Unlike prior studies that focused on the coverage or number of UAV-MBSs, our approach incorporated QoS constraints and weather attenuation to obtain a more practical UAV-MBS deployment strategy.
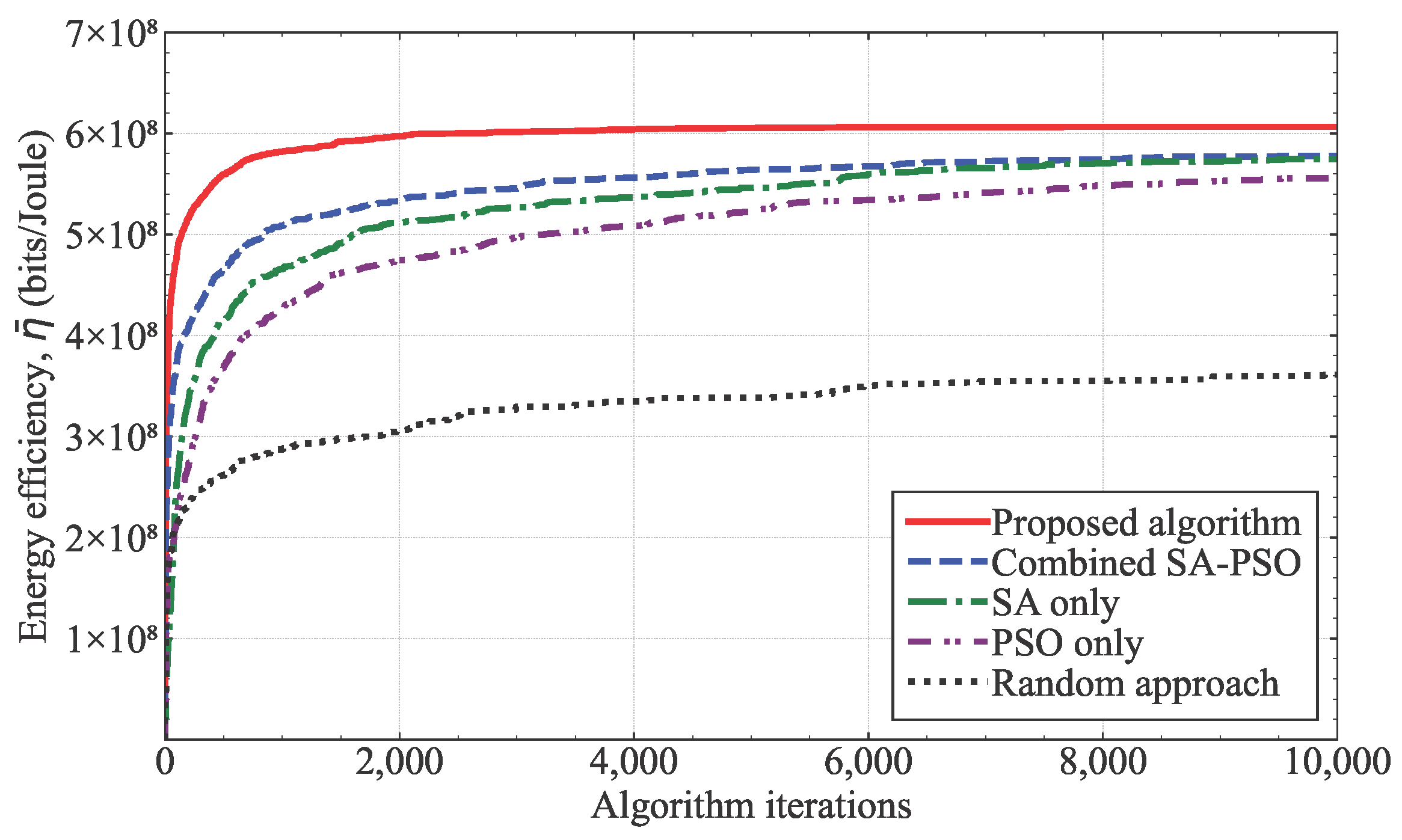
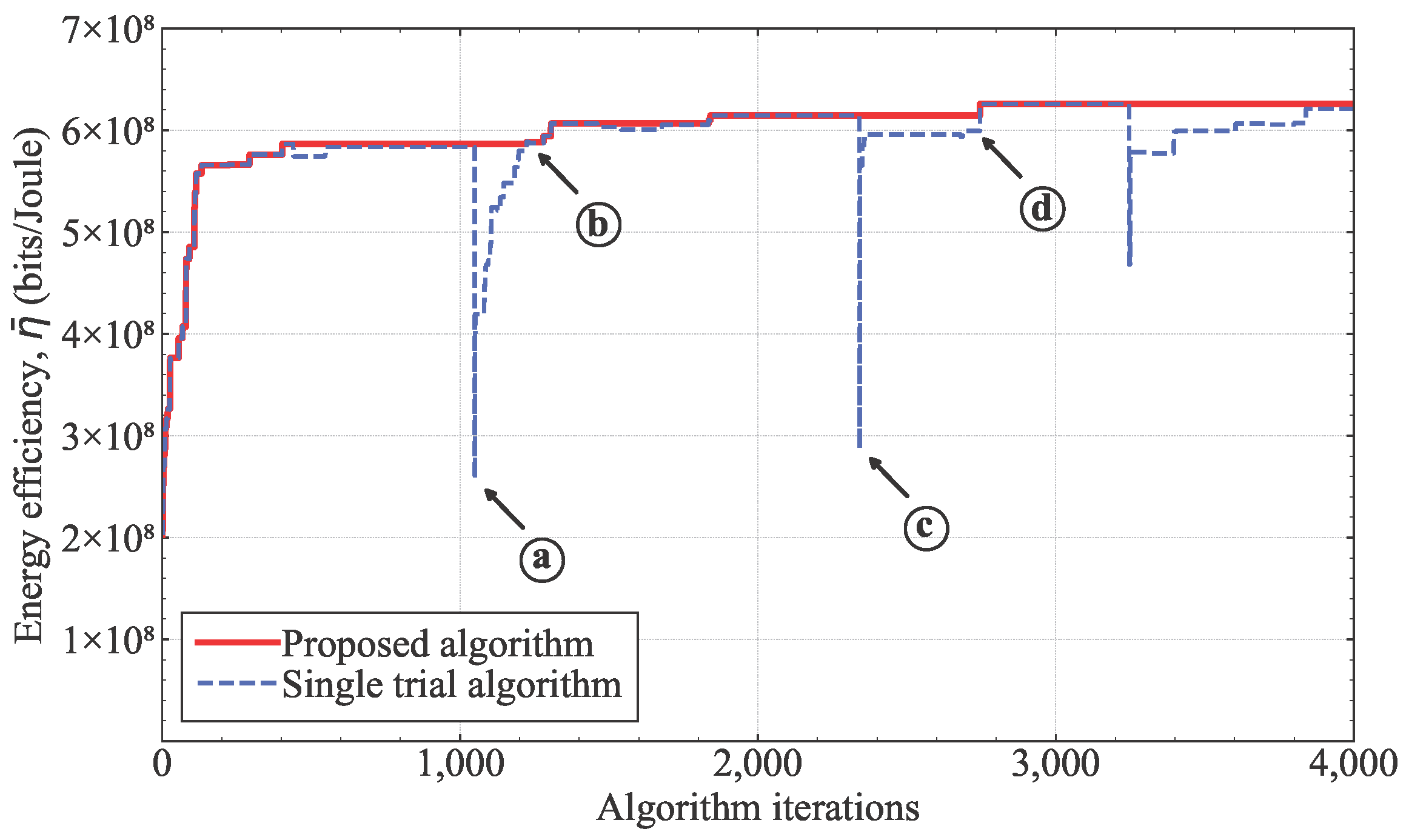
- Second, in order to efficiently solve the problem of determining the 3D coordinates and transmission powers of UAV-MBSs, we introduced a hybrid improved simulated annealing–particle swarm optimization (hybrid ISA–PSO) algorithm and compared its performance against existing methods. The simulation results show that the proposed algorithm achieved faster convergence and higher stability, and in particular, it demonstrated the efficiency of the novel initialization strategy.
- Third, we developed a geolocation-aware simulator based on the proposed algorithm. The simulator integrates terrain data, real-time weather information, and environmental parameters into the optimization process to derive the approximate solution and provide real-time visualization. Network operators can modify various parameters, compare results, and perform detailed analyses.
2. System Model and Problem Formulation
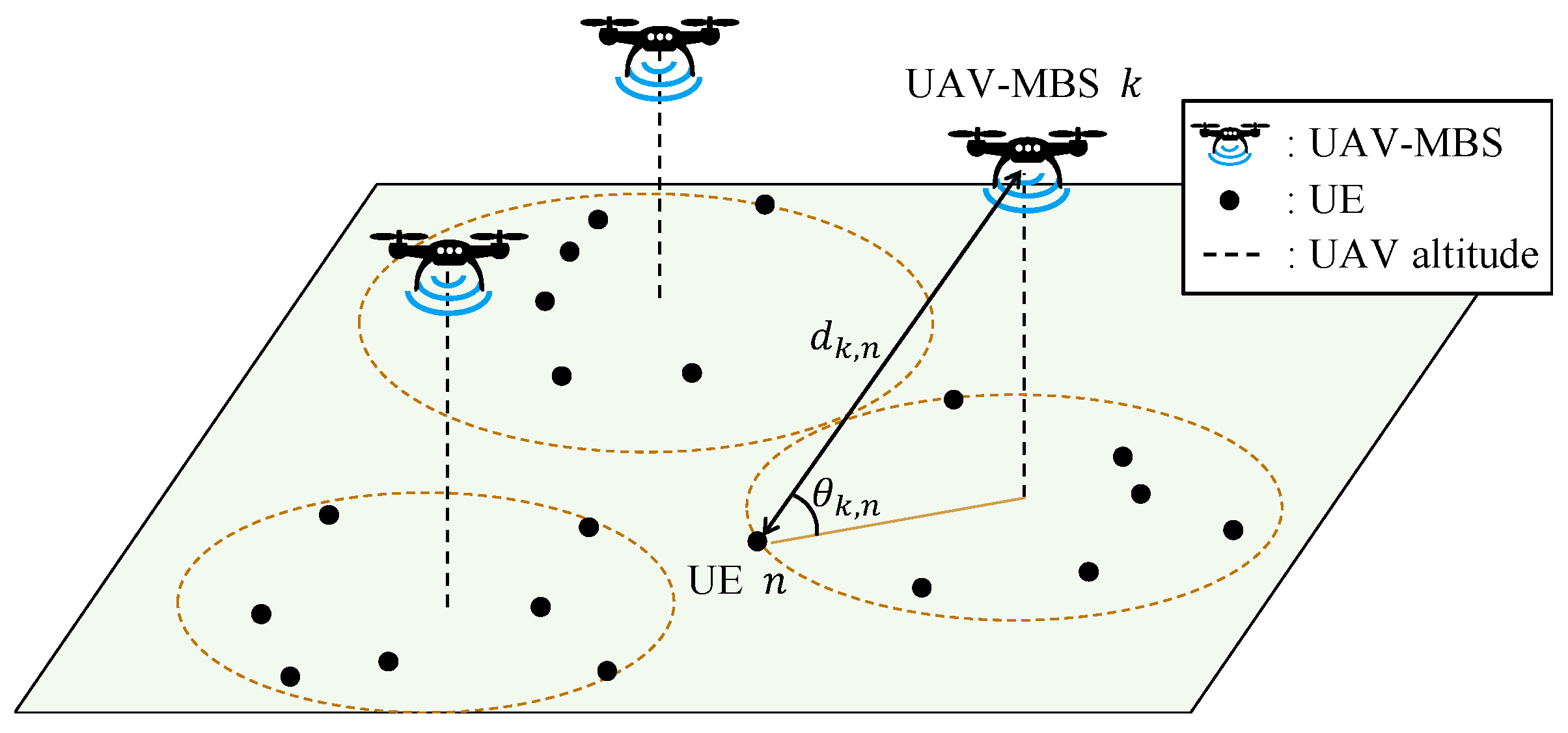
2.1. System Description
2.2. Channel Model
2.3. Problem Formulation
3. Proposed Algorithm
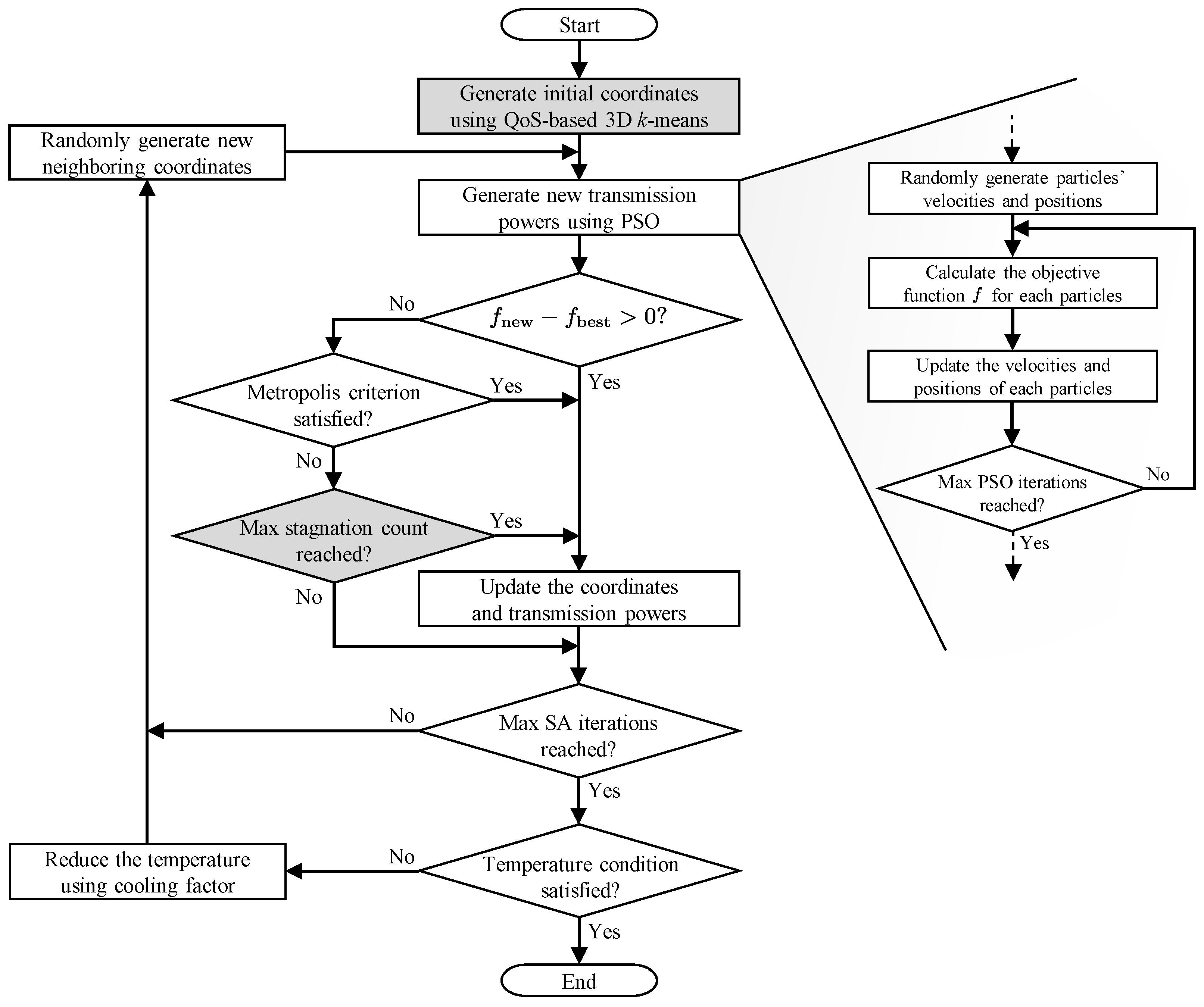
3.1. Overview of the Proposed Hybrid ISA-PSO
3.2. QoS-Based 3D k-Means Initialization
- Step 1: Randomly select K initial cluster centroids, .
- Step 2: Each coordinate is assigned to the closest cluster centroid based on the Euclidean distance, i.e., cluster k set .
- Step 3: Compute the new centroid for each cluster by averaging the coordinates of the UE devices assigned to it, i.e., .
- Step 4: Repeat until the the total change in the centroid positions falls below a threshold (in this study, we set this threshold to ), i.e., .
| Algorithm 1 Initial Solution of Hybrid ISA-PSO Algorithm |
Input: UE positions and QoS requirements Output: UAV-MBS initial coordinates , transmission powers , objective function value Set parameters: Initial and final inertia coefficients ; cognitive and special coefficients ; number of particles M; maximum PSO iteration
|
3.3. Hybrid ISA-PSO Algorithm for Iterative Searching
3.3.1. Modified Objective Function
3.3.2. PSO Phase
3.3.3. SA Phase
3.4. Complexity Analysis
| Algorithm 2 Main Iteration of Hybrid ISA-PSO Algorithm |
Input: UAV-MBS initial coordinates , transmission powers , objective function value Output: UAV-MBS final coordinates and transmission powers Set parameters: Cooling rate ; adjustment factor ; termination threshold factor ; basic and maximum step sizes ; maximum stagnation count ; maximum SA-iteration ; initial and final inertia coefficients ; cognitive and special coefficients ; number of particles M; maximum PSO-iteration
|
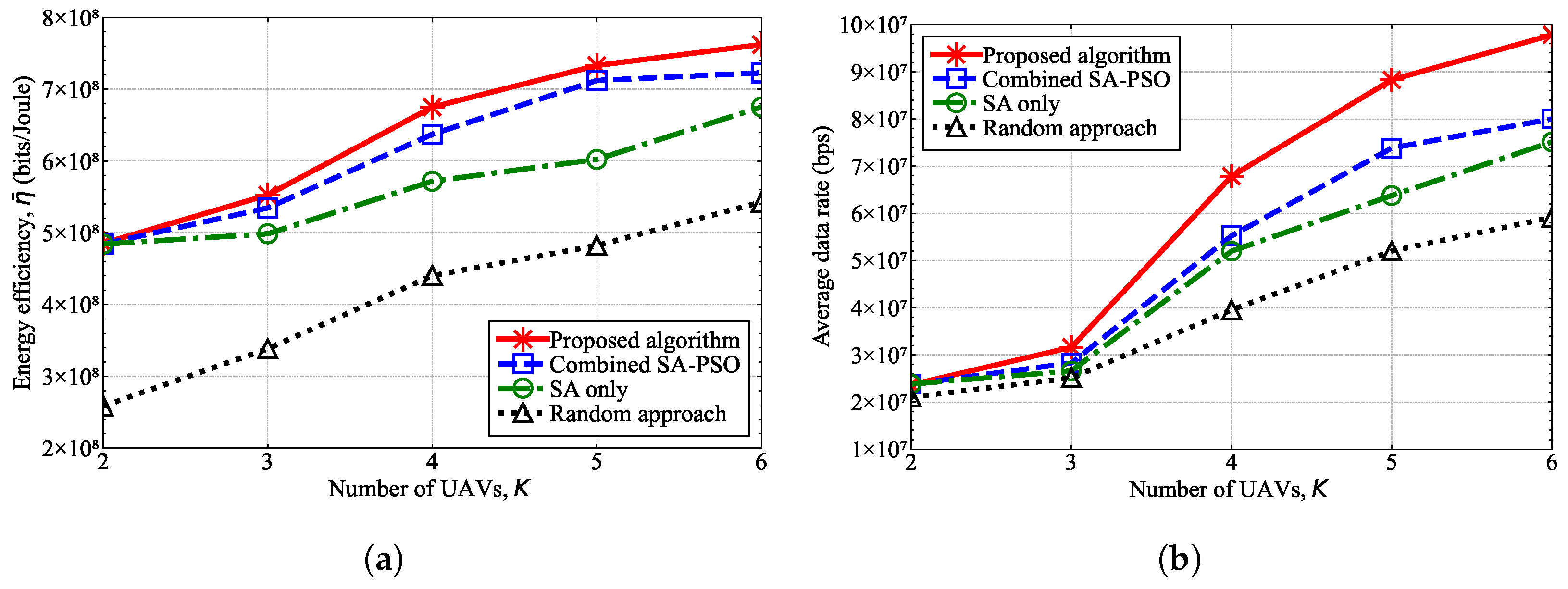
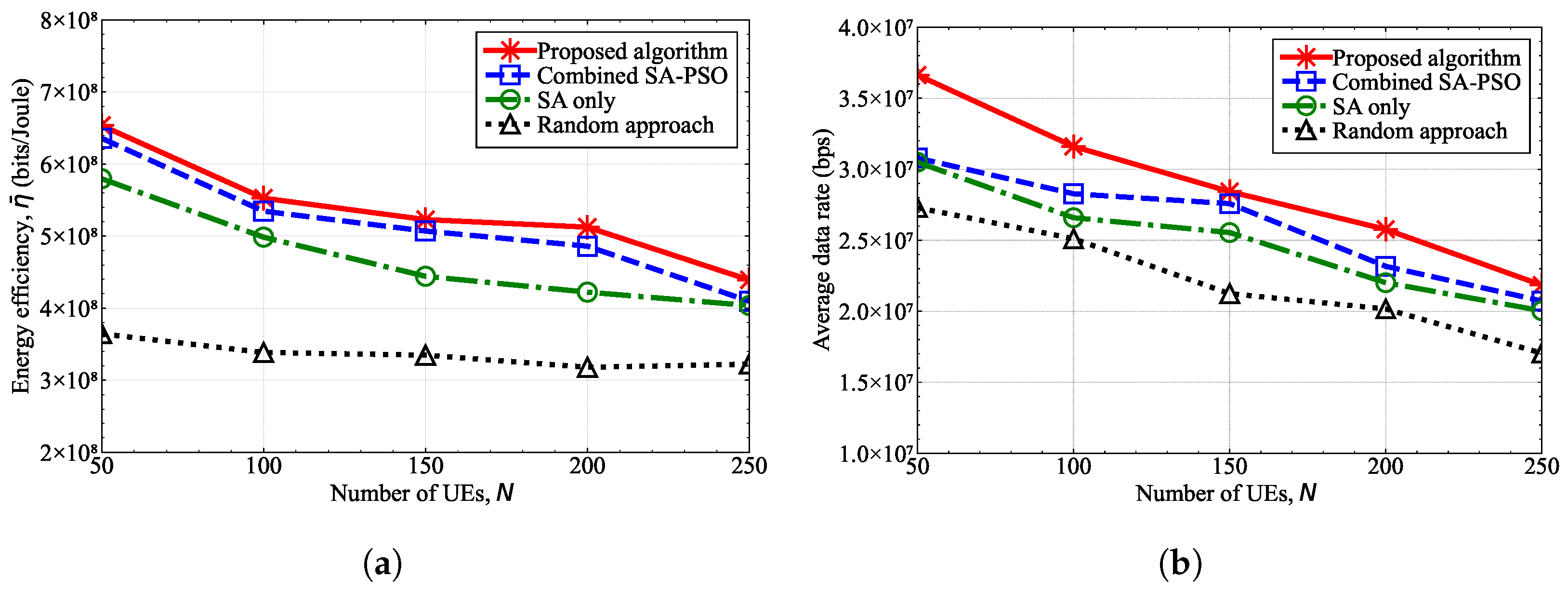
4. Simulation Results
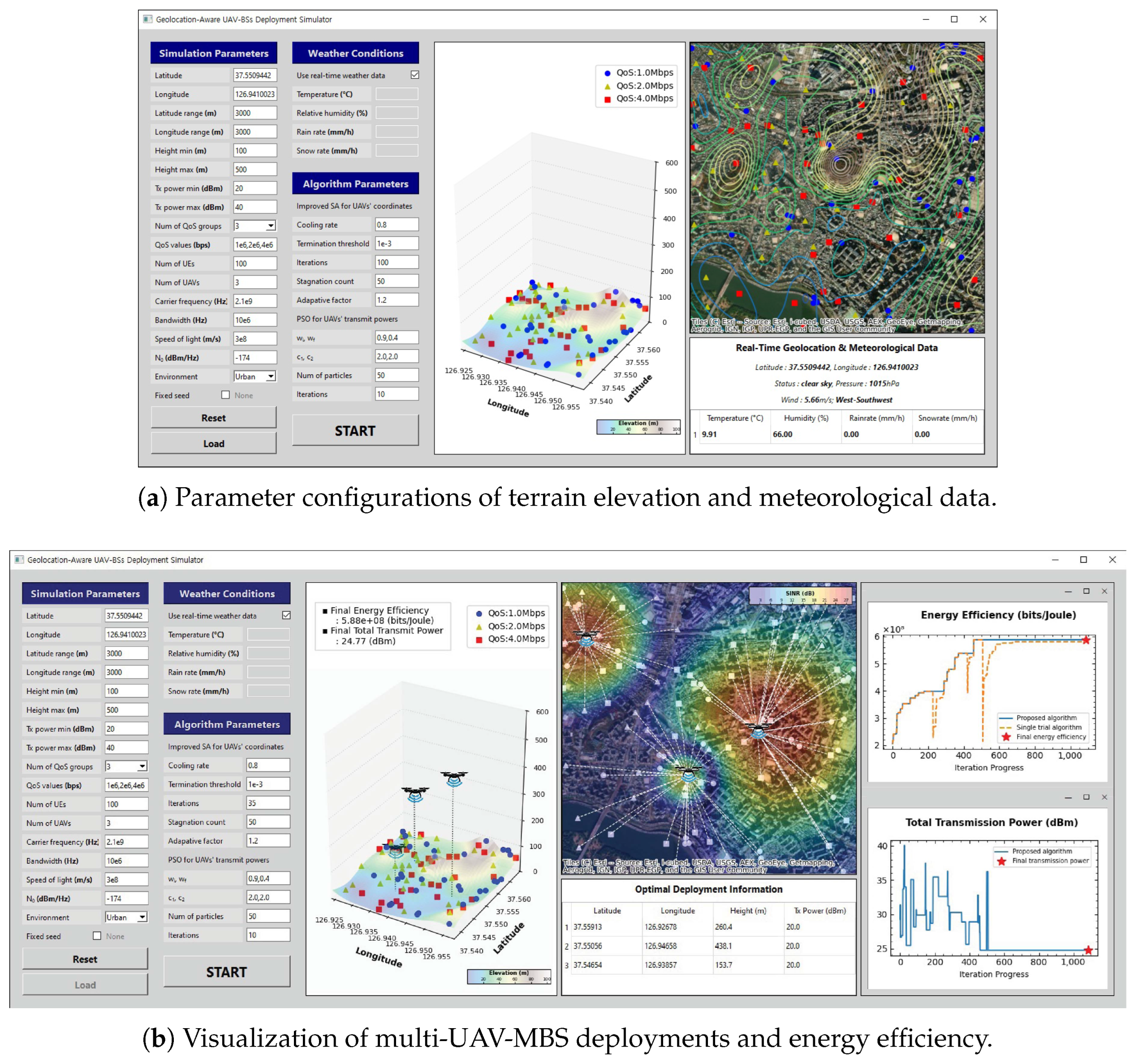
5. Simulator Development
- The operator can build arbitrary simulation environments by configuring various parameters, including the number of UAV-MBSs and UE devices, QoS requirements, carrier frequency and bandwidth, geographic location in latitude and longitude, and regional characteristics.
- The simulator performs simulations based on the terrain data and real-time meteorological conditions of the selected area and provides analytical results. Additionally, the operator can control the algorithm’s progress by modifying its hyperparameters.
- The simulator interacts with the operator in real time, i.e., the simulator visualizes UAV-MBS deployments and shows the progress of the algorithm through graphs.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Raschella, A.; Mackay, M. Editorial for the special issue on moving towards 6G wireless technologies. Future Internet 2024, 16, 400. [Google Scholar] [CrossRef]
- Ersin, I.; Akkas, M.A.; Dagdeviren, O. Communication disruption analysis of UAV-assisted terahertz-enabled 6G base station in internet of flying things. In Proceedings of the International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Türkiye, 21–22 September 2024; pp. 1–8. [Google Scholar]
- Liaq, M.; Ejaz, W. Minimizing delay in UAV-aided federated learning for IoT applications with straggling devices. IEEE Open J. Commun. Soc. 2024, 5, 7653–7667. [Google Scholar] [CrossRef]
- Lorincz, J.; Matijevic, T.; Petrovic, G. On interdependence among transmit and consumed power of macro base station technologies. Comput. Commun. 2014, 50, 10–28. [Google Scholar] [CrossRef]
- Lorincz, J.; Klarin, Z.; Begusic, D. Modeling and analysis of data and coverage energy efficiency for different demographic areas in 5G networks. IEEE Syst. J. 2022, 16, 1056–1067. [Google Scholar] [CrossRef]
- Umair, M.; Joung, J.; Cho, Y.S. Transmission power and altitude design for energy-efficient mission completion of small-size unmanned aerial vehicle. Electron. Lett. 2020, 56, 1219–1222. [Google Scholar] [CrossRef]
- You, J.; Jung, S.; Seo, J.; Kang, J. Energy-efficient 3-D placement of an unmanned aerial vehicle base station with antenna tilting. IEEE Commun. Lett. 2020, 24, 1323–1327. [Google Scholar] [CrossRef]
- Sabzehali, J.; Shah, V.K.; Fan, Q.; Choudhury, B.; Liu, L.; Reed, J.H. Optimizing number, placement, and backhaul connectivity of multi-UAV networks. IEEE Internet Things J. 2022, 9, 21548–21560. [Google Scholar] [CrossRef]
- Luo, X.; Xie, J.; Xiong, L.; Wang, Z.; Tian, C. 3-D deployment of multiple UAV-mounted mobile base stations for full coverage of IoT ground users with different QoS requirements. IEEE Commun. Lett. 2022, 26, 3009–3013. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Sawalmeh, A.; Othman, N.S.; Liu, G.; Khreishah, A.; Alenezi, A.; Alanazi, A. Power-efficient wireless coverage using minimum number of UAVs. Sensors 2022, 22, 223. [Google Scholar] [CrossRef]
- Qin, J.; Wei, Z.; Qiu, C.; Feng, Z. Edge-prior placement algorithm for UAV-mounted base stations. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Mayor, V.; Estepa, R.; Estepa, A.; Madinabeitia, G. Energy-efficient UAVs deployment for QoS-guaranteed VoWiFi service. Sensors 2020, 20, 4455. [Google Scholar] [CrossRef]
- Sanchez-Aguero, V.; Valera, F.; Vidal, I.; Na, C.T.; Hesselbach, X. Energy-aware management in multi-UAV deployments: Modelling and strategies. Sensors 2020, 20, 2791. [Google Scholar] [CrossRef] [PubMed]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Yu, Y. Optimization of UAV coverage efficiency based on improved random wandering algorithm. In Proceedings of the International Conference on Mechatronics Technology and Intelligent Manufacturing (ICMTIM), Nanjing, China, 26–28 May 2023; pp. 319–324. [Google Scholar]
- Khuwaja, A.A.; Zheng, G.; Chen, Y.; Feng, W. Optimum deployment of multiple UAVs for coverage area maximization in the presence of co-channel interference. IEEE Access 2019, 7, 85203–85212. [Google Scholar] [CrossRef]
- Zhong, X.; Huo, Y.; Dong, X.; Liang, Z. QoS-compliant 3-D deployment optimization strategy for UAV base stations. IEEE Syst. J. 2021, 15, 1795–1803. [Google Scholar] [CrossRef]
- Lim, N.H.Z.; Lee, Y.L.; Tham, M.L.; Chang, Y.C.; Sim, A.G.H.; Qin, D. Coverage optimization for UAV base stations using simulated annealing. In Proceedings of the IEEE Malaysia International Conference on Communication (MICC), Virtual, 1–2 December 2021; pp. 43–48. [Google Scholar]
- Lai, C.C.; Tsai, A.H.; Ting, C.W.; Lin, K.H.; Ling, J.C.; Tsai, C.E. Interference-aware deployment for maximizing user satisfaction in multi-UAV wireless networks. IEEE Wirel. Commun. Lett. 2023, 12, 1189–1193. [Google Scholar] [CrossRef]
- Du, W.; Ying, W.; Yang, P.; Cao, X.; Yan, G.; Tang, K.; Wu, D. Network-based heterogeneous particle swarm optimization and its application in UAV communication coverage. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 4, 312–323. [Google Scholar] [CrossRef]
- Kang, Z.; You, C.; Zhang, R. 3D placement for multi-UAV relaying: An iterative Gibbs-sampling and block coordinate descent optimization approach. IEEE Trans. Commun. 2021, 69, 2047–2062. [Google Scholar] [CrossRef]
- Valiulahi, I.; Masouros, C. Multi-UAV deployment for throughput maximization in the presence of co-channel interference. IEEE Internet Things J. 2021, 8, 3605–3618. [Google Scholar] [CrossRef]
- Zhu, X.; Zhai, L.; Li, N.; Li, Y.; Yang, F. Multi-objective deployment optimization of UAVs for energy-efficient wireless coverage. IEEE Trans. Commun. 2024, 72, 3587–3601. [Google Scholar] [CrossRef]
- Kirubakaran, B.; Vikhrova, O.; Andreev, S.; Hosek, J. UAV-BS integration with urban infrastructure: An energy efficiency perspective. IEEE Commun. Mag. 2025, 63, 100–106. [Google Scholar] [CrossRef]
- Lakshmi, J.V.N.; Pallavi, M.O. A hybrid recommendation model for tourist using evolutionary algorithm combined with local search algorithm for trip planning. SN Comput. Sci. 2024, 5, 1–13. [Google Scholar] [CrossRef]
- Tompa, T.; Kovács, S. Integrating expert knowledge into fuzzy reinforcement learning. In Proceedings of the IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 23–25 May 2024; pp. 333–338. [Google Scholar]
- Ikotun, A.M.; Almutari, M.S.; Ezugwu, A.E. K-means-based nature-inspired metaheuristic algorithms for automatic data clustering problems: Recent advances and future directions. Appl. Sci. 2021, 11, 11246. [Google Scholar] [CrossRef]
- Mishra, L.; Kaabouch, N. Impact of weather factors on unmanned aerial vehicles’ wireless communications. Future Internet 2025, 17, 27. [Google Scholar] [CrossRef]
- Song, M.; Huo, Y.; Liang, Z.; Dong, X.; Lu, T. UAV communication recovery under meteorological conditions. Drones 2023, 7, 423. [Google Scholar] [CrossRef]
- Saif, A.; Shah, N.S.M.; Alnoamani, A.; Ameen, A.; Curry, E.; Khattat, V.H.F.A.; Alsamhi, S.H. Resilient skies: Advancing climate-resilient UAVs for energy-efficient B5G communication in challenging environments. In Proceedings of the International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 6–7 August 2024; pp. 1–7. [Google Scholar]
- Specific Attenuation Model for Rain for Use in Prediction Methods. Recommendation P.838-3, International Telecommunication Union—Radiocommunication Sector (ITU-R). 2005. Available online: https://www.itu.int/rec/R-REC-P.838-3-200503-I/en (accessed on 10 January 2025).
- Attenuation by Atmospheric Gases. Recommendation P.676-11, International Telecommunication Union—Radiocommunication Sector (ITU-R). 2016. Available online: https://www.itu.int/rec/R-REC-P.676-11-201609-I/en (accessed on 10 January 2025).
- Baidya, S.; Shaikh, Z.; Levorato, M. FlyNetSim: An open source synchronized UAV network simulator based on ns-3 and Ardupilot. In Proceedings of the International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM), Montreal, QC, Canada, 28 October–2 November 2018; pp. 37–45. [Google Scholar]
- Park, S.; La, W.G.; Lee, W.; Kim, H. Devising a distributed co-simulator for a multi-UAV network. Sensors 2020, 20, 6196. [Google Scholar] [CrossRef]
- Grieco, G.; Iacovelli, G.; Boccadoro, P.; Grieco, L.A. Internet of drones simulator: Design, implementation, and performance evaluation. IEEE Internet Things J. 2023, 10, 1476–1498. [Google Scholar] [CrossRef]
- Grieco, G.; Iacovelli, G.; Pugliese, D.; Striccoli, D.; Grieco, L.A. A system-level simulation module for multi-UAV IRS-assisted communications. IEEE Trans. Veh. Technol. 2024, 73, 6740–6751. [Google Scholar] [CrossRef]
- French, A.; Mozaffari, M.; Eldosouky, A.; Saad, W. Environment-aware deployment of wireless drones base stations with Google earth simulator. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 868–873. [Google Scholar]
- Tropea, M.; Fazio, P.; Rango, F.D.; Cordeschi, N. A new FANET simulator for managing drone networks and providing dynamic connectivity. Electronics 2020, 9, 543. [Google Scholar] [CrossRef]
- Siddiqui, A.B.; Aqeel, I.; Alkhayyat, A.; Javed, U.; Kaleem, Z. Prioritized user association for sum-rate maximization in UAV-assisted emergency communication: A reinforcement learning approach. Drones 2022, 6, 45. [Google Scholar] [CrossRef]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Oguchi, T. Electromagnetic wave propagation and scattering in rain and other hydrometeors. Proc. IEEE 1983, 71, 1029–1078. [Google Scholar] [CrossRef]
- Luomala, J.; Hakala, I. Effects of temperature and humidity on radio signal strength in outdoor wireless sensor networks. In Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 1247–1255. [Google Scholar]
- Sedighizadeh, D.; Masehian, E. Particle swarm optimization methods, taxonomy and applications. Int. J. Comput. Theory Eng. 2009, 1, 486–502. [Google Scholar] [CrossRef]
- Amine, K. Multiobjective simulated annealing: Principles and algorithm variants. Adv. Oper. Res. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Patel, V.; Mehta, R. Impact of outlier removal and normalization approach in modified k-means clustering algorithm. Int. J. Comput. Sci. Issues 2011, 8, 1–6. [Google Scholar]
- Qiao, J.; Li, S.; Liu, M.; Yang, Z.; Chen, J.; Liu, P.; Li, H.; Ma, C. A modified particle swarm optimization algorithm for a vehicle scheduling problem with soft time windows. Sci. Rep. 2023, 13, 18351. [Google Scholar] [CrossRef]
- Min, G.; So, J. Energy-efficient UAV Deployment Simulator. 2025. Available online: https://github.com/CNL-sogang/UAV-deployment-simulator (accessed on 15 May 2025).
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Yang, C.H.; Hsiao, C.J.; Chuang, L.Y. Linearly decreasing weight particle swarm optimization with accelerated strategy for data clustering. IAENG Int. J. Comput. Sci. 2010, 37, 1–8. [Google Scholar]
- Song, X.; Hu, S. 2D path planning with dubins-path-based A* algorithm for a fixed-wing UAV. In Proceedings of the IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; pp. 69–73. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| x-range of simulation space, | |
| y-range of simulation space, | |
| z-range of simulation space, | |
| Transmission power-range of UAV-MBSs, | |
| Number of UAV-MBSs, K | 3 |
| Number of UE devices, N | 100 |
| Set of QoS requirements, | |
| Carrier frequency, | 2.1 GHz |
| Speed of light, c | m/s |
| Noise power spectral density, | −174 dBm/Hz |
| Channel bandwidth, B | 10MHz |
| Environment-dependent constants, | |
| Additional path loss, |
| Parameter | Value |
|---|---|
| Cooling rate, | 0.8 |
| Adjustment factor, | 1.1 |
| Termination threshold factor, | |
| Horizontal and vertical step range, | m |
| Maximum horizontal and vertical step ranges, | m |
| Maximum stagnation count, | 500 |
| Maximum SA iteration, | 350 |
| Maximum PSO iteration, | 50 |
| Number of particles, M | 10 |
| Initial and final inertia coefficients, | |
| Cognitive and special coefficients, |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, G.; So, J. Energy-Efficient Deployment Simulator of UAV-Mounted Base Stations Under Dynamic Weather Conditions. Sensors 2025, 25, 3648. https://doi.org/10.3390/s25123648
Min G, So J. Energy-Efficient Deployment Simulator of UAV-Mounted Base Stations Under Dynamic Weather Conditions. Sensors. 2025; 25(12):3648. https://doi.org/10.3390/s25123648
Chicago/Turabian StyleMin, Gyeonghyeon, and Jaewoo So. 2025. "Energy-Efficient Deployment Simulator of UAV-Mounted Base Stations Under Dynamic Weather Conditions" Sensors 25, no. 12: 3648. https://doi.org/10.3390/s25123648
APA StyleMin, G., & So, J. (2025). Energy-Efficient Deployment Simulator of UAV-Mounted Base Stations Under Dynamic Weather Conditions. Sensors, 25(12), 3648. https://doi.org/10.3390/s25123648