1. Introduction
Wireless sensor networks (WSNs), empowered by compact micro-electromechanical system (MEMS) technologies, are widely used in applications such as environmental monitoring and disaster management. These networks face persistent challenges, including energy constraints and coverage optimization, especially in dynamic and inaccessible environments [
1]. Unlike traditional networks, WSNs operate autonomously without fixed infrastructure and are specifically designed to monitor and communicate various physical or environmental parameters, including temperature, motion, noise, pressure, vibration, and pollution [
2]. These networks rely on a central entity commonly referred to as a sink or base station that acts as a bridge between users and the network, enabling data access and query functionality. A typical WSN comprises hundreds or even thousands of sensor nodes, requiring advanced and adaptive protocol designs to effectively operate within dynamic environments and limited resource conditions [
3]. Over the past decade, there has been a significant surge in research, standardization efforts, and industrial investment in WSN technologies [
4]. WSNs are now integral to a wide range of applications, particularly in scenarios where human access is limited, such as environmental monitoring, disaster recovery, pollution detection, military surveillance, healthcare systems, and smart home environments [
5].
Each sensor node in a WSN is capable of independently collecting, storing, processing, and exchanging environmental data with neighboring nodes [
6]. However, coverage gaps in areas not monitored by any sensor can emerge when regions fall outside the sensing range. To address this, researchers have proposed integrating mobile nodes with energy-efficient metaheuristics like the scalable firefly algorithm, which enhances coverage by dividing the network into manageable cells and enabling accurate estimation of physical coverage [
7]. Additionally, hybrid optimization frameworks, such as those combining branch-and-cut algorithms with reinforcement learning, have been developed to ensure comprehensive coverage. To further improve network performance and mitigate interference, effective strategies for beamforming and re-optimization are crucial [
8]. A notable contribution in this area is the wireless sensor network hole detection (WHD) technique, which quantifies the presence of coverage holes in randomly deployed sensor fields within regions of interest (ROIs) [
9]. This method incorporates metrics such as average hole detection time to balance energy efficiency with quality of service (QoS) objectives [
10].
Current research primarily focuses on developing computationally and energy-efficient algorithms and protocols, particularly for monitoring and control applications [
11]. Despite their capabilities, sensor nodes are constrained by limited battery life, processing power, and memory for data transmission and detection [
12]. The accuracy and comprehensiveness of the data collected improve when sensors are positioned closer to the observed events. Since their introduction, WSNs have found extensive use in security and surveillance, as well as in industries like factory automation, military operations, remote patient monitoring, environmental observation, and disaster prediction [
13,
14,
15,
16,
17]. Sensor nodes play a critical role in these applications, gathering essential environmental data and transmitting it to the base station (BS) or sink via multicast communication [
18]. However, the network’s structure may increase energy consumption in nearby nodes, potentially causing energy depletion or “holes” within the network [
19]. Generally, WSNs consist of numerous sensor nodes transmitting environmental data to a base station for aggregation and analysis.
Coverage maintenance remains a key challenge due to battery limitations and node failures. Several lightweight distributed methods have been proposed to detect and address coverage gaps using mobile nodes, though many incur significant communication overhead [
20,
21]. In WSNs, a two-step process is typically employed to maintain coverage. First, a lightweight distributed system enables nodes to assess their environment and identify coverage gaps [
22]. Once the number of gaps exceeds a certain threshold, the algorithm selects and prioritizes mobile nodes to fill these gaps, focusing on those closest to the gaps and with the highest priority. Over the past decade, advancements in embedded micro-sensing and wireless communication technologies have led to the development of increasingly compact and affordable wireless devices [
23]. Several techniques leverage nodal attributes related to network topology and geometric connectivity to detect coverage gaps. However, most algorithms require a high average node degree to identify specific patterns, resulting in significant communication overhead [
24]. Notably, while these methods can identify nodes near coverage gaps, they do not provide efficient clustering mechanisms, which could simplify coverage maintenance. This high communication cost, unfortunately, shortens the lifespan of WSNs considerably. Similarly, our PSO-based approach enhances sensor placement and coverage in WSNs to improve overall network performance. Recent research on active reconfigurable intelligent surface (RIS)-aided non-orthogonal multiple access (NOMA)-enabled space–air–ground integrated network (SAGIN) with UAVs highlights advanced energy-efficient optimization strategies [
25]. Similarly, our PSO-based approach enhances sensor placement and coverage in WSNs to improve overall network performance.
Extending network lifetime is challenging due to limited data speed and the difficulty of replacing or recharging batteries in randomly dispersed sensor nodes (SNs), often in inaccessible areas [
26]. Moreover, energy consumption increases more than linearly with communication distance, underscoring the critical need for efficient energy management strategies. In multi-hop communication systems, sensor nodes located near the sink experience disproportionately heavy traffic loads, causing their energy to deplete faster—this phenomenon is commonly referred to as the “Energy Sink-Holes Problem” or “Bottleneck Problem” [
27,
28]. To address coverage optimization, a perception model combining path loss and false alarm probability has been developed [
29]. Furthermore, a novel multi-objective optimization framework has been proposed for heterogeneous-function WSNs, balancing coverage, connectivity, and cost. This approach introduces an additional cost dimension to accommodate the distinct monitoring requirements of various functional sensors within specific areas. By employing an efficient node deployment strategy, redundancy and costs are reduced while simultaneously improving network coverage, robustness, energy efficiency, and load balancing, ultimately contributing to an extended network lifetime [
30]. To maximize coverage, minimize the number of deployed nodes, and maintain network connectivity, the proposed method is based on a novel optimization approach called the Nutcracker Optimization Algorithm (NOA) [
31]. Reliable Clustering with Optimized Scheduling and Routing for Wireless Sensor Networks introduces a novel GridCosins Chain Clustering technique that uses GridCosins distance for node grouping and forms distance-based tree topologies, reducing transmission range and enhancing network lifetime [
32].
Ensuring complete coverage in WSNs is a complex task that has attracted considerable research focused on developing effective solutions to close coverage gaps, improve network efficiency, and enhance overall performance. As a result, there have been many recent research developments. Multi-objective coverage algorithms for WSNs that optimize energy-saving and coverage rate metrics are noteworthy advances [
33]. The whale optimization algorithm (WOA), which draws inspiration from the hunting strategies of whales, has also been used to optimize WSNs [
34]. Reverse learning has been included to increase network coverage. Furthermore, it has been suggested that Lévy flights be included in WOA to guarantee extensive network coverage. The bee algorithm, particle swarm optimization algorithm, weed algorithm, wolf pack algorithm, glowworm swarm optimization, simulated annealing (SA), ant colony optimization (ACO), improved grey wolf optimizer with multi-strategies, improved cuckoo search, and social spider optimization (SSO) are some of the other intelligent optimization algorithms that have been investigated. Together, these various algorithms help to advance coverage tactics in WSNs.
Recent research has demonstrated the effectiveness of PSO-based techniques in WSN optimization, particularly in enhancing localization accuracy through error minimization and sensor placement optimization [
35]. In reconfigurable WSNs (RWSNs), PSO-based algorithms address complex multi-peak optimization problems, improving sensor deployment efficiency and coverage quality [
36]. Self-adaptive estimation PSO (SEPSO) further refines sensor placement by reducing computation time compared to traditional methods like the virtual force approach [
37]. In heterogeneous WSNs (HWSNs), PSO-based methods enhance energy efficiency and convergence speed while minimizing redundancy and coverage gaps [
38]. Deploying sensors in 3D WSNs presents additional challenges due to higher deployment costs and connectivity constraints, where PSO variants such as virtual force-directed PSO (VFPSO) have been proposed to maximize coverage while minimizing energy consumption [
39]. Moreover, integrating PSO with variable domain chaos optimization (VDCOA) has been shown to improve network efficiency, sensor distribution, and coverage rates [
40]. In WSN clustering, PSO has been utilized for optimal cluster head selection by leveraging hybrid PSO and K-means clustering to enhance network lifespan and balance energy consumption [
41].
Particle swarm optimization, developed over the past two decades, offers significant advantages over previous intelligent optimization techniques, including simpler iteration rules and faster convergence rates [
42]. This optimization algorithm has been effectively implemented across various engineering domains. For instance, co-evolutionary PSO algorithms have been employed to explore dynamic deployment optimization in WSNs [
43]. Optimization algorithms play a crucial role in enhancing WSN’s performance. The hybridization of the global PSO algorithm with shuffled frog leaping optimization has resulted in a more effective problem-solving approach [
44]. Furthermore, hybrid algorithms integrating PSO with Genetic Algorithms have been developed to maximize WSN coverage. At the same time, a combination of PSO and simulated annealing has been proposed for energy-efficient coverage optimization [
45].
Motivation
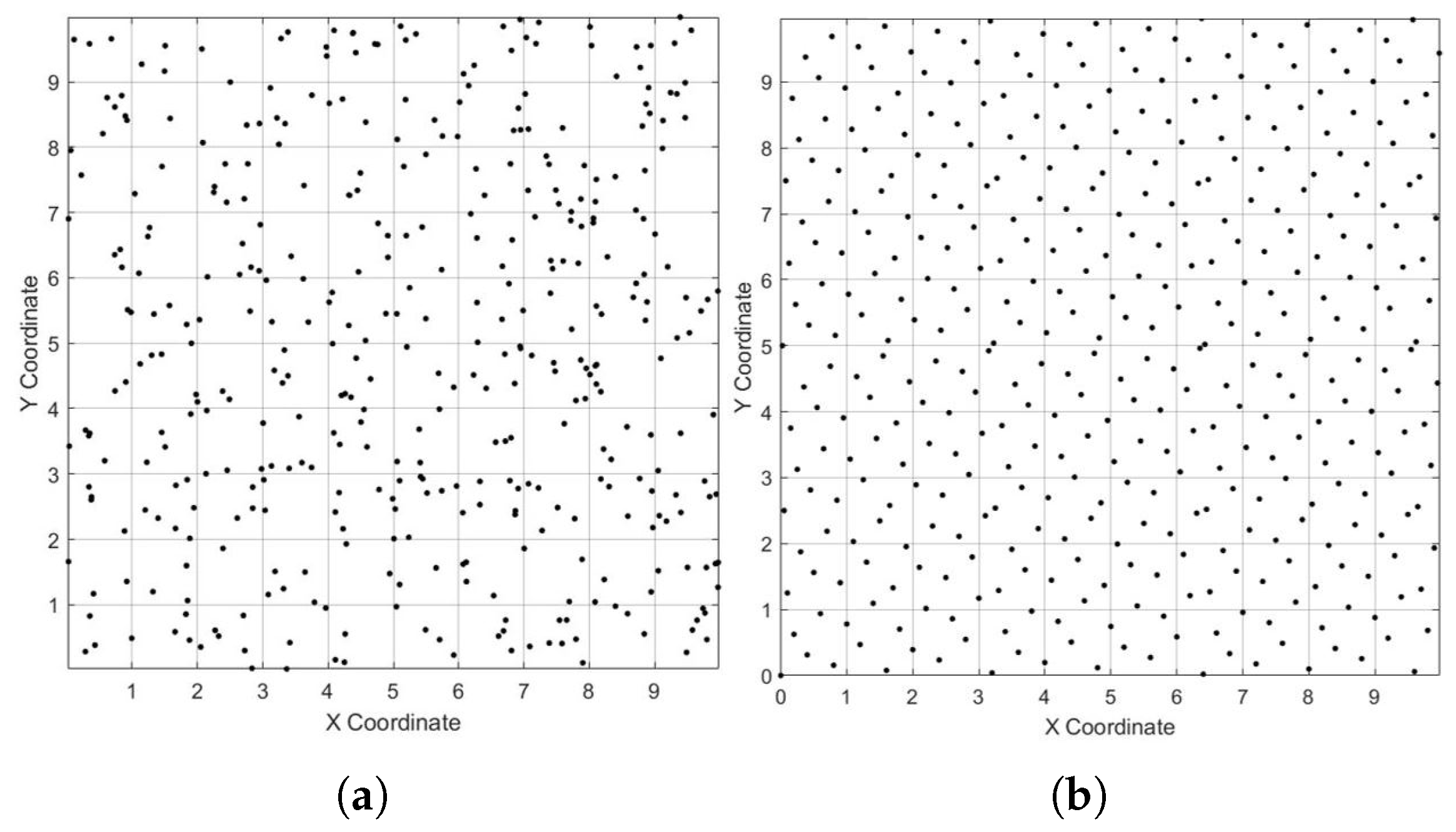
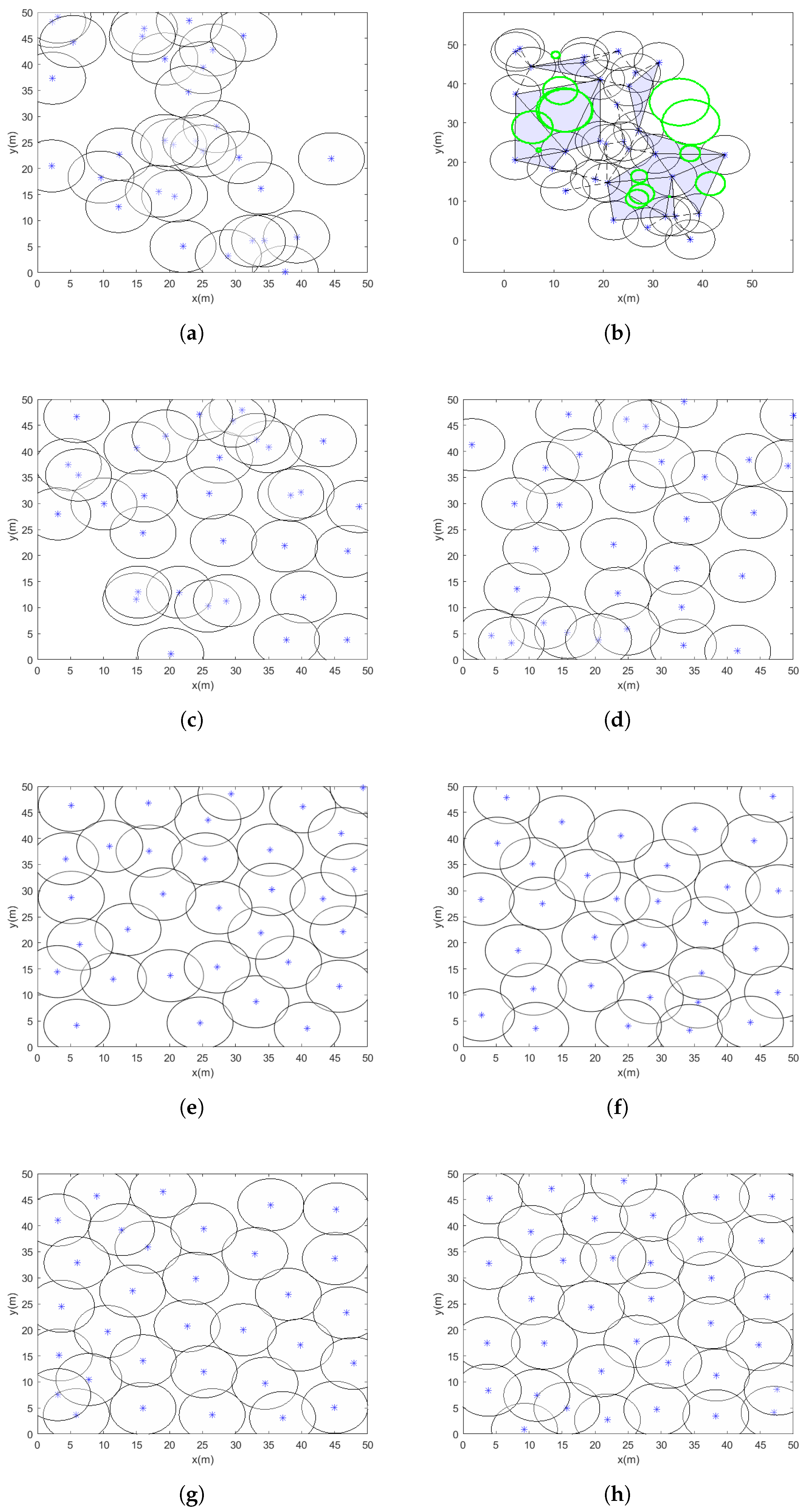
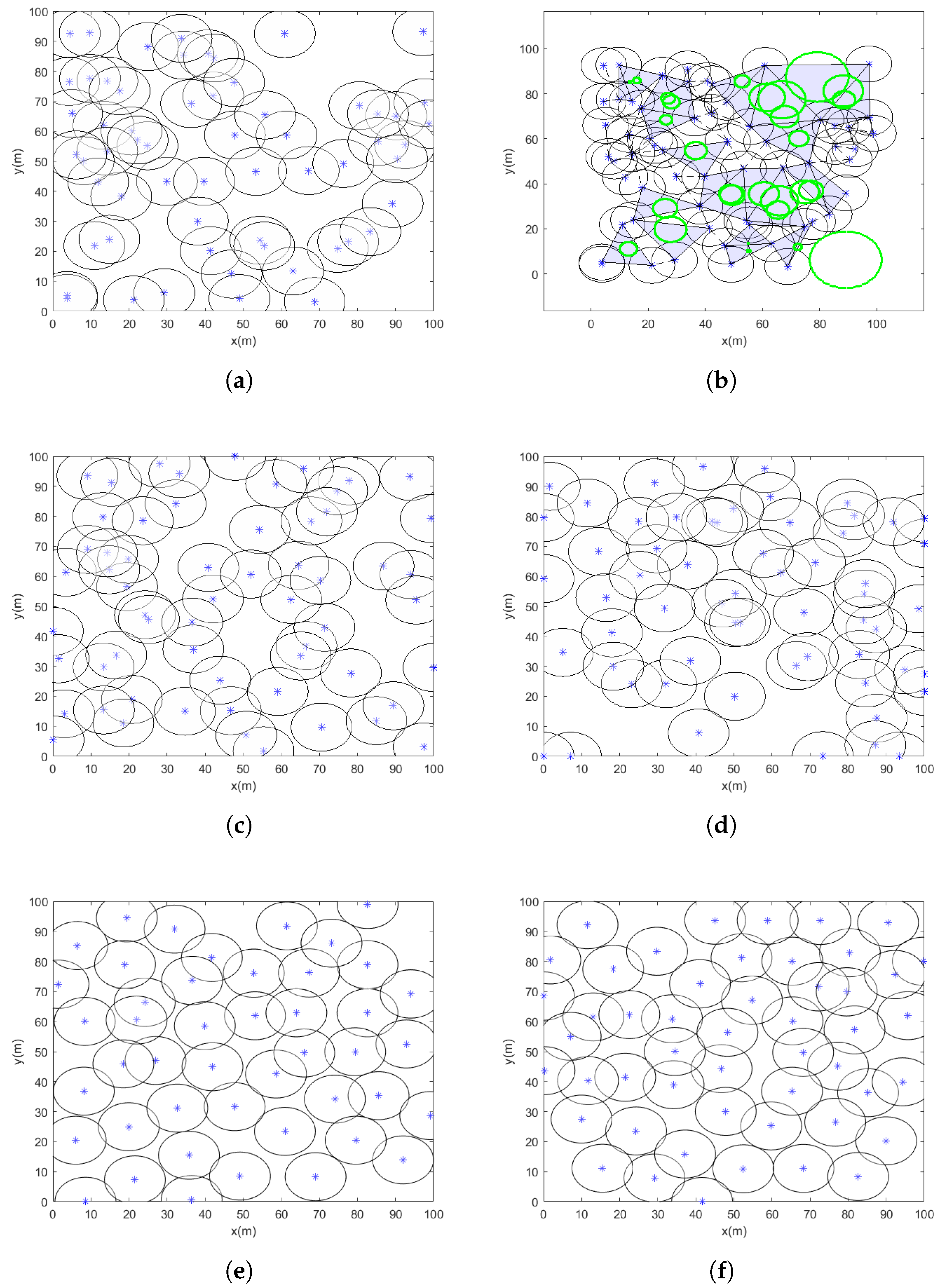
WSNs are widely used in applications that require reliable and high-quality coverage, such as environmental monitoring, surveillance, and industrial automation. However, achieving uniform sensor distribution and complete area coverage remains a significant challenge. Factors like irregular node placement, limited energy resources, and inefficient deployment strategies often result in coverage gaps and uneven sensing performance. Many existing optimization methods, particularly those based on PSO, struggle with issues such as premature convergence and getting trapped in local optima. These limitations can lead to poor sensor placements and large uncovered areas, which in turn disrupt both sensing and communication, as illustrated by the light blue-highlighted region in
Figure 1.
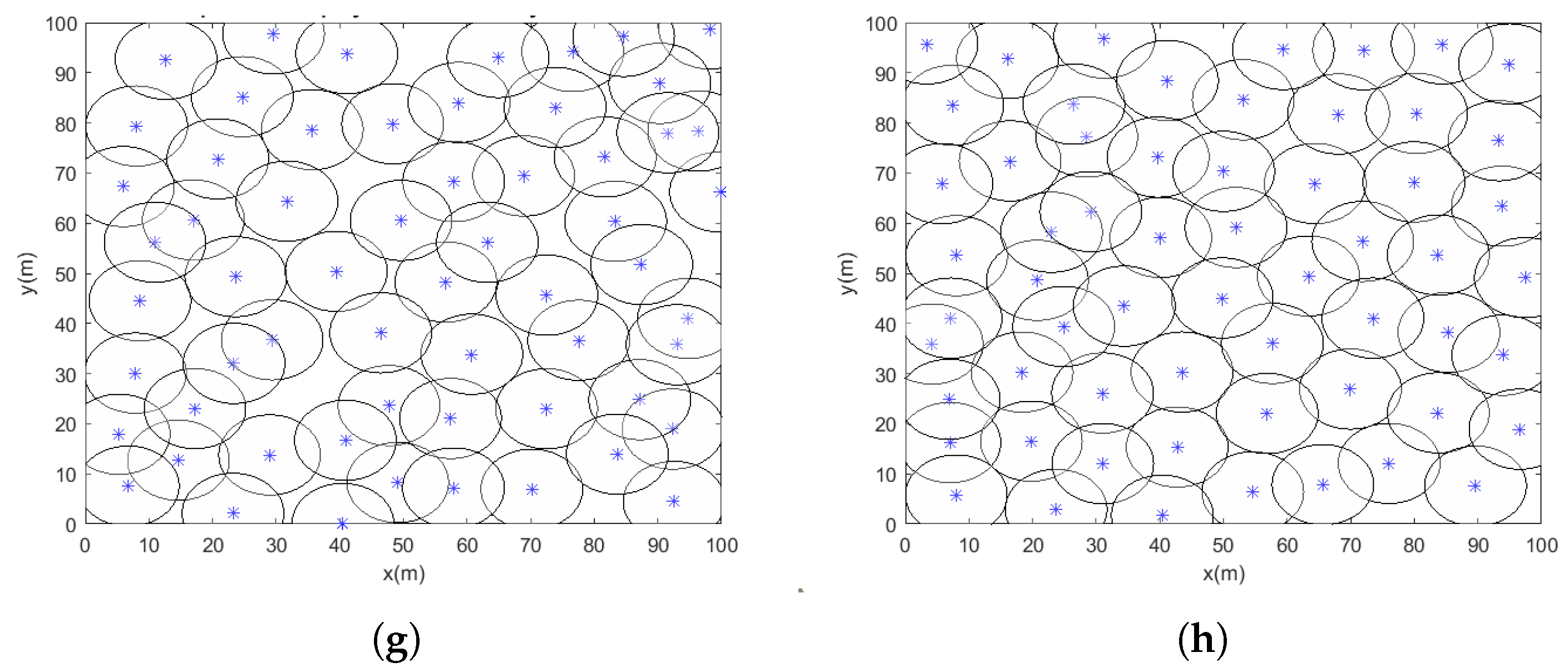
To address these challenges, this paper proposes a velocity-scaled adaptive search factor PSO algorithm, which improves the global search ability and speeds up convergence. The algorithm begins with Hammersley sequence-based initialization to ensure an even initial distribution of nodes, and it uses Delaunay triangulation to effectively detect and resolve coverage holes. The main goal of this research is to offer a robust and efficient optimization technique that ensures maximum coverage, uniform sensor placement, and improved search accuracy. By overcoming the key drawbacks of earlier approaches, the proposed VASF-PSO significantly enhances WSN coverage performance and offers a practical solution for real-world deployments.
2. Related Work
A comprehensive approach integrates deployment, detection, and network models to address coverage gaps with varying characteristics. The framework aims to enhance coverage quality, extend network lifespan, and reduce sensor usage under uncertain parameters [
46]. It employs planning, selection, movement, and decision-making techniques, categorized into distribution, centralization, stochastic, heuristic, approximation, and classical algorithms [
47]. An improved particle swarm optimization algorithm (NS-IPSO) is also introduced to efficiently segment sensor nodes by enhancing distance estimation accuracy between unknown and anchor nodes, enabling better regional division. This approach identifies sensor nodes with shorter paths to anchor nodes, ensuring optimal placement. A surveillance network monitors partial discharges in high-voltage equipment using ultrasonic sensors designed for 3D alignment. A secure sensor cooperation strategy enhances target acquisition, reduces delays, and saves energy [
48]. Advanced algorithms, including Gaussian and polynomial kernel integration and graph-based manifold learning, enable precise localization by mapping physical spaces to high-dimensional data. Their performance has been validated under various conditions. A distributed self-healing mechanism also detects and closes coverage gaps, accurately predicting their size and location. Furthermore, by predicting the amount and location of coverage gaps, a distributed self-healing system automatically finds and fixes them, improving the resilience of networks without the need for centralized control.
WSNs optimize coverage and minimize energy use by coordinating node movements to fill gaps without disrupting connectivity. Sensor nodes share maintenance data with the cluster head (CH), selected based on cooperation rank, transmission rank, and residual energy [
49]. Mobile nodes gather detection data via intermediary channels, reducing latency and energy consumption. A flexible, energy-efficient protocol addresses QoS challenges by accommodating sensor resource constraints. To estimate coverage gaps, a computational geometry method uses Delaunay triangulation and empty circle attributes to identify and assess gaps in large-scale networks [
50].
Contributions
This paper proposes the velocity-scaled adaptive search factor PSO algorithm, which dynamically adjusts the search factor based on the distance of a particle from the swarm’s optimal position, effectively balancing exploration and exploitation. In the PSO algorithm, the search factor controls the impact of the particle’s previous velocity on its current velocity, thereby balancing local and global exploration of the search space. Local exploration focuses on finding the best solutions near the particle’s current position, while global exploration seeks optimal solutions across the entire search space. A lower search factor facilitates local exploitation, while a higher search factor promotes global exploration.
The contributions of the paper are summarized as follows:
Adaptive Algorithm: This paper proposes a new PSO variant where the search factor is dynamically scaled based on particle velocity relative to the global best. Unlike conventional PSO or previous adaptive methods, our algorithm increases the exploration capability when particles are far from the optimal region and enhances exploitation as particles converge. This balance significantly improves convergence speed and solution quality.
Delaunay triangulation: Moreover, although Delaunay triangulation has been applied in computational geometry and certain network-related contexts, its integration into a PSO-based WSN coverage optimization framework is novel. This incorporation enables accurate detection and quantification of coverage holes, allowing the optimization process to directly target practical performance metrics such as redundancy reduction and reliability enhancement in WSN deployments.
Hammersley Sequence-Based Initialization: We replace conventional random initialization with Hammersley sequence-based initialization (HSI) to ensure a well-distributed initial swarm, reducing the likelihood of premature convergence. Our integration of HSI into VASF-PSO demonstrates for the first time its measurable impact on WSN coverage efficiency.
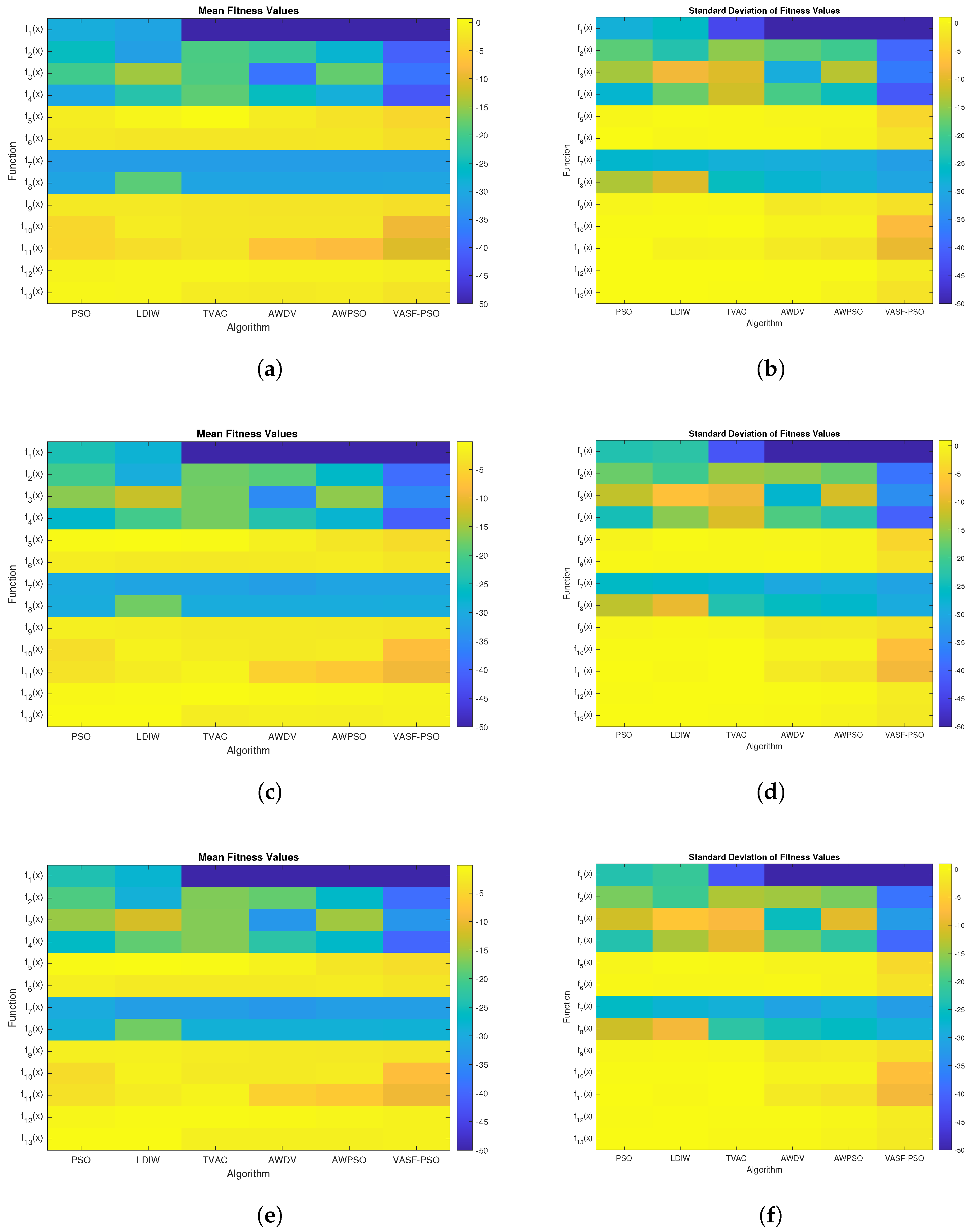
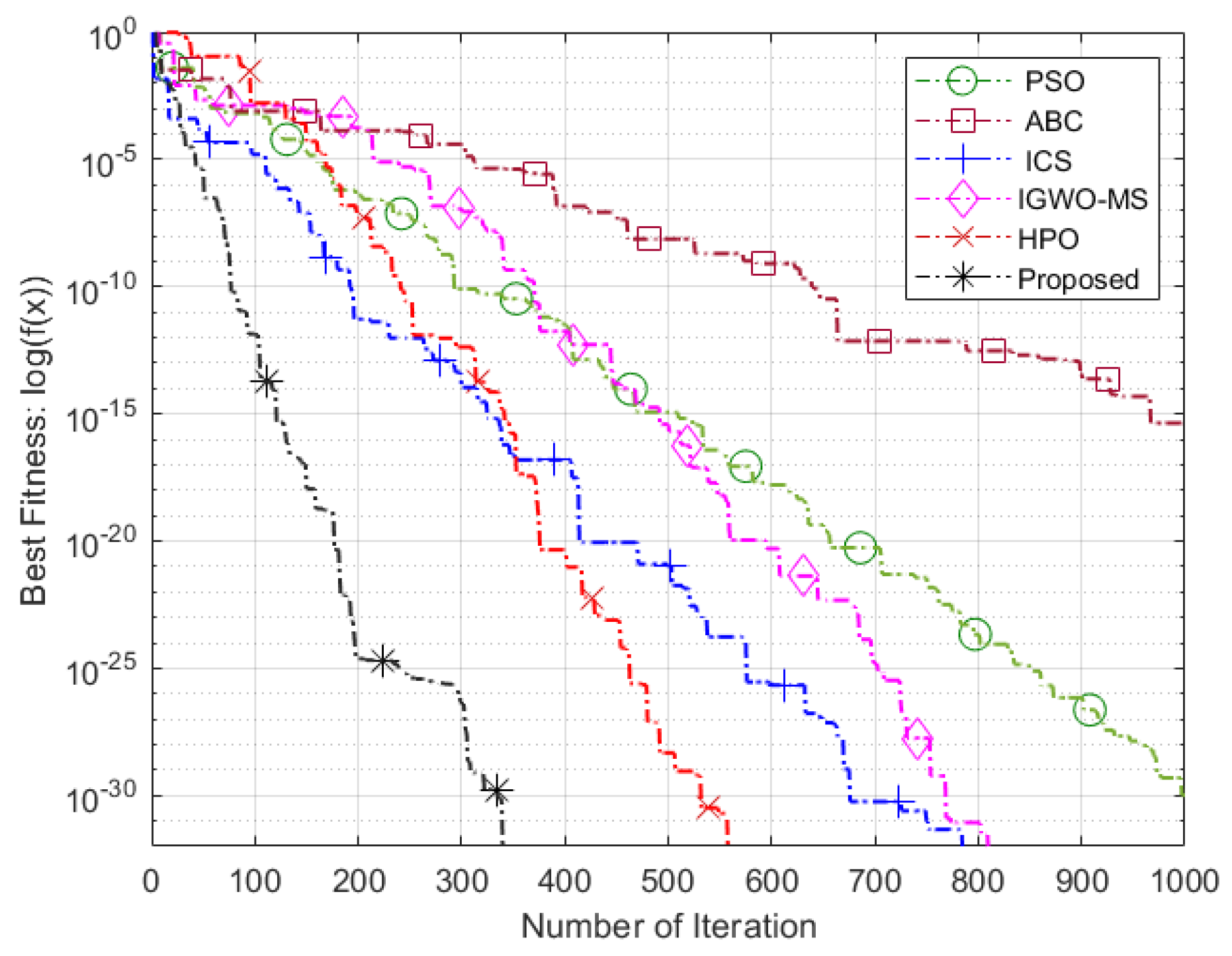
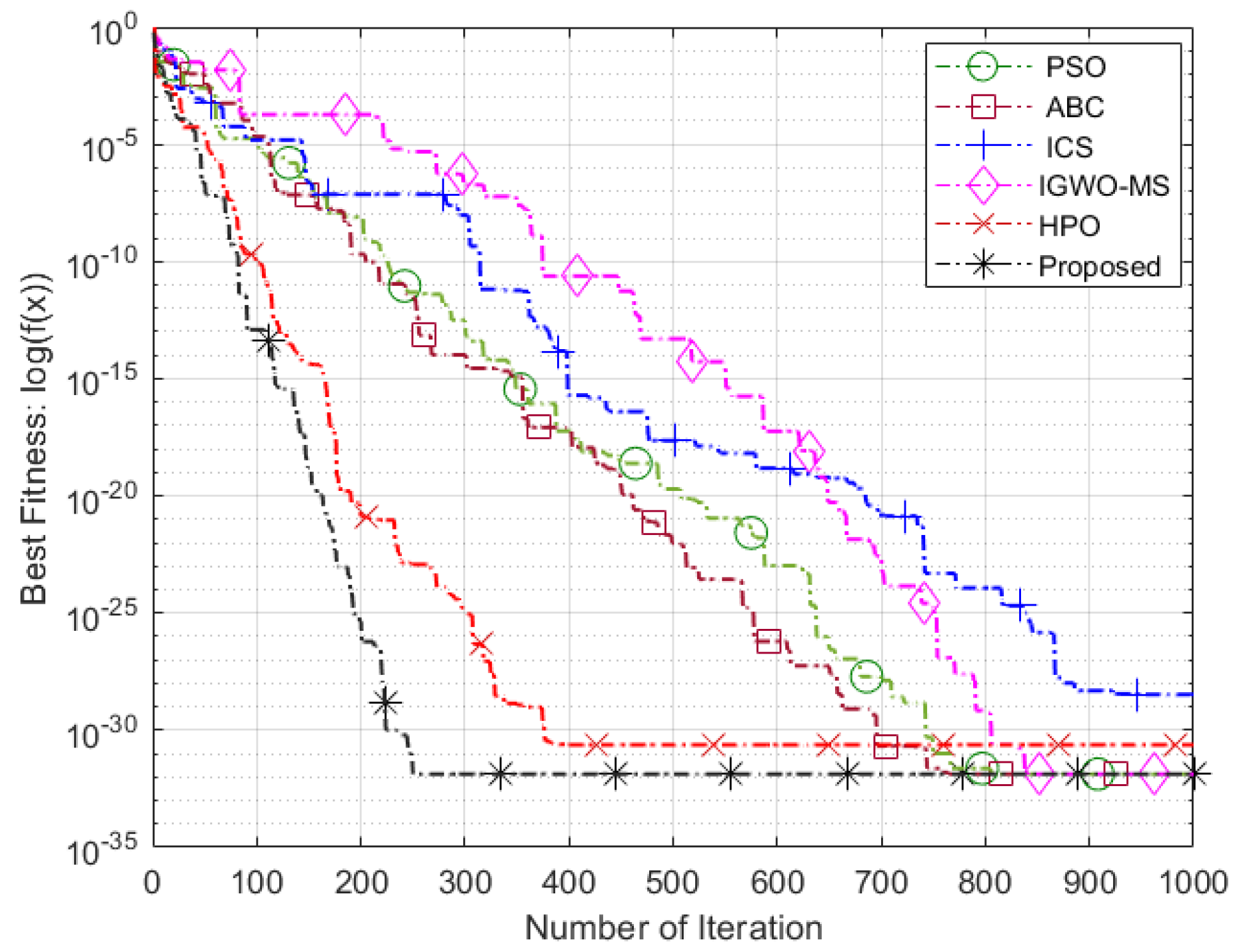
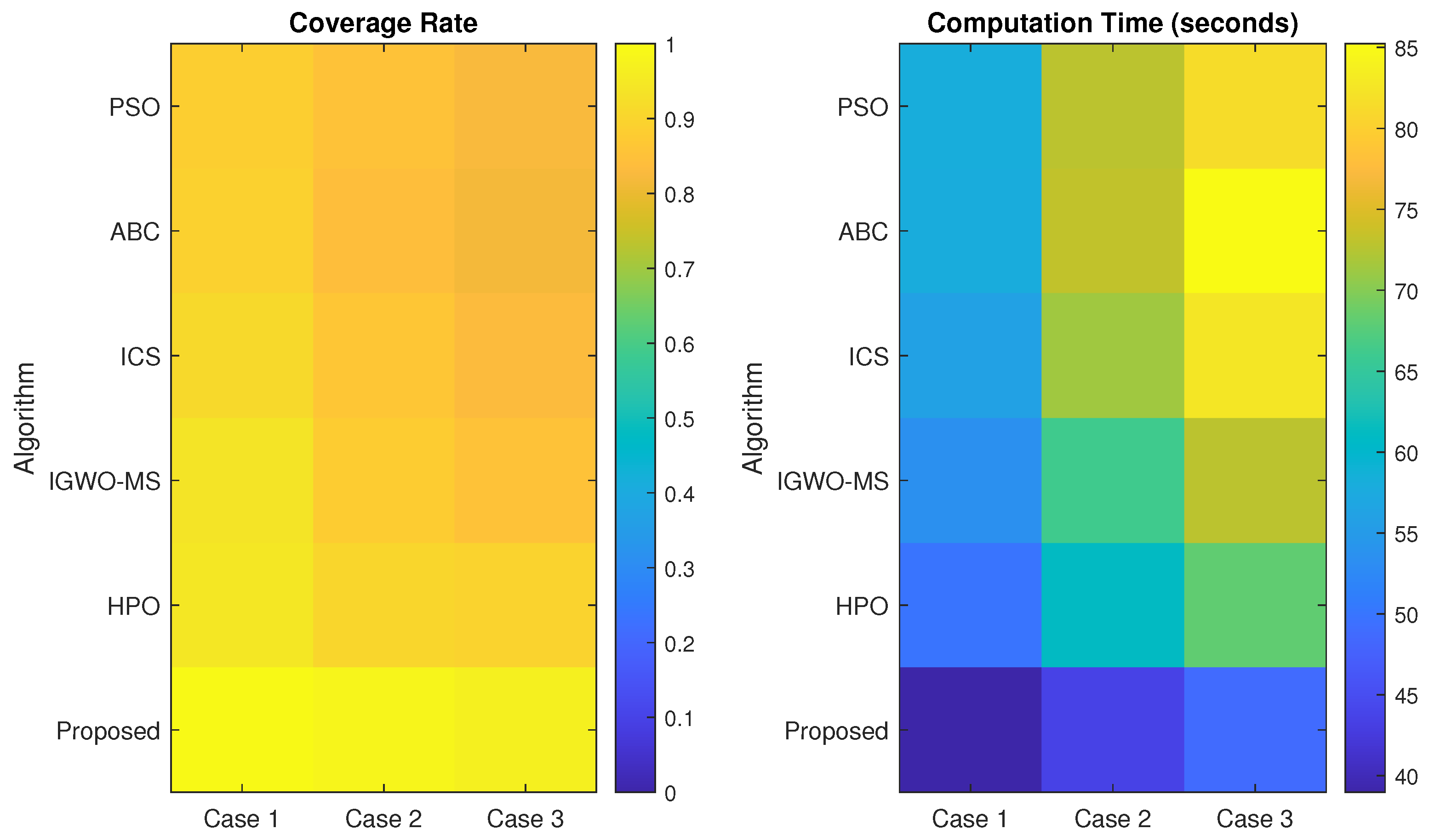
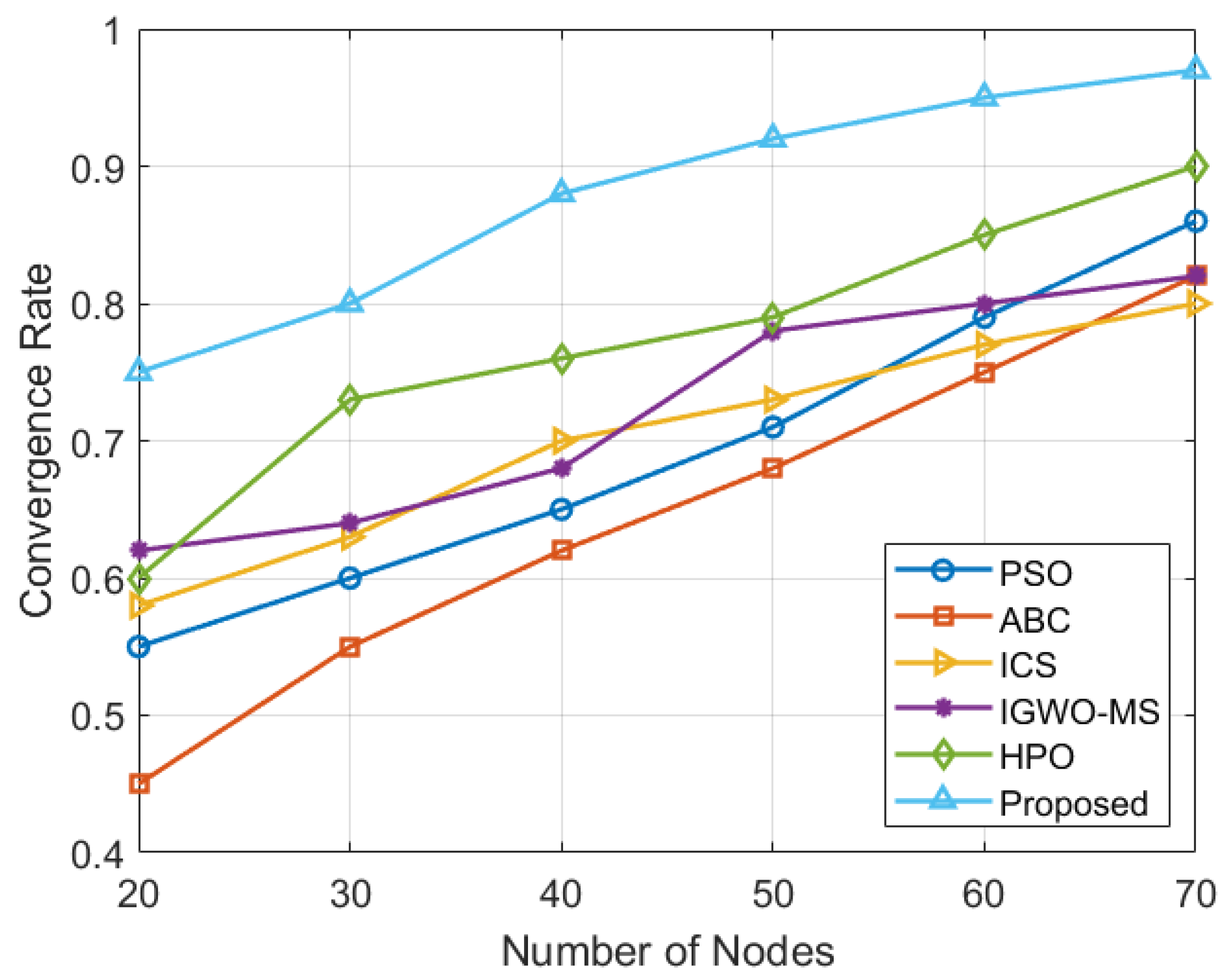
WSN Deployments: The proposed VASF-PSO is evaluated not only on standard benchmark functions but also in real WSN deployment scenarios. We provide a thorough comparison with existing state-of-the-art algorithms (HPO, ABC, IGWO-MS, ICS, and standard PSO), showing superior performance in convergence speed, coverage rate, and node distribution uniformity.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}