
MOT: A Low-Latency, Multichannel Wireless Surface Electromyography Acquisition System Based on the AD8232 Front-End

 , and
, and
Abstract
1. Introduction
- A review of the state-of-the-art methods of sEMG acquisition systems from academic works and commercial solutions is presented to focus on the main features of these devices.
- In this paper, we designed hardware, firmware, and software for multichannel sEMG acquisition.
- We evaluate a full sEMG system development, from electronics design to human–machine interface.
2. Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Wearable | Data Transmission | Channels | BW (Hz) | Fs (kHz) | ADC (bit) |
|---|---|---|---|---|---|---|
| [44] | Yes | Wired | 8 | 15–1000 | 1 | - |
| [54] | Yes | RF | 6 | 20–500 | 1 | 10 |
| [55] | Yes | Wired | 16 | 20–500 | 1 | - |
| [43] | No | BLE | 4 | 8.7–952 | 4 | 14 |
| [45] | Yes | BLE | 2 | - | - | 12 |
| [38] | Yes | WiFi | - | - | 32 | 24 |
| [47] | Yes | Bluetooth | 8 | - | 0.25–1 | 24 |
| [40] | - | No | - | 20–500 | 1 | 16 |
| [39] | Yes | RF | 1 | - | 2 | 10 |
| [24] | Yes | BLE | 3 | <633 | 32 | 24 |
| [56] | Yes | RF | - | 0.07–100 | - | 10 |
| [42] | - | No | - | 10–1000 | 4 | 10 |
| [34] | Yes | RF | 4 | <500 | 1 | 16 |
| [41] | - | RF | - | 0.65–1000 | - | 10 |
| [57] | Yes | No | 1 | 25.67–472.9 | - | 10 |
| [46] | Yes | Bluetooth | 8 | 20–500 | 1 | 16 |
| [58] | Yes | WiFi | 8 | 20–500 | 1 | 12 |
| [59] | Yes | BLE | 1 | 20–450 | 1 | 12 |
| [48] | Yes | WiFi | 16 | - | 1 | 24 |
| [25] | Yes | WiFi | 1 | 20–450 | 2 | 12 |
| DataLITE [51] | No | BLE | 8 | 20–460 | 1 | 14 |
| Trigno Centro [49] | Yes | BLE | 32 | 20–450 | 4.37 | 16 |
| Myo Armband | Yes | BLE | 8 | - | 0.2 | 8 |
| FreeEMG [52] | Yes | - | 10 | - | 1 | 16 |
| Bitalino [60] | Yes | BLE | 4 | 25–482 | 1 | 10 |
| gForcePro+ EMG | Yes | BLE | 8 | - | 0.5 | 12 |
| This work: MOT | Yes | RF (ESP-NOW) | 6 | 19–692 | 1 | 12 |
3. Materials and Methods
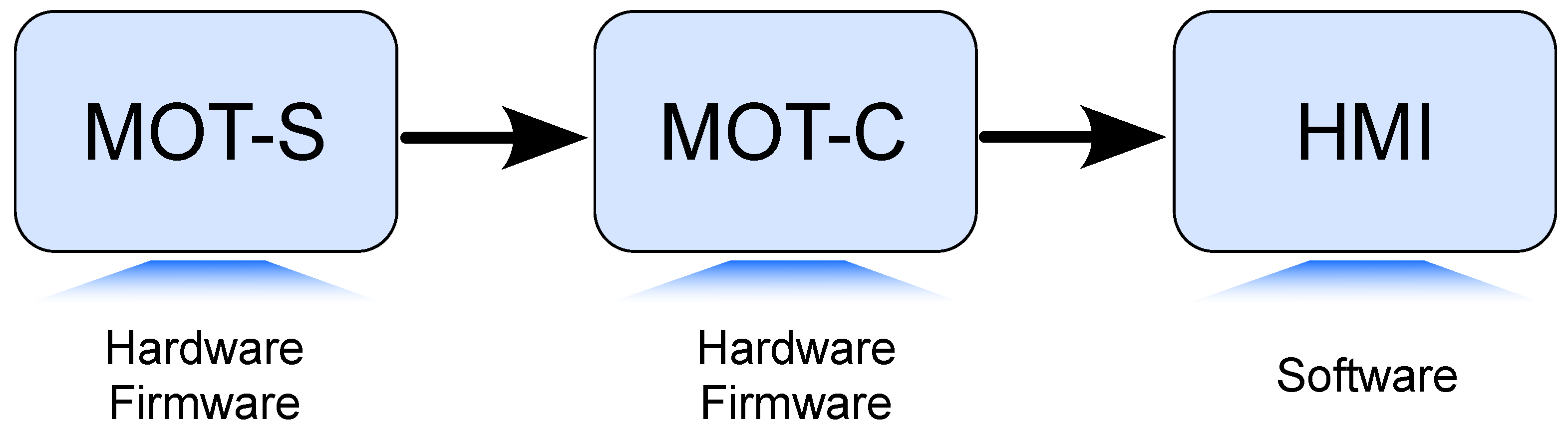
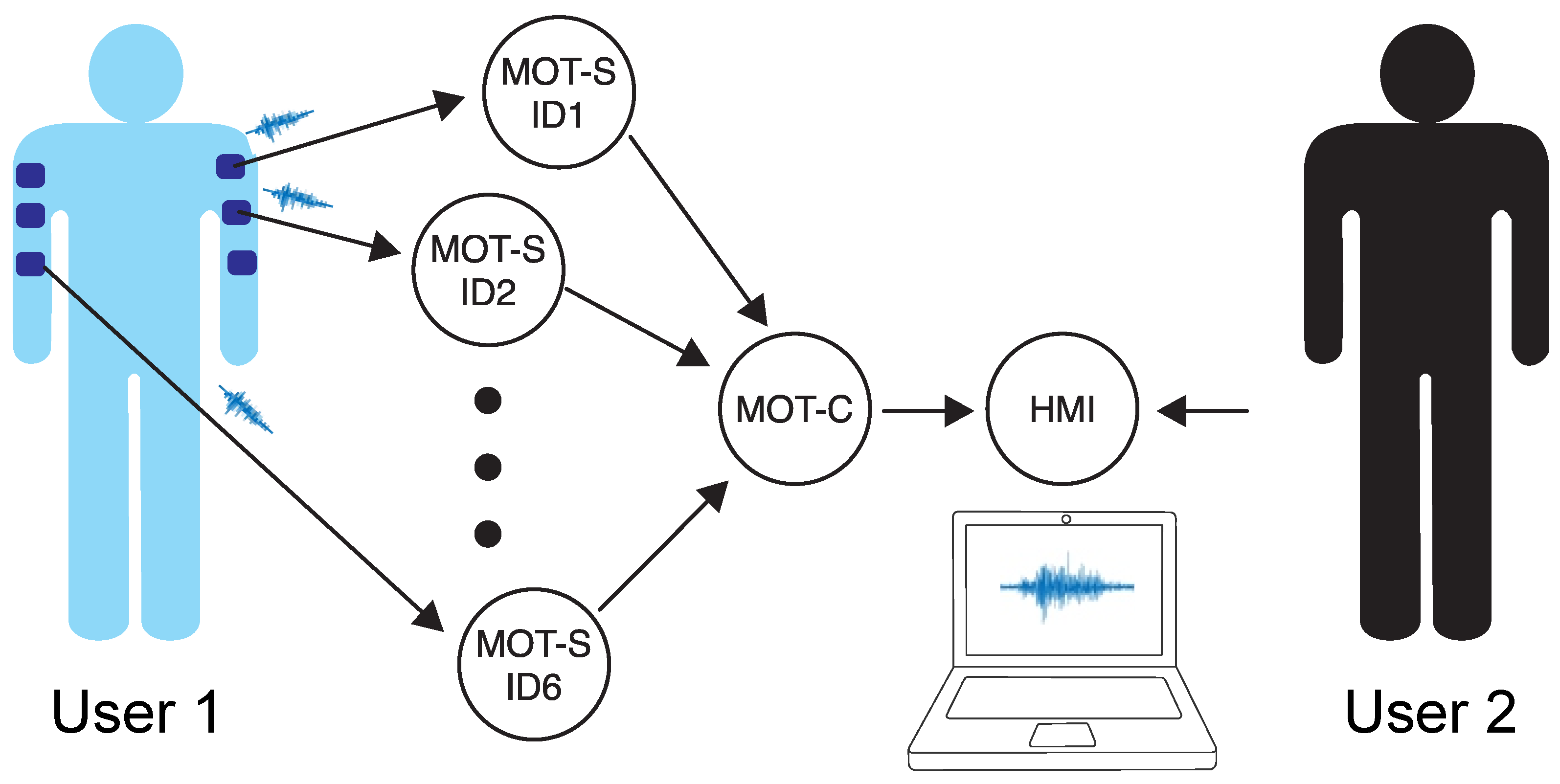
3.1. System Overview
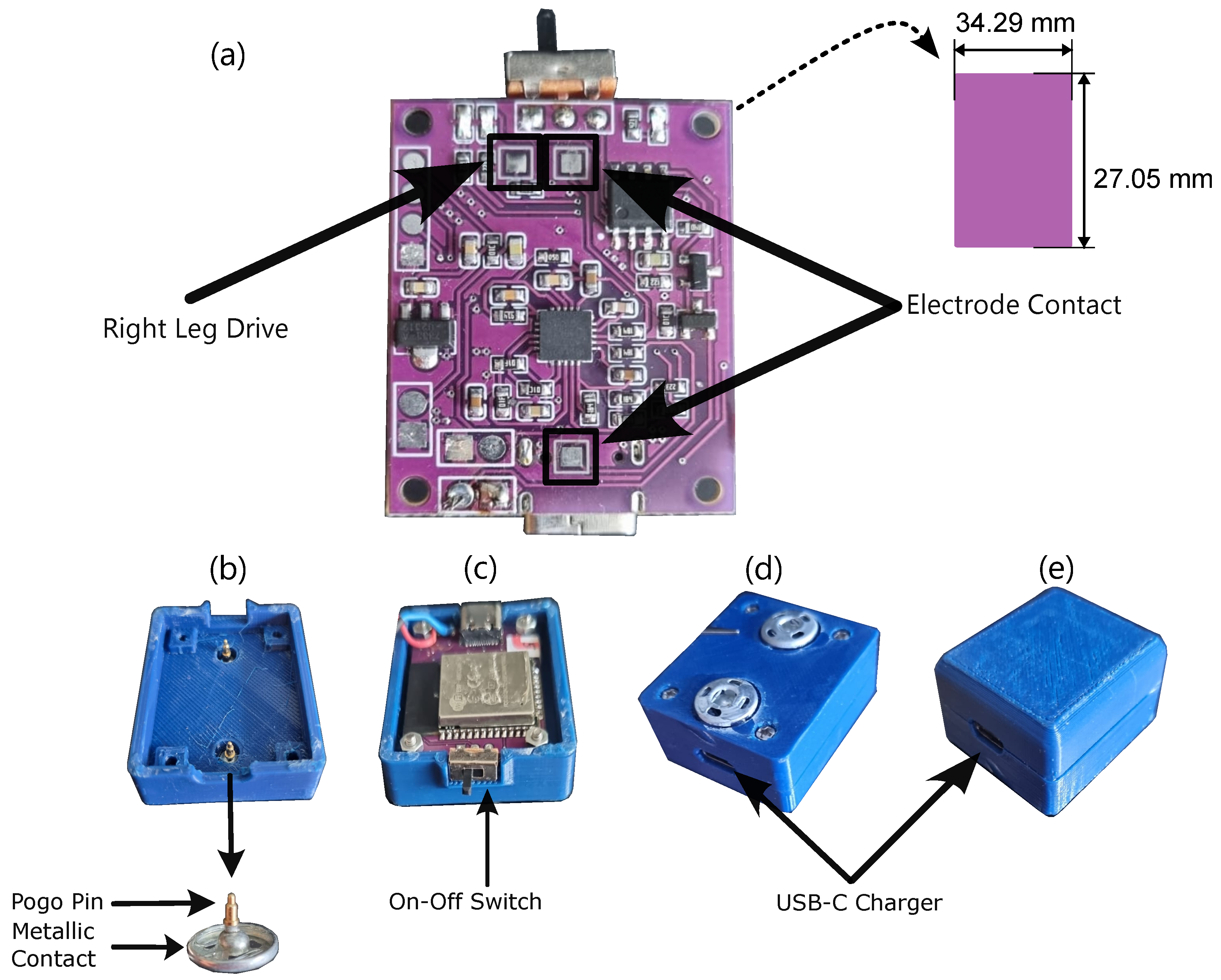
3.2. Sensor Module: MOT-S
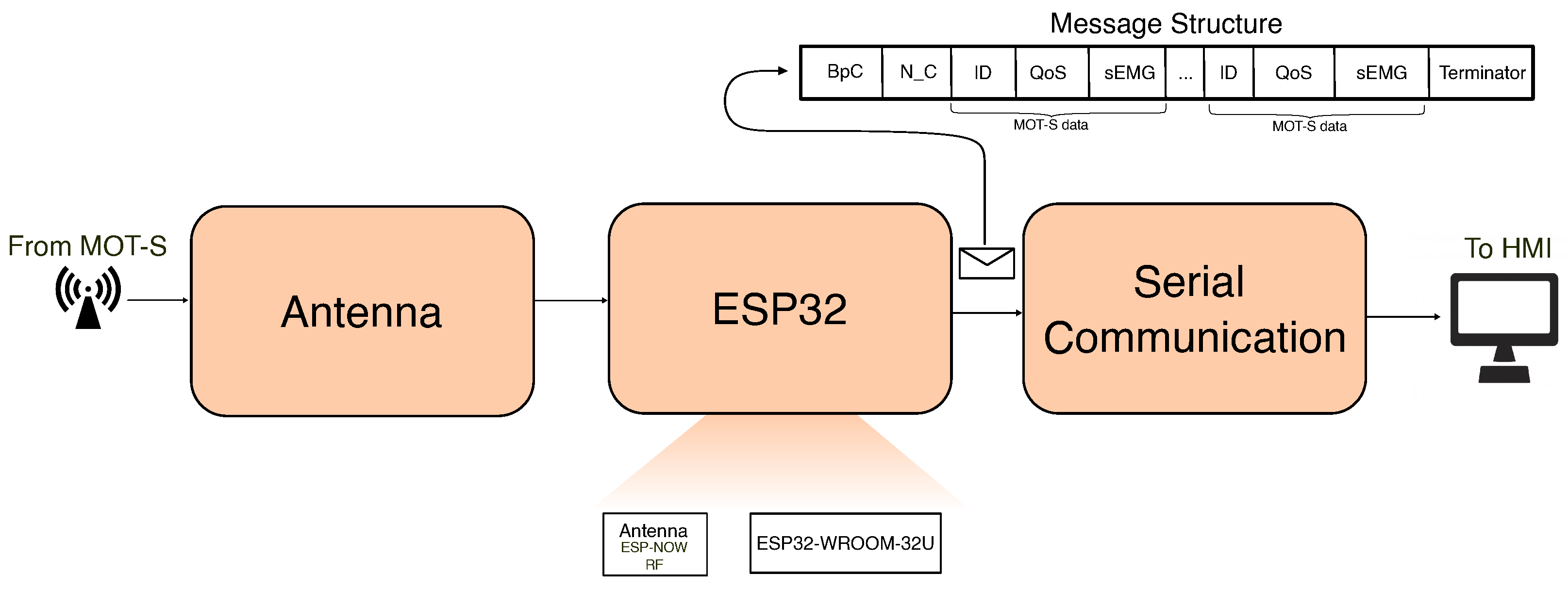
3.3. Central Module: MOT-C
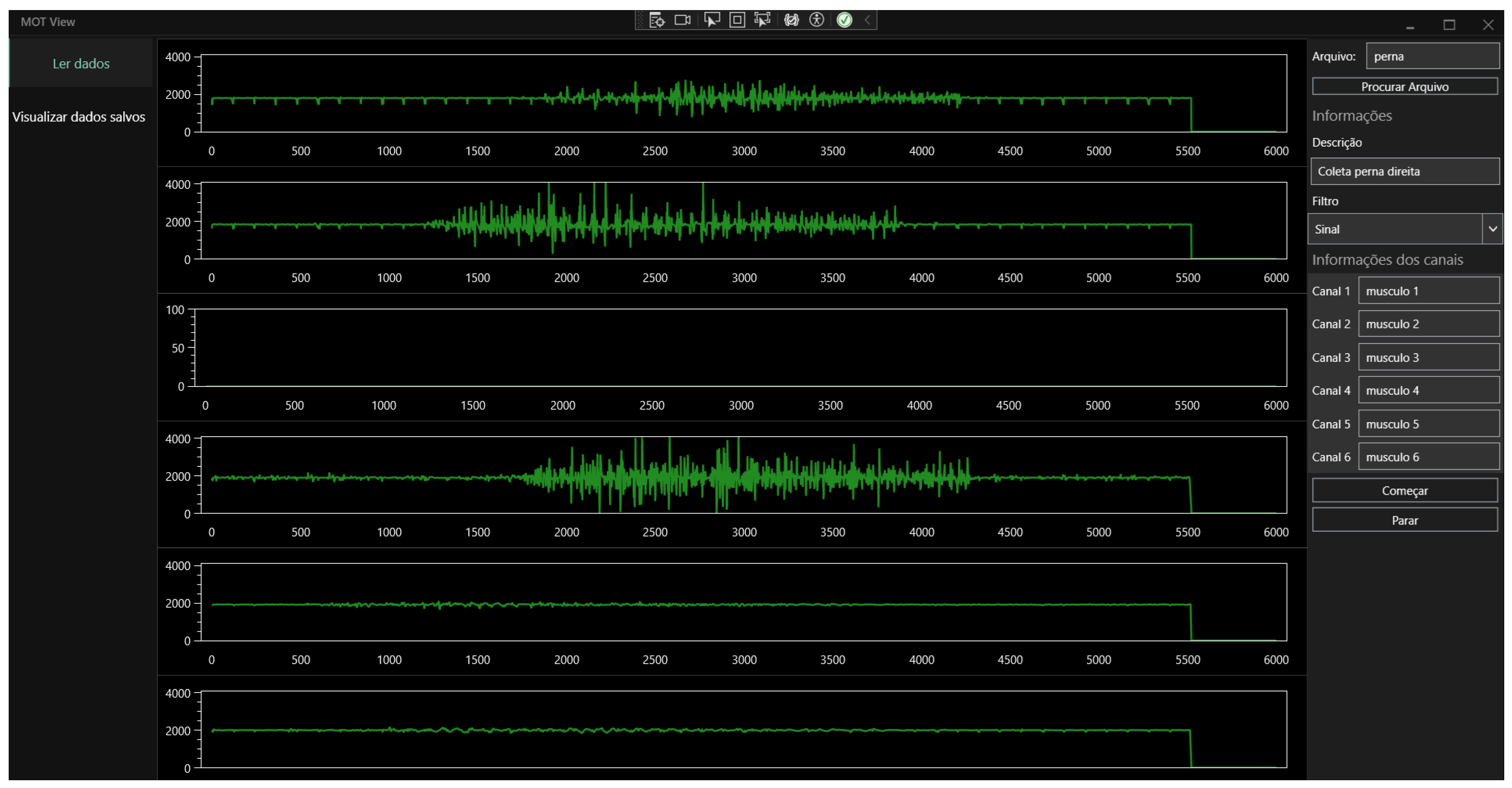
3.4. Interface
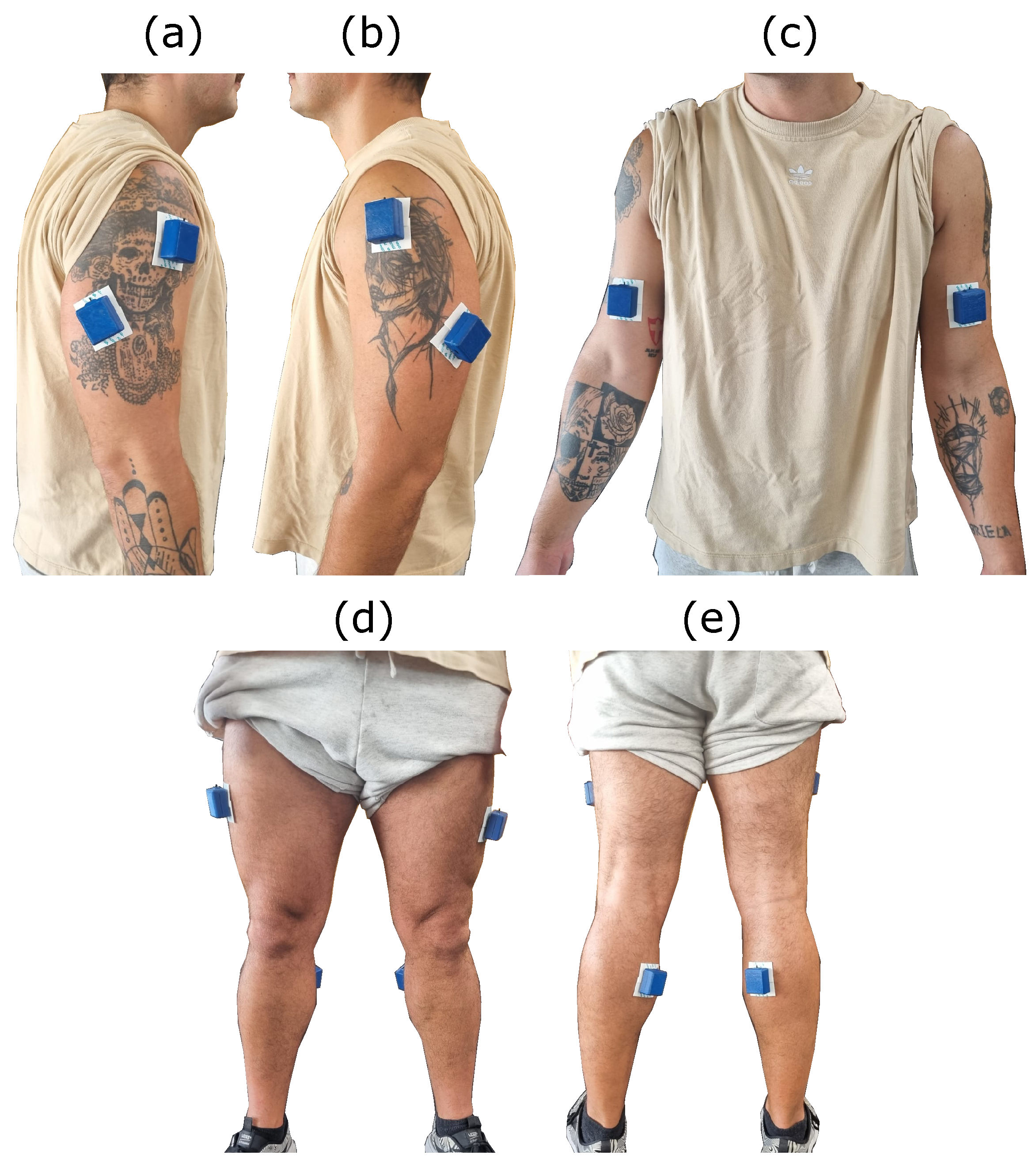
3.5. Experimental Methodology
4. Results and Discussion
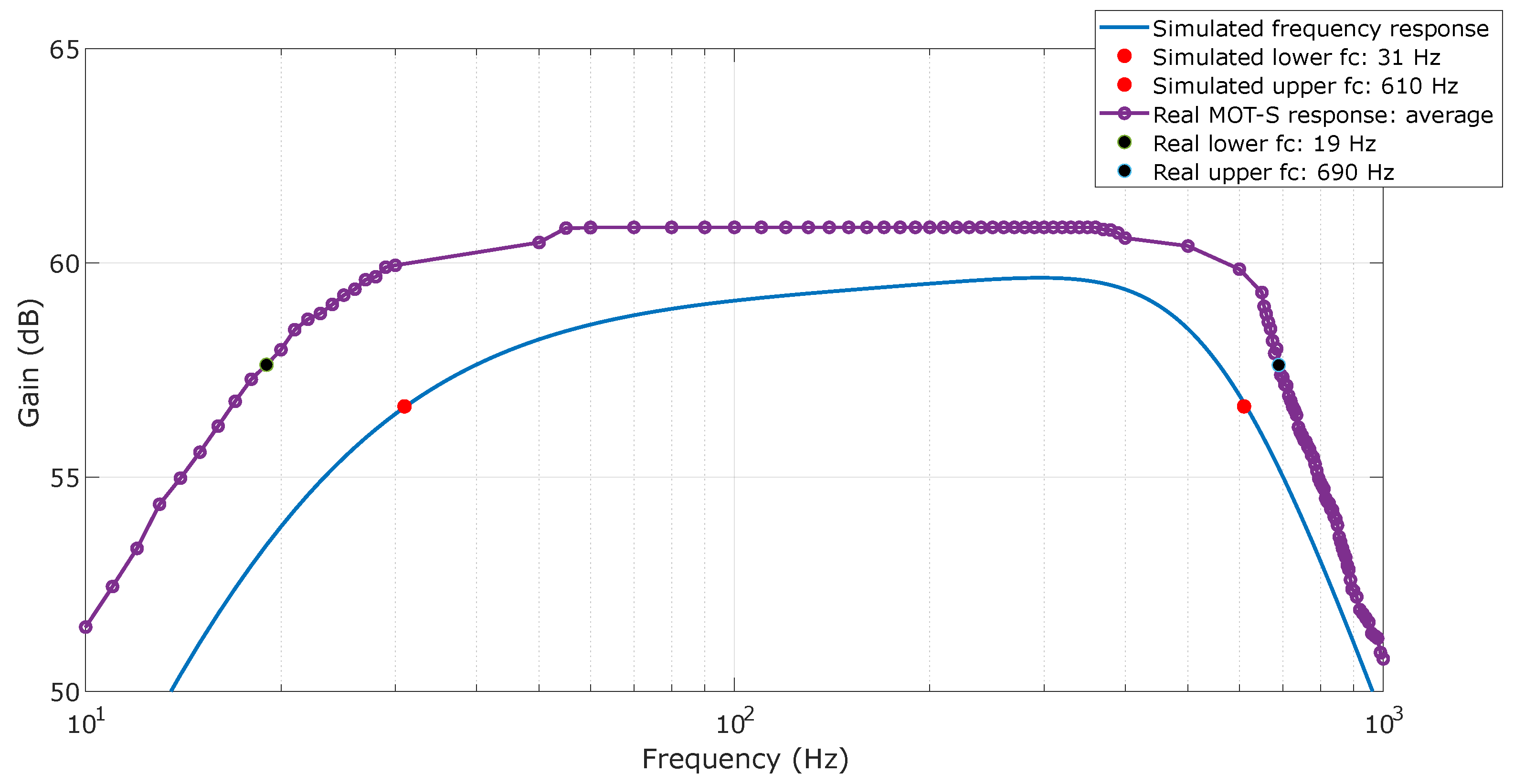
4.1. Frequency Response
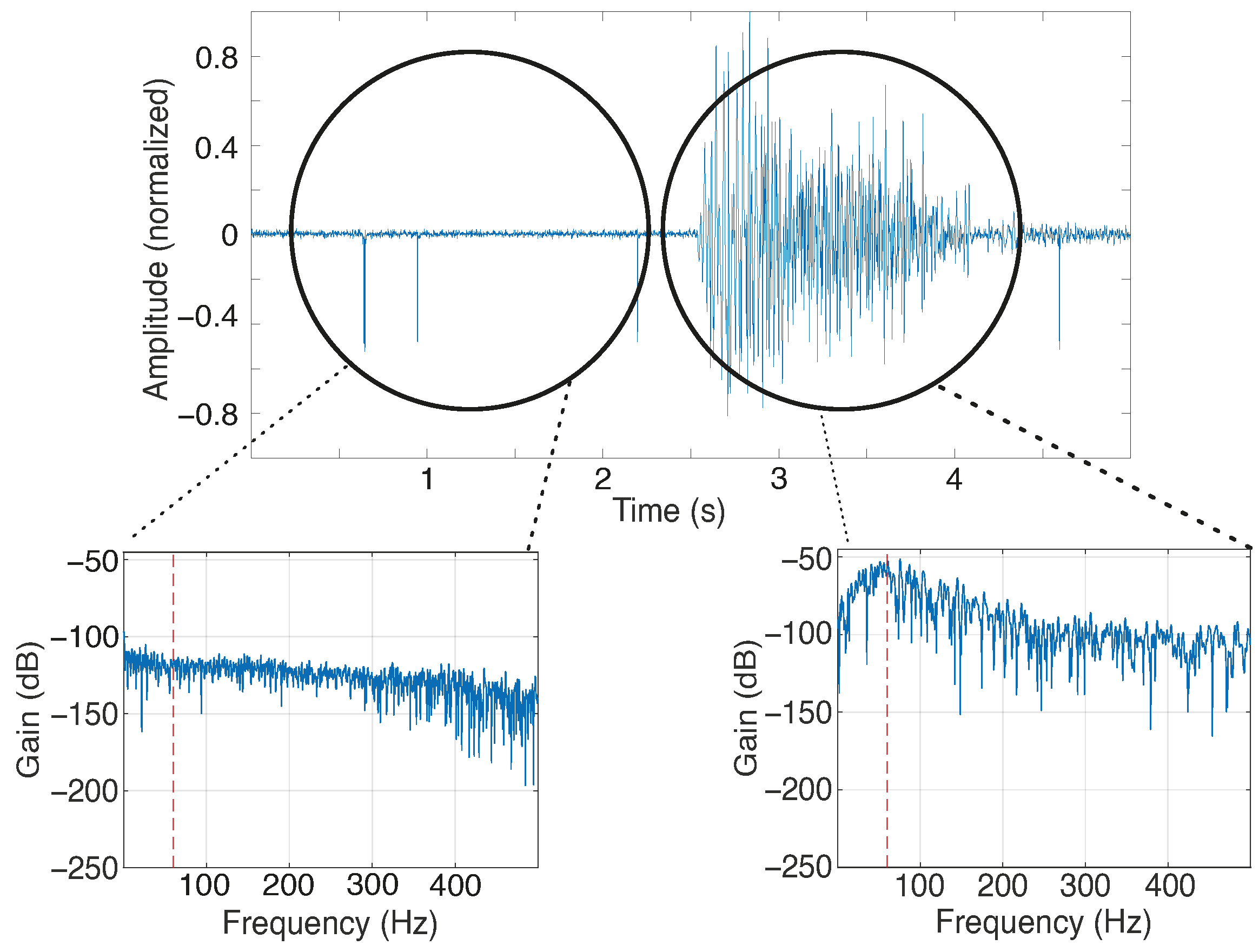
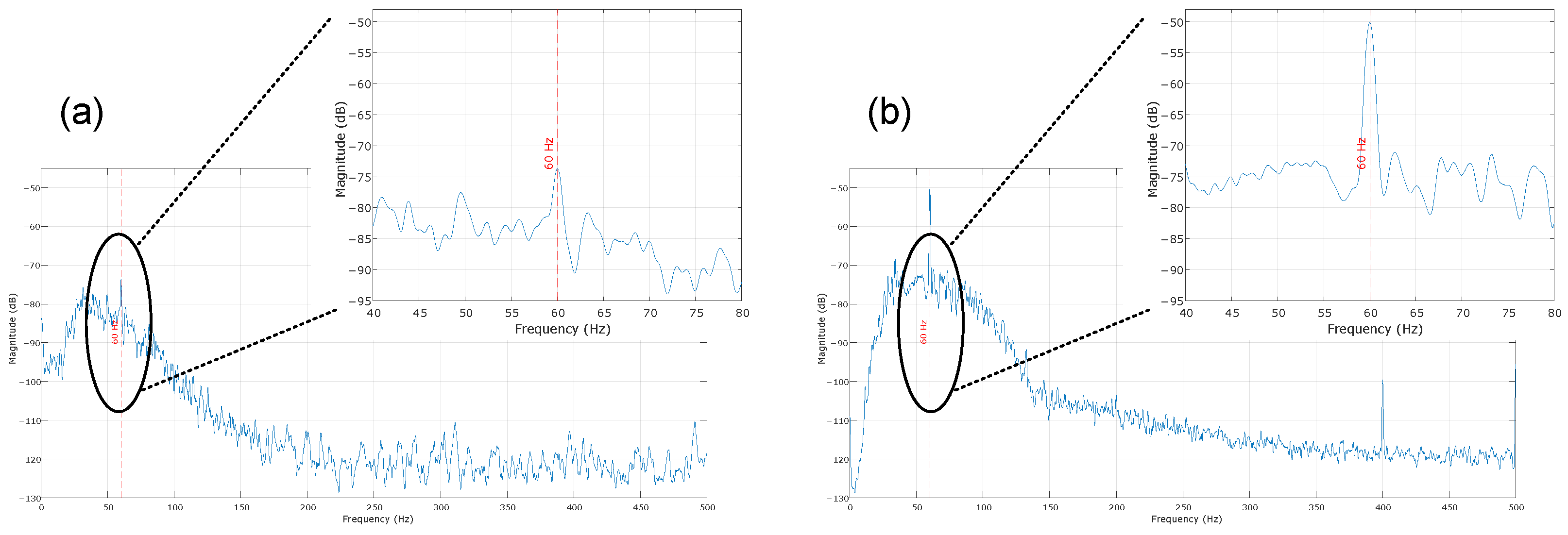
4.2. Electromagnetic Interference
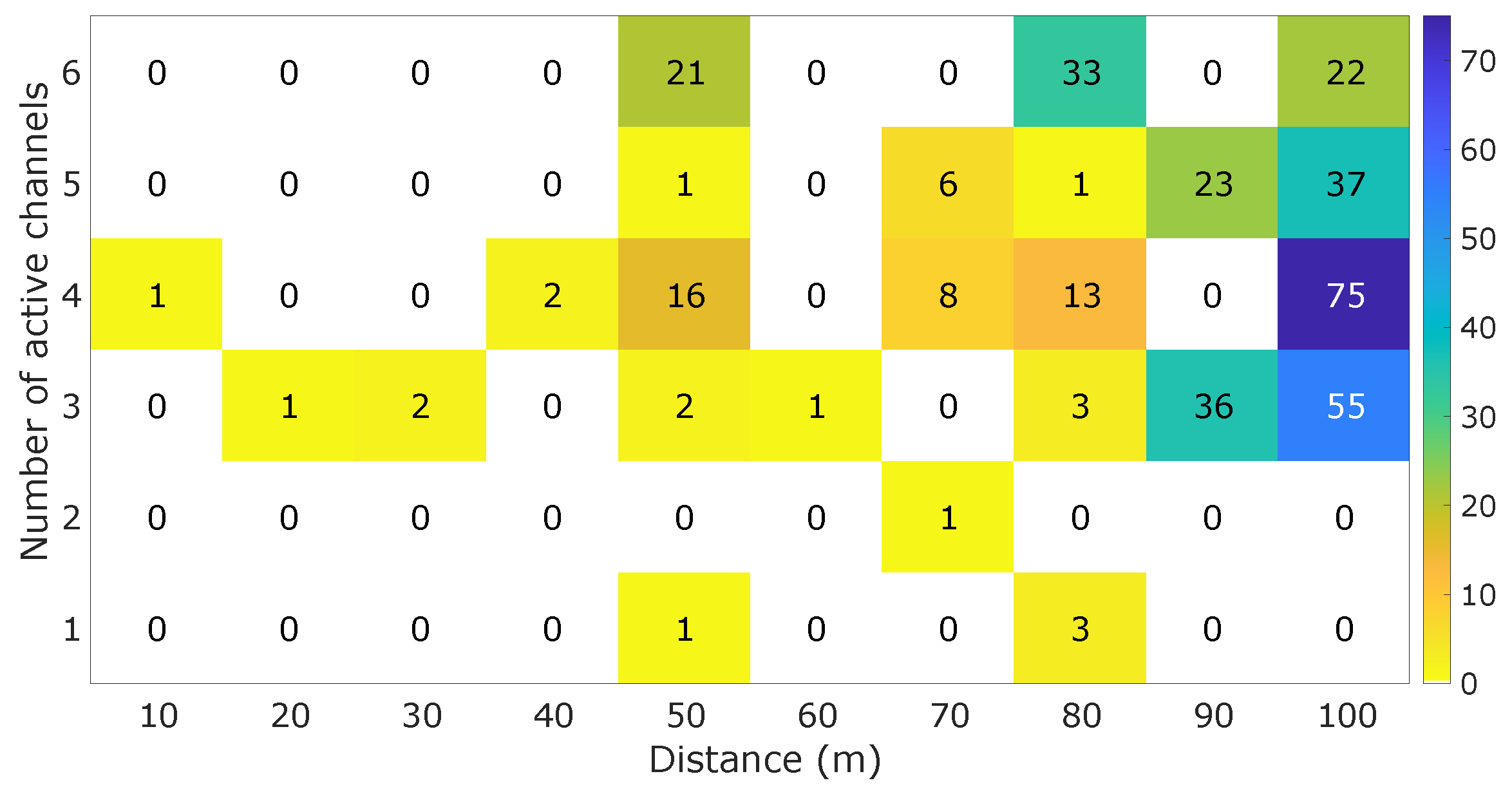
4.3. Data Transmission and Latency
4.4. Power Consumption
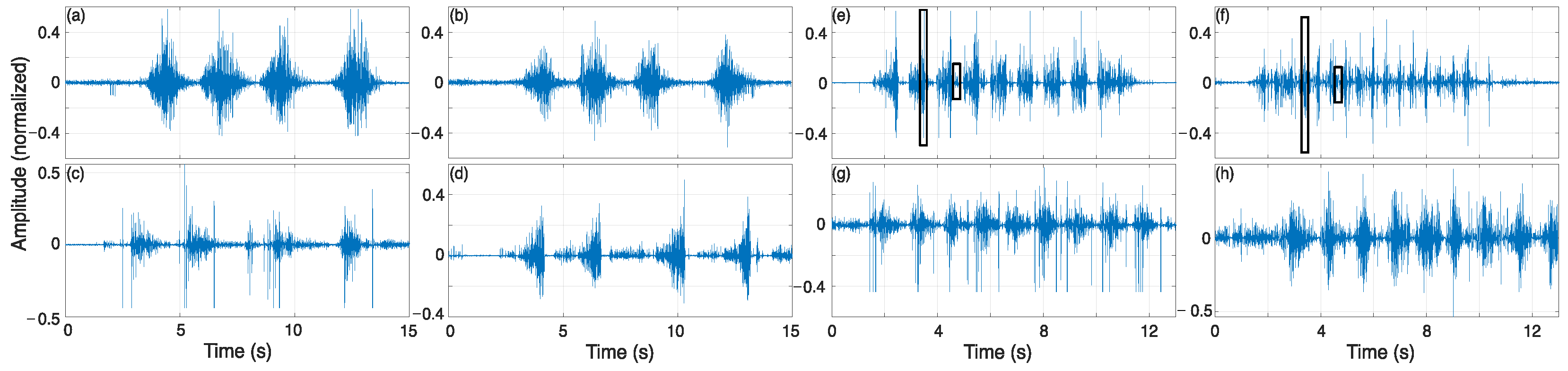
4.5. Comparison with Bitalino
4.6. Practical Application
4.7. Comparison with Literature and Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hess, C.; Pullman, S. Tremor: Clinical Phenomenology and Assessment Techniques. Tremor Other Hyperkinetic Movements 2012, 2, tre-02-65-365-1. [Google Scholar] [CrossRef] [PubMed]
- Ortolan, R.L. Estudo e Avaliação de Técnicas de Processamento do Sinal Mioelétrico para o Controle de Sistemas de Reabilitação. Master’s Thesis, Library of Thesis and Dissertation of USP, São Carlos, Brazil, 2002. [Google Scholar]
- Portelli, A.J.; Nasuto, S.J. Design and Development of Non-Contact Bio-Potential Electrodes for Pervasive Health Monitoring Applications. Biosensors 2017, 7, 2. [Google Scholar] [CrossRef] [PubMed]
- Al-Ayyad, M.; Owida, H.A.; De Fazio, R.; Al-Naami, B.; Visconti, P. Electromyography monitoring systems in rehabilitation: A review of clinical applications, wearable devices and signal acquisition methodologies. Electronics 2023, 12, 1520. [Google Scholar] [CrossRef]
- Hakonen, M.; Piitulainen, H.; Visala, A. Current state of digital signal processing in myoelectric interfaces and related applications. Biomed. Signal Process. Control 2015, 18, 334–359. [Google Scholar] [CrossRef]
- Criswell, E. Cram’s Introduction to Surface Electromyography; Jones & Bartlett Learning: Sudbury, MA, USA, 2010. [Google Scholar]
- Marcos-Antón, S.; Jardón-Huete, A.; Oña-Simbaña, E.D.; Blázquez-Fernández, A.; Martínez-Rolando, L.; Cano-de-la Cuerda, R. sEMG-controlled forearm bracelet and serious game-based rehabilitation for training manual dexterity in people with multiple sclerosis: A randomised controlled trial. J. Neuroeng. Rehabil. 2023, 20, 110. [Google Scholar] [CrossRef]
- Kadavath, M.R.K.; Nasor, M.; Imran, A. Enhanced Hand Gesture Recognition with Surface Electromyogram and Machine Learning. Sensors 2024, 24, 5231. [Google Scholar] [CrossRef]
- Hu, F.; Qian, M.; He, K.; Zhang, W.A.; Yang, X. A Novel Multi-Feature Fusion Network With Spatial Partitioning Strategy and Cross-Attention for Armband-Based Gesture Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 3878–3890. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Rocamora, A.; Martinez-Martin, E.; Costa, A. A low-cost AR application to control arm prosthesis. Virtual Real. 2023, 27, 3469–3483. [Google Scholar] [CrossRef]
- Yakob, M.Y.b.; Baharuddin, M.Z.b.; Khairudin, A.R.M.; Karim, M.H.B.A. Telecontrol of Prosthetic Robot Hand Using Myo Armband. In Proceedings of the 2021 IEEE International Conference on Automatic Control & Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 26 June 2021; pp. 288–293. [Google Scholar] [CrossRef]
- Li, G.; Geng, Y.; Tao, D.; Zhou, P. Performance of electromyography recorded using textile electrodes in classifying arm movements. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 4243–4246. [Google Scholar]
- Ben Haj Amor, A.; El Ghoul, O.; Jemni, M. An EMG dataset for Arabic sign language alphabet letters and numbers. Data Brief 2023, 51, 109770. [Google Scholar] [CrossRef]
- Tateno, S.; Liu, H.; Ou, J. Development of Sign Language Motion Recognition System for Hearing-Impaired People Using Electromyography Signal. Sensors 2020, 20, 5807. [Google Scholar] [CrossRef]
- Ben Haj Amor, A.; El Ghoul, O.; Jemni, M. Sign Language Recognition Using the Electromyographic Signal: A Systematic Literature Review. Sensors 2023, 23, 8343. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Long, Y.; Yan, Y.; Xiao, K.; Wang, Z.; Zheng, D.; Leal-Junior, A.; Kumar, S.; Ortega, B.; Marques, C.; et al. Wearable photonic smart wristband for cardiorespiratory function assessment and biometric identification. Opto-Electron. Adv. 2025, 8, 240254. [Google Scholar] [CrossRef]
- Anam, K.; Ismail, H.; Hanggara, F.S.; Avian, C.; Nahela, S.; Sasono, M.A.H. Feature Extraction Evaluation of Various Machine Learning Methods for Finger Movement Classification using Double Myo Armband. J. Eng. Technol. Sci. 2023, 55, 587–599. [Google Scholar] [CrossRef]
- Oymotion. Oymotion gForcePro+EMG Armband; Technical Report; Oymotion: Xiamen, China, 2024. [Google Scholar]
- Meattini, R. A Myo-Controlled Wearable Manipulation System with Tactile Sensing for Prosthetics Studies. Ph.D. Thesis, Alma Mater Studiorum-UniversitÀ DI Bologna, Bologna, Italy, 2021. [Google Scholar]
- Remon, F.J.G.; Espinosa, L.E.B.; Reyes, D.M.S.; Aguinaga, C.A.P.; Shishco, S.G.M.; Bocanegra, C.A.S. Characterization and differentiation of electromyographic signals acquired with the BITalino platform in Peruvian university students. In Proceedings of the 2023 IEEE XXX International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 2–4 November 2023; pp. 1–7. [Google Scholar]
- Lim, J.; Sun, M.; Liu, J.Z.; Tan, Y. A Preliminary Usability Study of Integrated Electronic Tattoo Surface Electromyography (sEMG) Sensors. In Proceedings of the 2023 45th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Sydney, Australia, 24–27 July 2023; pp. 1–4. [Google Scholar]
- Ruas, C.V.; Ratel, S.; Nosaka, K.; Castellano, G.; Pinto, R.S. Resistance training effects on pubertal children with a risk of developing pediatric dynapenia. Eur. J. Appl. Physiol. 2024, 124, 2123–2137. [Google Scholar] [CrossRef]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature Extraction and Selection for Myoelectric Control Based on Wearable EMG Sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef]
- Biagetti, G.; Crippa, P.; Falaschetti, L.; Turchetti, C. A multi-channel electromyography, electrocardiography and inertial wireless sensor module using Bluetooth low-energy. Electronics 2020, 9, 934. [Google Scholar] [CrossRef]
- Garouche, M.; Thamsuwan, O. Development of a low-cost portable EMG for measuring the muscular activity of workers in the field. Sensors 2023, 23, 7873. [Google Scholar] [CrossRef]
- Wang, J.; Tang, L.; Bronlund, J.E. Surface EMG signal amplification and filtering. Int. J. Comput. Appl. 2013, 82, 15–22. [Google Scholar] [CrossRef]
- Van Boxtel, A. Optimal signal bandwidth for the recording of surface EMG activity of facial, jaw, oral, and neck muscles. Psychophysiology 2001, 38, 22–34. [Google Scholar] [CrossRef]
- Chan, B.; Saad, I.; Bolong, N.; Kang, E.S. Design of Portable Electromyography (EMG) System for Clinical Rehabilitation. Trans. Sci. Technol. 2021, 8, 519–526. [Google Scholar]
- Kamen, G.; Gabriel, D. Fundamentos da Eletromiografia; Phorte Editora: São Paulo, Brazil, 2015. [Google Scholar]
- Reaz, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef] [PubMed]
- De Luca, C.J.; Gilmore, L.D.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef]
- Zhou, R.; Luo, Q.; Feng, X.; Li, C. Design of a wireless multi-channel surface EMG signal acquisition system. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 279–283. [Google Scholar]
- Boyer, M.; Bouyer, L.; Roy, J.S.; Campeau-Lecours, A. Reducing noise, artifacts and interference in single-channel emg signals: A review. Sensors 2023, 23, 2927. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.P.; Chen, H.C.; Sung, P.C. Wireless logger for biosignals. Int. J. Appl. Sci. Eng. 2010, 8, 27–37. [Google Scholar]
- Lee, S.; Yoon, J.; Lee, D.; Seong, D.; Lee, S.; Jang, M.; Choi, J.; Yu, K.J.; Kim, J.; Lee, S.; et al. Wireless epidermal electromyogram sensing system. Electronics 2020, 9, 269. [Google Scholar] [CrossRef]
- Wu, Y.D.; Ruan, S.J.; Lee, Y.H. An ultra-low power surface EMG sensor for wearable biometric and medical applications. Biosensors 2021, 11, 411. [Google Scholar] [CrossRef]
- Mazzetta, I.; Gentile, P.; Pessione, M.; Suppa, A.; Zampogna, A.; Bianchini, E.; Irrera, F. Stand-alone wearable system for ubiquitous real-time monitoring of muscle activation potentials. Sensors 2018, 18, 1748. [Google Scholar] [CrossRef]
- Piccinini, D.; Andino, N.; Ponce, S.; Roberti, M. Wearable system for acquisition and monitoring of biological signals. J. Phys. Conf. Ser. 2016, 705, 012009. [Google Scholar] [CrossRef]
- Biagetti, G.; Crippa, P.; Falaschetti, L.; Orcioni, S.; Turchetti, C. Human activity monitoring system based on wearable sEMG and accelerometer wireless sensor nodes. Biomed. Eng. Online 2018, 17, 132. [Google Scholar] [CrossRef]
- Nakamura, H.; Sakajiri, Y.; Ishigami, H.; Ueno, A. A novel analog front end with voltage-dependent input impedance and bandpass amplification for capacitive biopotential measurements. Sensors 2020, 20, 2476. [Google Scholar] [CrossRef]
- Bhamra, H.; Kim, Y.J.; Joseph, J.; Lynch, J.; Gall, O.Z.; Mei, H.; Meng, C.; Tsai, J.W.; Irazoqui, P. A 24 µV, Batteryless, Crystal-free, Multinode Synchronized SoC “Bionode” for Wireless Prosthesis Control. IEEE J. Solid-State Circuits 2015, 50, 2714–2727. [Google Scholar] [CrossRef]
- Bhamra, H.; Lynch, J.; Ward, M.; Irazoqui, P. A noise-power-area optimized biosensing front end for wireless body sensor nodes and medical implantable devices. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2017, 25, 2917–2928. [Google Scholar] [CrossRef]
- Imperatori, G.; Cunzolo, P.; Cvetkov, D.; Barrettino, D. Wireless surface electromyography probes with four high-speed channels. IEEE Sens. J. 2013, 13, 2954–2961. [Google Scholar] [CrossRef]
- Lee, H.; Kim, K.; Oh, S.R. Development of a wearable and dry sEMG electrode system for decoding of human hand configurations. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 746–750. [Google Scholar]
- Zhao, S.; Liu, J.; Gong, Z.; Lei, Y.; OuYang, X.; Chan, C.C.; Ruan, S. Wearable physiological monitoring system based on electrocardiography and electromyography for upper limb rehabilitation training. Sensors 2020, 20, 4861. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, C. Design of EMG and FMG multi-sensing acquisition system for lip muscle training. In Proceedings of the 2022 International Conference on Artificial Intelligence, Information Processing and Cloud Computing (AIIPCC), Kunming, China, 19–21 August 2022; pp. 174–177. [Google Scholar]
- Sarker, V.K.; Jiang, M.; Gia, T.N.; Anzanpour, A.; Rahmani, A.M.; Liljeberg, P. Portable multipurpose bio-signal acquisition and wireless streaming device for wearables. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Chang, H.; Cao, R.; Pan, X.; Sheng, Y.; Wang, Z.; Liu, H. A Wearable Multi-Channel EEG/EMG Sensor System for Corticomuscular Coupling Analysis. IEEE Sens. J. 2023, 23, 27931–27940. [Google Scholar] [CrossRef]
- Delsys. Trigno Centro; Technical report; Delsys: Natick, MA, USA, 2024. [Google Scholar]
- Delsys. Trigno® Link Communication Module User’s Guide; Technical report; Delsys: Natick, MA, USA, 2024. [Google Scholar]
- Biometrics. EMG Sensors; Technical report; Biometrics Ltd.: Newport, UK, 2024. [Google Scholar]
- BTS Bioengineering. Trigno Centro; Technical report; BTS Bioengineering: Garbagnate Milanese, Italy, 2024. [Google Scholar]
- Wireshark. IEEE 802.15.4; Technical report. 2024. Available online: https://wiki.wireshark.org/IEEE_802.15.4 (accessed on 20 December 2024).
- Tang, X.; Liu, Y.; Lv, C.; Sun, D. Hand motion classification using a multi-channel surface electromyography sensor. Sensors 2012, 12, 1130–1147. [Google Scholar] [CrossRef]
- Fang, Y.; Zhu, X.; Liu, H. Development of a surface emg acquisition system with novel electrodes configuration and signal representation. In Proceedings of the Intelligent Robotics and Applications: 6th International Conference, ICIRA 2013, Busan, Republic of Korea, 25–28 September 2013; Proceedings, Part I 6. Springer: Berlin/Heidelberg, Germany, 2013; pp. 405–414. [Google Scholar]
- Li, X.; Sun, Y. NCMB-button: A wearable non-contact system for long-term multiple biopotential monitoring. In Proceedings of the 2017 IEEE/ACM International Conference on Connected Health: Applications, Systems and Engineering Technologies (CHASE), Philadelphia, PA, USA, 17–19 July 2017; pp. 348–355. [Google Scholar]
- Vergaray, R.A.; Del Aguila, R.F.; Avellaneda, G.A.; Palomares, R.; Cornejo, J.; Cornejo-Aguilar, J.A. Mechatronic System Design and Development of iROD: EMG Controlled Bionic Prosthesis for Middle- Third Forearm Amputee. In Proceedings of the 2021 IEEE Fifth Ecuador Technical Chapters Meeting (ETCM), Cuenca, Ecuador, 12–15 October 2021; pp. 1–5. [Google Scholar]
- Ergeneci, M.; Gokcesu, K.; Ertan, E.; Kosmas, P. An embedded, eight channel, noise canceling, wireless, wearable sEMG data acquisition system with adaptive muscle contraction detection. IEEE Trans. Biomed. Circuits Syst. 2017, 12, 68–79. [Google Scholar] [CrossRef]
- Kausar, N.; Belhaouari Samir, B.; Abdullah, A.; Ahmad, I.; Hussain, M. A review of classification approaches using support vector machine in intrusion detection. In Proceedings of the Informatics Engineering and Information Science: International Conference, ICIEIS 2011, Kuala Lumpur, Malaysia, 14–16 November 2011; Proceedings, Part III. Springer: Berlin/Heidelberg, Germany, 2011; pp. 24–34. [Google Scholar]
- Pluxbiosignals. BITalino (r)evolution MuscleBIT Bundle Data Sheet; Technical report; Pluxbiosignals: Lisbon, Portugal, 2024. [Google Scholar]
- González Méndez, M.V. Avaliação de um Sistema de Neuro-órtese sEMG-FES: Um Estudo de caso em Pacientes Neurológicos. Master’s Thesis, Universidade Tecnológica Federal do Paraná, Curitiba, Paraná, Brazil, 2024. [Google Scholar]
- Zhang, Y.; Li, X.; Wang, Y.; Chen, J.; Liu, H. Skin-Integrated, Biocompatible, and Stretchable Silicon Microneedle Arrays for High-Fidelity Electromyography. Nat. Commun. 2023, 14, 279. [Google Scholar] [CrossRef]
- Mendes Junior, J.J.A.; Campos, D.P.; Biassio, L.C.d.A.V.D.; Passos, P.C.; Júnior, P.B.; Lazzaretti, A.E.; Krueger, E. AD8232 to biopotentials sensors: Open source project and benchmark. Electronics 2023, 12, 833. [Google Scholar] [CrossRef]
- Analog Devices. Single-Lead, Heart Rate Monitor Front End AD8232; Technical report; Analog Devices: Wilmington, MA, USA, 2020. [Google Scholar]
- Analog Devices, Inc. AD8232: Single-Lead, Heart Rate Monitor Front End—Data Sheet; Analog Devices: Norwood, MA, USA, 2013. [Google Scholar]
- Espressif Systems. ESP32 Series—Technical Reference Manual, version 4.6; Espressif Systems (Shanghai) Co., Ltd.: Shanghai, China, 2022. [Google Scholar]
- Eridani, D.; Rochim, A.F.; Cesara, F.N. Comparative performance study of ESP-NOW, Wi-Fi, bluetooth protocols based on range, transmission speed, latency, energy usage and barrier resistance. In Proceedings of the 2021 International Seminar on Application for Technology of Information and Communication (iSemantic), Semarangin, Indonesia, 18–19 September 2021; pp. 322–328. [Google Scholar]
- ESPRESSIF. ESP32 Series Datasheet Version 4.7; Technical report; ESPRESSIF: Shanghai, China, 2024. [Google Scholar]
- Guangzhou HC Information Technology. Product Data Sheet; Technical report; Guangzhou HC Information Technology: Guangzhou, China, 2011. [Google Scholar]
- Clancy, E.A.; Morin, E.L.; Merletti, R. Sampling, noise-reduction and amplitude estimation issues in surface electromyography. J. Electromyogr. Kinesiol. 2002, 12, 1–16. [Google Scholar] [CrossRef]






| Movement | Action | Channels and Muscles | Repetitions |
|---|---|---|---|
| Squat | Execute squat with body weight and hip passing the knees | CH1: Right Vastus Lateralis CH2: Left Vastus Lateralis CH3: Right Gastrocnemius CH4: Left Gastrocnemius | 3 series of 8 repetitions |
| Vertical Jump | Vertical jump with emphasis on impact | CH1: Right Vastus Lateralis CH2: Left Vastus Lateralis CH3: Right Gastrocnemius CH4: Left Gastrocnemius | 3 series of 8 repetitions |
| Lunge | Alternate leg lunge with emphasis on muscle stability | CH1: Right Vastus Lateralis CH2: Left Vastus Lateralis CH3: Right Gastrocnemius CH4: Left Gastrocnemius | 3 series of 8 repetitions |
| Dumbbell Lateral Raise | Raise the dumbbell with 20% of volunteer’s maximum load | CH1: Right Deltoid Medial CH2: Left Deltoid Medial CH3: Right Triceps Brachii CH4: Left Triceps Brachii | 3 series of 4 repetitions |
| Triceps Push down with band | Push down with a band with focus on triceps movement | CH1: Right Deltoid Medial CH2: Left Deltoid Medial CH3: Right Triceps Brachii CH4: Left Triceps Brachii | 3 series of 4 repetitions |
| Dumbbell Biceps Curl | Biceps curl with dumbbell at 20% of volunteer’s maximum load | CH1: Right Deltoid Medial CH2: Left Deltoid Medial CH3: Right Biceps Brachii CH4: Left Biceps Brachii | Maximum of voluntary repetitions |
| Volunteer | Magnitude (dB) MOT | Magnitude (dB) Bitalino |
|---|---|---|
| 1 | −73.60 | −50.24 |
| 2 | −78.23 | −57.37 |
| 3 | −92.64 | −66.48 |
| 4 | −82.49 | −54.94 |
| 5 | −75.75 | −42.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inafuco, A.T.P.; Machoski, P.; Campos, D.P.; Pichorim, S.F.; Mendes Junior, J.J.A. MOT: A Low-Latency, Multichannel Wireless Surface Electromyography Acquisition System Based on the AD8232 Front-End. Sensors 2025, 25, 3600. https://doi.org/10.3390/s25123600
Inafuco ATP, Machoski P, Campos DP, Pichorim SF, Mendes Junior JJA. MOT: A Low-Latency, Multichannel Wireless Surface Electromyography Acquisition System Based on the AD8232 Front-End. Sensors. 2025; 25(12):3600. https://doi.org/10.3390/s25123600
Chicago/Turabian StyleInafuco, Augusto Tetsuo Prado, Pablo Machoski, Daniel Prado Campos, Sergio Francisco Pichorim, and José Jair Alves Mendes Junior. 2025. "MOT: A Low-Latency, Multichannel Wireless Surface Electromyography Acquisition System Based on the AD8232 Front-End" Sensors 25, no. 12: 3600. https://doi.org/10.3390/s25123600
APA StyleInafuco, A. T. P., Machoski, P., Campos, D. P., Pichorim, S. F., & Mendes Junior, J. J. A. (2025). MOT: A Low-Latency, Multichannel Wireless Surface Electromyography Acquisition System Based on the AD8232 Front-End. Sensors, 25(12), 3600. https://doi.org/10.3390/s25123600