A Three-Dimensional Target Localization Method for Satellite–Ground Bistatic Radar Based on a Geometry–Motion Cooperative Constraint

Abstract
1. Introduction
- (1)
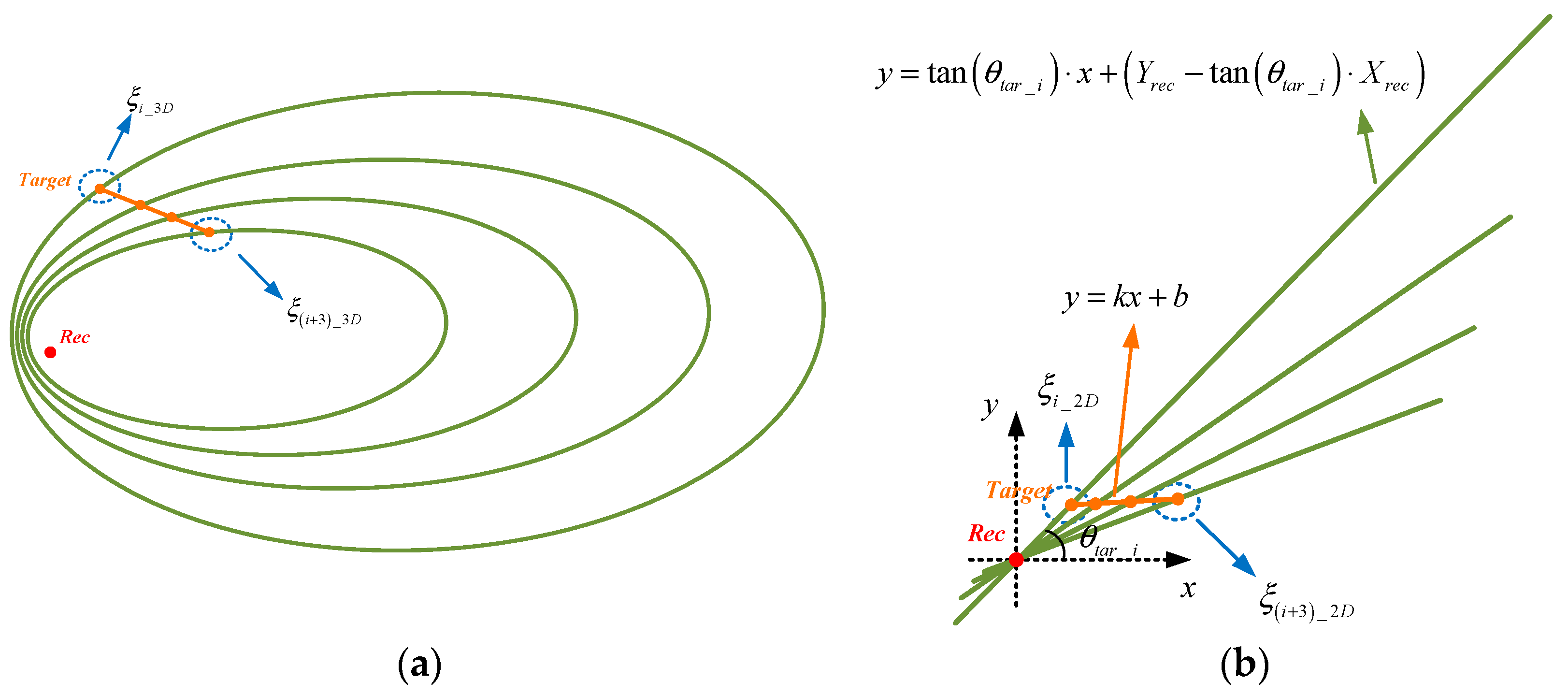
- The method of projecting the three-dimensional ellipse and the target motion trajectory onto a two-dimensional plane, while determining the trajectory slope through the construction of a cost function, circumvents the substantial computational complexity associated with three-dimensional solution searches. The framework of “reducing dimension–solving–increasing dimension” is quite uncommon in the positioning algorithms found in the current literature.
- (2)
- The integration of the intercept search mechanism of variable step-size segmentation and curvature criterion guarantees computational efficiency and accuracy, rendering it more applicable in engineering than iterative optimization methods.
2. Positioning Model
2.1. Position Ellipsoid Constraint
2.2. Position Ellipse Constraint
2.3. Assumption of Short-Term Linear Motion of the Target
2.3.1. Solution for the Slope k of Trajectory
2.3.2. Solution of the Intercept b of Trajectory
3. Results
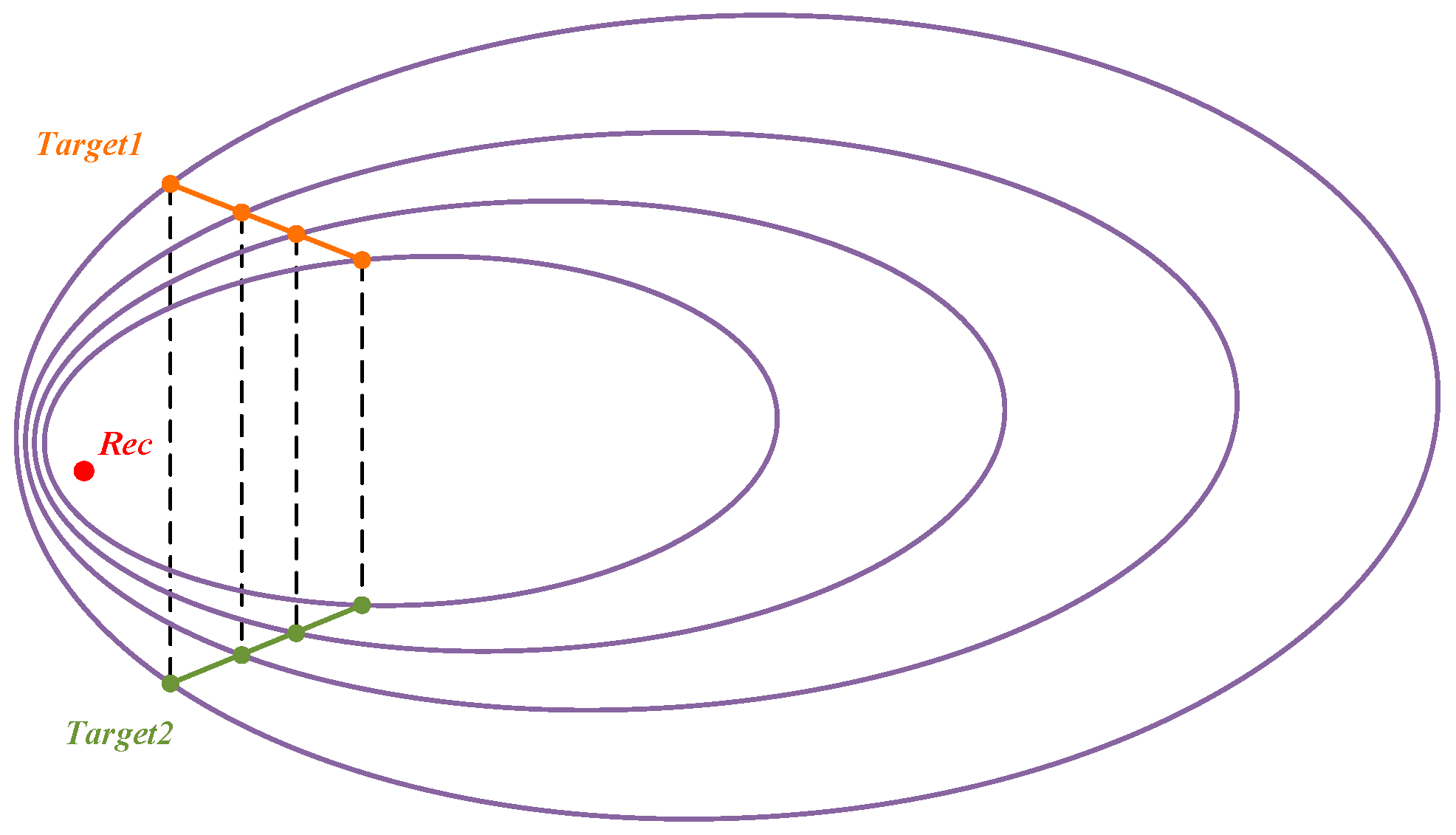
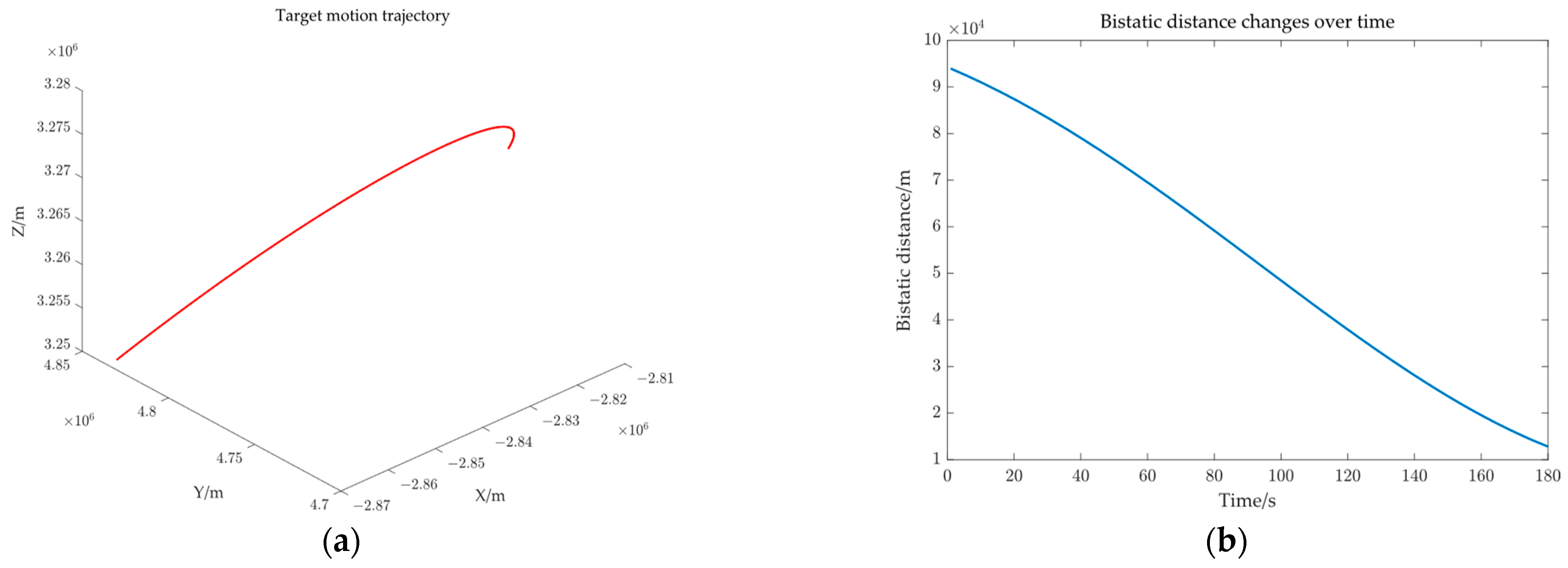
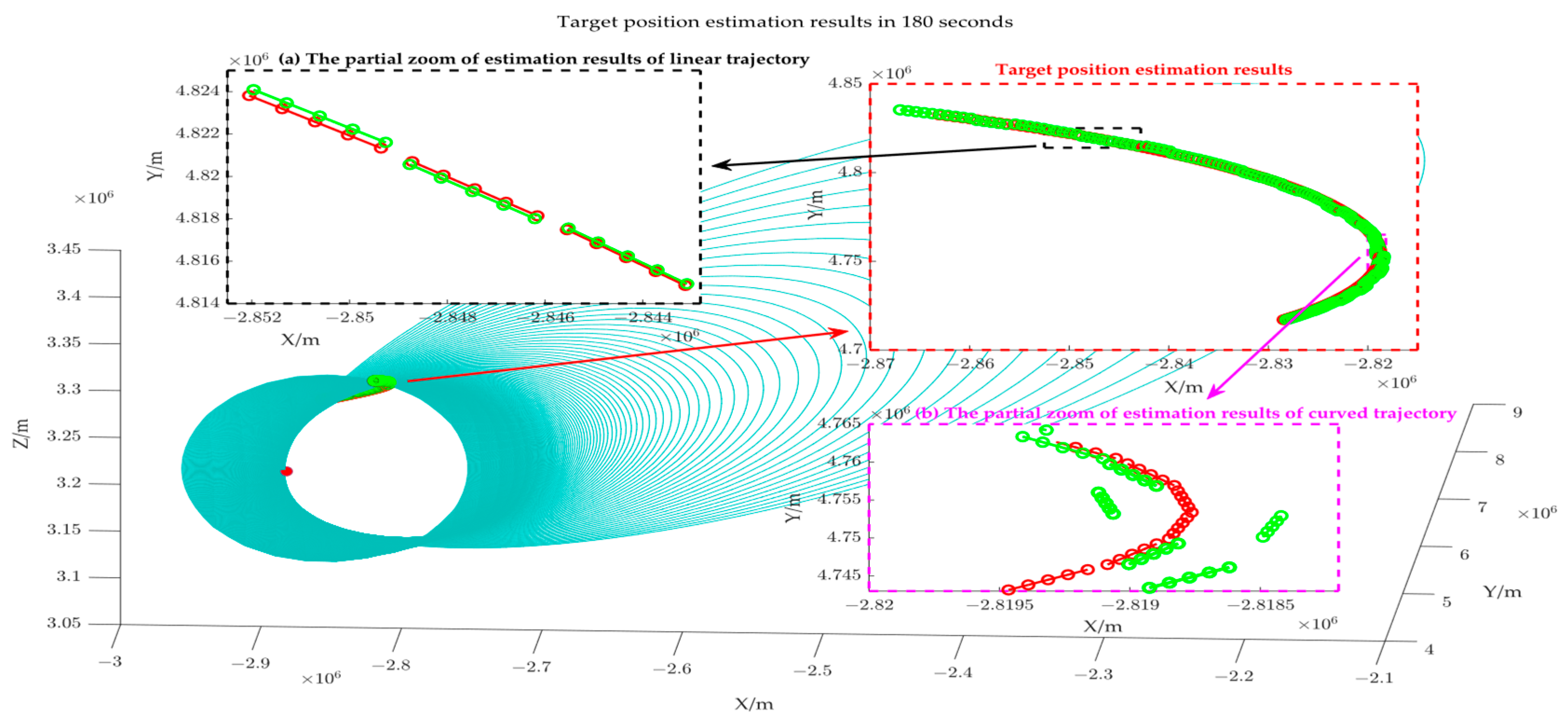
3.1. Explanation on the Assumption of Short-Term Linear Motion
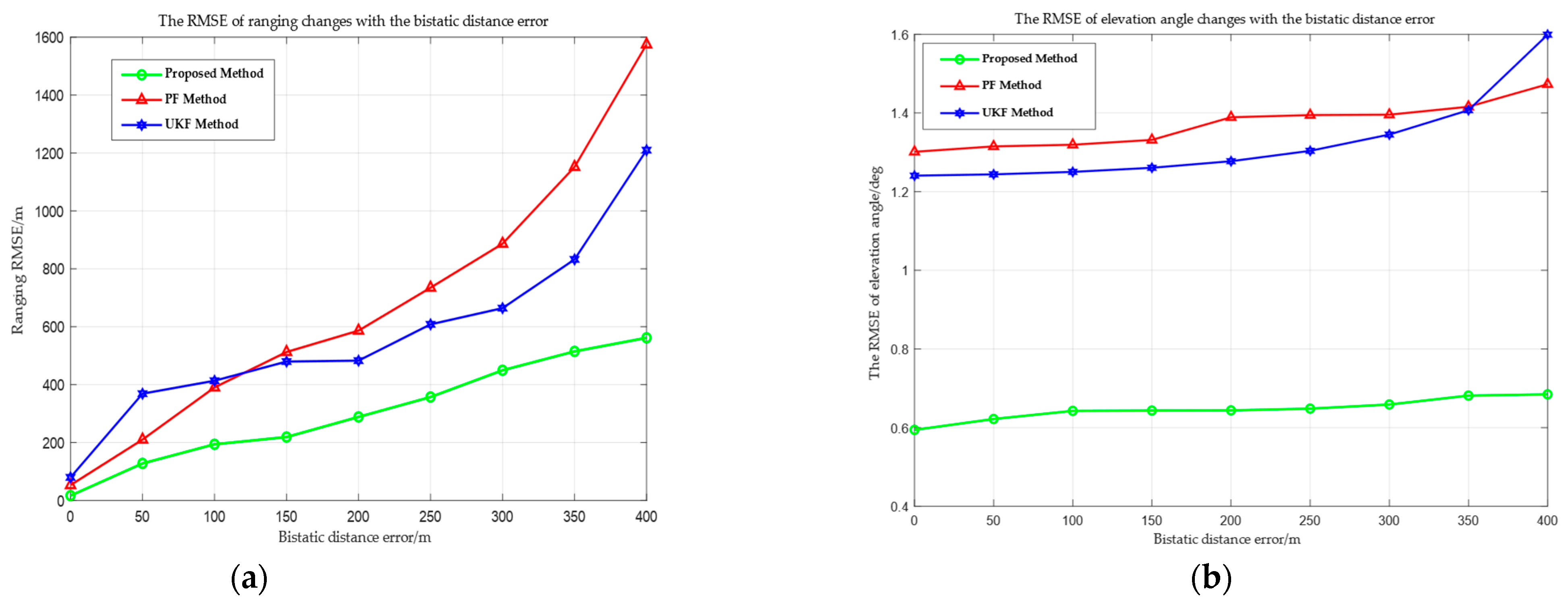
3.2. Analysis of the Influence of Bistatic Distance Error
3.3. Analysis of the Influence of Azimuth Error
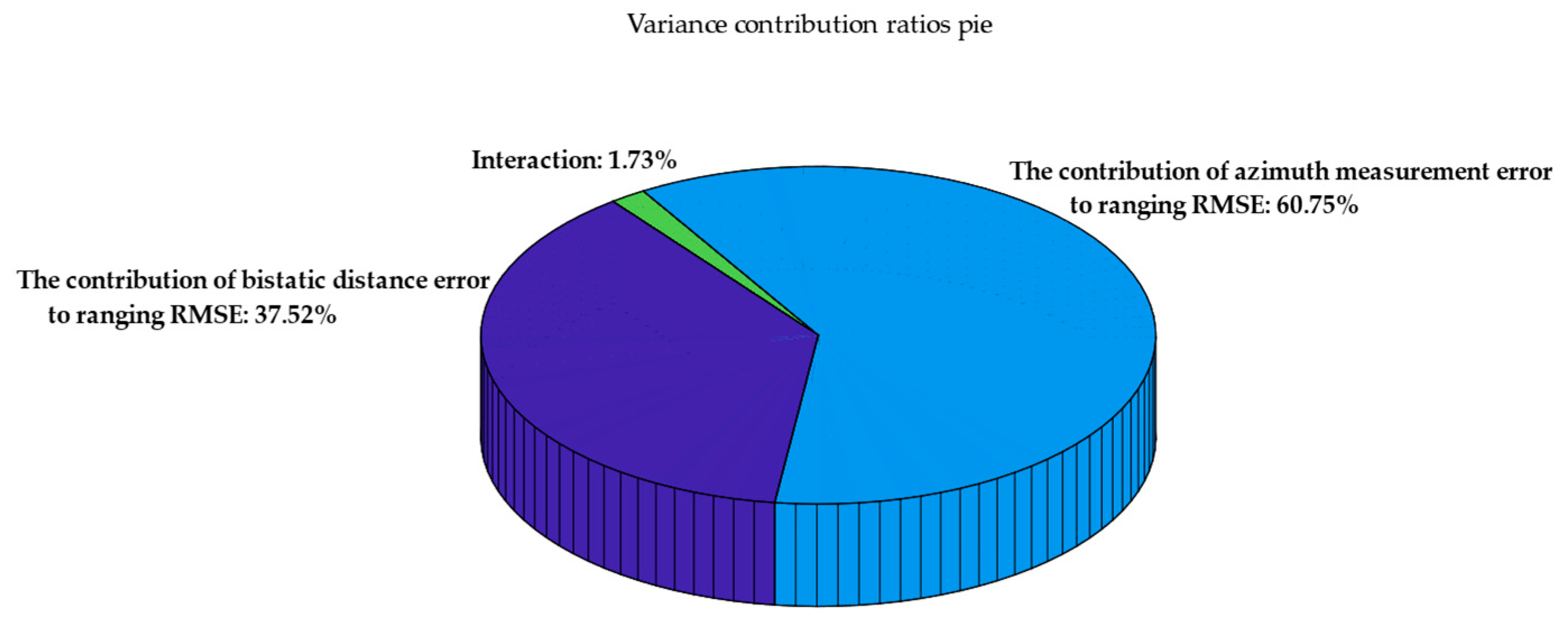
3.4. Simultaneous Analysis of the Influence of Bistatic Distance Error and Azimuth Error
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TDOA | Time Difference of Arrival |
| FDOA | Frequency Difference of Arrival |
| DPD | Direct Position Determination |
| MIMO | Multiple Input–Multiple Output |
| SDR | Semidefinite Relaxation |
| DoA | Direction of Arrival |
| DoD | Direction of Departure |
| MUSIC | Multiple Signal Classification |
| GEO | Geostationary Earth Orbit |
| ECEF | Earth-Centered Earth-Fixed |
| UKF | Unscented Kalman Filter |
| PF | Particle Filter |
| RMSE | Root Mean Square Error |
| ANOVA | Analysis of Variance |
References
- Weiss, A.J.; Amar, A. Direct Position Determination of Multiple Radio Signals. EURASIP J. Appl. Signal Process. 2005, 2005, 653549. [Google Scholar] [CrossRef]
- Bar-Shalom, O.; Weiss, A.J. Direct Positioning of Stationary Targets Using MIMO Radar. Signal Process. 2011, 91, 2345–2358. [Google Scholar] [CrossRef]
- Zhang, G.; Yi, W.; Varshney, P.K.; Kong, L. Direct Target Localization with Quantized Measurements in Noncoherent Distributed MIMO Radar Systems. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5103618. [Google Scholar] [CrossRef]
- Ho, K.C.; Lu, X.; Kovavisaruch, L. Source Localization Using TDOA and FDOA Measurements in the Presence of Receiver Location Errors: Analysis and Solution. IEEE Trans. Signal Process. 2007, 55, 684–696. [Google Scholar] [CrossRef]
- Zhang, F.; Sun, Y.; Zou, J.; Zhang, D.; Wan, Q. Closed-Form Localization Method for Moving Target in Passive Multistatic Radar Network. IEEE Sens. J. 2020, 20, 980–990. [Google Scholar] [CrossRef]
- Mao, Z.; Su, H.; He, B.; Jing, X. Moving Source Localization in Passive Sensor Network with Location Uncertainty. IEEE Signal Process. Lett. 2021, 28, 823–827. [Google Scholar] [CrossRef]
- Dianat, M.; Taban, M.R.; Dianat, J.; Sedighi, V. Target Localization Using Least Squares Estimation for MIMO Radars with Widely Separated Antennas. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2730–2741. [Google Scholar] [CrossRef]
- Liang, J.; Wang, D.; Su, L.; Chen, B.; Chen, H.; So, H.C. Robust MIMO Radar Target Localization via Nonconvex Optimization. Signal Process. 2016, 122, 33–38. [Google Scholar] [CrossRef]
- Zheng, R.; Wang, G.; Ho, K.C. Accurate Semidefinite Relaxation Method for Elliptic Localization with Unknown Transmitter Position. IEEE Trans. Wirel. Commun. 2021, 20, 2746–2760. [Google Scholar] [CrossRef]
- Liang, J.; Leung, C.S.; So, H.C. Lagrange Programming Neural Network Approach for Target Localization in Distributed MIMO Radar. IEEE Trans. Signal Process. 2016, 64, 1574–1585. [Google Scholar] [CrossRef]
- Xiong, W.; Schindelhauer, C.; So, H.C.; Schott, D.J.; Rupitsch, S.J. Robust TDOA Source Localization Based on Lagrange Programming Neural Network. IEEE Signal Process. Lett. 2021, 28, 1090–1094. [Google Scholar] [CrossRef]
- Fortunati, S.; Sanguinetti, L.; Gini, F.; Greco, M.S.; Himed, B. Massive MIMO Radar for Target Detection. IEEE Trans. Signal Process. 2020, 68, 859–871. [Google Scholar] [CrossRef]
- Song, H.; Wen, G.; Liang, Y.; Zhu, L.; Luo, D. Target Localization and Clock Refinement in Distributed MIMO Radar Systems with Time Synchronization Errors. IEEE Trans. Signal Process. 2021, 69, 3088–3103. [Google Scholar] [CrossRef]
- Shin, H.; Chung, W. Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems. Sensors 2019, 19, 2524. [Google Scholar] [CrossRef]
- Yi, J.; Wan, X.; Leung, H.; Lu, M. Joint Placement of Transmitters and Receivers for Distributed MIMO Radars. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 122–134. [Google Scholar] [CrossRef]
- Chen, J.; Li, Y.; Yang, X.; Li, Q.; Liu, F.; Wang, W.; Li, C.; Duan, C. A Two-Stage Aerial Target Localization Method Using Time-Difference-of-Arrival Measurements with the Minimum Number of Radars. Remote Sens. 2023, 15, 2829. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target Localization Accuracy Gain in MIMO Radar-Based Systems. IEEE Trans. Inform. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef]
- Rui, L.; Ho, K.C. Elliptic Localization: Performance Study and Optimum Receiver Placement. IEEE Trans. Signal Process. 2014, 62, 4673–4688. [Google Scholar] [CrossRef]
- Jiao, X.; Zhang, J.; Chen, J.; Jiang, L.; Wang, Y.; Li, Y.; Wang, W. An Aerial Target Localization Method Using TOA and AOA Measurements with GEO-UAV Bistatic Configuration. Adv. Electr. Comp. Eng. 2024, 24, 19–26. [Google Scholar] [CrossRef]
- Krawczyk, G. Strategies for Target Localization in Passive Bistatic Radar. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Cheng, Y.; Gu, H.; Su, W. Joint 4-D Angle and Doppler Shift Estimation via Tensor Decomposition for MIMO Array. IEEE Commun. Lett. 2012, 16, 917–920. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Long, L.; Liao, G.; Griffiths, H. Multiple Target Three-Dimensional Coordinate Estimation for Bistatic MIMO Radar with Uniform Linear Receive Array. EURASIP J. Adv. Signal Process. 2013, 2013, 81. [Google Scholar] [CrossRef]
- Shoaib, M.; Umar, R.; Bilal, M.; Hadi, M.A.; Alam, M.; Jamil, K. Comparison of DOA Algorithms for Target Localization in UCA FM Bi-Static Passive Radar. In Proceedings of the 2023 IEEE International Radar Conference (RADAR), Sydney, Australia, 6 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Chen, H.; Wang, W.; Liu, W.; Tian, Y.; Wang, G. An Exact Near-Field Model Based Localization for Bistatic MIMO Radar with COLD Arrays. IEEE Trans. Veh. Technol. 2023, 72, 16021–16030. [Google Scholar] [CrossRef]
- Yao, B.; Wang, W.; Yin, Q. DOD and DOA Estimation in Bistatic Non-Uniform Multiple-Input Multiple-Output Radar Systems. IEEE Commun. Lett. 2012, 16, 1796–1799. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, Z.; Wang, S.; Dai, F. Direction Finding for Bistatic MIMO Radar with Uniform Circular Array. Int. J. Antennas Propag. 2013, 2013, 674878. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, X.; Bai, Y.; Tang, L. A Fast Algorithm for Single Source 3-D Localization of MIMO Radar with Uniform Circular Transmit Array. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 475–478. [Google Scholar]
- Qin, Z.; Wang, J.; Wei, S. An Efficient Localization Method Using Bistatic Range and AOA Measurements in Multistatic Radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 0411–0416. [Google Scholar]
- Daun, M.; Koch, W. Multistatic Target Tracking for Non-Cooperative Illuminating by DAB/DVB-T. In Proceedings of the OCEANS 2007—Europe, Aberdeen, UK, 18–21 June 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Choi, S.; Crouse, D.; Willett, P.; Zhou, S. Multistatic Target Tracking for Passive Radar in a DAB/DVB Network: Initiation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2460–2469. [Google Scholar] [CrossRef]
- Imani, S.; Peimany, M.; Hasankhan, M.J.; Feraidooni, M.M. Bi-Static Target Localization Based on Inaccurate TDOA-AOA Measurements. Signal Image Video Process. 2022, 16, 239–245. [Google Scholar] [CrossRef]
- Kumar, M.; Mondal, S. State Estimation of Radar Tracking System Using a Robust Adaptive Unscented Kalman Filter. Aerosp. Syst. 2023, 6, 375–381. [Google Scholar] [CrossRef]
- Rohal, P.; Ochodnicky, J. Radar Target Tracking by Kalman and Particle Filter. In Proceedings of the 2017 Communication and Information Technologies (KIT), Vysoke Tatry, Slovakia, 4–6 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step 1: Let , where , . By , we get the expression for : |
| Step 2: is orthogonal to and , and we can get the expression for : |
| Step 3: Normalize and . |
| Input: 1. Intercept interval of the two-dimensional projection of the target’s short-term linear trajectory , slope k; 2. Minimum threshold for intercept interval length th; 3. Slope and intercept of the projection of the intersecting line of the ellipse at multiple adjacent points: , . |
| Step 1: Defining variable step size , find the total curvature of the line connecting of target positions at and . Taking as an example, the two-dimensional coordinate of the i-th target position can be found from Formula (16) as follows: |
| By solving the ellipsoid Equation (8), we can obtain the three-dimensional coordinates of the i-th target position. Similarly, we can obtain the three-dimensional coordinates , , and of the adjacent positions, and the corresponding total curvature is |
|
The calculation steps for the coordinates of each point at and the total curvature are the same as above. Step 2: Update the split interval, if , then ; otherwise . Step 3: If the interval of the intercept value is below the set threshold , exit the loop. Step 4: The actual intercept of the two-dimensional projection of the target’s short-term straight flight trajectory is ; Step 5: Solve the three-dimensional coordinates of the target position: , , , . |
| Parameter | Value | Unit |
|---|---|---|
| The azimuth range of the target relative to the receiver | deg | |
| The elevation range of the target relative to the receiver | deg | |
| The distance range of the target relative to the receiver | km |
| Low | Medium | High | |
| Error magnitude/m |
| Low | Medium | High | |
| Error magnitude/deg |
| /m | /deg | Mean Ranging RMSE/m |
|---|---|---|
| 100 | 0.5 | 326.47 |
| 100 | 2 | 553.09 |
| 100 | 4 | 818.95 |
| 200 | 0.5 | 522.85 |
| 200 | 2 | 694.01 |
| 200 | 4 | 1153.82 |
| 400 | 0.5 | 786.94 |
| 400 | 2 | 912.17 |
| 400 | 4 | 1397.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Xie, H.; Shang, S.; Dang, H.; Song, D.; Yang, Z. A Three-Dimensional Target Localization Method for Satellite–Ground Bistatic Radar Based on a Geometry–Motion Cooperative Constraint. Sensors 2025, 25, 3568. https://doi.org/10.3390/s25113568
Zhang F, Xie H, Shang S, Dang H, Song D, Yang Z. A Three-Dimensional Target Localization Method for Satellite–Ground Bistatic Radar Based on a Geometry–Motion Cooperative Constraint. Sensors. 2025; 25(11):3568. https://doi.org/10.3390/s25113568
Chicago/Turabian StyleZhang, Fangrui, Hu Xie, She Shang, Hongxing Dang, Dawei Song, and Zepeng Yang. 2025. "A Three-Dimensional Target Localization Method for Satellite–Ground Bistatic Radar Based on a Geometry–Motion Cooperative Constraint" Sensors 25, no. 11: 3568. https://doi.org/10.3390/s25113568
APA StyleZhang, F., Xie, H., Shang, S., Dang, H., Song, D., & Yang, Z. (2025). A Three-Dimensional Target Localization Method for Satellite–Ground Bistatic Radar Based on a Geometry–Motion Cooperative Constraint. Sensors, 25(11), 3568. https://doi.org/10.3390/s25113568