
Study on Electric Power Fittings Identification Method for Snake Inspection Robot Based on Non-Contact Inductive Coils

Abstract
1. Introduction
- (1)
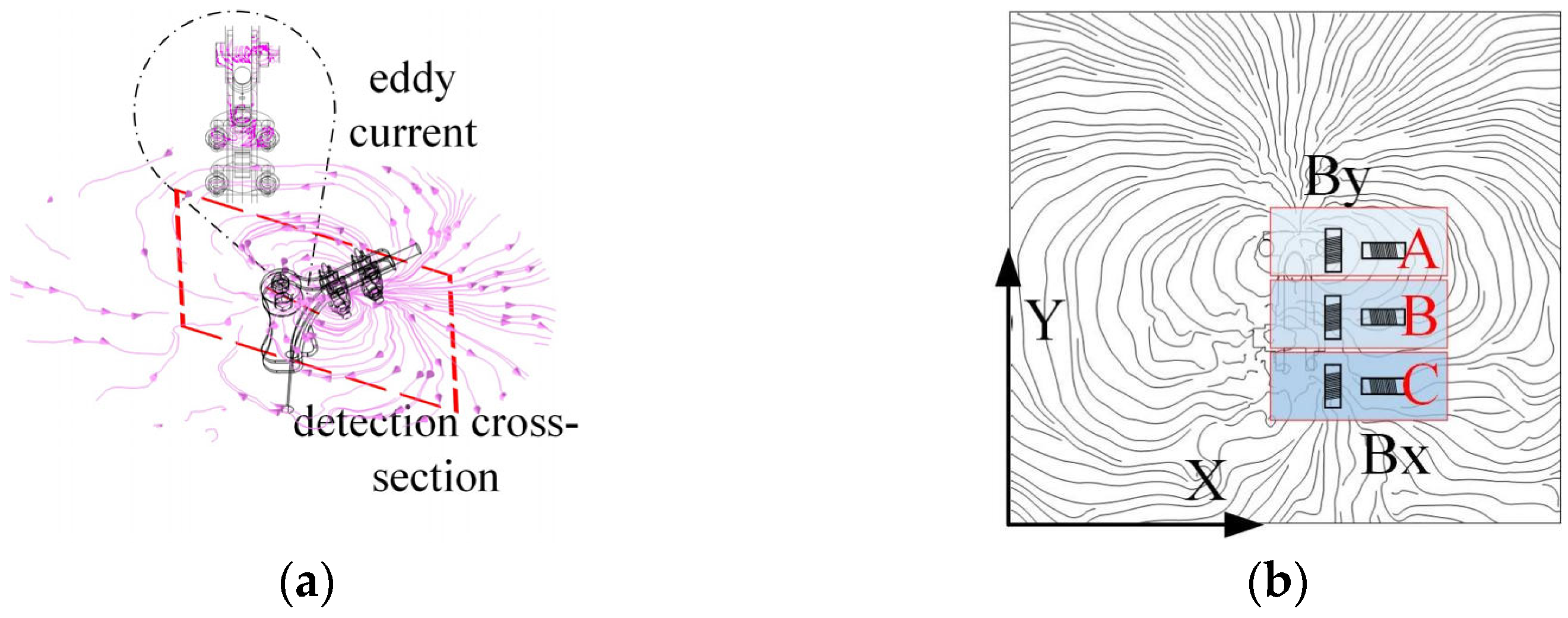
- The magnetic field distribution model affected by the detection cross-section of the electric power fittings is established based on the Dodd–Deeds eddy current calculation model [28] and the cross-section characteristic function of the electric power fittings. A theoretical comparison of the distribution of magnetic field strength of the electric power fittings at the detection cross-section is to be made, with the trend of change in magnetic field strength and the extreme difference taken as the classification eigenvalue. This will enable the preliminary determination of the sensor arrangement and range.
- (2)
- The concept of condition number, when combined with the singular value decomposition (SVD) method, is employed to analyse the impact of the detection position on the accuracy of the classification backpropagation results of electric power fixtures. This is followed by the use of an improved particle swarm algorithm. By means of an adaptive adjustment of the inertial weights, the optimal detection position matrix can be derived in order to reduce the impact of the detection position on the classification backpropagation results. The distribution of the induction coil sensor position can then be determined by combining this matrix with the structural characteristics of the serpentine robot.
- (3)
- The trend of sensor signal change and the order of sensor signal extreme difference size are employed as the feature signals of a BP neural network fusion algorithm optimised by a genetic algorithm for the purpose of classifying inductive signals at the same detection position and completing the task of distinguishing electric power fittings.
2. Snake Robot Operating Environment and Electric Power Fittings Recognition Mechanism
2.1. Subsection Robot Structure and Its Winding Motion Conditions
2.2. Mechanism for Identifying Types of Electric Power Fittings
3. Influence of Electric Power Fittings on the Magnetic Field of Transmission Lines
3.1. Modelling of Magnetic Field Strength Around Electric Power Fittings
3.2. Trend of Magnetic Field Strength in the Detected Cross-Section
- (1)
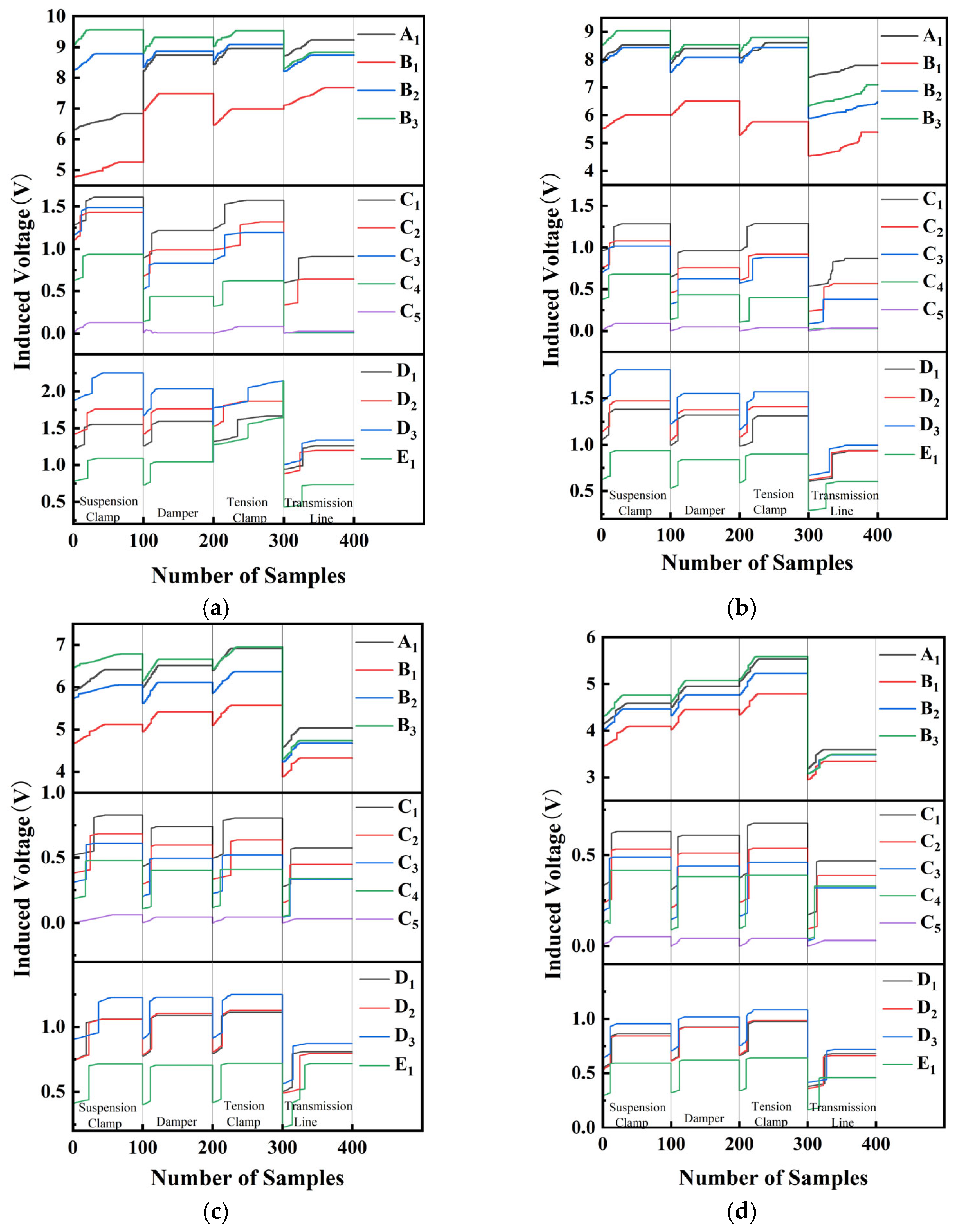
- Figure 8a illustrates that, within the range of 0.05 m to 0.25 m, a variety of electric power fittings exhibit a magnetic field strength that aligns with the observed trend. As the distance increases, the magnetic field strength also rises. The strength of the magnetic field decreases in comparison to the slope of the trend line. It can be observed that tension clips and suspension clips undergo the most significant amplitude change, whereas the transmission line and damper exhibit a comparatively minor amplitude change. The latter two variables are difficult to distinguish from one another.
- (2)
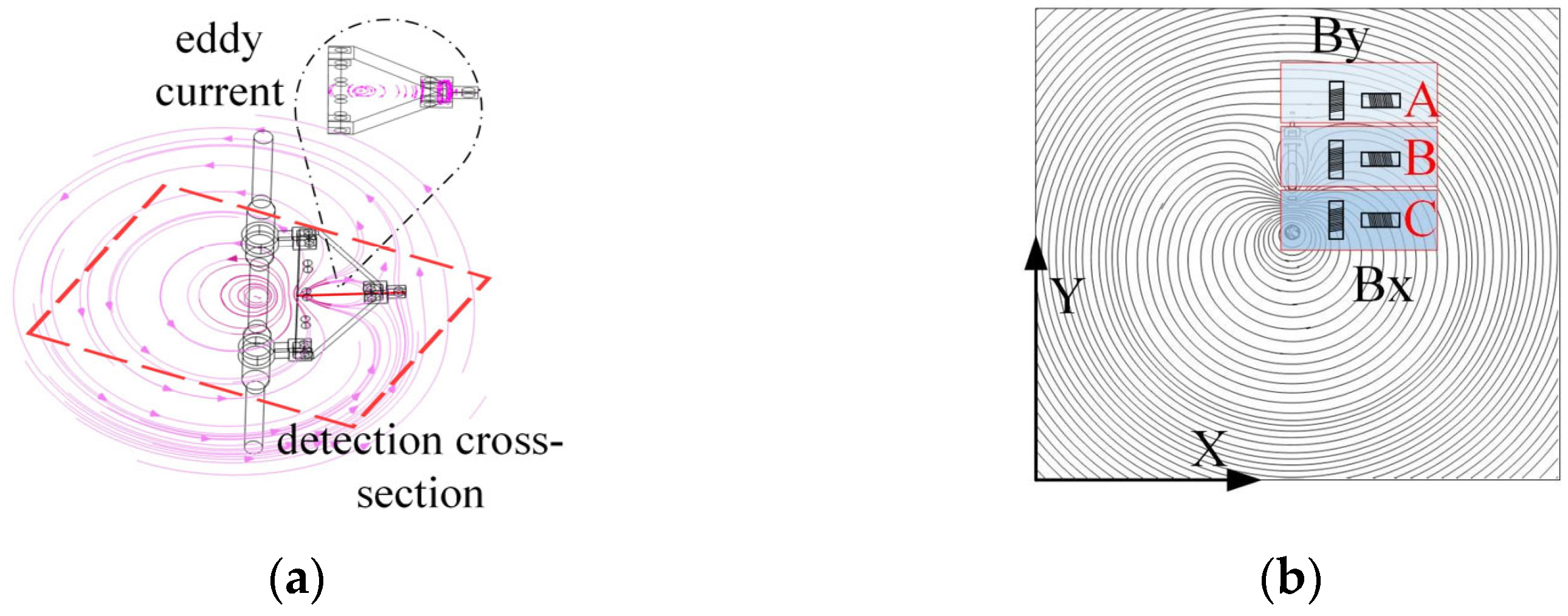
- As illustrated in Figure 8b, within the range of 0 m to 0.25 m, the variation in tension clamp and suspension clamp amplitudes is comparable, with the latter exhibiting the greatest amplitude. Conversely, the amplitude of the transmission line and damper is relatively minor, yet the gap is considerable, rendering the detection of changes in magnetic field strength (Bx) along the Y-axis a straightforward process. This allows for the differentiation between the four aforementioned types.
- (3)
- As illustrated in Figure 8c, within the range of 0.05 m to 0.25 m, the trend line slopes of the remaining electric power fittings, with the exception of transmission lines, exhibit a similar pattern. However, the trend curve slopes are more pronounced. A negative value of −5000 indicates that the change in magnetic field strength (Bx) can be readily discerned by the induction coil. However, to obtain a more pronounced discrepancy in the detection data, it is necessary to increase the spacing between the coil detections.
- (4)
- As shown in Figure 8d, in the range of 0 m to 0.25 m, the slopes of the trend lines of electric power fittings other than transmission lines are large, and the difference is large, and a smaller detection distance of the induction coils can detect a large difference in data.

3.3. Influence of Electric Power Fittings on Magnetic Fields and Detection Methods
3.3.1. Influence of Damper on Magnetic Field Distribution Around Transmission Lines and Detection Methods
3.3.2. Effect of Suspension Clamps on Magnetic Field Distribution Around Transmission Lines and Detection Methods
3.3.3. Impact of the Tension Clamp on the Magnetic Field Distribution Around Transmission Lines and Detection Methods
4. Distribution of Inductive Coil Sensor Array and Electric Power Fittings Classification Algorithm
4.1. Uncertainty Analysis of Fittings Type Recognition
4.2. Optimization of Inductive Coil Sensor Distribution
4.3. Induced Electromotive Force (EMF) Signal Classification Algorithm
5. Experimental Results Verification
5.1. Physical Experiment
5.2. Sensor Signal Acquisition Results and Analysis
5.3. Classification Results of the GA-BP Neural Network Algorithm
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Z.; Fang, Z.; Yang, S.; Xiong, Y.; Zhang, D. Research on the Spiral Rolling Gait of High-Voltage Power Line Serpentine Robots Based on Improved Hopf-Cpgs Model. Appl. Sci. 2025, 15, 1285. [Google Scholar] [CrossRef]
- Yang, Z.; Ning, C.; Xiong, Y.; Wang, F.; Quan, X.; Zhang, C. Snake Robot Gait Design for Climbing Eccentric Variable-Diameter Obstacles on High-Voltage Power Lines. Actuators 2025, 14, 184. [Google Scholar] [CrossRef]
- Ekren, N.; Karagöz, Z.; Şahin, M. A Review of Line Suspended Inspection Robots for Power Transmission Lines. J. Electr. Eng. Technol. 2024, 19, 2549–2583. [Google Scholar] [CrossRef]
- Li, G.; Waldum, H.B.; Grindvik, M.O.; Jørundl, R.S.; Zhang, H. Development of a Vision-Based Target Exploration System for Snake-Like Robots in Structured Environments. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420936141. [Google Scholar] [CrossRef]
- Bing, Z.; Lemke, C.; Morin, F.O.; Jiang, Z.; Cheng, L.; Huang, K.; Knoll, A. Perception-Action Coupling Target Tracking Control for a Snake Robot Via Reinforcement Learning. Front. Neurorobotics 2020, 14, 591128. [Google Scholar] [CrossRef]
- Chen, G.; Wang, S.; Liu, Y.; Li, J.; Qin, G.; Wang, J.; Sun, A.; Yuan, L. Research on Transmission Line Hardware Identification Based on Improved Yolov5 and Deblurganv2. IEEE Access 2023, 11, 133351–133362. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Jia, X. An Enhanced Sl-Yolov8-Based Lightweight Remote Sensing Detection Algorithm for Identifying Broken Strands in Transmission Lines. Appl. Sci. 2024, 14, 7469. [Google Scholar] [CrossRef]
- Wang, X.; Cao, Q.; Jin, S.; Chen, C.; Feng, S. Research on Detection Method of Transmission Line Strand Breakage Based on Improved Yolov8 Network Model. IEEE Access 2024, 12, 168197–168212. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed with Convolutional Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1486–1498. [Google Scholar] [CrossRef]
- Zhu, X.F.; Li, X.L.; Zhang, S.C. Block-Row Sparse Multiview Multilabel Learning for Image Classification. IEEE Trans. Cybern. 2016, 46, 450–461. [Google Scholar] [CrossRef]
- Yang, W.; Wang, G.; Shen, Y. Perception-Aware Path Finding and Following of Snake Robot in Unknown Environment. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2020, Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Venkatesh, M.N.; Dash, A.; Bandopadhaya, S. Design of Snake Robot with 28015 Ping Ultrasonic Distance Sensor and Arduino. In Proceedings of the 3rd Innovative Product Design and Intelligent Manufacturing System, IPDIMS 2021, Rourkela, India, 30–31 December 2021. [Google Scholar]
- Jiang, W.; Zou, D.; Zhou, X.; Zuo, G.; Ye, G.C.; Li, H.J. Research on Key Technologies of Multi-Task-Oriented Live Maintenance Robots for Ultra High Voltage Multi-Split Transmission Lines. Ind. Robot. Int. J. Robot. Res. Appl. 2021, 48, 17–28. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Sun, A.; Qin, G. Hardware Identification & Distance Estimation for an High-Voltage Transmission Line Inspection Robot. In Proceedings of the 2023 IEEE 13th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Qinhuangdao, China, 11–14 July 2023. [Google Scholar]
- Vasiljevic, G.; Martinovic, D.; Orsag, M.; Bogdan, S. Grabbing Power Line Conductors Based on the Measurements of the Magnetic Field Strength. arXiv 2023. [Google Scholar] [CrossRef]
- Zhang, J.; Xiang, X.; Li, W. Advances in Marine Intelligent Electromagnetic Detection System, Technology, and Applications: A Review. IEEE Sens. J. 2023, 23, 4312–4326. [Google Scholar] [CrossRef]
- Wang, W.; Bai, Y.; Wu, G.; Xiao, H.; Yang, Z.; Xu, X. An Electromagnetic Navigation Method Based on Information Fusion for Inspection Robot. Autom. Electr. Power Syst. 2013, 37, 73–79. [Google Scholar]
- Zorić, F.; Flegarić, S.; Vasiljević, G.; Bogdan, S.; Kovačić, Z. Autonomous Installation of Electrical Spacers on Power Lines Using Magnetic Localization and Special End Effector. Machines 2023, 11, 510. [Google Scholar] [CrossRef]
- Joseph, M.; Tedrake, R. Magnetic Localization for Perching Uavs on Powerlines. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, Celebrating 50 Years of Robotics, IROS’11, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Xu, Y.; Zhang, S.; Li, S.; Wu, Z.; Li, Y.; Li, Z.; Chen, X.; Shi, C.; Chen, P.; Zhang, P.; et al. A Soft Magnetoelectric Finger for Robots’ Multidirectional Tactile Perception in Non-Visual Recognition Environments. NPJ Flex. Electron. 2024, 8, 2. [Google Scholar] [CrossRef]
- Li, N.; Yin, Z.; Zhang, W.; Xing, C.; Peng, T.; Meng, B.; Yang, J.; Peng, Z. Triboelectric-Inductive Hybrid Tactile Sensor for Highly Accurate Object Recognition. Nano Energy 2022, 96, 107063. [Google Scholar] [CrossRef]
- Ma, Z.; Ai, J.; Zhang, X.; Du, Z.; Wu, Z.; Wang, K.; Chen, D.; Su, B. Merkel’s Disks Bioinspired Self-Powered Flexible Magnetoelectric Sensors toward the Robotic Arm’s Tactile Perceptual Functioning and Smart Learning. Adv. Intell. Syst. 2020, 2, 1900140. [Google Scholar] [CrossRef]
- Liu, S.; Li, C.; Yuwen, T.; Wan, Z.; Luo, Y. A Lightweight Lidar-Camera Sensing Method of Obstacles Detection and Classification for Autonomous Rail Rapid Transit. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23043–23058. [Google Scholar] [CrossRef]
- Feng, S.; Ji, K.; Zhang, L.; Ma, X.; Kuang, G. Sar Target Classification Based on Integration of Asc Parts Model and Deep Learning Algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 10213–10225. [Google Scholar] [CrossRef]
- Wang, L.; Hong, L.; Fu, H.; Cai, Z.; Zhong, Y.; Wang, L. Adaptive Distance-Based Multi-Objective Particle Swarm Optimization Algorithm with Simple Position Update. Swarm Evol. Comput. 2025, 94, 101890. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, Y.; Yang, Y. Multi-Sensor GA-BP Algorithm Based Gearbox Fault Diagnosis. Appl. Sci. 2022, 12, 3106. [Google Scholar] [CrossRef]
- Zhuang, X.; Ma, J.; Chen, B.; Lan, H.; Niu, Y. Multi-Source Data Recognition and Fusion Algorithm Based on a Two-Layer Genetic Algorithm-Back Propagation Model. Front. Big Data 2025, 7, 1520605. [Google Scholar]
- Jiang, F.; Liu, S. Evaluation of Cracks with Different Hidden Depths and Shapes Using Surface Magnetic Field Measurements Based on Semi-Analytical Modelling. J. Phys. D Appl. Phys. 2018, 51, 125002. [Google Scholar] [CrossRef]
- Xing, Y.; Liu, J.; Li, F.; Zhang, G.; Li, J. Non-Contact Voltage Reconstruction Method Based on Dual-Pin Type Probes Structure and Measuring Point Optimization for Ac Overhead Transmission Lines. IEEE Trans. Instrum. Meas. 2024, 73, 1501312. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Environmental Adaptability | Best Distance for Identifying Obstacles | Accuracy Rate | Main Limitations |
|---|---|---|---|---|
| Industrial Camera [14] | Visual | 1.5 m | 70% | Depends on lighting, cannot work blindly |
| LiDAR [23] | Visual | 16 m | 85.5% | Often combined with a camera, high cost |
| Non-contact Inductive Coil | Non-visual | 5 cm | 99.8% | All-weather operation, independent of light |
| Magnetic Field Density | Direction of Change | Transmission Line B1 (mT) | Damper B2 (mT) | Tension Clamp B3 (mT) | Suspension Clamp B4 (mT) |
|---|---|---|---|---|---|
| Bx | X | 742.15 | 742.4 | 4434.26 | 1426.98 |
| Y | 664.68 | 1183.55 | 3550 | 3657 | |
| By | X | 845 | 3073.22 | 7141.79 | 4427.97 |
| Y | 742 | 2787.46 | 4951.84 | 3296.44 |
| Types of Electric Power Fittings | Basic Parameter |
|---|---|
| damper | Model: FD-6 Diameter: 70 mm Spacing: 75 mm |
| tension clamp | Model: NL-4 Envelope thickness: 10 mm Line distance: 120 mm |
| suspension clamp | Model: AXS 1880 Coupling thickness: 18 mm Line spacing: 110 mm |
| 5 cm | Suspension Clamp | Damper | Tension Clamp | Transmission Line |
|---|---|---|---|---|
| By | B3 > B2 > B1 B3 > B2 > A1 > B1 | B3 > B2 > B1 B3 > B2 > A1 > B1 | B3 > B2 > B1 B3 > B2 > A1 > B1 | B3 > B2 > B1 A1 > B3 > B2 > B1 |
| By | D3 > D2 > D1 > E1 | D3 > D2 > D1 > E1 | D3 > D2 > D1 > E1 | D3 > D1 > D2 > E1 |
| Bx | C1 > C3 > C2 > C4 > C5 | C1 > C3 > C2 > C4 > C5 | C1 > C3 > C2 > C4 > C5 | C1 > C3 > C2 > C4 > C5 |
| State | Damper | Tension Clamp | Suspension Clamp | Transmission Line |
|---|---|---|---|---|
| Output Node Representation | 1 | 2 | 3 | 4 |
| Category | Accuracy | Recall | F1 Score |
|---|---|---|---|
| 1 | 99.7% | 99.7% | 99.72% |
| 2 | 99.6% | 99.5% | 99.55% |
| 3 | 99.9% | 99.9% | 99.9% |
| 4 | 100% | 100% | 100% |
| Accuracy | 99.78% | ||
| Experiment Time | Number of Photos Captured | Recognition Accuracy |
|---|---|---|
| Morning | 1000 | 70% |
| Noon | 1000 | 67.2% |
| Evening | 1000 | 71% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Liu, J.; Yang, S.; Zhang, C. Study on Electric Power Fittings Identification Method for Snake Inspection Robot Based on Non-Contact Inductive Coils. Sensors 2025, 25, 3562. https://doi.org/10.3390/s25113562
Yang Z, Liu J, Yang S, Zhang C. Study on Electric Power Fittings Identification Method for Snake Inspection Robot Based on Non-Contact Inductive Coils. Sensors. 2025; 25(11):3562. https://doi.org/10.3390/s25113562
Chicago/Turabian StyleYang, Zhiyong, Jianguo Liu, Shengze Yang, and Changjin Zhang. 2025. "Study on Electric Power Fittings Identification Method for Snake Inspection Robot Based on Non-Contact Inductive Coils" Sensors 25, no. 11: 3562. https://doi.org/10.3390/s25113562
APA StyleYang, Z., Liu, J., Yang, S., & Zhang, C. (2025). Study on Electric Power Fittings Identification Method for Snake Inspection Robot Based on Non-Contact Inductive Coils. Sensors, 25(11), 3562. https://doi.org/10.3390/s25113562