

Quantitative Analysis of Situation Awareness During Autonomous Vehicle Handover on the Da Vinci Research Kit

 , ,
, , 
Abstract
1. Introduction
- LoA 0: No automation. The vehicle is only permitted to send warning signals to the driver, it cannot interfere any of the controls. The human driver is responsible for controlling the vehicle in all aspects.
- LoA 1: Driver assistance. The vehicle is allowed to control either steering or acceleration in cooperation with the human driver.
- LoA 2: Partial automation. The vehicle performs complex actions by controlling both steering and acceleration in limited use-cases. The constant monitoring of the environment by the human driver is still required.
- LoA 3: Conditional automation. The vehicle is prepared for the dynamic driving task by limited perception and decision-making abilities. The human driver is allowed to divert its attention, in such a manner that they are able to take control back at any time if a fall-back event occurs.
- LoA 4: High automation. The vehicle is equipped to perform the dynamical driving task in pre-defined driving modes. No real-time human–machine interaction is required, as the vehicle is able to move to a safe state from an emergency, among all possible conditions. In this safe state, the human driver could take over control.
- LoA 5: Full automation. The vehicle is able to accomplish the dynamic driving task in all the driving modes, regardless of the environment conditions.

2. Related Work
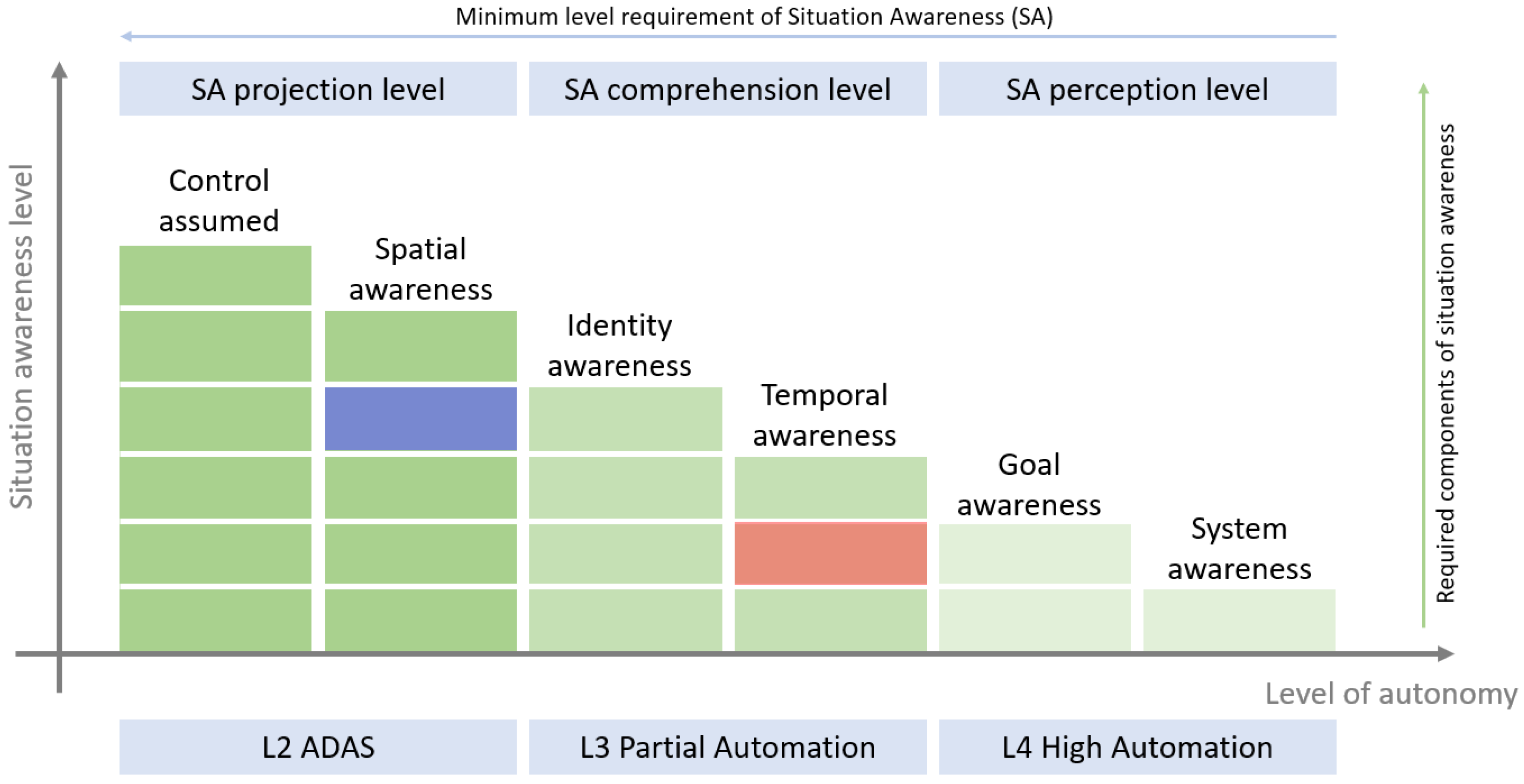
- Level 1 SA—perception of the environment;
- Level 2 SA—comprehension of the current situation;
- Level 3 SA—projection of future status.
- Spatial awareness—knowledge of object locations;
- Identity awareness—knowledge of salient items;
- Temporal awareness—knowledge of the dynamic states;
- Goal awareness—knowledge of the maneuvering plan;
- System awareness—knowledge of the environment.
3. Experimental Setup
4. Experimental Protocol
- True alarm: The pedestrian stepped in front of the car from behind a vending machine (Figure 5), close enough to hit them (alarm raised 3 s before the vehicle reaches the pedestrian).
- False alarm: The pedestrian was moving on the sidewalk, with safe distance from the car (alarm raised 3 seconds before the vehicle reaches the pedestrian).
- Car arriving: There was oncoming traffic.
- No car arriving: There was no oncoming traffic.

- True alarm, no car arriving;
- False alarm, car arriving;
- True alarm, car arriving;
- False alarm, no car arriving.
5. Results
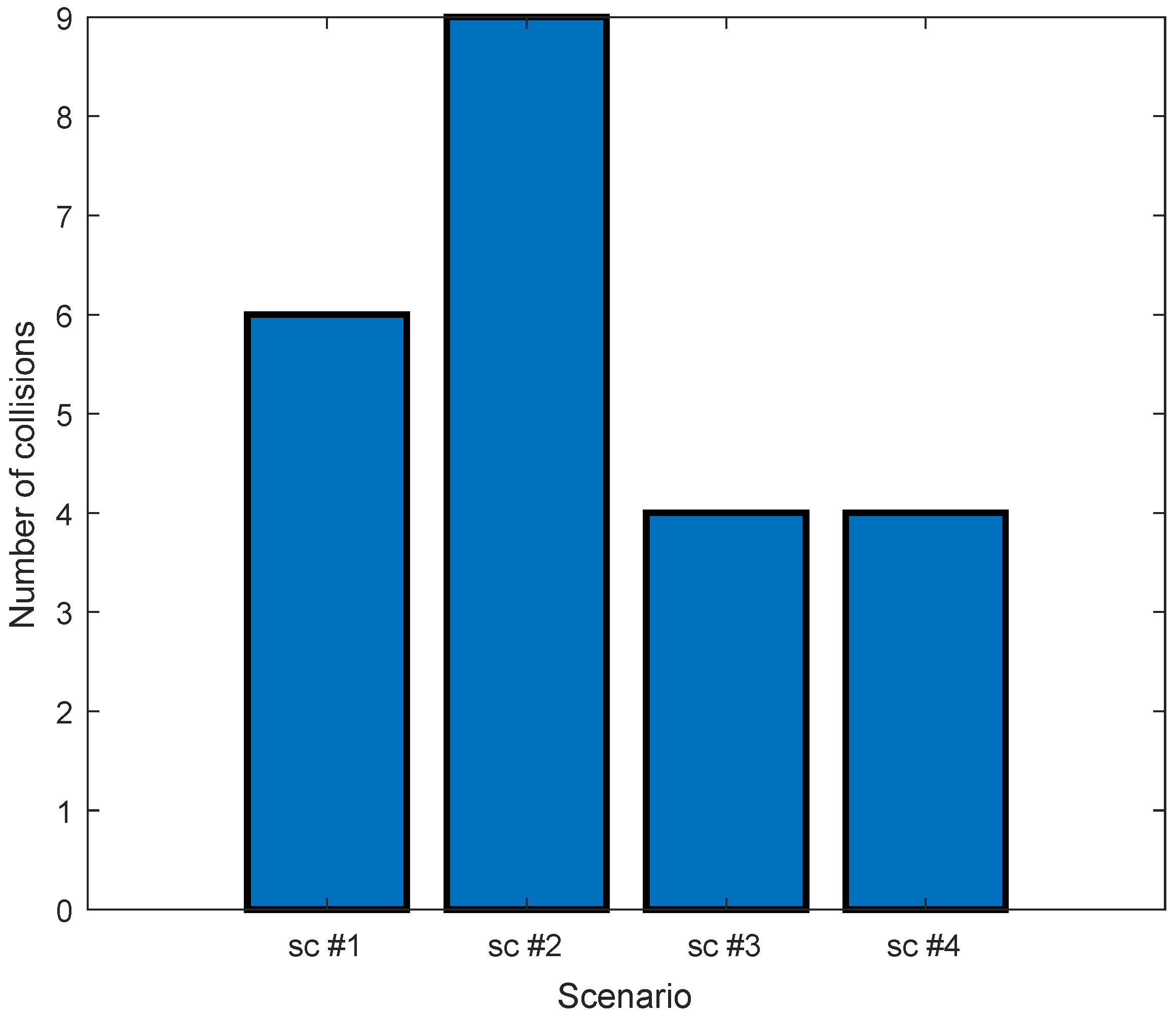
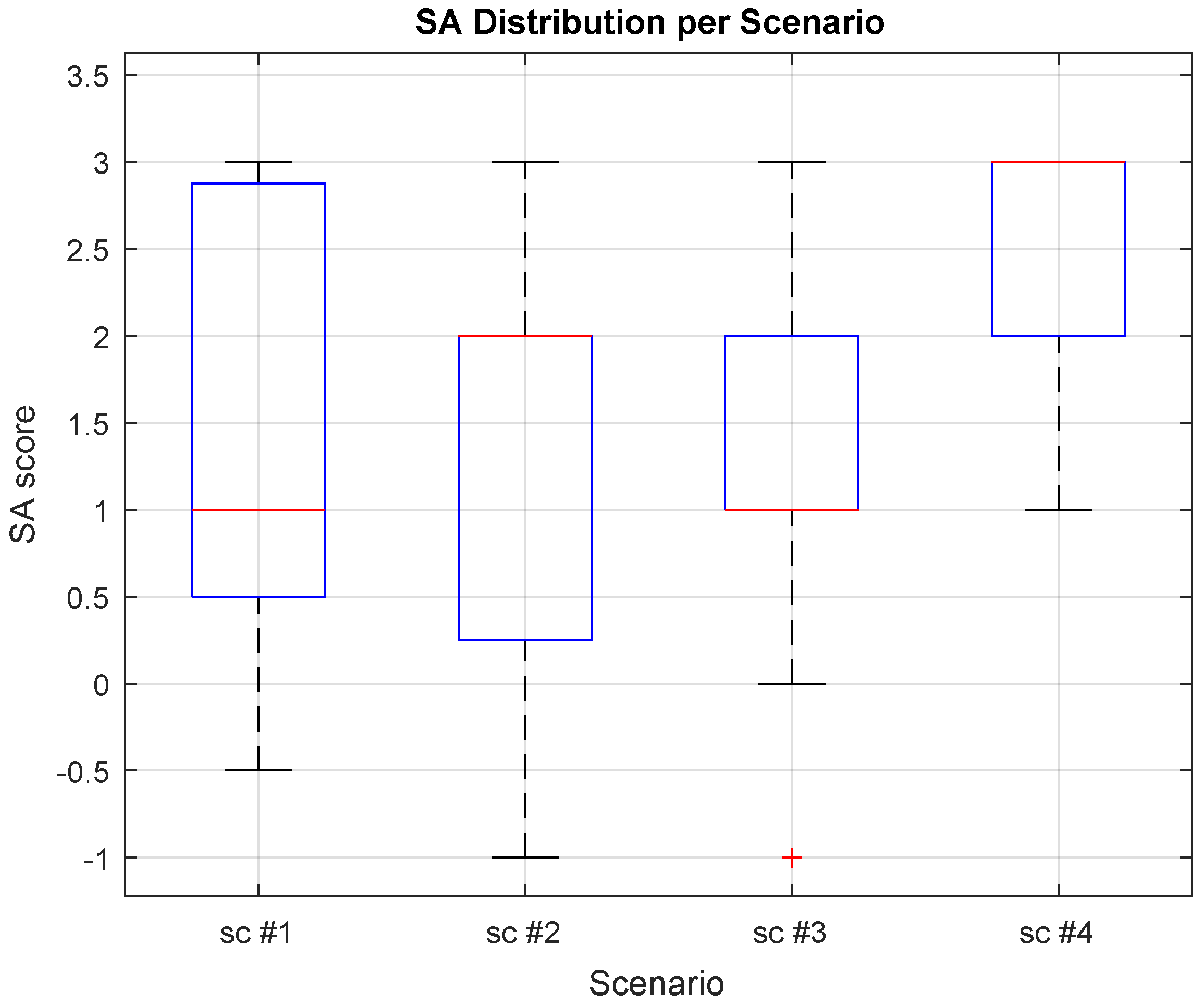
- Scenario 1 (true alarm, no oncoming traffic):
- -
- 80% correctly identified the pedestrian as the cause of the emergency;
- -
- Only 40% remembered the pedestrian’s pants color;
- -
- 53.3% correctly identified the road’s leftward turn.
- Scenario 2 (false alarm, oncoming traffic):
- -
- 73.3% recognized that the emergency was due to the automation system;
- -
- 86.7% correctly recalled that a forest was on the right;
- -
- Only 26.7% identified the correct speed limit.
- Scenario 3 (true alarm, oncoming traffic):
- -
- 80% correctly identified the pedestrian as the cause of the emergency;
- -
- Only 33.3% placed correctly the bus stop location;
- -
- 73.3% realized there was no pedestrian crosswalk.
- Scenario 4 (false alarm, no oncoming traffic):
- -
- 60% identified the automation system as the cause of the emergency;
- -
- 93.3% correctly noted the absence of oncoming traffic;
- -
- 93.3% correctly identified houses on the left.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADAS | Advanced driver assistance systems |
| DVRK | Da Vinci Research Kit |
| HMI | Human–machine interface |
| LoA | Level of autonomy |
| MTM | Master tool manipulator |
| RAMIS | Robot-assisted minimally invasive surgery |
| ROS | Robot Operating System |
| SA | Situation awareness |
| SAE | Society of Automotive Engineers |
| SAGAT | Situation awareness global assessment technique |
| SART | Situational awareness rating technique |
References
- Takacs, A.; Rudas, I.; Bosl, D.; Haidegger, T. Highly Automated Vehicles and Self-Driving Cars [Industry Tutorial]. IEEE Robot. Autom. Mag. 2018, 25, 106–112. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2019. [Google Scholar]
- Porkolab, L.; Lakatos, I. A simulation system for testing side crashes in non-traditional seating positions for self-driving cars. Acta Polytech. Hung. 2023, 20, 63–82. [Google Scholar] [CrossRef]
- De Winter, J.C.; Happee, R.; Martens, M.H.; Stanton, N.A. Effects of adaptive cruise control and highly automated driving on workload and situation awareness: A review of the empirical evidence. Transp. Res. Part Traffic Psychol. Behav. 2014, 27, 196–217. [Google Scholar] [CrossRef]
- Endsley, M. Situation Awareness in Aviation Systems. In Handbook of Aviation Human Factors; CRC Press: Boca Raton, FL, USA, 1999; pp. 257–276. [Google Scholar] [CrossRef]
- Eriksson, A.; Stanton, N.A. Takeover Time in Highly Automated Vehicles: Noncritical Transitions to and From Manual Control. Hum. Factors J. Hum. Factors Ergon. Soc. 2017, 59, 689–705. [Google Scholar] [CrossRef]
- J3016_201806; Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International: Warrendale, PA, USA, 2021.
- Haidegger, T. Autonomy for Surgical Robots: Concepts and Paradigms. IEEE Trans. Med. Robot. Bionics 2019, 1, 65–76. [Google Scholar] [CrossRef]
- Endsley, M.R. Toward a theory of situation awareness in dynamic systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Walch, M.; Lange, K.; Baumann, M.; Weber, M. Autonomous driving: Investigating the feasibility of car-driver handover assistance. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications—AutomotiveUI’15, Nottingham, UK, 1–3 September 2015; pp. 11–18. [Google Scholar] [CrossRef]
- Morgan, P.; Alford, C.; Parkhurst, G. Handover Issues in Autonomous Driving: A Literature Review; Project Report; University of the West of England: Bristol, UK, 2016. [Google Scholar]
- Kazanzides, P.; Chen, Z.; Deguet, A.; Fischer, G.S.; Taylor, R.H.; DiMaio, S.P. An open-source research kit for the da Vinci® Surgical System. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 6434–6439. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Nagy, T.D.; Drexler, D.A.; Ukhrenkov, N.; Takács, A.; Haidegger, T. Situation Awareness at Autonomous Vehicle Handover: Preliminary Results of a Quantitative Analysis. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), 12h Workshop on Planning, Perception and Navigation for Intelligent Vehicles, Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 63–68. [Google Scholar]
- Drexler, D.A.; Takács, A.; Nagy, T.D.; Haidegger, T. Handover Process of Autonomous Vehicles—Technology and Application Challenges. Acta Polytech. Hung. 2019, 16, 235–255. [Google Scholar] [CrossRef]
- Maggi, D.; Romano, R.; Carsten, O. Transitions Between Highly Automated and Longitudinally Assisted Driving: The Role of the Initiator in the Fight for Authority. Hum. Factors 2020, 001872082094618. [Google Scholar] [CrossRef]
- Du, N.; Kim, J.; Zhou, F.; Pulver, E.; Tilbury, D.M.; Robert, L.P.; Pradhan, A.K.; Yang, X.J. Evaluating Effects of Cognitive Load, Takeover Request Lead Time, and Traffic Density on Drivers’ Takeover Performance in Conditionally Automated Driving. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, DC USA, 21–22 September 2020; pp. 66–73. [Google Scholar]
- Banks, V.A.; Plant, K.L.; Stanton, N.A. Driver error or designer error: Using the Perceptual Cycle Model to explore the circumstances surrounding the fatal Tesla crash on 7th May 2016. Saf. Sci. 2018, 108, 278–285. [Google Scholar] [CrossRef]
- Banerjee, S.S.; Jha, S.; Cyriac, J.; Kalbarczyk, Z.T.; Iyer, R.K. Hands Off the Wheel in Autonomous Vehicles?: A Systems Perspective on over a Million Miles of Field Data. In Proceedings of the 2018 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), Luxembourg City, Luxembourg, 25–28 June 2018; pp. 586–597. [Google Scholar] [CrossRef]
- Tamás, T.; Szabó, K. Combined Mathematical Modeling of Different Transport Networks, Considerations and Complex Analysis. Acta Polytech. Hung. 2017, 14, 7–26. [Google Scholar] [CrossRef]
- Weller, G.; Schlag, B. Behavioral Aspects of Driver Assistance Systems. In Handbook of Driver Assistance Systems: Basic Information, Components and Systems for Active Safety and Comfort; Winner, H., Hakuli, S., Lotz, F., Singer, C., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 91–107. [Google Scholar] [CrossRef]
- Palin, R.; Ward, D.; Habli, I.; Rivett, R. ISO 26262 safety cases: Compliance and assurance. In Proceedings of the 6th IET International Conference on System Safety 2011, Birmingham, UK, 20–22 September 2011; p. B12. [Google Scholar] [CrossRef]
- Houghtaling, M.A.; Fiorini, S.R.; Fabiano, N.; Gonçalves, P.J.; Ulgen, O.; Haidegger, T.; Carbonera, J.L.; Olszewska, J.I.; Page, B.; Murahwi, Z.; et al. Standardizing an ontology for ethically aligned robotic and autonomous systems. IEEE Trans. Syst. Man Cybern. Syst. 2023, 54, 1791–1804. [Google Scholar] [CrossRef]
- Kaber, D.B.; Endsley, M.R. The effects of level of automation and adaptive automation on human performance, situation awareness and workload in a dynamic control task. Theor. Issues Ergon. Sci. 2004, 5, 113–153. [Google Scholar] [CrossRef]
- Salmon, P.M.; Stanton, N.A.; Walker, G.H.; Jenkins, D.; Ladva, D.; Rafferty, L.; Young, M. Measuring Situation Awareness in complex systems: Comparison of measures study. Int. J. Ind. Ergon. 2009, 39, 490–500. [Google Scholar] [CrossRef]
- Matthews, M.L.; Bryant, D.J.; Webb, R.D.; Harbluk, J.L. Model for situation awareness and driving: Application to analysis and research for intelligent transportation systems. Transp. Res. Rec. 2001, 1779, 26–32. [Google Scholar] [CrossRef]
- Endsley, M.R. Measurement of situation awareness in dynamic systems. Hum. Factors 1995, 37, 65–84. [Google Scholar] [CrossRef]
- Endsley, M. Situation awareness global assessment technique (SAGAT). In Proceedings of the IEEE 1988 National Aerospace and Electronics Conference, Dayton, OH, USA, 23–27 May 1988; pp. 789–795. [Google Scholar] [CrossRef]
- Taylor, R.M. Situational awareness rating technique (SART): The development of a tool for aircrew systems design. In Situational Awareness; Routledge: London, UK, 2017; pp. 111–128. [Google Scholar]
- Salmon, P.; Stanton, N.; Walker, G.; Green, D. Situation awareness measurement: A review of applicability for C4i environments. Appl. Ergon. 2006, 37, 225–238. [Google Scholar] [CrossRef]
- Endsley, M.R.; Garland, D.J. Situation Awareness Analysis and Measurement; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Nagy, T.D.; Haidegger, T. Performance and Capability Assessment in Surgical Subtask Automation. Sensors 2022, 22, 2501. [Google Scholar] [CrossRef]
- Takács, K.; Lukács, E.; Levendovics, R.; Pekli, D.; Szijártó, A.; Haidegger, T. Assessment of surgeons’ stress levels with digital sensors during robot-assisted surgery: An experimental study. Sensors 2024, 24, 2915. [Google Scholar] [CrossRef]
- Haidegger, T.; Mai, V.; Mörch, C.M.; Boesl, D.O.; Jacobs, A.; Khamis, A.; Lach, L.; Vanderborght, B. Robotics: Enabler and inhibitor of the sustainable development goals. Sustain. Prod. Consum. 2023, 43, 422–434. [Google Scholar] [CrossRef]
- Prestes, E.; Houghtaling, M.A.; Gonçalves, P.J.; Fabiano, N.; Ulgen, O.; Fiorini, S.R.; Murahwi, Z.; Olszewska, J.I.; Haidegger, T. The first global ontological standard for ethically driven robotics and automation systems [standards]. IEEE Robot. Autom. Mag. 2021, 28, 120–124. [Google Scholar] [CrossRef]
- Lee, J.; Rheem, H.; Lee, J.D.; Szczerba, J.F.; Rajavenkatanarayanan, A.; Mathieu, R. Sharing vehicle situation awareness reduces driver-initiated overrides in urban environments. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2023, 67, 1178–1183. [Google Scholar] [CrossRef]
- Chen, J.; Gao, X.; Rong, J.; Gao, X. A situation awareness assessment method based on fuzzy cognitive maps. J. Syst. Eng. Electron. 2022, 33, 1108–1122. [Google Scholar] [CrossRef]
- Salmon, P.M.; Stanton, N.A.; Walker, G.H. Distributed situation awareness and vehicle automation: Case study analysis and design implications. In Handbook of Human Factors for Automated, Connected, and Intelligent Vehicles; CRC Press: Boca Raton, FL, USA, 2020; pp. 293–317. [Google Scholar]
- Saleh, K.; Hossny, M.; Nahavandi, S. Towards trusted autonomous vehicles from vulnerable road users perspective. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Takács, A.; Nagy, D.Á.; Rudas, I.J.; Haidegger, T. Origins of Surgical Robotics: From Space to the Operating Room. Acta Polytech. Hung. 2016, 13, 13–30. [Google Scholar]
- Hogan, N. Impedance Control: An Approach to Manipulation. J. Dyn. Syst. Meas. Control 1985, 107, 304–313. [Google Scholar] [CrossRef]
- D’Ausilio, A. Arduino: A low-cost multipurpose lab equipment. Behav. Res. Methods 2012, 44, 305–313. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3. [Google Scholar]
- Nagy, T.D.; Ukhrenkov, N.; Drexler, D.A.; Takács, A.; Haidegger, T. Enabling quantitative analysis of situation awareness: System architecture for autonomous vehicle handover studies. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 914–918. [Google Scholar]
- Chen, Z.; Deguet, A.; Taylor, R.H.; Kazanzides, P. Software Architecture of the Da Vinci Research Kit. In Proceedings of the IEEE International Conference on Robotic Computing (IRC), Taichung City, Taiwan, 10–12 April 2017; pp. 180–187. [Google Scholar] [CrossRef]
- Kim, T.K. T test as a parametric statistic. Korean J. Anesthesiol. 2015, 68, 540–546. [Google Scholar] [CrossRef]
- Pearson, K. VII. Mathematical contributions to the theory of evolution—III. Regression, heredity, and panmixia. In Philosophical Transactions of the Royal Society of London; Series A, Containing Papers of a Mathematical or Physical Character; The Royal Society: London, UK, 1896; pp. 253–318. [Google Scholar]
- Wickens, C.D. Situation awareness: Review of Mica Endsley’s 1995 articles on situation awareness theory and measurement. Hum. Factors 2008, 50, 397–403. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Routledge: London, UK, 2013. [Google Scholar]
- Holland, P.W.; Welsch, R.E. Robust regression using iteratively reweighted least-squares. Commun. Stat. Theory Methods 1977, 6, 813–827. [Google Scholar] [CrossRef]
- Russell, H.E.; Harbott, L.K.; Nisky, I.; Pan, S.; Okamura, A.M.; Gerdes, J.C. Motor learning affects car-to-driver handover in automated vehicles. Sci. Robot. 2016, 1, eaah5682. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before the Experiment | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
|
|
|
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Levendovics, T.; Drexler, D.A.; Ukhrenkov, N.; Takács, Á.; Haidegger, T. Quantitative Analysis of Situation Awareness During Autonomous Vehicle Handover on the Da Vinci Research Kit. Sensors 2025, 25, 3514. https://doi.org/10.3390/s25113514
Levendovics T, Drexler DA, Ukhrenkov N, Takács Á, Haidegger T. Quantitative Analysis of Situation Awareness During Autonomous Vehicle Handover on the Da Vinci Research Kit. Sensors. 2025; 25(11):3514. https://doi.org/10.3390/s25113514
Chicago/Turabian StyleLevendovics, Tamás, Dániel A. Drexler, Nikita Ukhrenkov, Árpád Takács, and Tamás Haidegger. 2025. "Quantitative Analysis of Situation Awareness During Autonomous Vehicle Handover on the Da Vinci Research Kit" Sensors 25, no. 11: 3514. https://doi.org/10.3390/s25113514
APA StyleLevendovics, T., Drexler, D. A., Ukhrenkov, N., Takács, Á., & Haidegger, T. (2025). Quantitative Analysis of Situation Awareness During Autonomous Vehicle Handover on the Da Vinci Research Kit. Sensors, 25(11), 3514. https://doi.org/10.3390/s25113514