

Time Series Analysis of Muscle Deformation During Physiotherapy Using Optical Wearable Sensors


Abstract
1. Introduction
1.1. Background
1.2. Related Works
1.3. Objective
2. Materials and Methods
2.1. Participants
2.2. Equipment
- (A)
- Upper limb raising exercise:The starting position of the experiment was set with the elbow joint of the human model extended and in contact with the bed. The arrival position was set at the 90° shoulder joint of the human model. The end position of the movement was the same as the start position. The subject was instructed to grasp the following parts of the human model. The subject held the proximal shoulder joint of the human model with the left hand from the ventral side and the distal forearm with the right hand from the dorsal side. The subjects were instructed to position their lower limb for the task so that they were comfortable.
- (B)
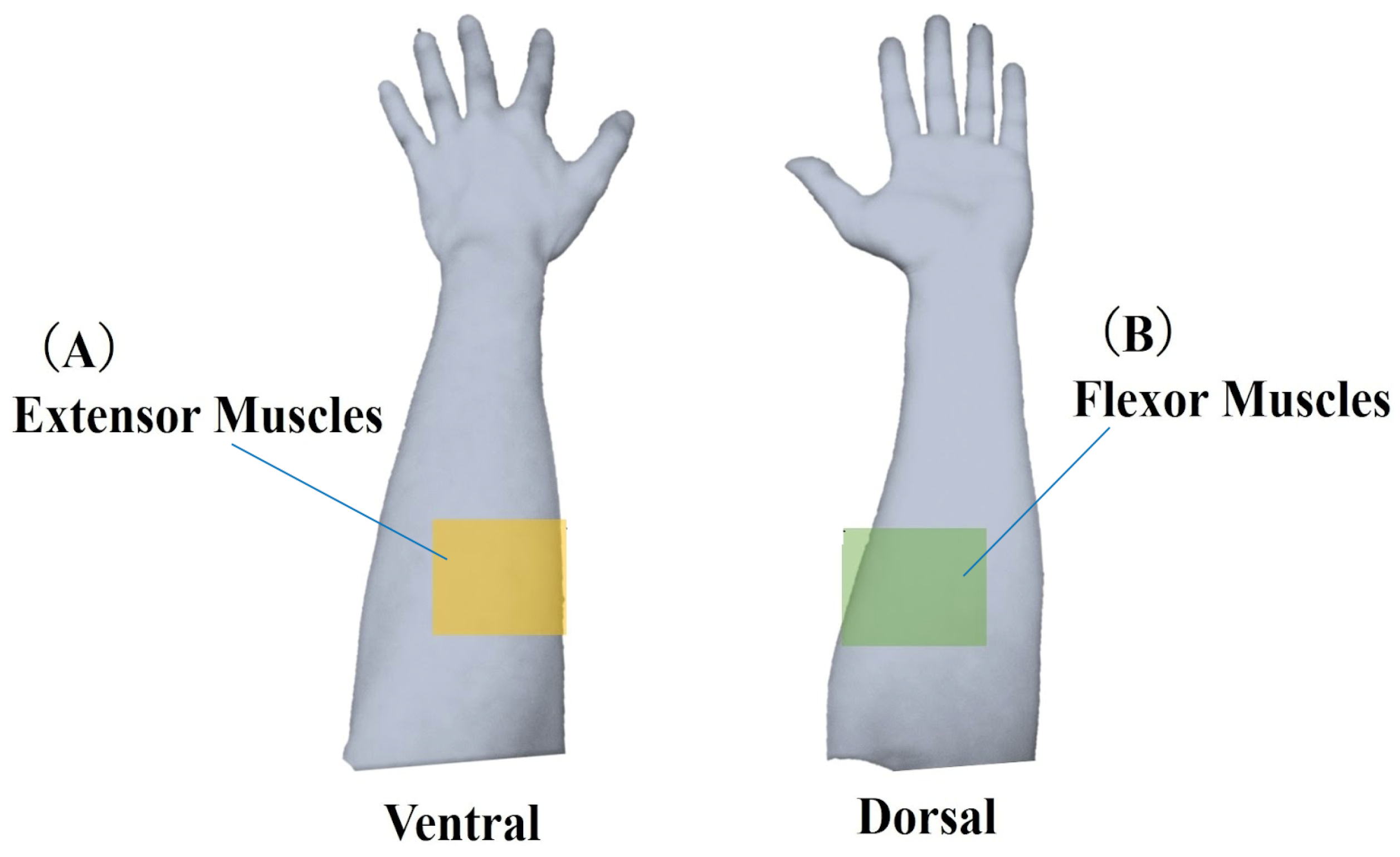
- Lower limb flexion exercise:The experiment’s starting position was where the lower limb of the human model was in contact with the bed in an extended position. The position reached was 90° hip flexion. The end position was set to the same as the start position. The part of the human body model to be grasped by the subject was specified as follows. The subject grasped the thigh of the human model with the left hand from the dorsal side and the distal shank with the right hand from the ventral side. The position of the subject’s lower limb remained the same as in the upper limb raising exercise. One experimenter experimented on this.In this study, an OMG sensor, the muscle deformation sensor array FirstVR (H2L Inc., Tokyo, Japan), shown in Figure 3 [30], was used. The muscle deformation sensor array contains 14 optical muscle deformation sensors. It can optically measure muscle bulge (muscle deformation) and estimate intrinsic sensation. The device is also equipped with a gyro sensor and a 3-axis acceleration sensor, making it possible to acquire quaternion data (posture data of the part of the body wearing the device). The device can be worn by wrapping it around the forearm like a wristwatch to measure muscle deformation in the forearm and fingers [31]. It can also be worn on the lower leg to measure the deformation of the lower leg muscles [32] or placed on the neck to measure the neck muscles [33]. The readings were transmitted from FirstVR to the PC via Bluetooth Low Energy. The sampling frequency for the data recording was approximately 50 Hz.
2.3. Analysis Method
2.3.1. Data Pretreatment
2.3.2. Analysis Method
2.4. Ethical Considerations
3. Results
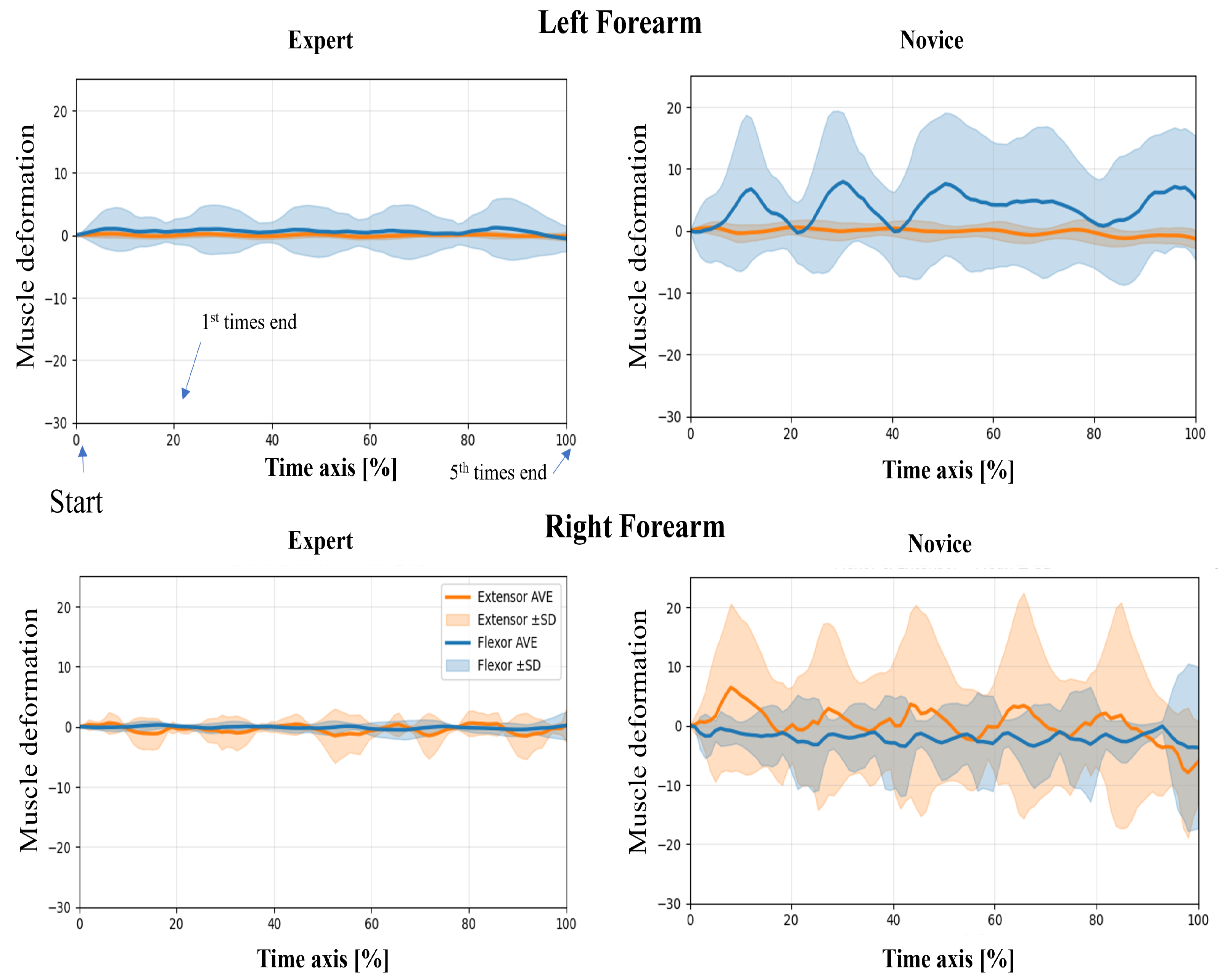
3.1. Time Series of Muscle Deformation Data
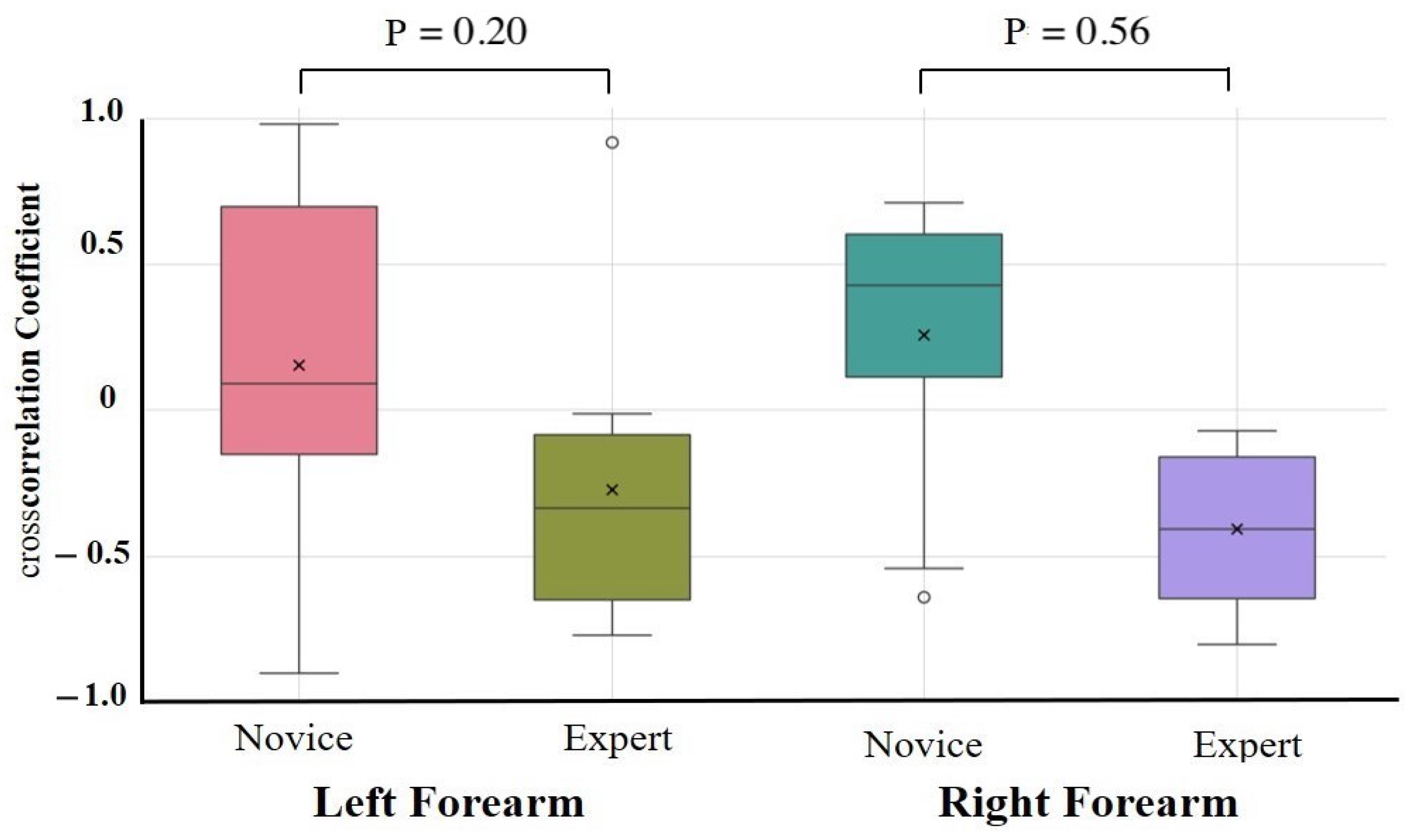
3.2. Covariate-Adjusted Group Comparison (ANCOVA)
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ometov, A.; Shubina, V.; Klus, L.; Skibińska, J.; Saafi, S.; Pascacio, P. A survey on wearable technology: History, state-of-the-art and current challenges. Comput. Netw. 2021, 193, 108074. [Google Scholar] [CrossRef]
- Franchi de’Cavalieri, M.; Filogna, S.; Martini, G.; Beani, E.; Maselli, M.; Cianchetti, M. Wearable accelerometers for measuring and monitoring the motor behaviour of infants with brain damage during CareToy-Revised training. J. Neuroeng. Rehabil. 2023, 20, 62. [Google Scholar] [CrossRef]
- Li, R.T.; Kling, S.R.; Salata, M.J.; Cupp, S.A.; Sheehan, J.; Voos, J.E. Wearable performance devices in sports medicine. Sport. Health 2016, 8, 74–78. [Google Scholar] [CrossRef] [PubMed]
- Seçkin, A.Ç.; Ateş, B.; Seçkin, M. Review on Wearable Technology in sports: Concepts, Challenges and opportunities. Appl. Sci. 2023, 13, 10399. [Google Scholar] [CrossRef]
- Porciuncula, F.; Roto, A.V.; Kumar, D.; Davis, I.; Roy, S.; Walsh, C.J.; Awad, L.N. Wearable movement sensors for rehabilitation: A focused review of technological and clinical advances. PM&R 2018, 10, S220–S232. [Google Scholar]
- Wang, C.; Tang, M.; Xiao, K.; Wang, D.; Li, B. Optimization system for training efficiency and load balance based on the fusion of heart rate and inertial sensors. Prev. Med. Rep. 2024, 41, 102710. [Google Scholar] [CrossRef]
- Reddy, R.K.; Pooni, R.; Zaharieva, D.P.; Senf, B.; El Youssef, J.; Dassau, E. Accuracy of wrist-worn activity monitors during common daily physical activities and types of structured exercise: Evaluation study. JMIR mHealth uHealth 2018, 6, e10338. [Google Scholar] [CrossRef]
- Nakagata, T.; Yamada, Y.; Taniguchi, M.; Nanri, H.; Kimura, M.; Miyachi, M.; Ono, R. Comparison of step-count outcomes across seven different activity trackers: A free-living experiment with young and older adults. BMC Sport. Sci. Med. Rehabil. 2024, 16, 156. [Google Scholar] [CrossRef] [PubMed]
- Mandigout, S.; Lacroix, J.; Perrochon, A.; Svoboda, Z.; Aubourg, T.; Vuillerme, N. Comparison of step count assessed using wrist-and hip-worn Actigraph GT3X in free-living conditions in young and older adults. Front. Med. 2019, 6, 252. [Google Scholar] [CrossRef]
- De Fazio, R.; Mastronardi, V.M.; De Vittorio, M.; Visconti, P. Wearable sensors and smart devices to monitor rehabilitation parameters and sports performance: An overview. Sensors 2023, 23, 1856. [Google Scholar] [CrossRef]
- Snodgrass, S.J.; Rivett, D.A.; Robertson, V.J.; Stojanovski, E. A comparison of cervical spine mobilization forces applied by experienced and novice physiotherapists. J. Orthop. Sport. Phys. Ther. 2010, 40, 392–401. [Google Scholar] [CrossRef] [PubMed]
- Dias, D.; Paulo Silva Cunha, J. Wearable health devices—Vital sign monitoring, systems and technologies. Sensors 2018, 18, 2414. [Google Scholar] [CrossRef]
- Papazian, C.; Baicoianu, N.A.; Peters, K.M.; Feldner, H.A.; Steele, K.M. Electromyography recordings detect muscle activity before observable contractions in acute stroke care. Arch. Rehabil. Res. Clin. Transl. 2021, 3, 100136. [Google Scholar] [CrossRef] [PubMed]
- Lirio-Romero, C.; Torres-Lacomba, M.; Gómez-Blanco, A.; Acero-Cortés, A.; Retana-Garrido, A.; de la Villa-Polo, P.; Sánchez-Sánchez, B. Electromyographic biofeedback improves upper extremity function: A randomized, single-blinded, controlled trial. Physiotherapy 2021, 110, 54–62. [Google Scholar] [CrossRef]
- Liu, X.K.; Qu, Y.; Tajiri, K.; Zhou, P.; Huo, M. Integrating surface electromyography into physical therapy training with the support of STEM education. Front. Neurol. 2024, 15, 1501619. [Google Scholar] [CrossRef] [PubMed]
- Bootsman, R.; Markopoulos, P.; Qi, Q.; Wang, Q.; Timmermans, A.A. Wearable technology for posture monitoring at the workplace. Int. J.-Hum.-Comput. Stud. 2019, 132, 99–111. [Google Scholar] [CrossRef]
- Shahmohammadi, M.; Guan, B.; Godoy, R.V.; Dwivedi, A.; Nielsen, P.; Liarokapis, M. On lightmyography based muscle-machine interfaces for the efficient decoding of human gestures and forces. Sci. Rep. 2023, 13, 327. [Google Scholar] [CrossRef]
- Franco, J.; Stuttaford, S.; Degenaar, P.; Dyson, M. Optical Sensing of Muscle Activity. In Proceedings of the MEC24: Myoelectric Controls Symposium 2024, Fredericton, NB, Canada, 12–15 August 2024. [Google Scholar]
- Shimabukuro, S.; Miyake, T.; Tamaki, E. Analyzing the Differences in the Degree of Force Application Between Novice and Expert Physiotherapists Using a Muscle Deformation Sensor. Cureus 2024, 16, 1–14. [Google Scholar] [CrossRef]
- Ilgen, J.S.; Ma, I.W.; Hatala, R.; Cook, D.A. A systematic review of validity evidence for checklists versus global rating scales in simulation-based assessment. Med. Educ. 2015, 49, 161–173. [Google Scholar] [CrossRef]
- Gittinger, F.P.; Lemos, M.; Neumann, J.L.; Förster, J.; Dohmen, D.; Berke, B.; Olmeo, A.; Lucas, G.; Jonas, S.M. Interrater reliability in the assessment of physiotherapy students. BMC Med. Educ. 2022, 22, 186. [Google Scholar] [CrossRef]
- Gagnon, D.; Plamondon, A.; Larivière, C. A biomechanical comparison between expert and novice manual materials handlers using a multi-joint EMG-assisted optimization musculoskeletal model of the lumbar spine. J. Biomech. 2016, 49, 2938–2945. [Google Scholar] [CrossRef] [PubMed]
- Abu Owida, H.; De Fazio, R.; Al-Naami, B.; Visconti, P. Electromyography monitoring systems in rehabilitation: A review of clinical applications, wearable devices and signal acquisition methodologies. Electronics 2023, 12, 1520. [Google Scholar] [CrossRef]
- Negro, F.; Hu, X.; Yao, J. Editorial: Understanding Altered Muscle Activation After Central or Peripheral Neuromuscular Injuries. Front. Neurol. 2021, 12, 642207. [Google Scholar] [CrossRef]
- Zhang, L.; Schöner, G. Estimating descending activation patterns from EMG in fast and slow movements using a model of the stretch reflex. J. Neurophysiol. 2025, 133, 162–176. [Google Scholar] [CrossRef]
- Reaz, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG signal analysis: Detection, processing, classification and applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef]
- Kim, J.; Mastnik, S.; André, E. EMG-based hand gesture recognition for realtime biosignal interfacing. In Proceedings of the 13th International Conference on Intelligent User Interfaces, Sanibel Island, FL, USA, 1–3 October 2008; pp. 30–39. [Google Scholar]
- Lee, J.; Kim, M.; Park, H.K.; Kim, I.Y. Motion artifact reduction in wearable photoplethysmography based on multi-channel sensors with multiple wavelengths. Sensors 2020, 20, 1493. [Google Scholar] [CrossRef] [PubMed]
- Thongma-Eng, P.; Amornvit, P.; Silthampitag, P.; Rokaya, D.; Pisitanusorn, A. Effect of Ambient Lights on the Accuracy of a 3-Dimensional Optical Scanner for Face Scans: An In Vitro Study. J. Healthc. Eng. 2022, 1, 2637078. [Google Scholar] [CrossRef]
- Tamaki, E.; Hosono, S.; Iwasaki, K. Firstvr: A muscle deformation sensors array device to detect finger gestures and noise reduction case. In Proceedings of the 2019 2nd International Conference on Electronics, Communications and Control Engineering, Phuket, Thailand, 13–16 April 2019; pp. 21–24. [Google Scholar]
- Miyake, T.; Minakuchi, T.; Sato, S.; Okubo, C.; Yanagihara, D.; Tamaki, E. Optical myography-based sensing methodology of application of random loads to muscles during hand-gripping training. Sensors 2024, 24, 1108. [Google Scholar] [CrossRef]
- Miyake, T.; Yamamoto, S.; Hosono, S.; Funabashi, S.; Cheng, Z.; Zhang, C.; Tamaki, E.; Sugano, S. Gait phase detection based on muscle deformation with static standing-based calibration. Sensors 2021, 21, 1081. [Google Scholar] [CrossRef]
- Shimabukuro, S.; Arashiro, R.; Tamaki, E. Noninvasive Visualization of Muscles During Swallowing Using a Muscle Deformation Sensor. MCCSIS 2024, 157. [Google Scholar]
- Nelson-Wong, E.; Howarth, S.; Winter, D.A.; Callaghan, J.P. Application of autocorrelation and cross-correlation analyses in human movement and rehabilitation research. J. Orthop. Sports Phys. Ther. 2009, 39, 287–295. [Google Scholar] [CrossRef] [PubMed]
- McDonald, C.; El Yaakoubi, N.A.; Lennon, O. Brain (EEG) and muscle (EMG) activity related to 3D sit-to-stand kinematics in healthy adults and in central neurological pathology: A systematic review. Gait Posture 2024, 113, 374–397. [Google Scholar] [CrossRef] [PubMed]
- Fang, C.; He, B.; Wang, Y.; Cao, J.; Gao, S. EMG-centered multisensory based technologies for pattern recognition in rehabilitation: State of the art and challenges. Biosensors 2020, 10, 85. [Google Scholar] [CrossRef] [PubMed]
- Miyake, S.; Miyake, T. Force Estimation of Five Fingers Using Infrared Optical Sensors and an IMU and its Application to Analysis of Sports Motion. IEEE Sens. J. 2025, 6, 10122–10133. [Google Scholar] [CrossRef]
- Frisoli, A.; Leonardis, D. Wearable haptics for virtual reality and beyond. Nat. Rev. Electr. Eng. 2024, 1, 666–679. [Google Scholar] [CrossRef]
- Holden, M.K.; Todorov, E. Use of virtual environments in motor learning and rehabilitation. In Handbook of Virtual Environments; CRC Press: Boca Raton, FL, USA, 2002; pp. 1039–1066. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Novice (n = 10) | Expert (n = 10) | p-Value | |||
|---|---|---|---|---|---|
| Age | (years old) | 19 ± 2.2 | 39.2 ± 5.2 | 0.0001 | |
| Sex | (male/female) | 7/3 | 9/1 | 0.5820 | |
| Height | (cm) | 163.3 ± 9.5 | 167.6 ± 6.5 | 0.2564 | |
| Body weight | (kg) | 57.5 ± 9.2 | 67.2 ± 12.8 | 0.0680 | |
| Experience | (years) | 15.3 ± 3.7 | |||
| Novice (n = 10) | Expert (n = 10) | F | Partial | 95% CI (Lower–Upper) | ||||
|---|---|---|---|---|---|---|---|---|
| ULR-ex | Left | EX | 0.39 ± 0.2 | 0.39 ± 0.2 | 0.05 | 0.83 | 0.00 | −0.71–0.65 |
| FL | 0.36 ± 0.1 | 0.39 ± 0.1 | 0.12 | 0.74 | 0.04 | −0.30–0.62 | ||
| Right | EX | 0.40 ± 0.2 | 0.39 ± 0.1 | 0.20 | 0.66 | 0.04 | −0.56–0.34 | |
| FL | 0.32 ± 0.1 | 0.42 ± 0.1 | 0.06 | 0.81 | 0.18 | −0.82–0.67 | ||
| LLF-ex | Left | EX | 0.39 ± 0.2 | 0.41 ± 0.1 | 0.80 | 0.39 | 0.00 | −0.27–0.72 |
| FL | 0.36 ± 0.1 | 0.34 ± 0.2 | 0.04 | 0.84 | 0.06 | −0.55–0.56 | ||
| Right | EX | 0.33 ± 0.2 | 0.45 ± 0.1 | 2.89 | 0.11 | 0.18 | −0.09–0.87 | |
| FL | 0.41 ± 0.2 | 0.46 ± 0.1 | 0.71 | 0.42 | 0.04 | −0.22–0.70 |
| Novice (n = 10) | Expert (n = 10) | F | Partial | 95% CI (Lower–Upper) | |||
|---|---|---|---|---|---|---|---|
| ULR-ex | Left | 0.16 ± 0.6 | −0.27 ± 0.5 | 1.84 | 0.20 | 0.26 | −1.75–0.58 |
| Right | 0.26 ± 0.5 | −0.41 ± 0.3 | 0.35 | 0.56 | 0.45 | −1.75–1.09 | |
| LLF-ex | Left | 0.23 ± 0.6 | −0.21 ± 0.5 | 1.52 | 0.24 | 0.19 | −2.54–0.95 |
| Right | 0.15 ± 0.7 | −0.23 ± 0.5 | 1.11 | 0.31 | 0.12 | −2.74–0.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shimabukuro, S.; Miyake, T.; Tamaki, E. Time Series Analysis of Muscle Deformation During Physiotherapy Using Optical Wearable Sensors. Sensors 2025, 25, 3507. https://doi.org/10.3390/s25113507
Shimabukuro S, Miyake T, Tamaki E. Time Series Analysis of Muscle Deformation During Physiotherapy Using Optical Wearable Sensors. Sensors. 2025; 25(11):3507. https://doi.org/10.3390/s25113507
Chicago/Turabian StyleShimabukuro, Satoshi, Tamon Miyake, and Emi Tamaki. 2025. "Time Series Analysis of Muscle Deformation During Physiotherapy Using Optical Wearable Sensors" Sensors 25, no. 11: 3507. https://doi.org/10.3390/s25113507
APA StyleShimabukuro, S., Miyake, T., & Tamaki, E. (2025). Time Series Analysis of Muscle Deformation During Physiotherapy Using Optical Wearable Sensors. Sensors, 25(11), 3507. https://doi.org/10.3390/s25113507