
Theoretical and Numerical Analysis of Impact Forces on Blocking Piles Within Embankment Breaches Using Flow Velocity Signals



Abstract
1. Introduction
2. Numerical Calculation Method for the Impact Force of Embankment Breach Flow on Plugging Structures
2.1. Two-Dimensional Shallow Water Equation
2.2. Solution of the 2D Shallow Water Equations Based on the Godunov Scheme
2.2.1. Grid Division and Boundary Conditions
2.2.2. Solution of Riemann’s Problem
2.2.3. Second-Order Correction of the Godunov Scheme
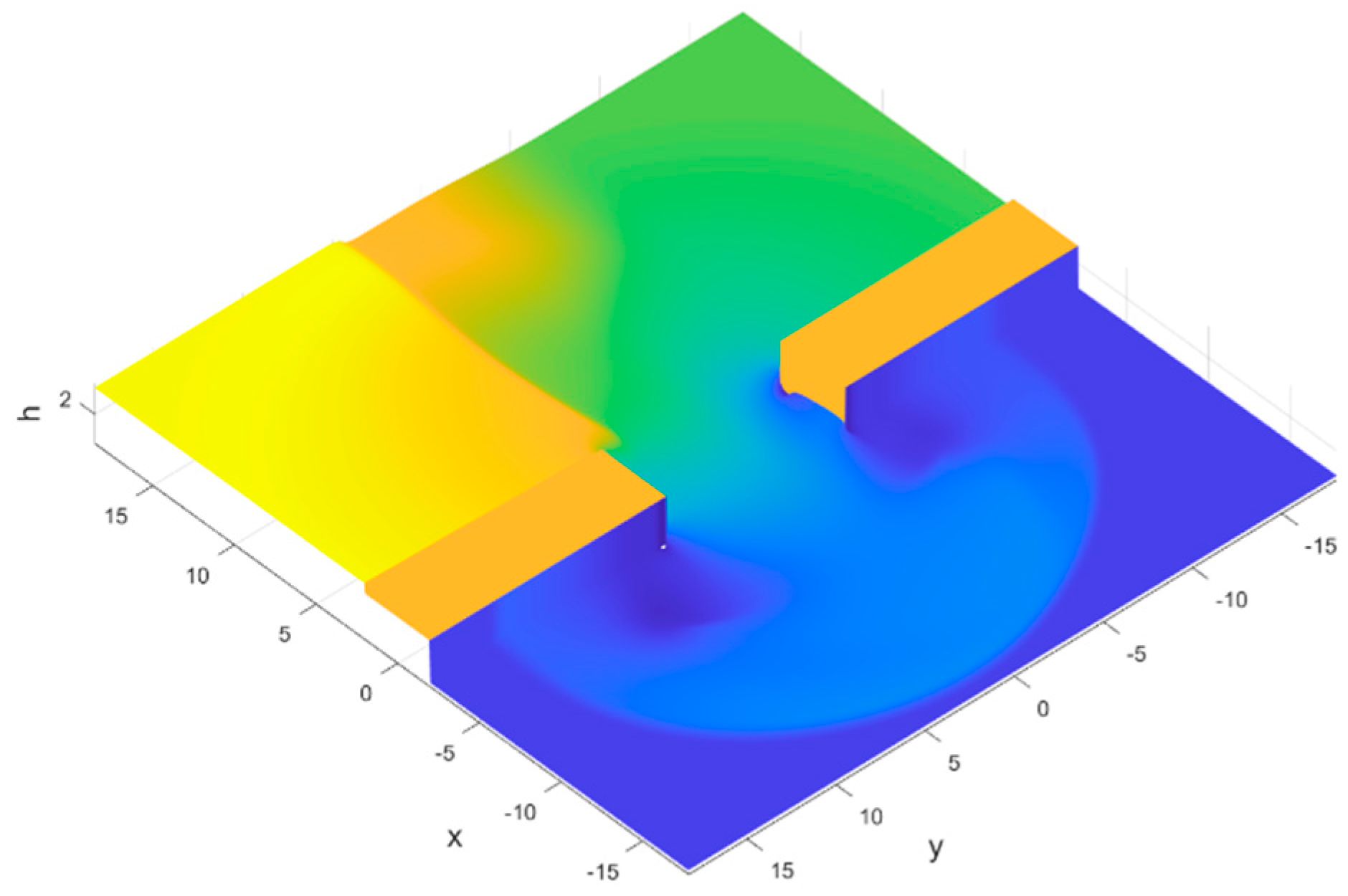
2.2.4. MATLAB Calculation Method for Hydraulic Characteristics of Embankment Breach
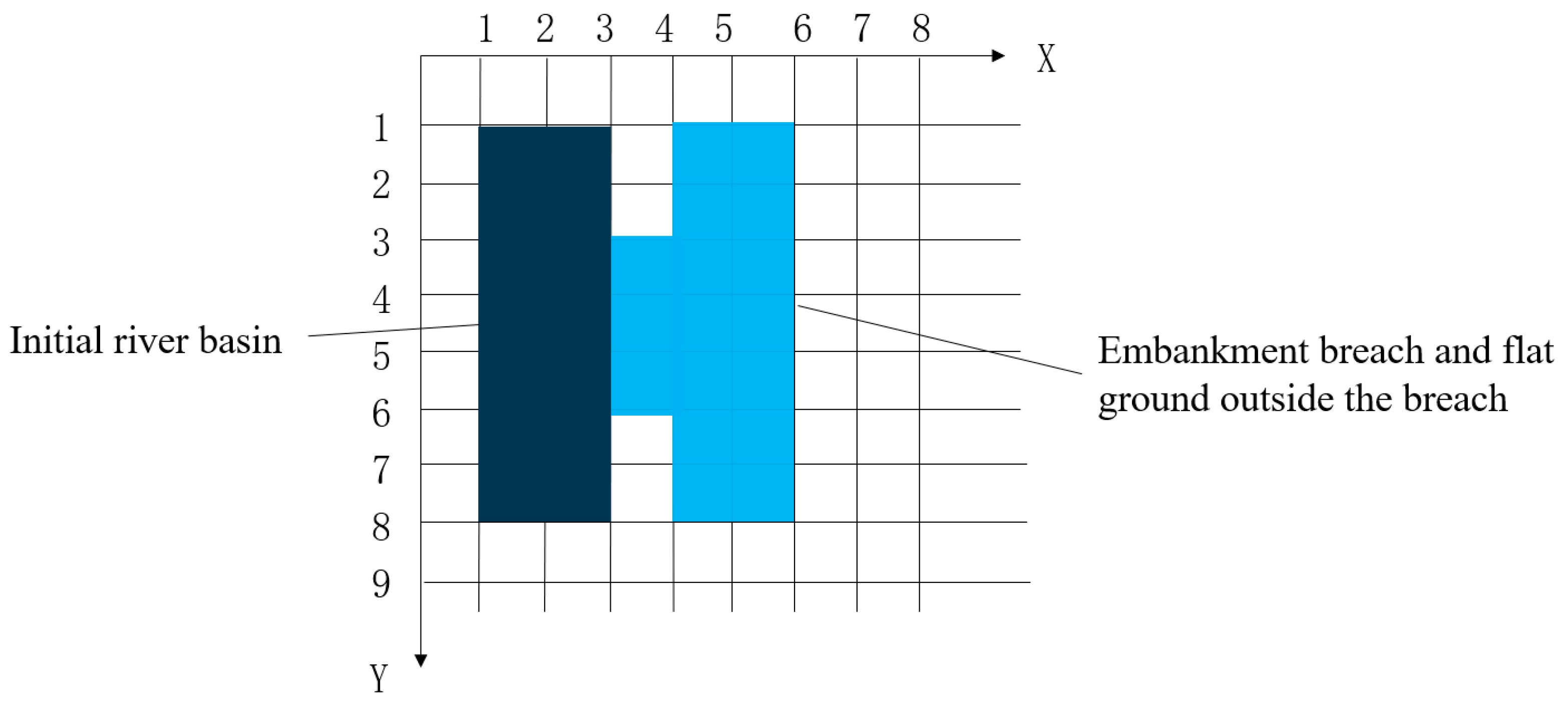
- Establish parameter models for river channels and breaches. Determine the grid size and store the boundary coordinates and center coordinates of each grid to determine the total calculation time T.
- Set the number of CFLs (Courant numbers). The CFL number is used to control the selection of time steps in numerical solutions to ensure the stability and convergence of numerical solutions. The convergence conditions required for the calculation of 2D shallow water equations are [38]:
- where h is the initial depth of the river, and are the velocities in the X and Y directions, is the grid width, where the grid sizes in both directions are the same, and is the time step size, where the value of is 0.8. Determine the time step size based on .
- Establish a computational domain. Establish control parameters such as u, v, h for each grid, and initialize them. Set initial flow velocity, river depth, flat height outside of the breach, breach width, and other initial parameter conditions for the river and breach.
- Calculate the flux of the unit X interface, Y interface, and boundary based on Roe format. Then, calculate new U, F, G, h, u, v values, and continuously advance the time step until the total calculation time T is reached, and end the operation.
- During the calculation process, continuously draw the velocity and water depth values of the target cross-section at each moment in the X and Y coordinates.
3. Numerical Simulation for the Impact Force of Embankment Breach Flow on Plugging Structures
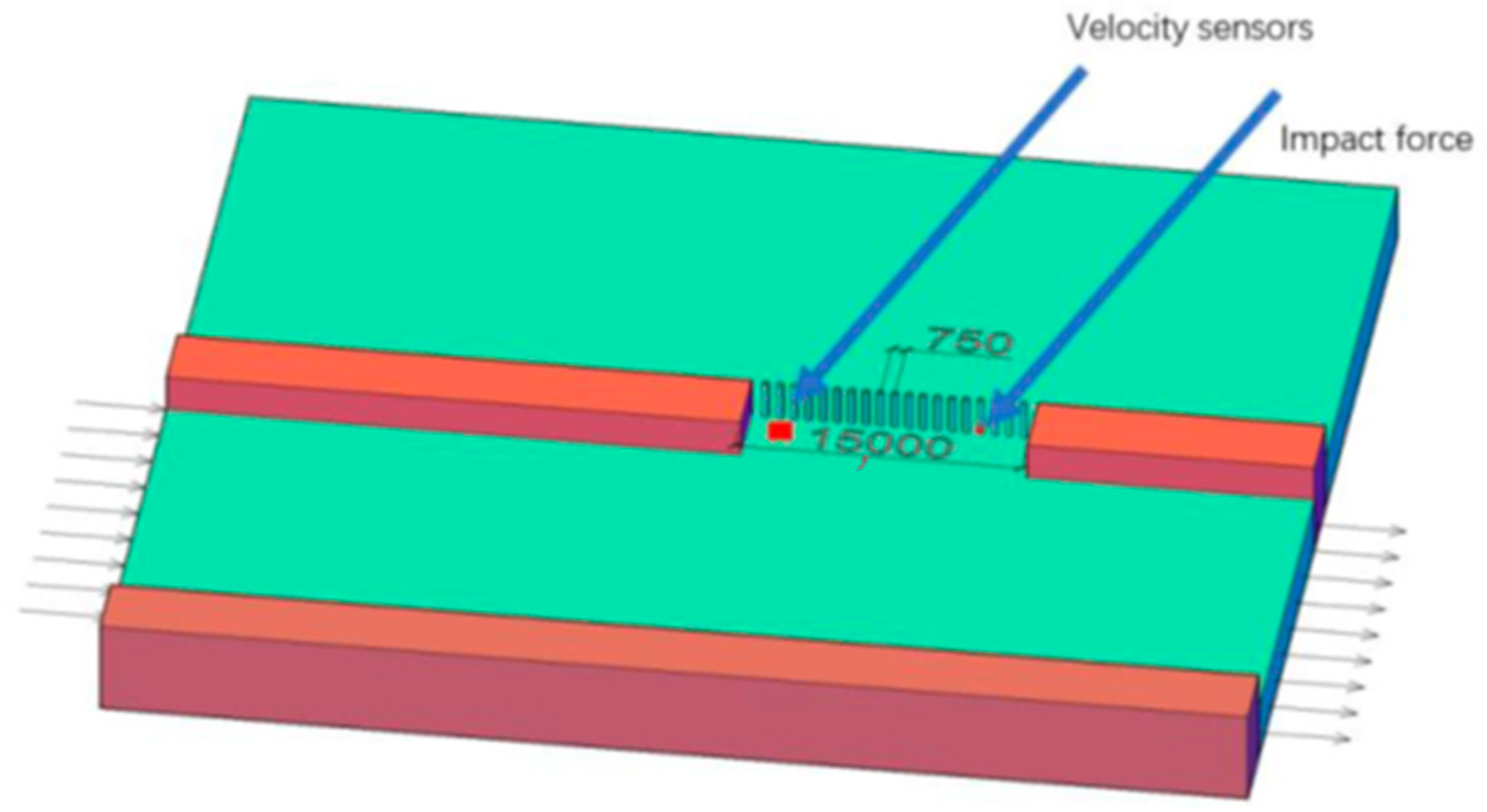
3.1. Establishment of Finite Element Model for 3D Embankment Breach Water Flow Prediction
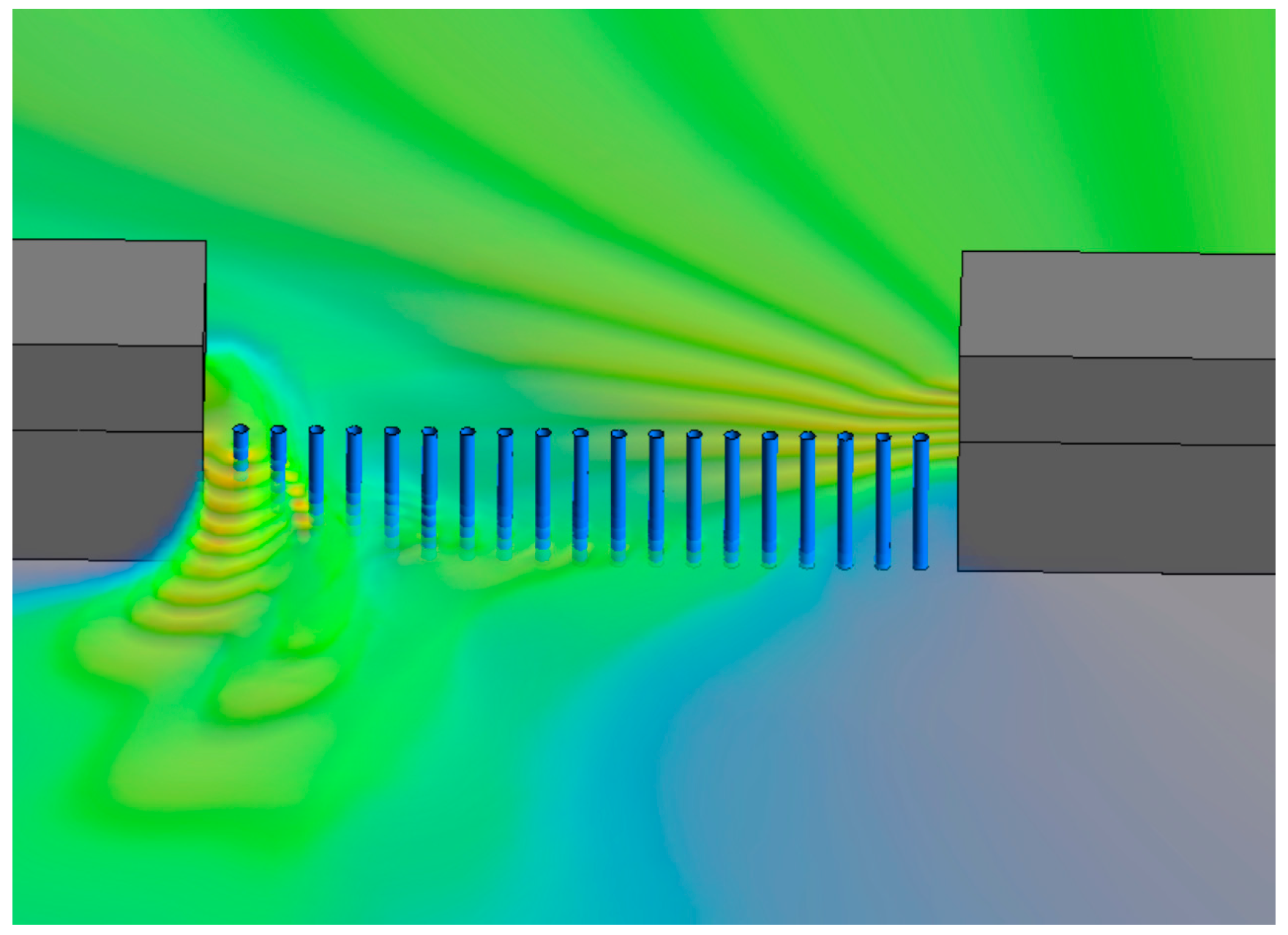
3.2. Simulation of Water Flow Development During the Process of Water Flow Impact Plugging Structure
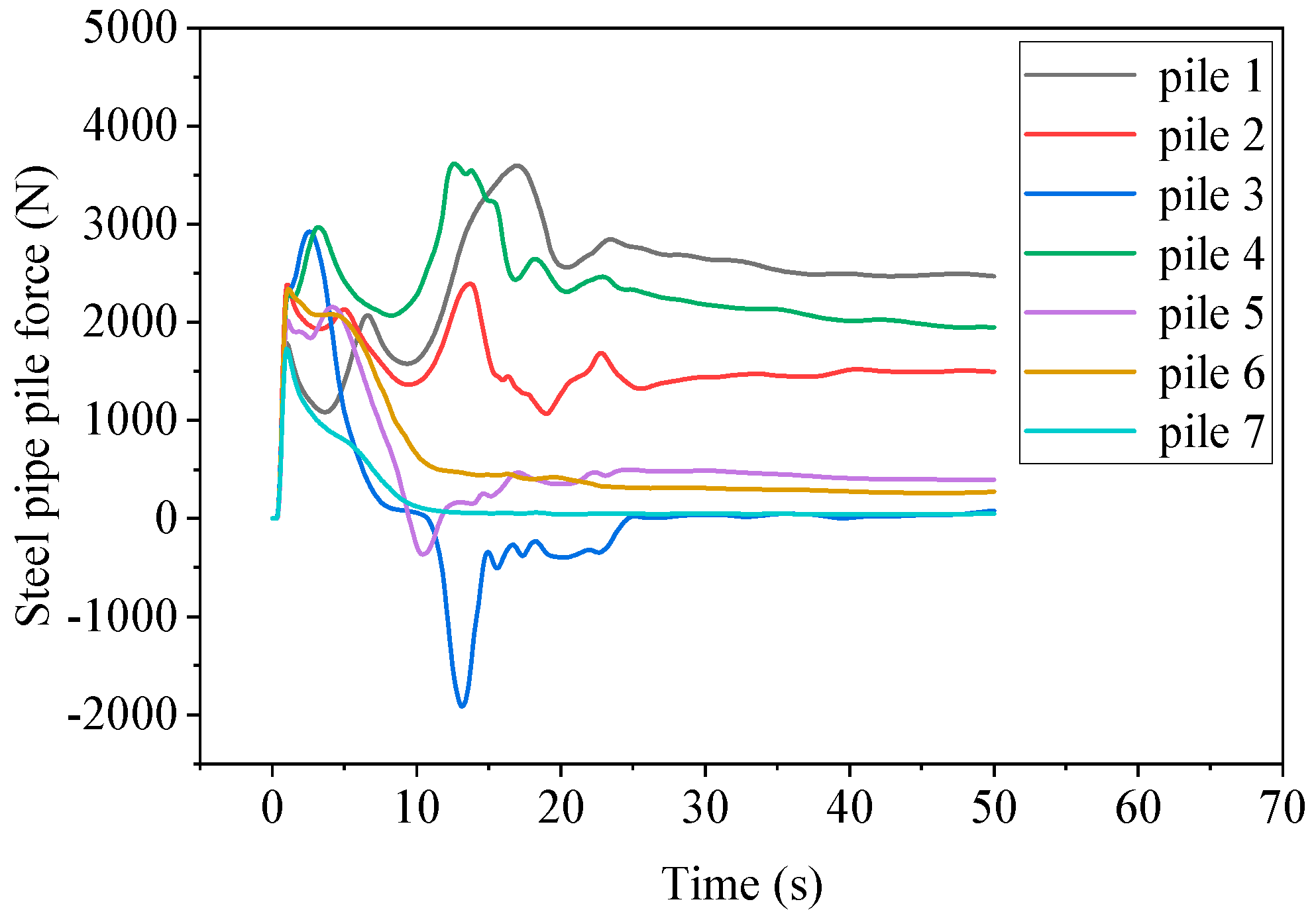
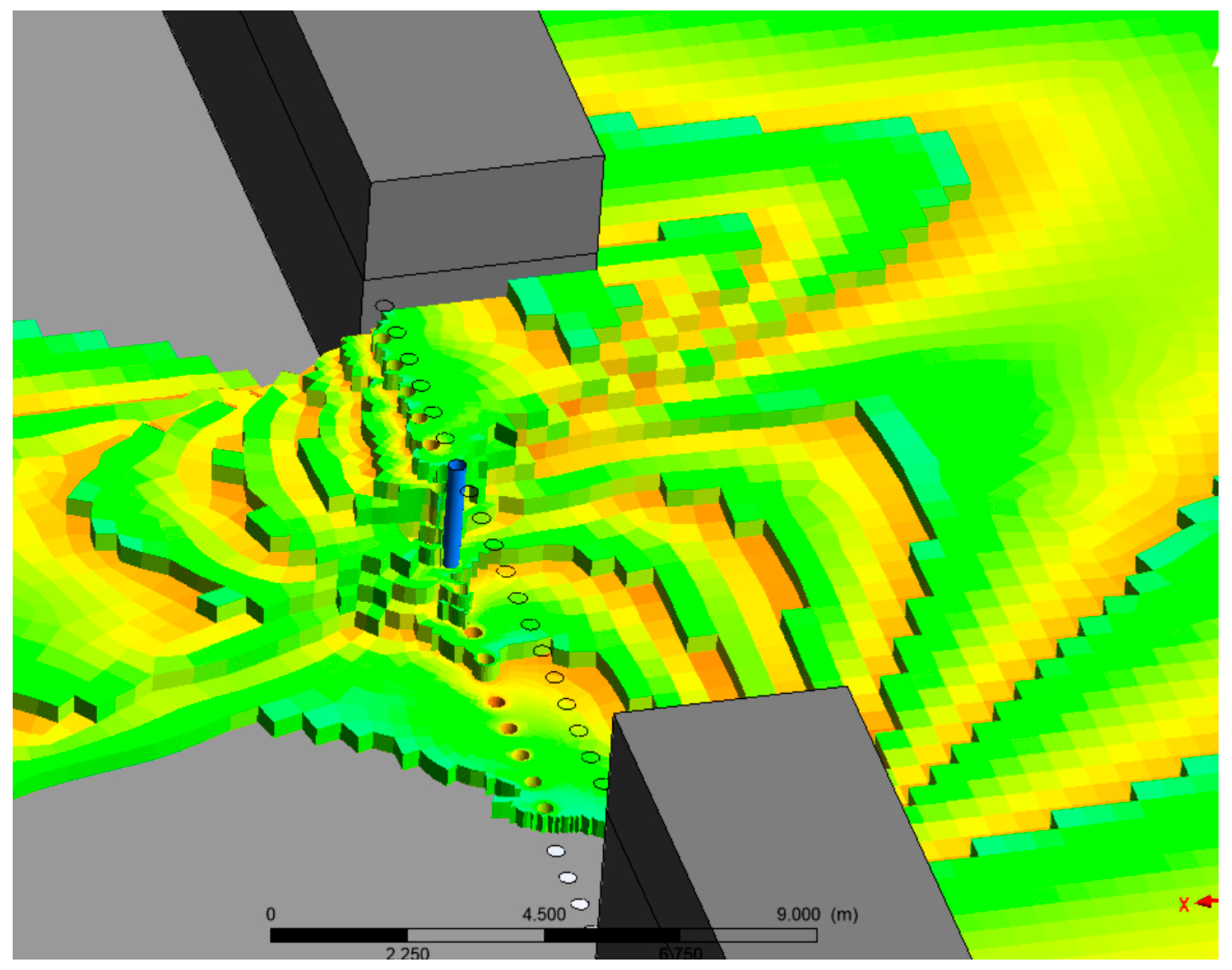
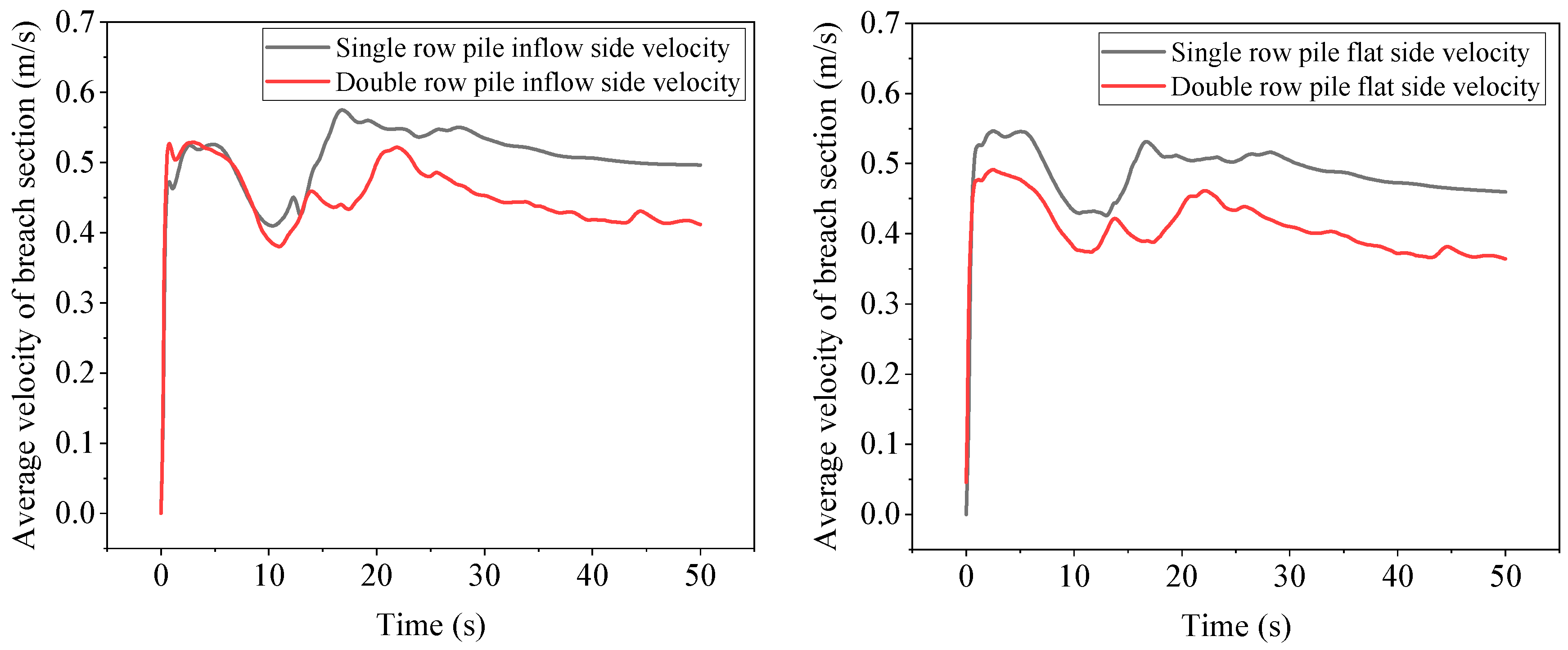
3.3. Analysis of Water Flow Impact Process on Single-Row Steel Pipe Piles
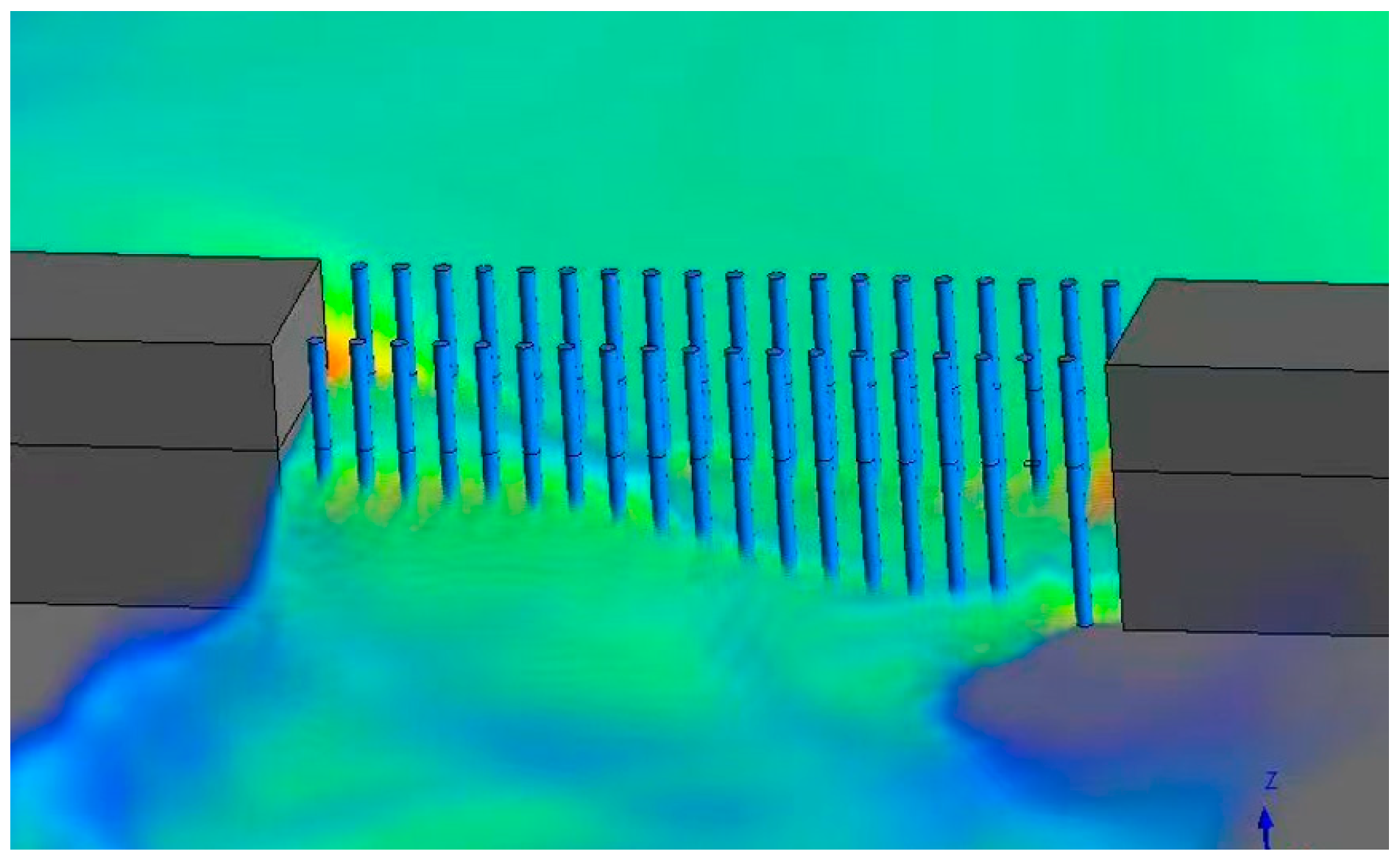
3.4. Analysis of Water Flow Impact Process on Double-Row Steel Pipe Piles
4. Result and Discussion
4.1. Verification of Numerical Method for Water Flow Impact Force in Plugging Structures
4.2. Three-Dimensional Simulation Results of the Water Flow Impact Force on the Plugging Structure
4.2.1. At Different Initial Flow Rates
4.2.2. At Different Pile Inclination Angles
4.3. The Rapid Calculation of Water Flow Impact Force Based on Flow Velocity Sensing Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hien, L.T.T.; Van Chien, N. Numerical Study of Partial Dam–Break Flow with Arbitrary Dam Gate Location Using VOF Method. Appl. Sci. 2022, 12, 3884. [Google Scholar]
- Xu, Z.D.; Shen, Y.P.; Guo, Y.Q. Semi-active control of structures incorporated with magnetorheological dampers using neural networks. Smart Mater. Struct. 2003, 12, 80–87. [Google Scholar] [CrossRef]
- Xu, Y.S.; Xu, Z.; Guo, Y.Q.; Huang, X.H.; Hu, Z.W.; Dong, Y.R.; Shah, A.A.; Dai, J.; Xu, C. Investigation of the dynamic properties of viscoelastic dampers with three-chain micromolecular configurations and tube constraint effects. J. Aerosp. Eng. ASCE 2025, 38, 04024122. [Google Scholar] [CrossRef]
- Liu, X.Y.; Xu, Z.; Huang, X.H.; Tao, Y.; Du, X.; Miao, Q. Seismic response analysis of three-dimensional base isolation structures considering rocking and P-Δ effects. Eng. Struct. 2025, 328, 119689. [Google Scholar] [CrossRef]
- Xu, Z.; Shen, Y.P. Intelligent bi-state control for the structure with magnetorheological dampers. J. Intell. Mater. Syst. Struct. 2003, 14, 35–42. [Google Scholar] [CrossRef]
- Hu, Z.W.; Xu, Z.D.; Zhang, L.Y.; He, J.X.; Chen, Z.H.; Miao, Q.S.; Li, W.F. Full-scale shaking table test on a precast sandwich wall panel structure with a high-damping viscoelastic isolation and mitigation device. Eng. Struct. 2025, 329, 119797. [Google Scholar] [CrossRef]
- Tao, Y.; Xu, Z.D.; Wei, Y.; Liu, X.-Y.; Dong, Y.R.; Dai, J. Integrating deep learning into an energy framework for rapid regional damage assessment and fragility analysis under Mainshock-Aftershock sequences. Earthq. Eng. Struct. Dyn. 2025, 54, 1678–1697. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, Z.; Zhou, Y.; Lu, X. Nonlinear dissipative devices in structural vibration control: A review. J. Sound Vib. 2018, 423, 18–49. [Google Scholar] [CrossRef]
- Yao, R.; Xu, Y.; Zhang, R.; Zhang, Y.; Zhou, J. Unbalance compensation based on speed fault-tolerance and fusion strategy for magnetically suspended PMSM. Mech. Syst. Signal Process. 2025, 224, 111991. [Google Scholar] [CrossRef]
- Zhou, Y.; Xu, Y.; Zhou, J. Numerical and experimental investigations on the dynamic behavior of a rotor-AMBs system considering shrink-fit assembly. Mech. Syst. Signal Process. 2025, 224, 111980. [Google Scholar] [CrossRef]
- Lobovsky, L.; Botia-Vera, E.; Castellana, F. Experimental investigation of dynamic pressure loads during dam break. J. Fluids Struct. 2014, 48, 407–434. [Google Scholar] [CrossRef]
- Kocaman, S.; Ozmen-Cagatay, H. Investigation of dam-break induced shock waves impact on a vertical wall. J. Hydrol. 2015, 525, 1–12. [Google Scholar] [CrossRef]
- Kuswandi, T.R. The use of dam break model to simulate tsunami run-up and scouring around a vertical cylinder. J. Appl. Fluid Mech. 2019, 12, 1395–1406. [Google Scholar] [CrossRef]
- Dumergue, L.E.; Abadie, S. Numerical study of the wave impacts generated in a wet dam break. J. Fluids Struct. 2022, 114, 103716. [Google Scholar] [CrossRef]
- Hien, L.T.T.; Van Chien, N. Investigate impact force of dam-break flow against structures by both 2D and 3D numerical simulations. Water 2021, 13, 344. [Google Scholar] [CrossRef]
- Zuo, J.; Xu, T.; Zhu, D.Z. Impact pressure of dam-break waves on a vertical wall with various downstream conditions by an explicit mesh-free method. Ocean Eng. 2022, 256, 111569. [Google Scholar] [CrossRef]
- Xu, Z.D.; Gai, P.P.; Zhao, H.Y.; Huang, X.H.; Lu, L.Y. Experimental and theoretical study on a building structure controlled by multi-dimensional earthquake isolation and mitigation devices. Nonlinear Dyn. 2017, 89, 723–740. [Google Scholar] [CrossRef]
- Hur, D.S.; Mizutani, N. Numerical estimation of the wave forces acting on a three-dimensional body on submerged breakwater. Coast. Eng. 2003, 47, 329–345. [Google Scholar] [CrossRef]
- Xu, Z.D.; Tu, Q.; Guo, Y.F. Experimental study on vertical performance of multi-dimensional earthquake isolation and mitigation devices for long-span reticulated structures. J. Vib. Control 2012, 18, 1971–1985. [Google Scholar] [CrossRef]
- Liu, H.; Wang, B.; Xue, L. Recent progress in wave-current loads on foundation structure with piles and cap. Appl. Math. Mech. 2013, 34, 1098–1109. [Google Scholar]
- Yang, Y.; Xu, Z.D.; Xu, Y.W.; Guo, Y.Q. Analysis on influence of the magnetorheological fluid microstructure on the mechanical properties of magnetorheological dampers. Smart Mater. Struct. 2020, 29, 115025. [Google Scholar] [CrossRef]
- An, H.; Cheng, L.; Zhao, M. Two-dimensional and three-dimensional simulations of oscillatory flow around a circular cylinder. Ocean Eng. 2015, 109, 270–286. [Google Scholar] [CrossRef]
- Xu, Z.D.; Zhu, C.; Shao, L.W. Damage identification of pipeline based on ultrasonic guided wave and wavelet denoising. J. Pipeline Syst. Eng. Pract. ASCE 2021, 21, 04021051. [Google Scholar] [CrossRef]
- Basic, J.; Degiuli, N.; Blagojevic, B. Lagrangian differencing dynamics for incompressible flows. J. Comput. Phys. 2022, 462, 111198. [Google Scholar] [CrossRef]
- Xu, Z.D.; Xu, F.-H.; Chen, X. Intelligent vibration isolation and mitigation of a platform by using MR and VE devices. J. Aerosp. Eng. ASCE 2016, 29, 04016010. [Google Scholar] [CrossRef]
- Beji, S. Applications of Morison’s equation to circular cylinders of varying cross-sections and truncated forms. Ocean Eng. 2019, 187, 106156. [Google Scholar] [CrossRef]
- Lu, Z.; Zhao, S.; Ma, C.; Dai, K. Experimental and analytical study on the performance of wind turbine tower attached with particle tuned mass damper. Eng. Struct. 2023, 294, 116784. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, J.; Guo, M. A thermal flexible rotor dynamic modelling for rapid prediction of thermo-elastic coupling vibration characteristics in non-uniform temperature fields. Appl. Math. Model. 2025, 138, 115751. [Google Scholar] [CrossRef]
- Vengatesan, V.; Varyani, K.S.; Barltrop, N. An experimental investigation of hydrodynamic coefficients for a vertical truncated rectangular cylinder due to regular and random waves. Ocean Eng. 2000, 27, 291–313. [Google Scholar] [CrossRef]
- Chen, H.J.; Sheng, Y.; Xu, C. Dynamic measurement and study of the bore pressureon a vertical square cylinder in Qian-tang River. J. Hydrodyn. 2006, 21, 411–417. (In Chinese) [Google Scholar]
- He, J. Numerical Simulation of Group Effect and Wave Forces on Offshore Wind Turbine Piles; South China University of Technology: Guangzhou, China, 2011. [Google Scholar]
- Saincher, S.; Sriram, V.; Agarwal, S. Experimental investigation of hydrodynamic loading induced by regular, steep non-breaking and breaking focused waves on a fixed and moving cylinder. Eur. J. Mech. B—Fluids 2022, 93, 42–64. [Google Scholar] [CrossRef]
- Xin, Z.; Li, X.; Li, Y. Coupled effects of wave and depth-dependent current interaction on loads on a bottom-fixed vertical slender cylinder. Coast. Eng. 2023, 183, 104304. [Google Scholar] [CrossRef]
- Ministry of Transport of the People’s Republic of China. Code of Hydrology for Harbor and Waterway; 2022 edition; China Communications Press: Beijing, China, 2022. [Google Scholar]
- API PUBL 758 SEC 4-1981; Safety Digest of Lessons Learned, Section 4: Safety in Maintenance. American Petroleum Institute: Washington, DC, USA, 1981.
- Det Norske Veritas (DNV). Rules for the Design, Construction and Inspection of Fixed Offshore Platforms, 2nd ed.; Det Norske Veritas: Oslo, Norway, 1974. [Google Scholar]
- China Classification Society. Rules for the Classification and Construction of Sea-Going Steel Ships; China Classification Society: Beijing, China, 1982. [Google Scholar]
- Youssef, L.; Azzeddine, S. Numerical tracking of shallow water waves by the unstructured finite volume WAF approximation. Int. J. Comput. Methods Eng. Sci. Mech. 2007, 8, 75–88. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| National Regulations | Wave Theory | ||
|---|---|---|---|
| Hydrological specifications for ports and water-ways (2022 edition) [34] | Linear wave theory | 1.2 | 2.0 |
| American Petroleum Institute Specification (1981 edition) [35] | Stokes’ fifth order wave linear theory | 0.6–1.0 | 1.5–2.0 |
| Rules of the Det Norske Veritas (1974 edition) [36] | Stokes’ fifth order wave theory | 0.5–1.2 | 2.0 |
| China Ship Inspection Bureau Standards (1982 edition) [37] | Stokes’ fifth order wave linear theory | 1.0 | 2.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.-H.; Fang, Y.; Chang, S.-Y.; Guo, Y.-Q. Theoretical and Numerical Analysis of Impact Forces on Blocking Piles Within Embankment Breaches Using Flow Velocity Signals. Sensors 2025, 25, 3333. https://doi.org/10.3390/s25113333
Huang X-H, Fang Y, Chang S-Y, Guo Y-Q. Theoretical and Numerical Analysis of Impact Forces on Blocking Piles Within Embankment Breaches Using Flow Velocity Signals. Sensors. 2025; 25(11):3333. https://doi.org/10.3390/s25113333
Chicago/Turabian StyleHuang, Xing-Huai, Yu Fang, Sheng-Yu Chang, and Ying-Qing Guo. 2025. "Theoretical and Numerical Analysis of Impact Forces on Blocking Piles Within Embankment Breaches Using Flow Velocity Signals" Sensors 25, no. 11: 3333. https://doi.org/10.3390/s25113333
APA StyleHuang, X.-H., Fang, Y., Chang, S.-Y., & Guo, Y.-Q. (2025). Theoretical and Numerical Analysis of Impact Forces on Blocking Piles Within Embankment Breaches Using Flow Velocity Signals. Sensors, 25(11), 3333. https://doi.org/10.3390/s25113333