

Review of the Application of UAV Edge Computing in Fire Rescue
Abstract
1. Introduction
2. Scenario Analysis of UAV-Assisted Fire Emergency Rescue
- Forest fires: rapid propagation in open spaces.
- High-rise building fires: thermal-plume diffusion through vertical channels.
- Chemical plant fires: chain reaction with risks of deflagration of hazardous substances.
- Mine fires: oxygen-deficient confined-space environments.
2.1. Emergency Rescue Scenarios: Forest Fire
- Fire Situation Reconnaissance and Monitoring: China’s current forest fire-monitoring system comprises three approaches: ground-based monitoring, satellite patrols, and aerial patrols. Compared to satellite remote sensing, aerial patrols offer higher ground resolution and faster response times. The rapidly advancing remote sensing technology used in UAVs introduced a new method for carrying out aerial patrols and now plays a pivotal role in forest fire prevention and control [18]. UAV-mounted cameras capture detailed real-time images of forest fires, providing updates on fire progression. Additionally, a UAV can flexibly adjust flight trajectories based on environmental conditions and mission requirements, enabling adaptive sensing and computing [19]. These capabilities significantly enhance the accuracy and timeliness of forest fire monitoring [20]. During forest fires, as flames spread and rescue personnel approach the fire zone, the fire’s morphology constantly changes. Uncertainty about the fireline’s shape may hinder decisions regarding approach routes or breakthrough points. To address this problem, ground commanders can utilize UAV reconnaissance to assist in tactical coordination. For instance, commanders can select optimal routes based on live reconnaissance footage, directing rescue teams to critical fire zones [21]. Furthermore, during fire-suppression operations, command centers can leverage the UAV to identify fire-ignition points and predict spread directions, enabling proactive risk mitigation.
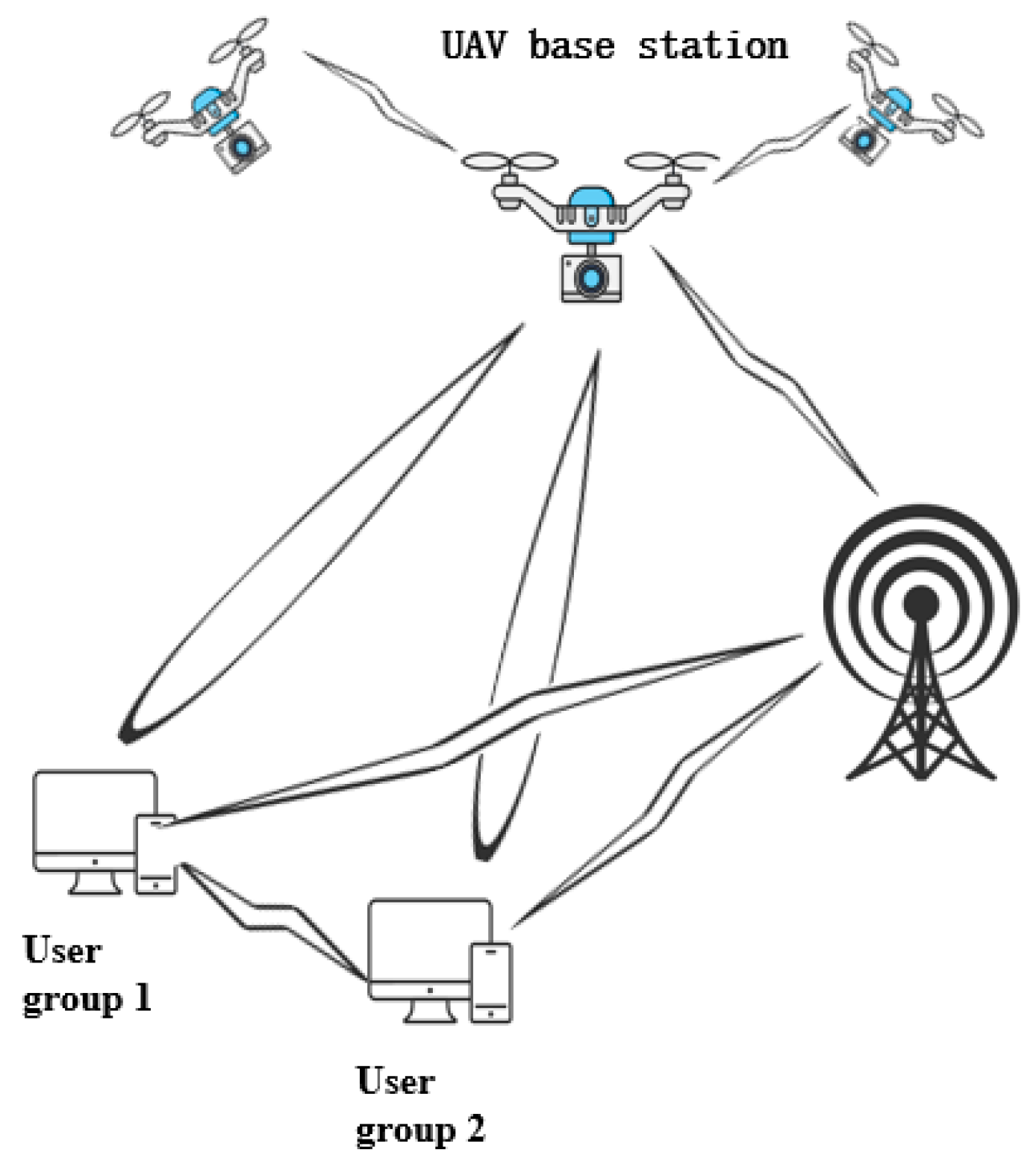
- Communication Support During Rescue: Communication is critical during forest fire incidents. However, vast forest areas often suffer from limited wireless signal coverage due to constraints on transmission distance. UAV relay systems offer an effective solution by providing temporary communication support [22]. Equipped with communication devices (e.g., radios, 4G/5G modules, satellite terminals), UAV relay systems establish temporary airborne communication networks. In multi-UAV fire rescue operations, a high-altitude UAV can act as a mobile communication base station, connecting ground devices to command centers or other nodes [22] and thereby ensuring signal coverage in otherwise unreachable areas.
- Fire Suppression and Rescue Assistance: A UAV can carry and disperse dozens of times its weight in chemical fire retardants to create firebreaks. Under operator control, it can deploy suppression agents; for example, a UAV can launch rain-enhancement flare sticks for artificial precipitation to extinguish fires [23]. Use of a UAV also enables rapid, human-free responses to fire emergencies. Studies show that a small UAV is highly effective and safe for suppressing “cliff fires” and “flying fires” caused by “forest-block” type wildfires in harsh plateau environments. UAV-based strategies also hold reference value for suppressing fires in flat terrains [24].
2.2. Emergency Rescue Scenarios: High-Rise Building Fire
- Precise Positioning: During rescues from high-rise building fires, the complexity and danger of the scene often prevent firefighters from entering the core fire area to obtain timely and accurate disaster information; the lack of this information poses significant challenges to suppression and rescue efforts [25]. By coordinating multiple UAVs, autonomous coverage and deployment of the fire zone can be achieved, converting non-line-of-sight (NLOS) environments into line-of-sight (LOS) conditions and thereby enabling precise target localization in fire-affected areas [26].
- Personnel Evacuation: During high-rise building fires, dense smoke often obstructs the identification of trapped individuals. A UAV equipped with thermal-imaging cameras can detect human body-heat signatures, effectively locating trapped persons and assisting firefighters in pinpointing their positions. Simultaneously, based on real-time fire data transmitted by the UAV system, safe evacuation routes can be identified, significantly improving the rate of success in rescuing trapped individuals [27].
2.3. Emergency Rescue Scenarios: Chemical Plant Fire
- Monitoring of Toxic Substances: In areas with significant toxic or hazardous material leaks, a UAV equipped with sensors for the detection of toxic substances can conduct close-range reconnaissance. By hovering over contaminated zones and performing real-time concentration measurements, the UAV can help to define containment boundaries, identify optimal entry points for mitigation of toxic material by the rescue crew, and prevent secondary accidents [30,31].
- Fire-Scene Investigation: Chemical plant fire zones are often highly complex, with risks of structural collapses, explosions, or secondary hazards. Firefighters frequently lack comprehensive information on ignition points, explosion risks associated with storage tanks, or hazardous chemical leaks. The use of a UAV enables thorough and detailed inspections of fire scenes, as the UAV can gather critical intelligence to mitigate risks and enhance situational awareness [32,33].
2.4. Mine Fire Emergency Rescue Scenarios
3. Advances in UAV Edge Computing Technology
3.1. Current Developments in Edge Computing Technology
3.1.1. Concept and Architecture of Edge Computing
- By processing part or all of the terminal-generated data and tasks at the edge layer rather than in the cloud, edge computing avoids prolonged latency.
- It extracts actionable insights from massive datasets and delivers foundational services rapidly through lightweight analytics [45].
- Device Layer: A system composed of diverse devices connected to the edge network, including sensors, actuators, fixed installations, and mobile devices. These devices are responsible for collecting a wide range of data and uploading it to the edge layer, where efficient storage and computation occur. They interface with edge-layer access points via various network types (4G, 5G, Wi-Fi), ensuring seamless connectivity between the device and edge layers and thereby enabling smooth data transmission and processing [47].
- Edge Layer: The edge layer serves as the core of the three-tier architecture and is positioned between the device layer and the cloud computing layer. Downward, it receives, processes, and forwards data from terminal devices, delivering time-sensitive services such as model training, intelligent sensing, knowledge inference, data analysis, and real-time control to users. Upward, it offloads computational workloads to the cloud for processing and retrieves results. Edge nodes often act as controllers or schedulers to manage network traffic. The edge layer comprises computing and storage devices (edge gateways, edge controllers, edge clouds, and edge sensors) and network equipment (Time-Sensitive Networking (TSN) switches and routers), encapsulating the computational, storage, and networking resources of the edge layer.
- Cloud Layer: The cloud layer receives data streams and tasks from the edge layer, processes or executes them, and returns results to the edge layer. Additionally, the cloud acts as the global controller and scheduler of the entire system, sending control directives to the edge layer to optimize network resource allocation, service deployment, and task-offloading strategies from a holistic perspective. It provides decision support and domain-specific applications such as intelligent manufacturing, networked collaboration, service extension, and personalized customization while offering interfaces for end users. Through cloud–edge collaboration, the cloud and edge layers synergize their respective strengths to enhance overall service performance [47].
- (a)
- Support integrity verification of data during cloud–edge collaborative transmission to prevent malicious tampering during upload and download;
- (b)
- Enable secure storage of data in cloud–edge collaboration while ensuring data integrity and availability to prevent loss or corruption;
- (c)
- Guarantee secure distribution, processing, and destruction of cloud–edge collaborative data, permitting operations only by authorized edge computing users.
- Functional Requirements:
- (a)
- Cloud–edge collaboration;
- (b)
- Real-time data analysis;
- (c)
- Policy execution;
- (d)
- Alarm triggering;
- (e)
- Reporting of abnormal events.
- Security Requirements:
- (a)
- Security capabilities must be adapted to edge computing’s specific frameworks;
- (b)
- Security functions should support flexible deployment and scalability;
- (c)
- Security must be able to sustain resistance against attacks within a certain period;
- (d)
- Security must offer default support for automated implementation, with provisions for manual intervention.
3.1.2. Development Status of Edge Computing Technology
3.2. Research Status of UAV Edge Computing Technology
3.2.1. UAV and MEC
3.2.2. UAV Edge Computing-Related Algorithms
- Sensor Data-Preprocessing Algorithms
- High-frequency-noise removal using a 5×5 Gaussian kernel for image denoising;
- Multi-scale flame color-feature extraction with dynamically adjusted clustering centers;
- Precise flame region localization through adaptive RGB threshold segmentation.
- Multi-Sensor Fusion Algorithms
- Optimization Algorithms
- Parameter-Adaptive Differential Evolution (PADE) Algorithm: Dynamically adjusts parameters to optimize UAV deployment positions, maximizing coverage of IoT devices. This reduces total system energy consumption by approximately 16%.
- Greedy Task-Scheduling Algorithm: Categorizes tasks and prioritizes resource-constrained tasks to ensure timely completion under latency constraints.
- Collaborative Optimization Framework: Decomposes complex non-convex optimization problems into UAV deployment and task-scheduling subproblems, which are solved by PADE and the greedy algorithm, respectively.
4. Application of UAV Edge Computing Technology in Fire Emergency Rescue
4.1. Real-Time Monitoring and Early Warning
4.2. Rescue Communication Guarantee
4.3. Detection of Gas from Chemical Plants
5. Future Challenges for UAV Edge Computing Technology
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zervas, E.; Mpimpoudis, A.; Anagnostopoulos, C.; Sekkas, O.; Hadjiefthymiades, S. Multisensor data fusion for fire detection. Inf. Fusion 2011, 12, 150–159. [Google Scholar] [CrossRef]
- Twigg, J.; Christie, N.; Haworth, J.; Osuteye, E.; Skarlatidou, A. Improved methods for fire risk assessment in low-income and informal settlements. Int. J. Environ. Res. Public Health 2017, 14, 139–151. [Google Scholar] [CrossRef] [PubMed]
- China News Network. The Burnt Area Exceeds the Downtown Area of San Francisco! What’s Wrong with the United States When There’s No Water in the Fire Hydrant to Put out the Fire?|International Bureau of Knowledge [EB/OL]. (2025-1-13) [2025-2-06]. Available online: http://chinanews.co-m.cn/gj/2025-1-13/10352381.shtml (accessed on 7 February 2025).
- National Fire and Rescue Bureau. The National Fire Situation Report from January to October This Year Has Been Released [EB/OL]. (2023-11-09) [2024-9-26]. Available online: https://www.119.gov.cn/qmxfxw/mtbd/spbd/2023/40340.shtml (accessed on 7 February 2025).
- Mukherjee, A.; Mondal, J.; Dey, S. Accelerated fire detection and localization at edge. ACM Trans. Embed. Comput. Syst. 2022, 21, 1–27. [Google Scholar] [CrossRef]
- Khan, A.; Gupta, S.; Gupta, S.K. Emerging UAV technology for disaster detection, mitigation, response, and preparedness. J. Field Robot. 2022, 39, 905–955. [Google Scholar] [CrossRef]
- Aminzadeh, A.; Khoshnood, A.M. Multi-UAV cooperative search and coverage control in post-disaster assessment: Experimental Implementation. Intell. Serv. Robot. 2023, 16, 415–430. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned aerial vehicles for search and rescue: A Survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Hassler, J.; Andersson Granberg, T.; Ceccato, V. Socio-spatial inequities of fire and rescue services in Sweden: An Analysis of Real and Estimated Response Times. Fire Technol. 2024, 60, 193–212. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A Literature Review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Ouyang, Q.; Wu, Z.; Cong, Y.; Wang, Z. Formation control of unmanned aerial vehicle swarms: A Comprehensive Review. Asian J. Control. 2023, 25, 570–593. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, C.; Liu, X.; Tian, Y.; Zhang, J.; Cui, W. Forest fire monitoring method based on UAV visual and infrared image fusion. Remote Sens. 2023, 15, 3173. [Google Scholar] [CrossRef]
- Wei, X.; Liu, R.; Liu, Y. Forest change in China: A Review. Chin. Geogr. Sci. 2023, 33, 489–502. [Google Scholar] [CrossRef]
- National Bureau of Statistics. Annual Data [EB/OL]. (2024-02-29) [2024-10-16]. Available online: https://data.stats.gov.cn/easy-query.htm?cn=C01 (accessed on 8 February 2025).
- Yun, B.; Zheng, Y.; Lin, Z.; Li, T. FFYOLO: A Lightweight Forest Fire Detection Model Based on YOLOv8. Fire 2024, 7, 93–111. [Google Scholar] [CrossRef]
- Kinaneva, D.; Hristov, G.; Raychev, J.; Zahariev, P. Application of artificial intelligence in UAV platforms for early forest fire detection. In Proceedings of the 2019 27th National Conference with International Participation (TELECOM), Sofia, Bulgaria, 30–31 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 50–53. [Google Scholar]
- Wang, J.; Fan, X.; Yang, X.; Tjahjadi, T.; Wang, Y. Semi-supervised learning for forest fire segmentation using UAV imagery. Forests 2022, 13, 1573. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, B.; Wu, X.; Zhao, E. Research on fire detection methods in UAV forest fire monitoring. Remote Sens. Inf. 2015, 30, 107–110+124. [Google Scholar]
- Yu, Z.; Sun, Z.; Cheng, Y.; Guo, B. A review of intelligent UAV swarm collaborative perception and computation. Acta Aeronaut. Et Astronaut. Sin. 2024, 45, 630912. [Google Scholar]
- Wang, Y.; Ning, W.; Wang, X.; Zhang, S.; Yang, D. A Novel method for analyzing infrared imagestaken by unmanned aerial vehicles for forest fire monitoring. Trait. Du Signal 2023, 40, 1219–1226. [Google Scholar] [CrossRef]
- Feng, G. Research on the application of drones in forest fire fighting command. Saf. Prod. China 2021, 16, 52–53. [Google Scholar]
- Binti Burhanuddin, L.A.; Liu, X.; Deng, Y.; Challita, U.; Zahemszky, A. QoE optimization for live video streaming in UAV-to-UAV communications via deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 71, 5358–5370. [Google Scholar] [CrossRef]
- Liang, Y.; Yuan, X.L.; Liu, X.D. The application and development of drones in forest fire prevention. For. Fire Prev. 2020, 1, 50–54. [Google Scholar]
- Wang, M.; He, C.; Song, X.F. Unmanned aerial vehicle forest fire suppression technology in high-altitude “forest block” environment. Fire Sci. Technol. 2022, 41, 1737–1740. [Google Scholar]
- Xiangs, D. Research on fire fighting and rescue reconnaissance and command based on drones. China Emerg. Rescue 2020, 1, 37–41. [Google Scholar]
- Li, K.; Huang, C.; Liang, J.; Zou, Y.; Xu, B.; Yao, Y.; Zhang, Y.; Liu, D. Research on autonomous and collaborative deployment of massive mobile base stations in high-rise building fire field. Sensors 2023, 23, 7664. [Google Scholar] [CrossRef] [PubMed]
- Zhoux, Y. Research on the Application of drones in high rise building fire fighting. Fire Prot. Ind. (Electron. Version) 2024, 10, 22–24. [Google Scholar]
- Liu, M.; Wang, Y.; Luo, L.; Bao, S.; Jia, B.; Li, X.; Ding, W. Segmented line heat source model for thermal radiation calculation of jet fires in chemical plants. ASME J. Heat Mass Transf. 2023, 145, 092801. [Google Scholar] [CrossRef]
- Khalili, A.; Rezaei, A.; Xu, D.; Dressler, F.; Schober, R. Efficient UAV hovering, resource allocation, and trajectory design for ISAC with limited backhaul capacity. IEEE Trans. Wirel. Commun. 2024, 23, 17635–17650. [Google Scholar] [CrossRef]
- Li, P. The application of drones in chemical fire rescue. Chem. Manag.-T 2022, 36, 109–112. [Google Scholar]
- Yang, S.Y. application of drones in chemical fire rescue work. Chem. Manag. 2022, 14, 90–92+113. [Google Scholar]
- Wangh, T. Using drones to conduct on-site fire inspections. Fire Prot. Ind. (Electron. Version) 2021, 7, 87+89. [Google Scholar]
- Liu, C. Application of drones in chemical fire fighting and rescue work. Chem. Fiber Text. Technol. 2022, 51, 100–102. [Google Scholar]
- Lei, K.; Qiu, D.; Zhang, S.; Wang, Z.; Jin, Y. Coal mine fire emergency rescue capability assessment and emergency disposal research. Sustainability 2023, 15, 8501. [Google Scholar] [CrossRef]
- National Mining Safety Administration. Bureau Case of the“2.17”Major Fire Accident at Caojiawa Gold Mine in Zhaoyuan City, Yantai, Shandong Province [EB/OL]. (2021-7-14) [2014-10-13]. Available online: https://www.chinamine-safet-y.gov.cn/zfxxgk/fdzdgknr/sgcc/sgalks/202107/t20210714_391956.shtml (accessed on 9 February 2025).
- National Mining Safety Administration. Bureau Case of the “9.24” Major Fire Accident at Shanjiao Tree Mine of Guizhou Panjiang Precision Coal Co., Ltd. [EB/OL]. (2024-9-19) [2014-10-13]. Available online: https://www.chinamine-safet-y.gov.cn/zfxxgk/fdzdgknr/sgcc/sgalks/202409/t20240919_501797.shtml (accessed on 9 February 2025).
- Gao, Y.; Hao, M.; Wang, Y.; Dang, L.; Guo, Y. Multi-scale coal fire detection based on an improved active contour model from Landsat-8 satellite and UAV images. ISPRS Int. J. Geo-Inf. 2021, 10, 449. [Google Scholar] [CrossRef]
- He, X.; Yang, X.; Luo, Z.; Guan, T. Application of unmanned aerial vehicle (UAV) thermal infrared remote sensing to identify coal fires in the Huojitu coal mine in Shenmu city, China. Sci. Rep. 2020, 10, 13895. [Google Scholar] [CrossRef] [PubMed]
- Yuan, G.; Wang, Y.; Zhao, F.; Wang, T.; Zhang, L.; Hao, M.; Yan, S.; Dang, L.; Peng, B. Accuracy assessment and scale effect investigation of UAV thermography for underground coal fire surface temperature monitoring. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102426. [Google Scholar] [CrossRef]
- Shao, Z.; Liang, Y.; Tian, F.; Song, S.; Deng, R. Constructing 3-D land surface temperature model of local coal fires using UAV thermal images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5002309. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, Y.; Gao, P.; Hua, X.; Zhang, D.; Jiang, T. Multi-UAV network assisted intelligent edge computing: Challenges and Opportunities. China Commun. 2022, 19, 258–278. [Google Scholar] [CrossRef]
- Khan, W.Z.; Ahmed, E.; Hakak, S.; Yaqoob, I.; Ahmed, A. Edge computing: A Survey. Future Gener. Comput. Syst. 2019, 97, 219–235. [Google Scholar] [CrossRef]
- Carvalho, G.; Cabral, B.; Pereira, V.; Bernardino, J. Edge computing: Current Trends, Research Challenges and Future Directions. Computing 2021, 103, 993–1023. [Google Scholar] [CrossRef]
- Shi, W.S.; Zhang, X.Z.; Wang, Y.F.; Zhang, Q.Y. Edge computing: Status Quo and Prospects. Comput. Res. Dev. 2019, 56, 69–89. [Google Scholar]
- Kang, J.; Kim, S.; Kim, J.; Sung, N.; Yoon, Y. Dynamic offloading model for distributed collaboration in edge computing: A Use Case on Forest Fires Management. Appl. Sci. 2020, 10, 2334. [Google Scholar] [CrossRef]
- Sulieman, N.A.; Ricciardi Celsi, L.; Li, W.; Zomaya, A.; Villari, M. Edge-oriented computing: A Survey on Research and Use Cases. Energies 2022, 15, 452. [Google Scholar] [CrossRef]
- Cheng, N.; He, J.; Yin, Z.; Zhou, C.; Wu, H.; Lyu, F.; Zhou, H.; Shen, X. 6G service-oriented space-air-ground integrated network: A Survey. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar] [CrossRef]
- GB/T42564-2023; Information Security Technology-Security Technical Requirements for Edge Computing. National Information Security Standardization Technical Committee (SAC/TC 260); Standards Press of China: Beijing, China, 2023.
- Pallis, G.; Vakali, A. Insight and perspectives for content delivery networks. Commun. ACM 2006, 49, 101–106. [Google Scholar] [CrossRef]
- Satyanarayanan, M.; Bahl, P.; Caceres, R.; Davies, N. The case for vm-based cloudlets in mobile computing. IEEE Pervasive Comput. 2009, 8, 14–23. [Google Scholar] [CrossRef]
- CNCF, Eclipse Foundation Push Kubernetes to the Edge. [EB/OL]. (2018-9-26) [2024-11-22]. Available online: https://www.-sdxcentral.com/articles/news/cncf-eclipse-foundation-push-kubernetes-to-the-edge/2018/09/ (accessed on 11 February 2025).
- Sittón-Candanedo, I.; Alonso, R.S.; García, Ó.; Muñoz, L.; Rodríguez-González, S. Edge computing, iot and social computing in smart energy scenarios. Sensors 2019, 19, 3353. [Google Scholar] [CrossRef] [PubMed]
- Yus, S.; Chenx, Y. Key technological innovations and challenges in urban air mobility. Acta Aeronaut. Et Astronaut. Sin. 2024, 45, 730657. [Google Scholar]
- Sacco, A.; Esposito, F.; Marchetto, G.; Kolar, G.; Schwetye, K. On edge computing for remote pathology consultations and computations. IEEE J. Biomed. Health Inform. 2020, 24, 2523–2534. [Google Scholar] [CrossRef]
- Khan, F.; Jan, M.A.; Rehman, A.U.; Mastorakis, S.; Alazab, M.; Watters, P. A secured and intelligent communication scheme for IIoT-enabled pervasive edge computing. IEEE Trans. Ind. Inform. 2020, 17, 5128–5137. [Google Scholar] [CrossRef]
- Xia, X.; Chen, F.; Grundy, J.; Abdelrazek, M.; Jin, H.; He, Q. Constrained app data caching over edge server graphs in edge computing environment. IEEE Trans. Serv. Comput. 2021, 15, 2635–2647. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, D.; He, S.; Zhang, Y.; Li, T. A survey on end-edge-cloud orchestrated network computing paradigms: Transparent Computing, Mobile Edge Computing, Fog Computing, and Cloudlet. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Yazid, Y.; Ez-Zazi, I.; Guerrero-González, A.; El Oualkadi, A.; Arioua, M. UAV-enabled mobile edge-computing for IoT based on AI: A Comprehensive review. Drones 2021, 5, 148. [Google Scholar] [CrossRef]
- Li, W.; Guo, Y.; Li, N.; Yuan, H.; He, M.; Wang, N. Intelligent reflector surface assisted UAV mobile edge computing task data maximization method. Acta Aeronaut. Et Astronaut. Sin. 2023, 44, 328486. [Google Scholar]
- Songz, H. Edge computing—Walking at the forefront of intelligent manufacturing (below). Autom. Expo 2017, 4, 54–56. [Google Scholar]
- Bu, F.; Gharajeh, M.S. Intelligent and vision-based fire detection systems: A Survey. Image Vis. Comput. 2019, 91, 103803. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Zhu, H.; Chen, Q.; Zhu, X.; Yao, W.; Chen, X. Edge computing powers aerial swarms in sensing, communication, and planning. Innov. 2023, 4, 100506. [Google Scholar] [CrossRef]
- Ramírez-Gallego, S.; Krawczyk, B.; García, S.; Woźniak, M.; Herrera, F. A survey on data preprocessing for data stream mining: Current Status and Future Directions. Neurocomputing 2017, 239, 39–57. [Google Scholar] [CrossRef]
- Shen, X.; Liu, Z.; Xu, Z. Unsupervised Flame Segmentation Method Based on GK-RGB in Complex Background. Fire 2023, 6, 384. [Google Scholar] [CrossRef]
- Feng, H.; Qiu, J.; Wen, L.; Zhang, J.; Yang, J.; Lyu, Z.; Liu, T.; Fang, K. U3UNet: An accurate and reliable segmentation model for forest fire monitoring based on UAV vision. Neural Netw. 2025, 185, 107207. [Google Scholar] [CrossRef]
- Jayasankar, U.; Thirumal, V.; Ponnurangam, D. A survey on data compression techniques: From the Perspective of Data Quality, Coding Schemes, Data Type and Applications. J. King Saud Univ. Comput. Inf. Sci. 2021, 33, 119–140. [Google Scholar] [CrossRef]
- Azar, J.; Makhoul, A.; Barhamgi, M.; Couturier, R. An energy efficient IoT data compression approach for edge machine learning. Future Gener. Comput. Syst. 2019, 96, 168–175. [Google Scholar] [CrossRef]
- Du, B.; Duan, Y.; Zhang, H.; Tao, X.; Wu, Y.; Ru, C. Collaborative image compression and classification with multi-task learning for visual internet of things. Chin. J. Aeronaut. 2022, 35, 390–399. [Google Scholar] [CrossRef]
- Boehrer, N.; Gabriel, A.d.S.P.; Brandt, A.; Uijens, W.; Kampmeijer, L.; van der Stap, N.; Schutte, K. Onboard ROI selection for aerial surveillance using a high resolution, high framerate camera. In Proceedings of the Mobile Multimedia/Image Processing, Security, and Applications, Online, 27 April–8 May 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11399, pp. 76–95. [Google Scholar]
- Hadiwardoyo, S.A.; Calafate, C.T.; Cano, J.-C.; Krinkin, K.; Klionskiy, D.; Hernández-Orallo, E.; Manzoni, P. Three dimensional UAV positioning for dynamic UAV-to-car communications. Sensors 2020, 20, 356. [Google Scholar] [CrossRef]
- Shi, E.; Xu, J.; Yang, X.; Tang, C.; Zhang, P.; Zhang, D.; Qin, C. A new anti-interference fitering algorithm for quad rotor UAV. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5732–5737. [Google Scholar]
- Matos-Carvalho, J.P.; Santos, R.S.; Tomic, S.; Beko, M. GTRS-based algorithm for UAV navigation in indoor environments employing range measurements and odometry. IEEE Access 2021, 9, 89120–89132. [Google Scholar] [CrossRef]
- Chen, S.; Hu, F.; Chen, Z.; Wu, H. Correction method for UAV pose estimation with dynamic compensation and noise reduction using multi-sensor fusion. IEEE Trans. Consum. Electron. 2023, 70, 980–989. [Google Scholar] [CrossRef]
- Hu, X.; Wong, K.-K.; Yang, K.; Zheng, Z. UAV-assisted relaying and edge computing: Scheduling and Trajectory Optimization. IEEE Trans. Wirel. Commun. 2019, 18, 4738–4752. [Google Scholar] [CrossRef]
- Li, F.; Luo, J.; Qiao, Y.; Li, Y. Joint UAV deployment and task offloading scheme for multi-UAV-assisted edge computing. Drones 2023, 7, 284. [Google Scholar] [CrossRef]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Shen, H.; Wang, D.; Huang, Z.; Jia, Y. Optimization of clustering and trajectory for minimizing age of information in unmanned aerial vehicle-assisted mobile edge computing network. Sensors 2024, 24, 1742. [Google Scholar] [CrossRef]
- Ministry of Emergency Management of the People’s Republic of China. Protecting Forests, Grasslands, Fire Prevention and Disaster Prevention Starts from Me [EB/OL]. (2024-11-21) [2025-1-10]. Available online: https://www.mem.gov.cn/kp/zrzh/202411/t20241121_512263.shtml (accessed on 15 February 2025).
- Wang, L.; Li, R.; Xu, L.; Zhu, W.; Zhang, Y.; Fei, A. Aerial-Ground Cooperative Vehicular Networks for Emergency Integrated Localization and Communication. IEEE Netw. 2023, 37, 323–330. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G. A survey on UAV-assisted wireless communications: Recent advances and future trends. Comput. Commun. 2023, 208, 44–78. Available online: https://www.sciencedirect.com/science/article/pii/S0140366423001743 (accessed on 15 February 2025). [CrossRef]
- Peng, X.; Lan, X.; Chen, Q. Age-of-Task-Aware AAV-Based Mobile Edge Computing Techniques in Emergency Rescue Applications. IEEE Internet Things J. 2025, 12, 8909–8930. [Google Scholar] [CrossRef]
- Masuduzzaman; Nugraha, R.; Shin, S.Y. IoT-Based CO2 Gas-Level Monitoring and Automated Decision-Making System in Smart Factory Using UAV-Assisted MEC, 2022-01-01, 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1023–1027. [Google Scholar]
- Allers, M.; Ahrens, A.; Hitzemann, M.; Bock, H.; Wolf, T.; Radunz, J.; Meyer, F.; Wilsenack, F.; Zimmermann, S.; Ficks, A. Real-Time Remote Detection of Airborne Chemical Hazards—An Unmanned Aerial Vehicle (UAV) Carrying an Ion Mobility Spectrometer. IEEE Sens. J. 2023, 23, 16562–16570. [Google Scholar] [CrossRef]
- Zhang, H.J.; Ma, J.Y.; Liu, H.Y.; Guo, P.; Deng, H.; Xu, K. Indoor positioning technology of multi-rotor flying robot based on visual-inertial fusion. Acta Aeronaut. Et Astronaut. Sin. 2023, 44, 426964. [Google Scholar]
- Wan, H. UAV visual positioning method based on factor graph. Acta Aeronaut. Et Astro-Naut. Sin. 2023, 44, 727627. [Google Scholar]
- Minghui, L.I.; Tianjiang, H.U. Deep learning enabled localization for UAV autolanding. Chin. J. Aero-Naut. 2021, 34, 585–600. [Google Scholar]
- Gao, D.; Zhu, M.H.; Han, P. A geomagnetic/inertial depth fusion navigation method. J. Chin. Inert. Technol. 2022, 30, 437–444. [Google Scholar]
- Zhao, L.; Li, D.; Zhao, C.; Jiang, F. Some achievements on detection methods of autonomous landing markers for, U.A.V. Acta Aeronaut. Et Astronaut. Sin. 2022, 43, 025882. [Google Scholar]
- Al-Doghman, F.; Moustafa, N.; Khalil, I.; Sohrabi, N.; Tari, Z.; Zomaya, A.Y. AI-enabled secure microservices in edge computing: Opportunities and challenges. IEEE Trans. Serv. Comput. 2022, 16, 1485–1504.95. [Google Scholar] [CrossRef]
- Kenioua, L.; Lejdel, B.; Alamri, S.; Ramadan, Q. A password-based authentication approach for edge computing architectures. Egypt. Inform. J. 2024, 28, 100543.96. [Google Scholar] [CrossRef]
- Min, M.; Liu, Z.; Duan, J.; Zhang, P.; Li, S. Safe-learning-based location-privacy-preserved task offloading in mobile edge computing. Electronics 2023, 13, 89.97. [Google Scholar] [CrossRef]
- Suganya, B.; Gopi, R.; Kumar, A.R.; Singh, G. Dynamic task offloading edge-aware optimization framework for enhanced UAV operations on edge computing platform. Sci. Rep. 2024, 14, 16383. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension | AI | MEC |
|---|---|---|
| Technical category | Software-level intelligent decision-making methods | Computing paradigms at the hardware–architectural level |
| Core objectives | Data-driven learning for prediction/classification | Complete calculation and storage near the data source |
| Implementation form | Mathematical model | Distributed node network |
| GK-RGB | RGB | |
|---|---|---|
| Accuracy | 97.71% | 93.89% |
| IOU | 81.34% | 57.43% |
| F1-score | 89.61% | 72.41% |
| GK-RGB | U3U-Net | |
|---|---|---|
| Method type | Unsupervised Learning | Supervised deep learning |
| Core technology | RGB color-space threshold segmentation. Gaussian filtering denoising. Optimization of color distribution by K-means clustering. | Improved U-Net architecture. Full-scale jump connection fusion multi-level features. Residual U-shaped module. |
| Use cases | Flame segmentation in complex scenarios (indoor, street, etc.) | Dynamic forest fire monitoring via UAV aerial imagery |
| Real-time performance | Fast calculation, but weak dynamic adaptability | Support real-time monitoring and need to optimize edge deployment |
| Improved UKF Algorithm | DMK and UEAKF | Dynamic Correction and Denoising UKF Algorithm | |
|---|---|---|---|
| Noise adaptability | Improved the ability to suppress noise in complex electromagnetic environments. | The integration of the GTRS algorithm and odometer information improves the algorithm’s adaptability to noise. | In multi-sensor fusion attitude estimation, the impact of external uncertainty on the state estimation system is effectively reduced. |
| Algorithm complexity | The algorithm needs to run in unmanned aerial vehicle systems with high real-time requirements, so the complexity should be relatively low. | The average processing time of the algorithm is about 21 milliseconds, which translates to high real-time performance. | The algorithm increases the computational load, but it still meets the real-time requirements. |
| Practical application effectiveness | The algorithm has demonstrated good anti-interference performance and stability on quadcopter unmanned aerial vehicles. | Algorithms have high reliability and practicality in practical applications and can effectively guide drones to fly along predetermined paths. | The improved method significantly improves the accuracy and robustness of state estimation. Compared with the standard UKF algorithm, the average error is significantly reduced, and the algorithm can meet real-time requirements. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Xu, R.; Luo, J.; Cheng, H. Review of the Application of UAV Edge Computing in Fire Rescue. Sensors 2025, 25, 3304. https://doi.org/10.3390/s25113304
Sun H, Xu R, Luo J, Cheng H. Review of the Application of UAV Edge Computing in Fire Rescue. Sensors. 2025; 25(11):3304. https://doi.org/10.3390/s25113304
Chicago/Turabian StyleSun, Hongqiang, Rui Xu, Jianguo Luo, and Han Cheng. 2025. "Review of the Application of UAV Edge Computing in Fire Rescue" Sensors 25, no. 11: 3304. https://doi.org/10.3390/s25113304
APA StyleSun, H., Xu, R., Luo, J., & Cheng, H. (2025). Review of the Application of UAV Edge Computing in Fire Rescue. Sensors, 25(11), 3304. https://doi.org/10.3390/s25113304