
TU-DAT: A Computer Vision Dataset on Road Traffic Anomalies



Abstract
1. Introduction
Need for Accident Datasets
2. Related Work
2.1. Datasets for Modeling Road Accidents
2.2. Accident Detection and Prediction
3. Dataset Description
3.1. Dataset Creation
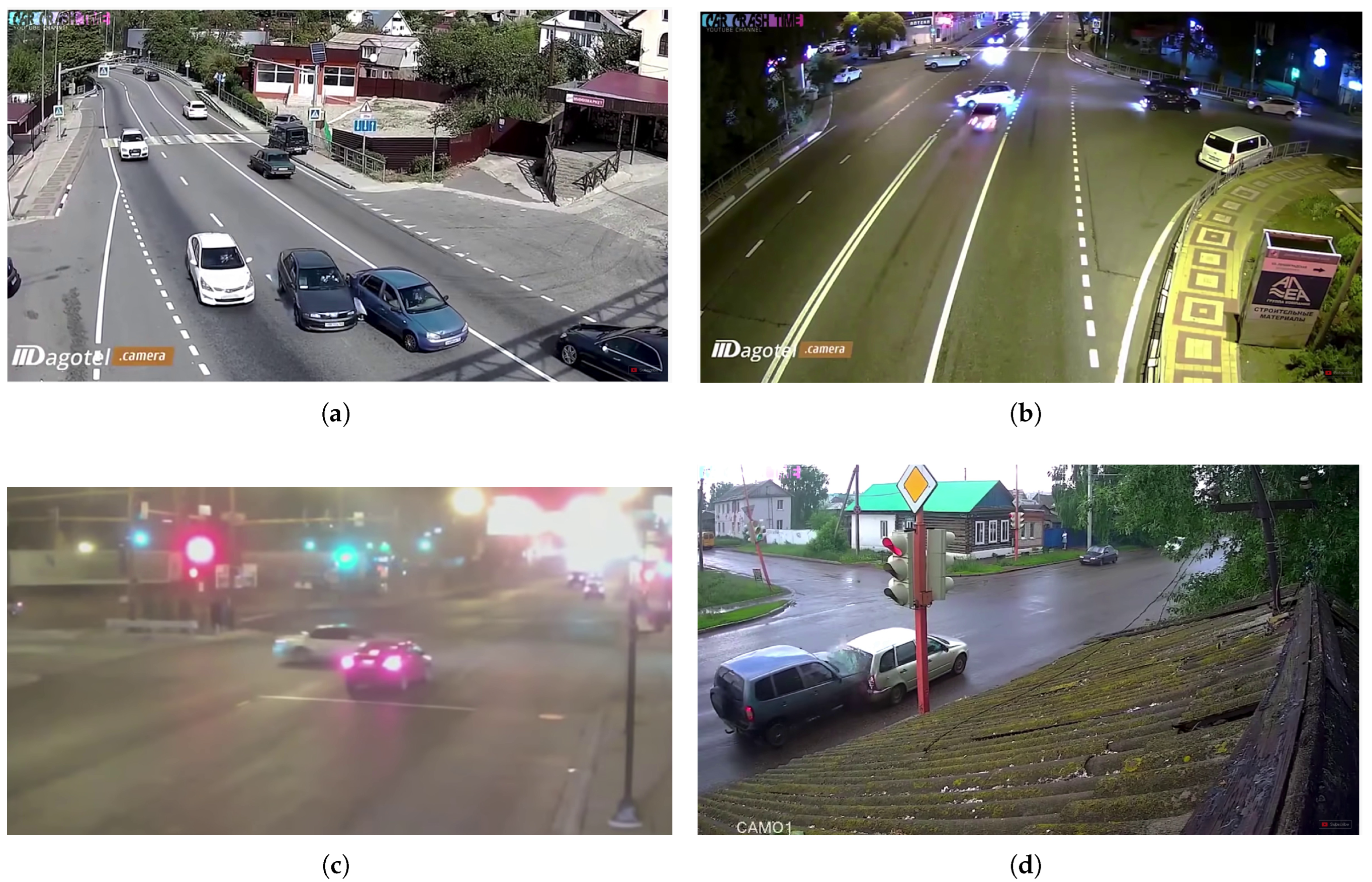
3.1.1. Data Collection
3.1.2. Data Annotation
3.2. Statistics of TU-DAT Dataset
3.3. BeamNG.drive Simulator
BeamNG.drive: Features, Physics, and Applications
- Soft-Body Physics Model: BeamNG.drive’s most defining feature is its unique soft-body physics engine, which determines how vehicles behave in a virtual environment. Unlike traditional rigid-body physics in most racing games, this technology allows a vehicle’s structure to deform accurately upon impact. Each part of the vehicle, from crumple zones to body panels, reacts independently and dynamically in real time to collisions. As a result, players experience a highly immersive driving simulation where vehicle physics closely mirrors real-life dynamics.
- Realistic Material Properties: At the core of BeamNG.drive’s realism is its node–beam structure, which forms the foundation of every vehicle model. Nodes represent individual physical points, while beams simulate the connections between these nodes, enabling detailed mechanical responses to external forces. This sophisticated system models materials such as steel, aluminum, plastic, and rubber, each exhibiting unique properties that influence vehicle behavior under stress. Whether it is the flex of a plastic bumper in a minor collision or the resilience of a steel frame in a high-speed crash, these material properties contribute significantly to the game’s authenticity.
- Deformation Mechanics: Deformation mechanics in BeamNG.drive enhance the impact of crashes and accidents very realistically. When a vehicle crashes, the soft-body physics engine calculates stress and strain on each component, resulting in lifelike damage representation. For instance, a high-speed collision may cause metal panels to crumple significantly, glass windows to shatter, or wheels to bend at unnatural angles. This intricate simulation also accounts for crucial factors such as impact angle, vehicle speed at the moment of collision, and the material strength of the affected components, creating a highly realistic driving experience.
- Suspension and Tire Dynamics: Beyond vehicle deformation, BeamNG.drive incorporates highly accurate suspension and tire physics, further enhancing realism. The suspension system mimics real-world behavior, effectively simulating weight transfer, body roll, and compression in actual vehicles. This attention to detail affects vehicle handling and influences how cars respond to different terrains and driving conditions. Tires interact with various surfaces—such as asphalt, gravel, and mud—realistically affecting grip levels, skidding behavior, and rolling resistance, ultimately making vehicle control challenging and immersive.
- Crash Testing Scenarios: BeamNG.drive can also be used as a tool for conducting controlled crash tests, allowing players to experiment with various vehicles in different environments. Users can simulate common crash scenarios, including head-on collisions, side impacts, rollovers, and rear-end crashes. The platform also supports AI-controlled vehicles, enabling multi-vehicle collision simulations replicating complex crash dynamics. This feature has drawn interest from engineers and researchers, who often utilize BeamNG.drive as a cost-effective way to visualize crash physics and validate safety measures before conducting real-world testing.
- Influence of Environment on Vehicle Damage: The environment plays a crucial role in BeamNG.drive’s approach to crash physics, considering multiple external factors that influence collision outcomes. For example, terrain type, surrounding obstacles, and weather conditions all impact how a vehicle behaves during a crash. A car colliding with a tree will sustain a distinctly different deformation pattern than a concrete wall impact. Additionally, off-road terrains introduce vehicle wear and tear, challenging players to navigate conditions that test their driving skills and vehicle endurance. By combining these elements, BeamNG.drive can deliver an engaging gaming experience and a rich platform for exploring vehicle physics, making it a unique offering in the world of vehicular simulation.
4. Methods
4.1. Spatiotemporal Reasoning
4.2. Predicting Anomalies in Road Traffic
4.2.1. Stage 1
4.2.2. Stage 2
4.2.3. Resolving Anomalies
4.3. Effectiveness of Synthetic-Real Data Fusion
4.4. Enhancing VLMs for Situational Awareness
4.4.1. Fine-Tuning VLMs
4.4.2. TU-DAT in Automated Situational Understanding
5. Technical Validation
5.1. Results of Predicting Anomalies in Road Traffic
Comparison with State-of-the-Art Methods
5.2. Results on Enhancing VLMs for Situational Awareness
Cross-Dataset Generalization
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- NHTSA. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813561 (accessed on 1 September 2024).
- Ou, J.; Xia, J.; Wang, Y.; Wang, C.; Lu, Z. A data-driven approach to determining freeway incident impact areas with fuzzy and graph theory-based clustering. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 178–199. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, T.; Zhang, L.; Xie, S.; Jin, H. Enhancing Autonomous Vehicle Safety: An Integrated Ensemble Learning-Logit Model for Accident Severity Prediction and Analysis. Int. J. Transp. Sci. Technol. 2025; in press. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, C.; Liu, Z. Can historical accident data improve sustainable urban traffic safety? A predictive modeling study. Sustainability 2024, 16, 9642. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, X.; Xu, M.; Pu, Z.; Wang, Y.; Atkins, E.; Crandall, D.J. Dota: Unsupervised detection of traffic anomaly in driving videos. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 444–459. [Google Scholar] [CrossRef]
- Shah, A.; Lamare, J.B.; Anh, T.N.; Hauptmann, A. CADP: A Novel Dataset for CCTV Traffic Camera based Accident Analysis. arXiv 2018, arXiv:1809.05782. [Google Scholar]
- Ijjina, E.P.; Chand, D.; Gupta, S.; Goutham, K. Computer vision-based accident detection in traffic surveillance. In Proceedings of the 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 6–8 July 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- QMUL. Available online: https://personal.ie.cuhk.edu.hk/~ccloy/downloads_qmul_junction.html (accessed on 30 September 2021).
- Bortnikov, M.; Khan, A.; Khattak, A.M.; Ahmad, M. Accident recognition via 3d cnns for automated traffic monitoring in smart cities. In Proceedings of the Advances in Computer Vision: Proceedings of the 2019 Computer Vision Conference (CVC), Las Vegas, NV, USA, 2–3 May 2019; Springer: Cham, Switzerland, 2020; Volume 994, pp. 256–264. [Google Scholar]
- Bao, W.; Yu, Q.; Kong, Y. Uncertainty-based traffic accident anticipation with spatio-temporal relational learning. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 2682–2690. [Google Scholar]
- Chan, F.H.; Chen, Y.T.; Xiang, Y.; Sun, M. Anticipating accidents in dashcam videos. In Proceedings of the Asian Conference on CV, Taipei, Taiwan, 20–24 November 2016; Springer: Cham, Switzerland, 2016; pp. 136–153. [Google Scholar]
- Dai, J.; Teng, J.; Bai, X.; Shen, Z.; Xuan, D. Mobile phone based drunk driving detection. In Proceedings of the IC-PCT Health, Munich, Germany, 22–25 March 2010; pp. 1–8. [Google Scholar]
- Devi, M.S.; Bajaj, P.R. Driver Fatigue Detection Based on Eye Tracking. In Proceedings of the ICETET, Nagpur, India, 16–18 July 2008; pp. 649–652. [Google Scholar]
- Pradeep, P.; Kant, K.; Pal, A. Non-Intrusive Driver Behavior Characterization from Road-Side Cameras. IEEE IoT J. 2023, 11, 502–509. [Google Scholar]
- Bouindour, S.; Hu, R.; Snoussi, H. Enhanced CNNs for abnormal event detection in video streams. In Proceedings of the 2019 IEEE Second AIKE, Sardinia, Italy, 3–5 June 2019; IEEE: New York, NY, USA, 2019; pp. 172–178. [Google Scholar]
- Nguyen, H.; Kieu, L.M.; Wen, T.; Cai, C. DL methods in transportation domain: A review. IET ITS 2018, 12, 998–1004. [Google Scholar]
- Ali, U.; Mahmood, T. Using DL to predict short term traffic flow: A systematic literature review. In Proceedings of the ITSC, Hyvinkää, Finland, 29–30 November 2017; Springer: Cham, Switzerland, 2017; pp. 90–101. [Google Scholar]
- Zhu, S.; Chen, C.; Sultani, W. Video anomaly detection for smart surveillance. arXiv 2020, arXiv:2004.00222. [Google Scholar]
- Wang, J.; Gu, Q.; Wu, J.; Liu, G.; Xiong, Z. Traffic speed prediction and congestion source exploration: A DL method. In Proceedings of the ICDM, Barcelona, Spain, 12–15 December 2016; IEEE: New York, NY, USA, 2016; pp. 499–508. [Google Scholar]
- BeamNG.Drive. Available online: https://www.beamng.com/game/ (accessed on 15 September 2021).
- CVAT. Available online: https://github.com/openvinotoolkit/cvat (accessed on 1 September 2021).
- Underwood, G. Traffic and Transport Psychology: Theory and Application; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2019. [Google Scholar]
- De Moura, L.; Bjørner, N. Satisfiability Modulo Theories: Introduction and Applications. Commun. ACM 2011, 54, 69–77. [Google Scholar] [CrossRef]
- Artikis, A.; Sergot, M.; Paliouras, G. An event calculus for event recognition. IEEE TKDE 2014, 27, 895–908. [Google Scholar] [CrossRef]
- Pradeep, P.; Kant, K.; Pal, A. C-FAR: A Compositional Framework for Anomaly Resolution in Intelligent Transportation System. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1015–1024. [Google Scholar] [CrossRef]
- Pradeep, P.; Kant, K.; You, S. Enhancing Visual Language Models with Logic Reasoning for Situational Awareness. Submitted for Publication. 2024. Available online: https://www.kkant.net/papers/Pavana_VLM_paper.pdf (accessed on 15 March 2025).
- Li, Z.; Wu, X.; Du, H.; Nghiem, H.; Shi, G. Benchmark evaluations, applications, and challenges of large vision language models: A survey. arXiv 2025, arXiv:2501.02189. [Google Scholar]
- Radford, A.; Kim, J.W.; Hallacy, C.; Ramesh, A.; Goh, G.; Agarwal, S.; Sastry, G.; Askell, A.; Mishkin, P.; Clark, J.; et al. Learning transferable visual models from natural language supervision. In Proceedings of the International Conference on Machine Learning, PmLR, Virtual, 18–24 July 2021; pp. 8748–8763. [Google Scholar]
- Ataallah, K.; Shen, X.; Abdelrahman, E.; Sleiman, E.; Zhu, D.; Ding, J.; Elhoseiny, M. Minigpt4-video: Advancing multimodal llms for video understanding with interleaved visual-textual tokens. arXiv 2024, arXiv:2404.03413. [Google Scholar]
- Cheng, Z.; Leng, S.; Zhang, H.; Xin, Y.; Li, X.; Chen, G.; Zhu, Y.; Zhang, W.; Luo, Z.; Zhao, D.; et al. Videollama 2: Advancing spatial-temporal modeling and audio understanding in video-llms. arXiv 2024, arXiv:2406.07476. [Google Scholar]
- Li, J.; Li, D.; Savarese, S.; Hoi, S. Blip-2: Bootstrapping language-image pre-training with frozen image encoders and large language models. In Proceedings of the International Conference on Machine Learning, PMLR, Honolulu, HI, USA, 23–29 July 2023; pp. 19730–19742. [Google Scholar]
- Raffel, C.; Shazeer, N.; Roberts, A.; Lee, K.; Narang, S.; Matena, M.; Zhou, Y.; Li, W.; Liu, P.J. Exploring the limits of transfer learning with a unified text-to-text transformer. J. Mach. Learn. Res. 2020, 21, 1–67. [Google Scholar]
- Arceda, V.M.; Riveros, E.L. Fast car crash detection in video. In Proceedings of the 2018 CLEI, Sao Paulo, Brazil, 1–5 October 2018; IEEE: New York, NY, USA, 2018; pp. 632–637. [Google Scholar]
- Noor, A.; Benjdira, B.; Ammar, A.; Koubaa, A. DriftNet: Aggressive Driving Behaviour Detection using 3D CNNs. In Proceedings of the 2020 SMARTTECH, Riyadh, Saudi Arabia, 3–5 November 2020; IEEE: New York, NY, USA, 2020; pp. 214–219. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | No. of Frames | Accident Types | #Frames |
|---|---|---|---|
| Daylight | 9796 | Weaving through traffic | 2417 |
| Night/low light | 1487 | X-section accidents | 6566 |
| Foggy | 445 | Tailgating/driving maneuvers | 1452/305 |
| Rainy/snowy | 128/274 | Highway/rear-end accidents | 1254/1215 |
| Camera too far | 211 | Pedestrian accidents | 447 |
| Dataset | Total No. of Videos | Frames/Video | Camera Resolution | View Depth | Weather Conditions | FG/BG Activity |
|---|---|---|---|---|---|---|
| DAD | 1730 | 100 | No | No | No | Yes/No |
| CADP | 1416 | 366 | Yes | Yes | Yes | Yes/No |
| TU-DAT | 280 | 960 | Yes | Yes | Yes | Yes/Yes |
| AI-City | 250 | 2400 | Yes | Yes | No | Yes/No |
| VLM Models | Undirected | Directed | ||
|---|---|---|---|---|
| VLMm | VLMa | VLMm | VLMa | |
| X-CLIP | 54.5 | 55.15 | 74.25 | 73.65 |
| VideoMAE | 52.04 | 52.41 | 72.65 | 73.25 |
| MiniGPT4 | 59.78 | 60.41 | 75.51 | 74.35 |
| MiniGPT4-Video | 71.45 | 71.8 | 86.35 | 85.125 |
| Video-Llama | 72.16 | 72.41 | 86.85 | 87.32 |
| VideoMamba | 61.95 | 61.41 | 80.85 | 80.4 |
| Test Dataset | Model Architecture | Average Precision (AP) | F1 Score |
|---|---|---|---|
| CADP | VLM (TU-DAT-trained) | 87.4% | 0.843 |
| DAD | VLM (TU-DAT-trained) | 83.1% | 0.812 |
| AI-City | VLM (TU-DAT-trained) | 81.8% | 0.794 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradeep Kumar, P.; Kant, K. TU-DAT: A Computer Vision Dataset on Road Traffic Anomalies. Sensors 2025, 25, 3259. https://doi.org/10.3390/s25113259
Pradeep Kumar P, Kant K. TU-DAT: A Computer Vision Dataset on Road Traffic Anomalies. Sensors. 2025; 25(11):3259. https://doi.org/10.3390/s25113259
Chicago/Turabian StylePradeep Kumar, Pavana, and Krishna Kant. 2025. "TU-DAT: A Computer Vision Dataset on Road Traffic Anomalies" Sensors 25, no. 11: 3259. https://doi.org/10.3390/s25113259
APA StylePradeep Kumar, P., & Kant, K. (2025). TU-DAT: A Computer Vision Dataset on Road Traffic Anomalies. Sensors, 25(11), 3259. https://doi.org/10.3390/s25113259