
On the Effect of Layering Velostat on Force Sensing for Hands


Abstract

1. Introduction
2. Motivation
- 1.
- They should be low cost (with a per-sensor cost comparable to or less than that of a typical FSR commercial sensor);
- 2.
- They should offer measurements at least as accurate as those that can be obtained from FSR sensors;
- 3.
- They should be easily customized with minimal fabrication effort.
3. Hardware
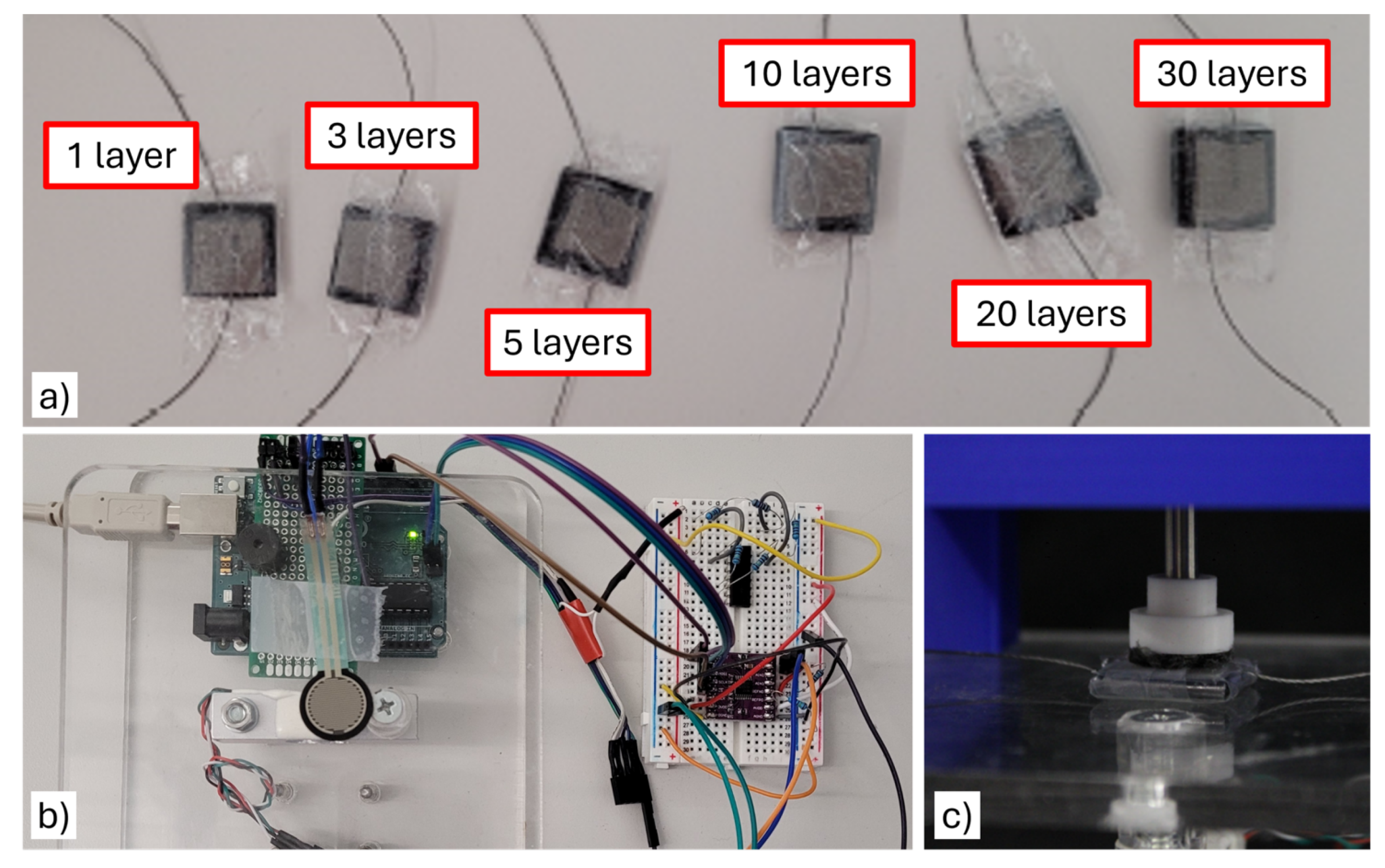
3.1. Sensing Unit Construction
3.2. Sensor Reading Circuit
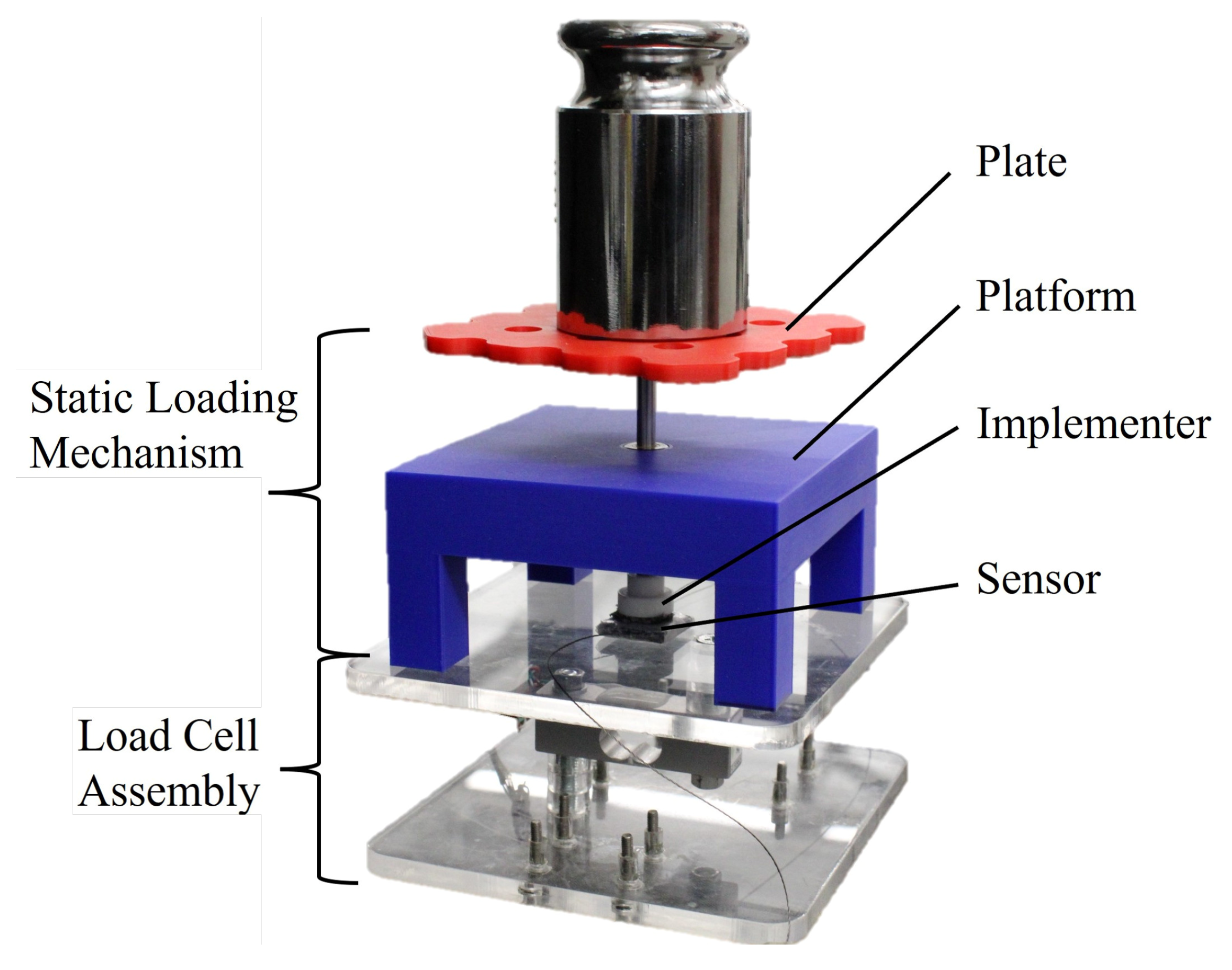
3.3. Load Cell and Loading Platform
3.4. Continuous Load Application Mechanism
3.5. Velostat Conditioning and Calibration
4. Experimental Evaluation
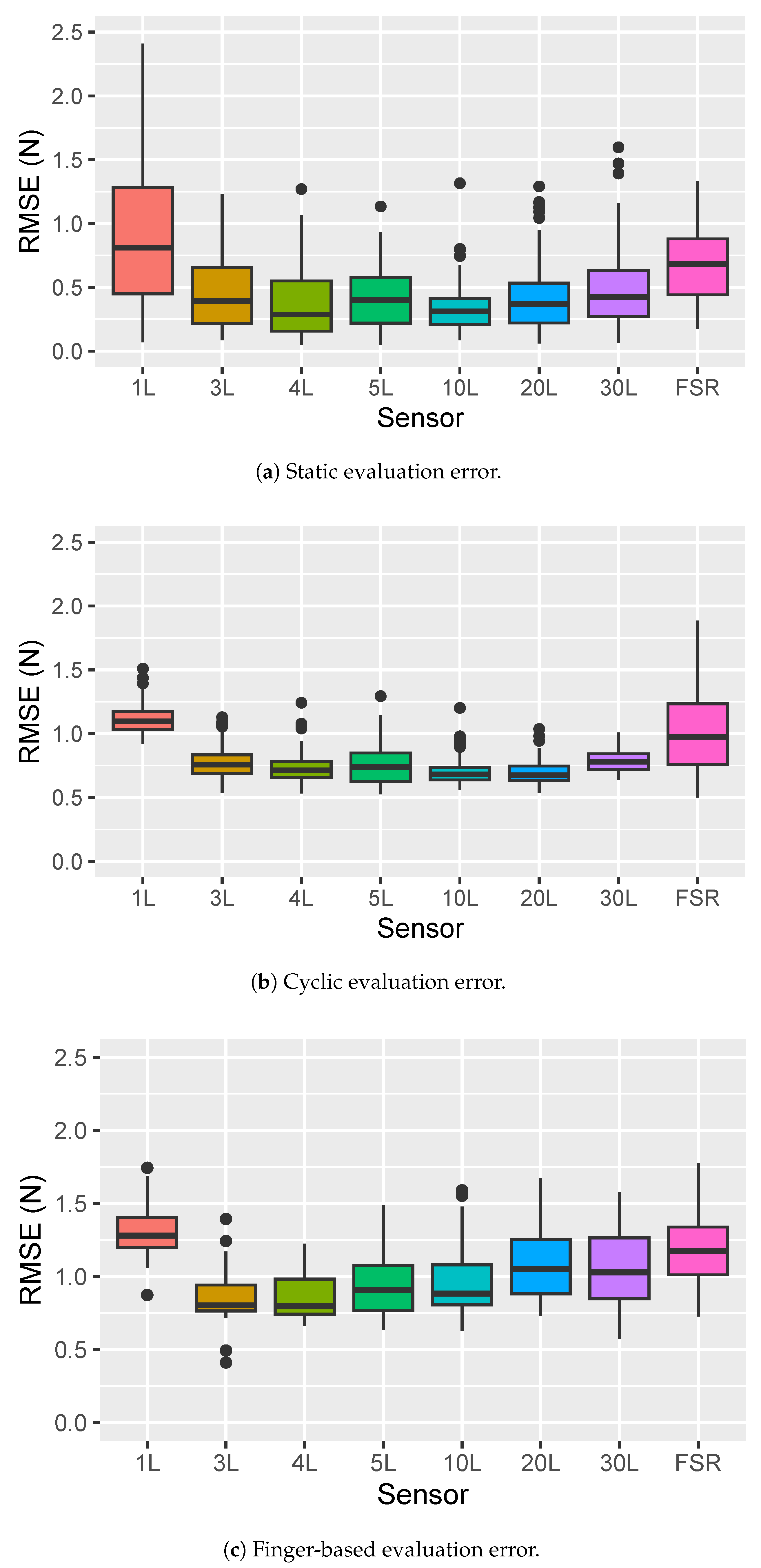
4.1. Static Loading Evaluation
4.2. Cyclic Evaluation
4.3. Finger Evaluation
5. Results
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Culbertson, H.; Schorr, S.B.; Okamura, A.M. Haptics: The present and future of artificial touch sensation. Annu. Rev. Control. Robot. Auton. Syst. 2018, 1, 385–409. [Google Scholar] [CrossRef]
- Dargahi, J.; Najarian, S. Human tactile perception as a standard for artificial tactile sensing—A review. Int. J. Med. Robot. Comput. Assist. Surg. 2004, 1, 23–35. [Google Scholar] [CrossRef]
- Sundaram, S.; Kellnhofer, P.; Li, Y.; Zhu, J.Y.; Torralba, A.; Matusik, W. Learning the signatures of the human grasp using a scalable tactile glove. Nature 2019, 569, 698–702. [Google Scholar] [CrossRef]
- Cutkosky, M.R.; Provancher, W. Force and tactile sensing. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 717–736. [Google Scholar]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Battaglia, E.; Bianchi, M.; Altobelli, A.; Grioli, G.; Catalano, M.G.; Serio, A.; Santello, M.; Bicchi, A. Thimblesense: A fingertip-wearable tactile sensor for grasp analysis. IEEE Trans. Haptics 2015, 9, 121–133. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Millar, M.; Edmonds, M.; Gao, F.; Zhu, Y.; Santos, V.J.; Rothrock, B.; Zhu, S.C. A glove-based system for studying hand-object manipulation via joint pose and force sensing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6617–6624. [Google Scholar]
- Moscatelli, A.; Bianchi, M.; Serio, A.; Terekhov, A.; Hayward, V.; Ernst, M.O.; Bicchi, A. The change in fingertip contact area as a novel proprioceptive cue. Curr. Biol. 2016, 26, 1159–1163. [Google Scholar] [CrossRef]
- Xu, J.; Pan, J.; Cui, T.; Zhang, S.; Yang, Y.; Ren, T.L. Recent progress of tactile and force sensors for human–machine interaction. Sensors 2023, 23, 1868. [Google Scholar] [CrossRef]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sensors Actuators Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Reyes, L.R.; Gavino, P.; Zheng, Y.; Boehm, J.; Yeatman, M.; Hegde, S.; Park, C.; Battaglia, E.; Fey, A.M. Towards telementoring for needle insertion: Effects of haptic and visual feedback on mentor perception of trainee forces. In Proceedings of the 2022 IEEE Haptics Symposium (HAPTICS), Santa Barbara, CA, USA, 21–24 March 2022; pp. 1–7. [Google Scholar]
- Luo, Y.; Liu, C.; Lee, Y.J.; DelPreto, J.; Wu, K.; Foshey, M.; Rus, D.; Palacios, T.; Li, Y.; Torralba, A.; et al. Adaptive tactile interaction transfer via digitally embroidered smart gloves. Nat. Commun. 2024, 15, 868. [Google Scholar] [CrossRef]
- Battaglia, E.; Fey, A.M. Cartesian space vibrotactile cues outperform tool space cues when moving from 2d to 3d needle insertion task. In Proceedings of the 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Republic of Korea, 21–24 August 2022; pp. 1–6. [Google Scholar]
- Reyes, L.R.; Park, C.; Battaglia, E.; Fey, A.M. Verbal Outperforms Cartesian Tactile Guidance in Telementored Needle Insertion Training. In Proceedings of the 2024 IEEE Haptics Symposium (HAPTICS), Long Beach, CA, USA, 7–10 April 2024; pp. 157–162. [Google Scholar]
- Liu, Y.; Wo, H.; Huang, S.; Huo, Y.; Xu, H.; Zhan, S.; Li, M.; Zeng, X.; Jin, H.; Zhang, L.; et al. A flexible capacitive 3D tactile sensor with cross-shaped capacitor plate pair and composite structure dielectric. IEEE Sens. J. 2020, 21, 1378–1385. [Google Scholar] [CrossRef]
- Cho, S.H.; Lee, S.W.; Yu, S.; Kim, H.; Chang, S.; Kang, D.; Hwang, I.; Kang, H.S.; Jeong, B.; Kim, E.H.; et al. Micropatterned pyramidal ionic gels for sensing broad-range pressures with high sensitivity. ACS Appl. Mater. Interfaces 2017, 9, 10128–10135. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, R.; Ji, C.; Pei, Z.; Fu, Z.; Liu, Y.; Sang, S.; Hao, R.; Zhang, Q. Bioinspired crocodile skin-based flexible piezoelectric sensor for three-dimensional force detection. IEEE Sens. J. 2023, 23, 21050–21060. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, T.; Li, Y.; Wei, D.; Tao, B.; Yin, Z.; Zhang, C.; Wu, H. Multidimensional force sensors based on triboelectric nanogenerators for electronic skin. ACS Appl. Mater. Interfaces 2021, 13, 56320–56328. [Google Scholar] [CrossRef]
- Tee, B.C.K.; Chortos, A.; Berndt, A.; Nguyen, A.K.; Tom, A.; McGuire, A.; Lin, Z.C.; Tien, K.; Bae, W.G.; Wang, H.; et al. A skin-inspired organic digital mechanoreceptor. Science 2015, 350, 313–316. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, W.; Kim, J.J.; Wang, C.; Wang, Y.; Wang, B.; Lee, S.; Yokota, T.; Someya, T. An optical-based multipoint 3-axis pressure sensor with a flexible thin-film form. Sci. Adv. 2023, 9, eadi2445. [Google Scholar] [CrossRef]
- Tolvanen, J.; Hannu, J.; Jantunen, H. Hybrid foam pressure sensor utilizing piezoresistive and capacitive sensing mechanisms. IEEE Sens. J. 2017, 17, 4735–4746. [Google Scholar] [CrossRef]
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic skin: Recent progress and future prospects for skin-attachable devices for health monitoring, robotics, and prosthetics. Adv. Mater. 2019, 31, 1904765. [Google Scholar] [CrossRef]
- Saari, M.; Xia, B.; Cox, B.; Krueger, P.S.; Cohen, A.L.; Richer, E. Fabrication and analysis of a composite 3D printed capacitive force sensor. 3D Print. Addit. Manuf. 2016, 3, 136–141. [Google Scholar] [CrossRef]
- Hopkins, M.; Vaidyanathan, R.; Mcgregor, A.H. Examination of the performance characteristics of velostat as an in-socket pressure sensor. IEEE Sens. J. 2020, 20, 6992–7000. [Google Scholar] [CrossRef]
- Bhar, I.; Mandal, N. Design of a wireless passive pressure measurement system using piezoresistive materials. IEEE Sens. J. 2022, 22, 21518–21526. [Google Scholar] [CrossRef]
- Konstantinova, J.; Jiang, A.; Althoefer, K.; Dasgupta, P.; Nanayakkara, T. Implementation of tactile sensing for palpation in robot-assisted minimally invasive surgery: A review. IEEE Sens. J. 2014, 14, 2490–2501. [Google Scholar] [CrossRef]
- El Rassi, I.; El Rassi, J.M. A review of haptic feedback in tele-operated robotic surgery. J. Med. Eng. Technol. 2020, 44, 247–254. [Google Scholar] [CrossRef]
- Dzedzickis, A.; Sutinys, E.; Bucinskas, V.; Samukaite-Bubniene, U.; Jakstys, B.; Ramanavicius, A.; Morkvenaite-Vilkonciene, I. Polyethylene-carbon composite (Velostat®) based tactile sensor. Polymers 2020, 12, 2905. [Google Scholar] [CrossRef]
- Zhang, Y.; Zeng, J.; Wang, Y.; Jiang, G. Flexible Three-Dimensional Force Tactile Sensor Based on Velostat Piezoresistive Films. Micromachines 2024, 15, 486. [Google Scholar] [CrossRef]
- Fonseca, D.; Safeea, M.; Neto, P. A flexible piezoresistive/self-capacitive hybrid force and proximity sensor to interface collaborative robots. IEEE Trans. Ind. Inform. 2022, 19, 2485–2495. [Google Scholar] [CrossRef]
- Ramesh, D.; Fu, Q.; Li, C. SenSnake: A snake robot with contact force sensing for studying locomotion in complex 3-D terrain. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 2068–2075. [Google Scholar]
- Suprapto, S.; Setiawan, A.; Zakaria, H.; Adiprawita, W.; Supartono, B. Low-cost pressure sensor matrix using velostat. In Proceedings of the 2017 5th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 6–7 November 2017; pp. 137–140. [Google Scholar]
- Laaraibi, A.R.A.; Jodin, G.; Hoareau, D.; Bideau, N.; Razan, F. Flexible dynamic pressure sensor for insole based on inverse viscoelastic model. IEEE Sens. J. 2023, 23, 7634–7643. [Google Scholar] [CrossRef]
- Chen, C.; Shi, H.; González-Afanador, I.; Sepúlveda, N.; Tan, X. Rapid Fabrication of Flexible Pressure Sensor Array. IEEE Sens. Lett. 2023, 7, 1–4. [Google Scholar] [CrossRef]
- Del Prete, Z.; Monteleone, L.; Steindler, R. A novel pressure array sensor based on contact resistance variation: Metrological properties. Rev. Sci. Instrum. 2001, 72, 1548–1553. [Google Scholar] [CrossRef]
- Giovanelli, D.; Farella, E. Force sensing resistor and evaluation of technology for wearable body pressure sensing. J. Sens. 2016, 2016, 9391850. [Google Scholar] [CrossRef]
- Salibindla, S.; Ripoche, B.; Lai, D.T.; Maas, S. Characterization of a new flexible pressure sensor for body sensor networks. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 2–5 April 2013; pp. 27–31. [Google Scholar]
- Kalantari, M.; Dargahi, J.; Kövecses, J.; Mardasi, M.G.; Nouri, S. A new approach for modeling piezoresistive force sensors based on semiconductive polymer composites. IEEE ASME Trans. Mechatronics 2011, 17, 572–581. [Google Scholar] [CrossRef]
- Johansson, R.S.; Häger, C.; Riso, R. Somatosensory control of precision grip during unpredictable pulling loads: II. Changes in load force rate. Exp. Brain Res. 1992, 89, 192–203. [Google Scholar] [CrossRef] [PubMed]
- Flanagan, J.R.; Tresilian, J.; Wing, A.M. Coupling of grip force and load force during arm movements with grasped objects. Neurosci. Lett. 1993, 152, 53–56. [Google Scholar] [CrossRef] [PubMed]
- Interlink Electronics Inc. FSR Integration Guide and Evaluation Parts Catalog with Suggested Electrical Interfaces. Available online: https://www.sparkfun.com/datasheets/Sensors/Pressure/fsrguide.pdf (accessed on 3 April 2025).
- Delacre, M.; Leys, C.; Mora, Y.L.; Lakens, D. Taking parametric assumptions seriously: Arguments for the use of Welch’s F-test instead of the classical F-test in one-way ANOVA. Int. Rev. Soc. Psychol. 2019, 32, 13. [Google Scholar] [CrossRef]
- Liu, H. Comparing Welch ANOVA, a Kruskal-Wallis Test, and Traditional ANOVA in Case of Heterogeneity of Variance. Ph.D. Thesis, Virginia Commonwealth University, Richmond, VA, USA, 2015. [Google Scholar]
- Gramm, J.; Guo, J.; Hüffner, F.; Niedermeier, R.; Piepho, H.P.; Schmid, R. Algorithms for compact letter displays: Comparison and evaluation. Comput. Stat. Data Anal. 2007, 52, 725–736. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | 1 L | 3 L, 4 L, 5 L | 10 L | 20 L, 30 L | FSR |
| Bias Resistor | 30 Ω | 100 Ω | 1 kΩ | 3 kΩ | 10 kΩ |
| (a) Results for the Static Evaluation. | |||||||
|---|---|---|---|---|---|---|---|
| Mean RMSE (N) | |||||||
| a | b | c | c d | d e | e | ||
| 0.89 | 0.66 | 0.50 | 0.46 | 0.43 | 0.41 | 0.38 | 0.33 |
| 1 L | FSR | 30 L | 3 L | 20 L | 5 L | 4 L | 10 L |
| 1 L | 0.00077 | ||||||
| FSR | - | 0.00073 | |||||
| 30 L | - | - | 1.00 | 0.446 | 0.0765 | 0.0199 | |
| 3 L | - | - | - | 1.00 | 0.700 | 0.226 | 0.00053 |
| 20 L | - | - | - | - | 1.00 | 0.887 | 0.0188 |
| 5 L | - | - | - | - | - | 1.00 | 0.0378 |
| 4 L | - | - | - | - | - | - | 0.700 |
| (Holm correction) | |||||||
| (b) Results for the Cyclic Evaluation. | |||||||
| Mean RMSE (N) | |||||||
| a | b | b c | c | ||||
| 1.11 | 1.03 | 0.79 | 0.78 | 0.75 | 0.73 | 0.71 | 0.70 |
| 1 L | FSR | 30 L | 3 L | 5 L | 4 L | 10 L | 20 L |
| 1 L | 0.1380 | ||||||
| FSR | - | ||||||
| 30 L | - | - | 1.00 | 0.61 | 0.013 | ||
| 3 L | - | - | - | 1.00 | 0.138 | ||
| 5 L | - | - | - | - | 1.00 | 0.189 | 0.021 |
| 4 L | - | - | - | - | - | 0.814 | 0.138 |
| 10 L | - | - | - | - | - | - | 1.00 |
| (Holm correction) | |||||||
| (c) Results for the Finger Evaluation. | |||||||
| Mean RMSE (N) | |||||||
| a | ab | bc | c d | d | |||
| 1.32 | 1.17 | 1.08 | 1.07 | 0.96 | 0.94 | 0.87 | 0.86 |
| 1 L | FSR | 20 L | 30 L | 10 L | 5 L | 3 L | 4 L |
| 1 L | 0.322 | 0.0051 | 0.0024 | ||||
| FSR | - | 0.796 | 0.796 | 0.0346 | 0.0077 | ||
| 20 L | - | - | 1.00 | 0.61 | 0.286 | 0.0055 | 0.0024 |
| 30 L | - | - | - | 0.751 | 0.360 | 0.0077 | 0.0032 |
| 10 L | - | - | - | - | 1.00 | 0.751 | 0.587 |
| 5 L | - | - | - | - | - | 0.796 | 0.751 |
| 3 L | - | - | - | - | - | - | 1.00 |
| (Holm correction) | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bartunek, T.; Fey, A.M.; Battaglia, E. On the Effect of Layering Velostat on Force Sensing for Hands. Sensors 2025, 25, 3245. https://doi.org/10.3390/s25103245
Bartunek T, Fey AM, Battaglia E. On the Effect of Layering Velostat on Force Sensing for Hands. Sensors. 2025; 25(10):3245. https://doi.org/10.3390/s25103245
Chicago/Turabian StyleBartunek, Tyler, Ann Majewicz Fey, and Edoardo Battaglia. 2025. "On the Effect of Layering Velostat on Force Sensing for Hands" Sensors 25, no. 10: 3245. https://doi.org/10.3390/s25103245
APA StyleBartunek, T., Fey, A. M., & Battaglia, E. (2025). On the Effect of Layering Velostat on Force Sensing for Hands. Sensors, 25(10), 3245. https://doi.org/10.3390/s25103245