
Quantitative Evaluation of Focus Measure Operators in Optical Microscopy


Abstract
1. Introduction
2. Design of Quantitative Metrics
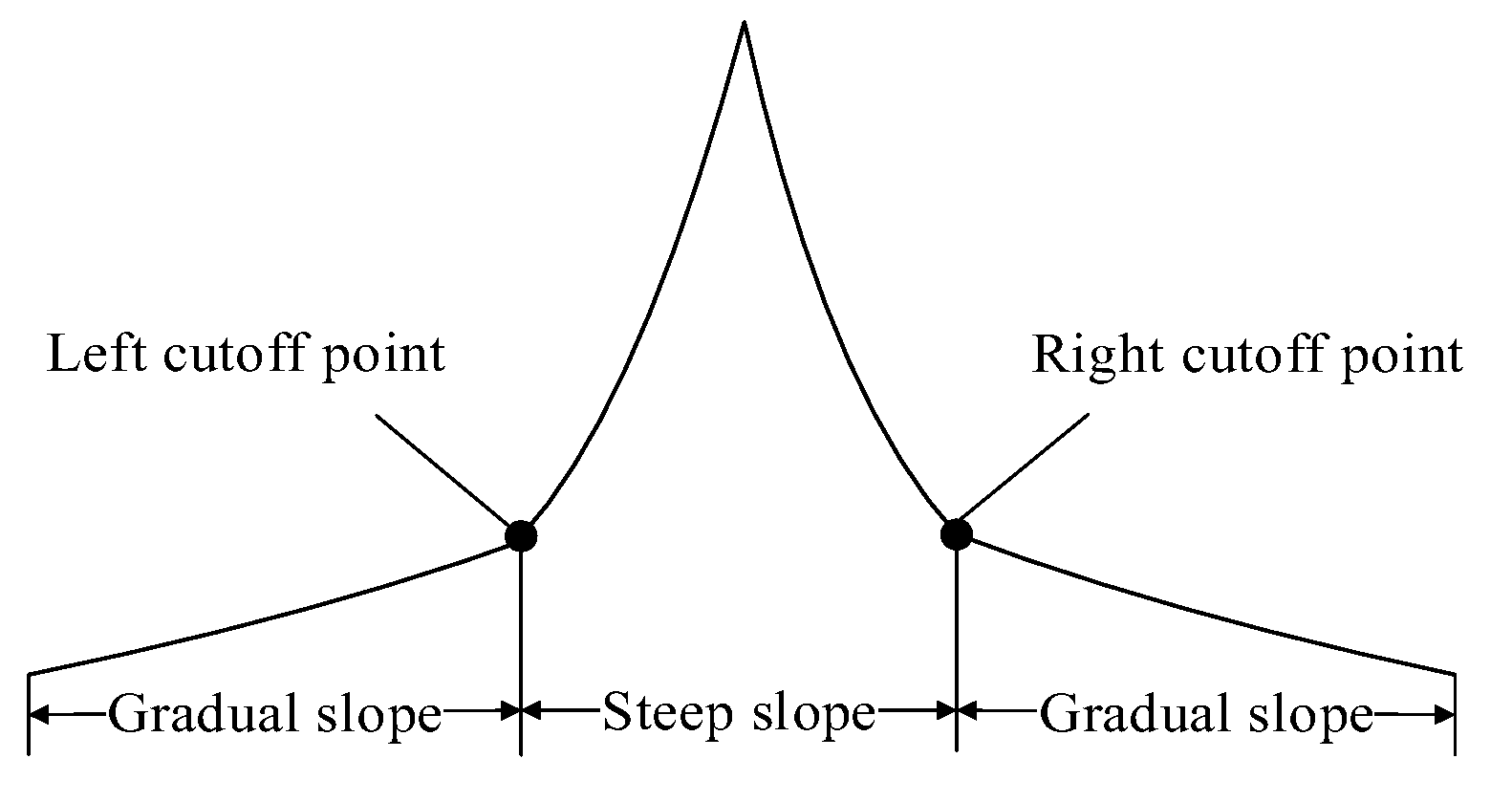
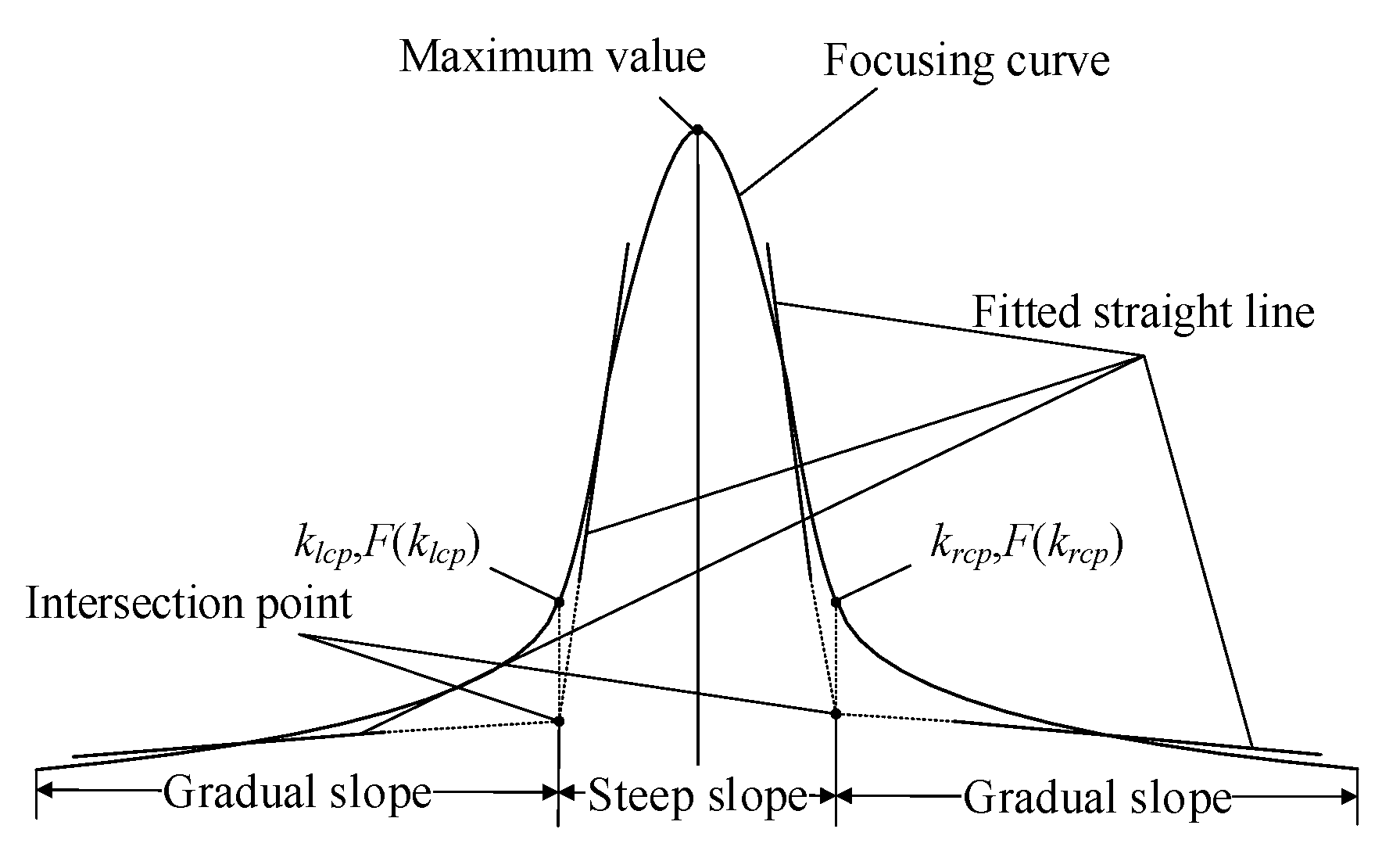
2.1. Selection of the Cutoff Point
2.2. Steep Slope Region Width (Ws)
2.3. Steep to Gradual Ratio (Rsg)
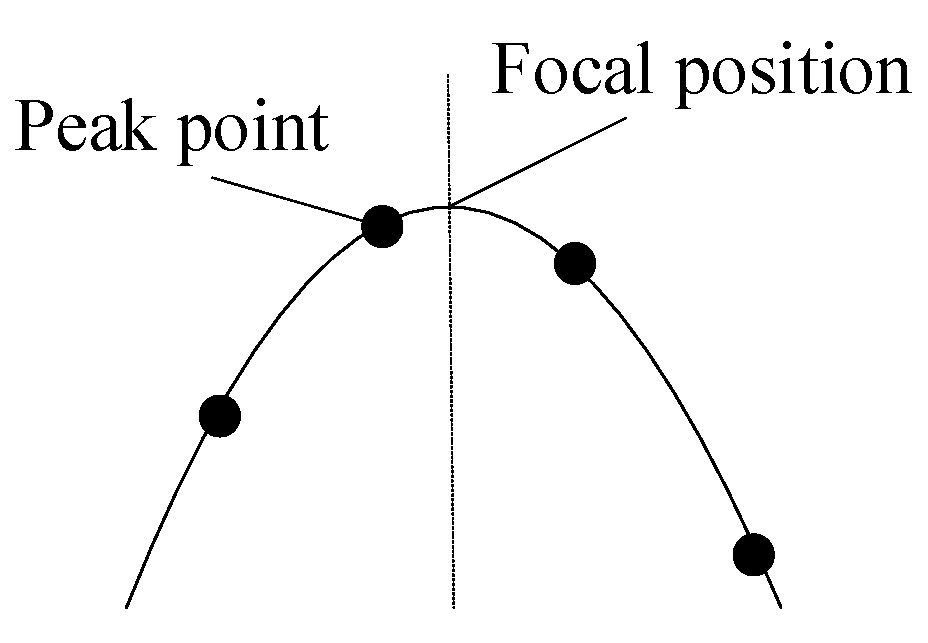
2.4. Curvature at Peak (Cp)
2.5. Relative Root Mean Square Error (RRMSE)
3. Focus Measure Operators
- (1)
- SMD
- (2)
- Roberts
- (3)
- Tenengrad
- (4)
- Brenner
- (5)
- EOG
- (6)
- EOL
- (7)
- SML
- (8)
- Variance
- (9)
- Vollath’s
- (10)
- Fourier transform based operator
- (11)
- Discrete Cosine Transform-based operator
- (12)
- Wavelet Transform-based operator
4. Experimental Analyses
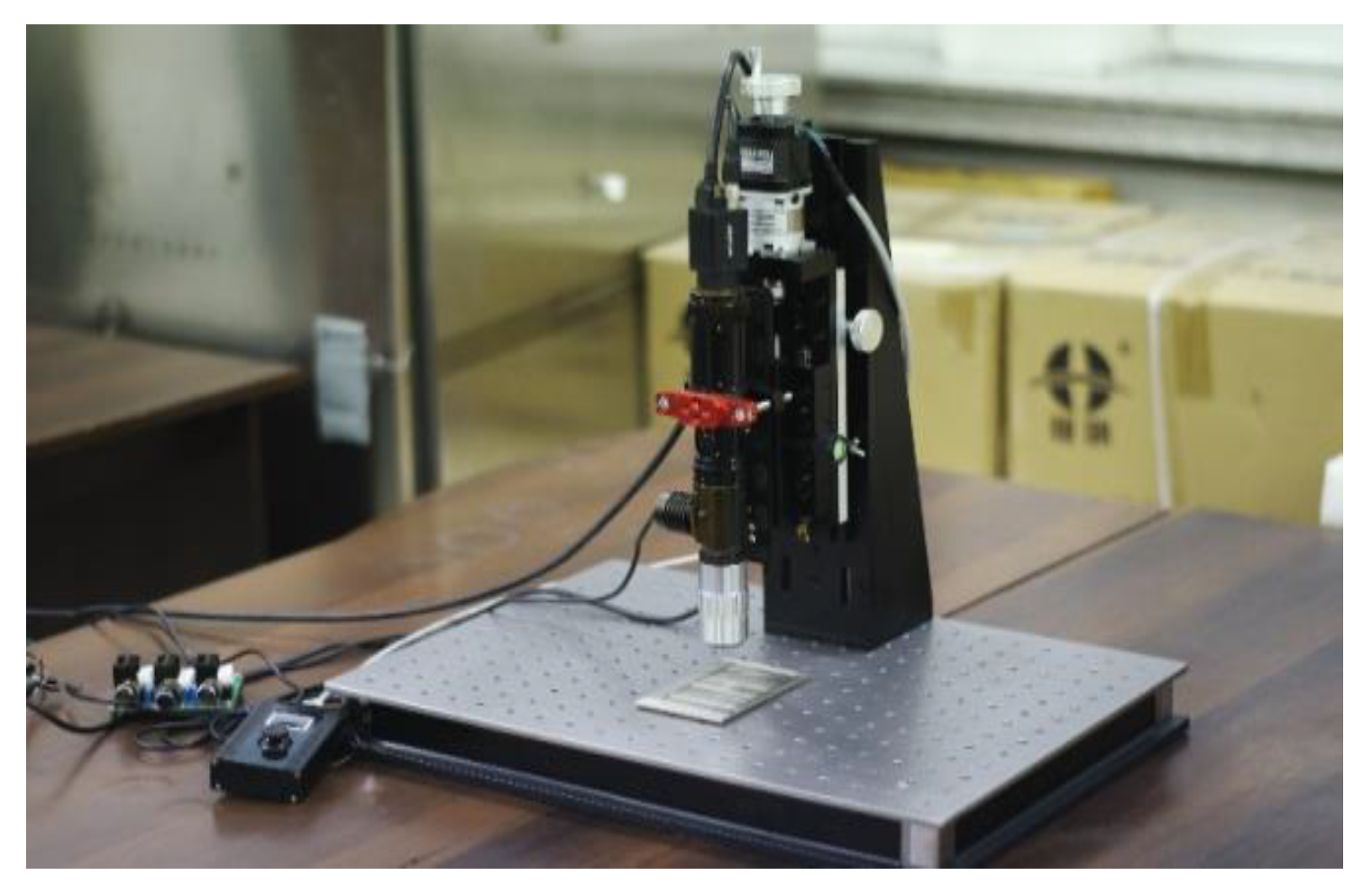
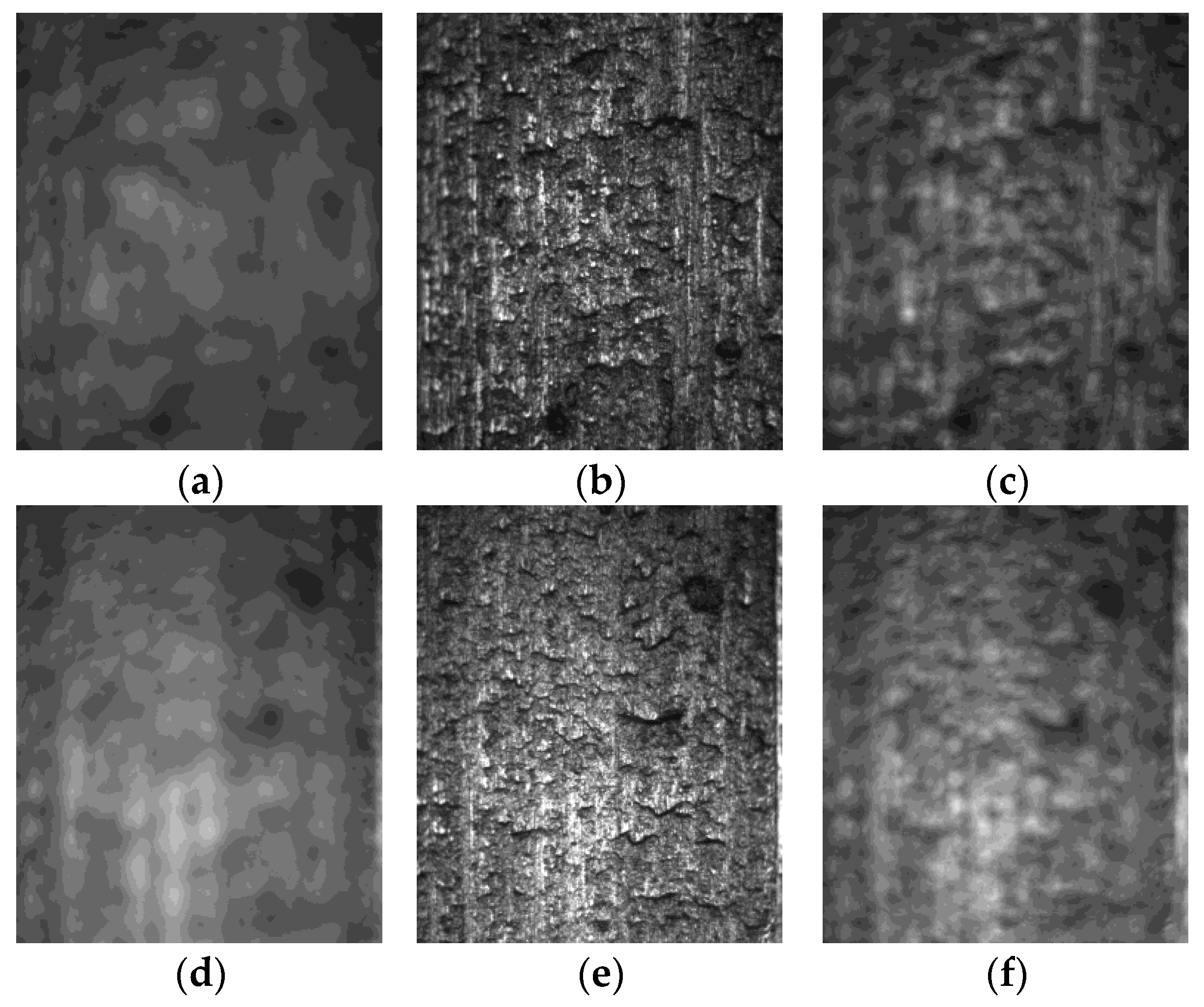
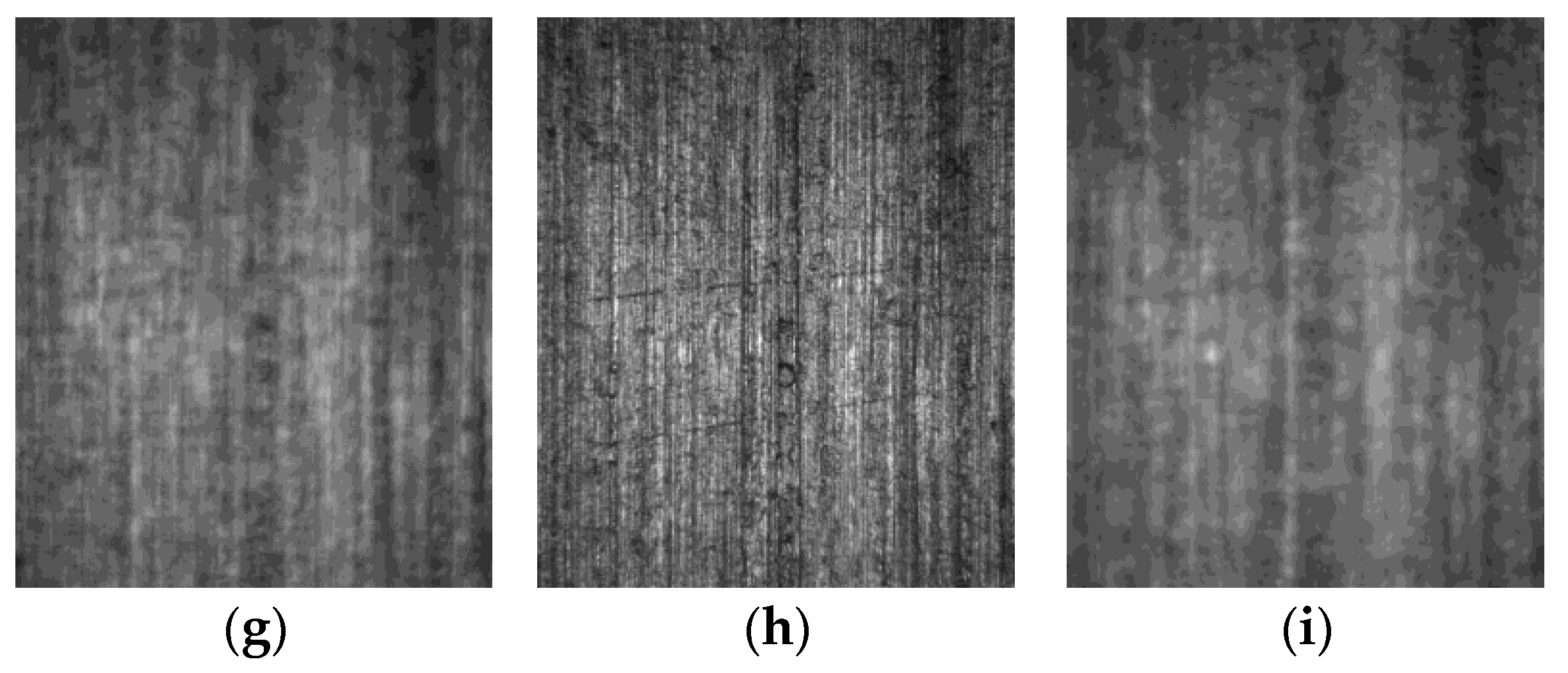
4.1. Image Acquisitionc
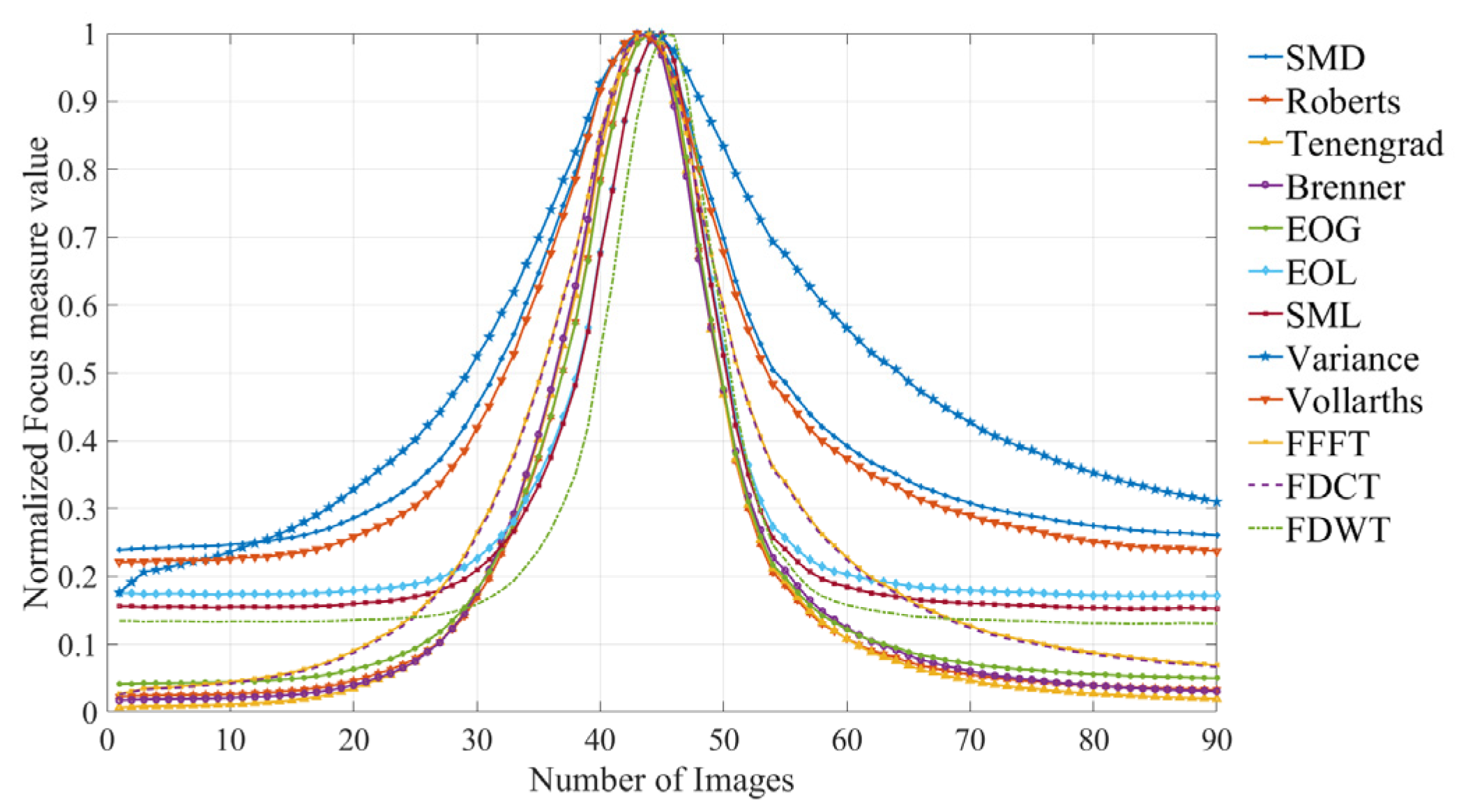
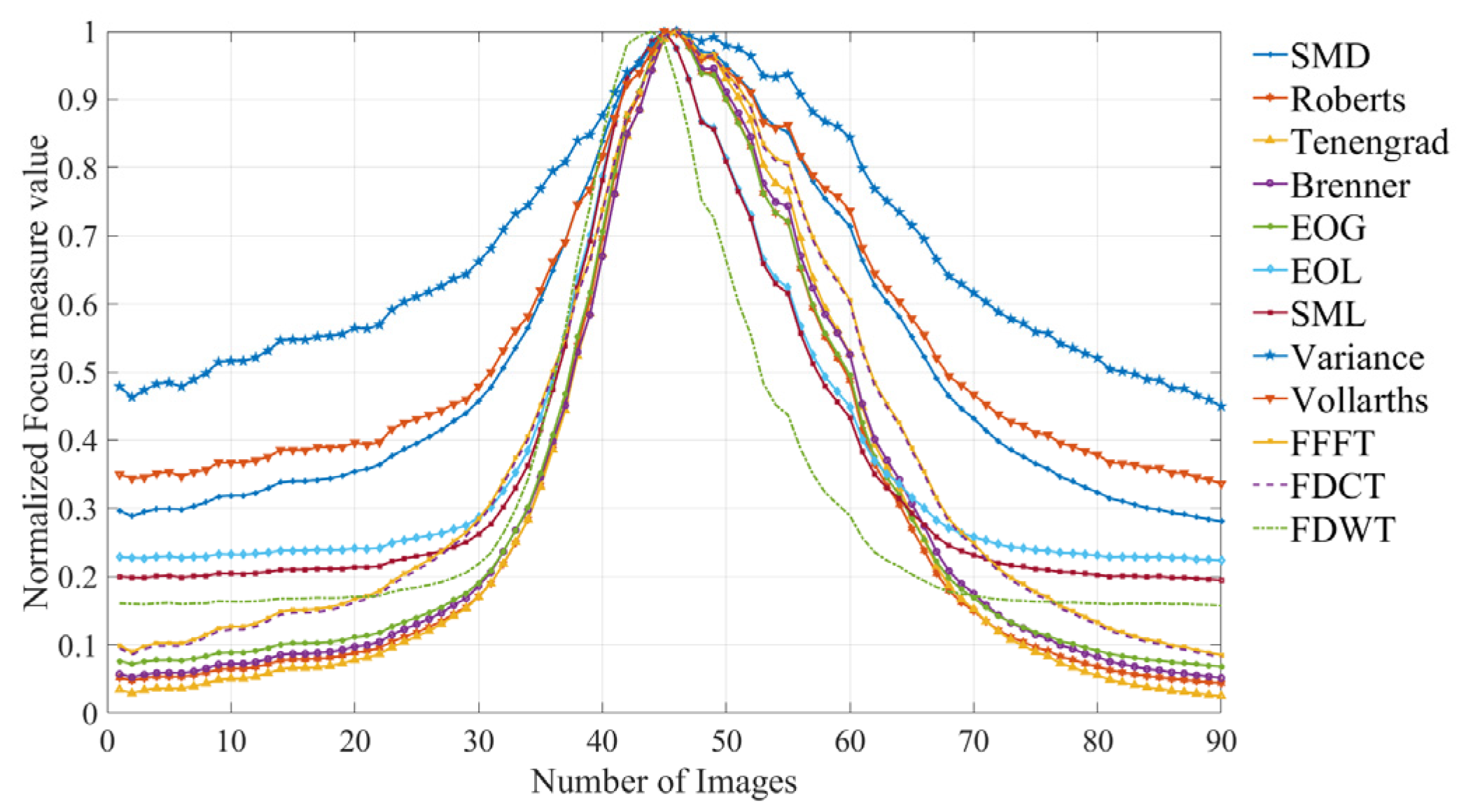
4.2. Analysis of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, Z.; Zhou, P.; Zhu, J.; Zhang, J. Improved shape-from-focus reconstruction for high dynamic range freedom surface. Opt. Lasers Eng. 2023, 170, 107784. [Google Scholar] [CrossRef]
- Yang, C.; Chen, M.; Zhou, F.; Li, W.; Peng, Z. Accurate and rapid auto-focus methods based on image quality assessment for telescope observation. Appl. Sci. 2020, 10, 658. [Google Scholar] [CrossRef]
- Nayar, S.K.; Nakagawa, Y. Shape from focus. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 824–831. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, K.; Jia, H.; Jia, P.; Zhang, X. Shape-from-focus reconstruction using block processing followed by local heat-diffusion-based refinement. Opt. Lasers Eng. 2023, 170, 107754. [Google Scholar] [CrossRef]
- Russell, M.J.; Douglas, T.S. Evaluation of autofocus algorithms for tuberculosis microscopy. In Proceedings of the 29th Annual International Conference of the IEEE-Engineering-in-Medicine-and-Biology-Society, Lyon, France, 22–26 August 2007. [Google Scholar] [CrossRef]
- Zhang, L.; Tian, Y.; Yin, Y. An improved image sharpness assessment method based on contrast sensitivity. In Proceedings of the Conference on Applied Optics and Photonics (AOPC)—Image Processing and Analysis, Beijing, China, 5–7 May 2015. [Google Scholar] [CrossRef]
- He, C.; Li, X.; Hu, Y.; Ye, Z.; Kang, H. Microscope images automatic focus algorithm based on eight-neighborhood operator and least square planar fitting. Optik 2020, 206, 164232. [Google Scholar] [CrossRef]
- Bi, T.; Du, W. Improved Brenner definition evaluation function. Electron. Meas. Technol. 2019, 42, 80–84. [Google Scholar]
- Helmy, I.; Choi, W. Region of interest selection-based autofocusing for high magnification systems. IEEE Trans. Comput. Imaging 2023, 9, 1098–1110. [Google Scholar] [CrossRef]
- Yan, T.; Hu, Z.; Qian, Y.; Qiao, Z.; Zhang, L. 3D shape reconstruction from multifocus image fusion using a multidirectional modified Laplacian operator. Pattern Recognit. 2020, 98, 107065. [Google Scholar] [CrossRef]
- Jang, H.-S.; Yun, G.; Mutahira, H.; Muhammad, M.S. A new focus measure operator for enhancing image focus in 3D shape recovery. Microsc. Res. Tech. 2021, 84, 2483–2493. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.-R.; Liu, J.; Ye, Z.; Shen, L.; Zhuang, X. Enhancing noise robustness in focus measure using tight framelet features. IEEE Signal Process. Lett. 2025, 32, 1435–1439. [Google Scholar] [CrossRef]
- Fu, B.; He, R.; Yuan, Y.; Jia, W.; Yang, S.; Liu, F. Shape from focus using gradient of focus measure curve. Opt. Lasers Eng. 2023, 160, 107320. [Google Scholar] [CrossRef]
- Wang, Y.; Jia, H.; Jia, P.; Chen, K.; Zhang, X. A novel algorithm for three-dimensional shape reconstruction for microscopic objects based on shape from focus. Opt. Laser Technol. 2024, 168, 109931. [Google Scholar] [CrossRef]
- Wu, A.; Lu, R.-S.; Li, M. A novel focus measure algorithm for three-dimensional microscopic vision measurement based on focus stacking. Sens. Actuators A Phys. 2024, 376, 115657. [Google Scholar] [CrossRef]
- Groen, F.C.; Young, I.T.; Ligthart, G. A comparison of different focus functions for use in autofocus algorithms. Cytometry 1985, 6, 81–91. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Duthaler, S.; Nelson, B.J. Autofocusing algorithm selection in computer microscopy. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, Canada, 2–6 August 2005. [Google Scholar] [CrossRef]
- Sun, J.; Yuan, Y.; Wang, C. Comparison and analysis of algorithms for digital image processing in autofocusing criterion. Acta Opt. Sin. 2007, 27, 35–39. [Google Scholar]
- Zhai, Y.; Zhou, D.; Liu, Y.; Liu, S.; Peng, K. Design of evaluation index for auto-focusing function and optimal function selection. Acta Opt. Sin. 2011, 31, 242–252. [Google Scholar] [CrossRef]
- Pertuz, S.; Puig, D.; Angel Garcia, M. Analysis of focus measure operators for shape-from-focus. Pattern Recognit. 2013, 46, 1415–1432. [Google Scholar] [CrossRef]
- Shang, M.; Yu, F. Research on microscopic 3D measurement system based on focus variation. Laser Optoelectron. Prog. 2021, 58, 1600002. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ws | Rsg | Cp | RRMSE | FWHM | Sp | Time/ms | |
|---|---|---|---|---|---|---|---|
| SMD | 7.91 (10) | 3.4821 (8) | 0.2196 (11) | 0.4870 (8) | 7.11 (11) | 0.1100 (11) | 24.4 (4) |
| Roberts | 6.71 (5) | 4.6123 (7) | 0.4374 (6) | 0.3287 (6) | 4.03 (4) | 0.2194 (6) | 25.0 (5) |
| Tenengrad | 6.94 (6) | 4.6608 (5) | 0.4099 (7) | 0.0726 (2) | 4.19 (6) | 0.2058 (7) | 31.9 (7) |
| Brenner | 7.26 (7) | 5.0280 (4) | 0.4432 (4) | 0.2002 (5) | 4.27 (7) | 0.2216 (4) | 23.5 (3) |
| EOG | 6.65 (4) | 4.6285 (6) | 0.4416 (5) | 0.6012 (9) | 4.03 (4) | 0.2214 (5) | 26.8 (6) |
| EOL | 5.58 (2) | 7.6830 (2) | 0.5273 (3) | 2.9718 (11) | 3.52 (3) | 0.2637 (3) | 33.8 (8) |
| SML | 5.59 (3) | 7.5626 (3) | 0.5290 (2) | 2.8498 (10) | 3.47 (2) | 0.2646 (2) | 36.2 (9) |
| Variance | 8.52 (12) | 2.0959 (12) | 0.1204 (12) | 0.0045 (1) | NaN | 0.0604 (12) | 6.9 (1) |
| Vollath’s | 7.94 (11) | 3.4270 (9) | 0.2428 (10) | 0.4213 (7) | 6.95 (10) | 0.1215 (10) | 16.8 (2) |
| FFFT | 7.59 (9) | 3.2517 (11) | 0.2930 (9) | 0.1047 (3) | 5.54 (9) | 0.1476 (9) | 48.5 (10) |
| FDCT | 7.58 (8) | 3.2801 (10) | 0.2992 (8) | 0.1122 (4) | 5.46 (8) | 0.1507 (8) | 88.1 (12) |
| FDWT | 5.26 (1) | 10.3261 (1) | 0.5885 (1) | 3.0205 (12) | 3.18 (1) | 0.2953 (1) | 75.6 (11) |
| Ws/mm | Rsg | Cp | RRMSE | FWHM/mm | Sp | Time/ms | |
|---|---|---|---|---|---|---|---|
| SMD | 0.0362 (11) | 3.4708 (8) | 0.0127 (11) | 0.3956 (8) | 0.0285 (11) | 0.0064 (11) | 16.1 (4) |
| Roberts | 0.0280 (5) | 4.2535 (5) | 0.0244 (5) | 0.2611 (6) | 0.0159 (5) | 0.0122 (5) | 18.7 (6) |
| Tenengrad | 0.0290 (6) | 4.0672 (7) | 0.0227 (7) | 0.0651 (2) | 0.0165 (6) | 0.0113 (7) | 28.3 (9) |
| Brenner | 0.0291 (7) | 4.1023 (6) | 0.0246 (4) | 0.1853 (5) | 0.0167 (7) | 0.0123 (4) | 16.6 (5) |
| EOG | 0.0278 (4) | 4.3008 (4) | 0.0242 (6) | 0.4543 (9) | 0.0160 (4) | 0.0121 (6) | 15.9 (3) |
| EOL | 0.0238 (2) | 4.9806 (3) | 0.0391 (3) | 1.4395 (12) | 0.0153 (3) | 0.0196 (3) | 22.7 (8) |
| SML | 0.0239 (3) | 5.0140 (2) | 0.0400 (1) | 1.3602 (11) | 0.0150 (2) | 0.0200 (1) | 21.6 (7) |
| Variance | 0.0441 (12) | 2.1603 (12) | 0.0068 (12) | 0.0082 (1) | 0.0438 (12) | 0.0034 (12) | 5.7 (1) |
| Vollath’s | 0.0346 (10) | 3.3911 (9) | 0.0151 (10) | 0.3657 (7) | 0.0266 (10) | 0.0076 (10) | 8.8 (2) |
| FFFT | 0.0329 (9) | 3.0643 (11) | 0.0169 (9) | 0.1346 (3) | 0.0201 (9) | 0.0085 (8) | 60.7 (10) |
| FDCT | 0.0328 (8) | 3.0887 (10) | 0.0170 (8) | 0.1433 (4) | 0.0199 (8) | 0.0085 (8) | 110.9 (12) |
| FDWT | 0.0222 (1) | 5.5932 (1) | 0.0394 (2) | 1.3072 (10) | 0.0135 (1) | 0.0197 (2) | 88.9 (11) |
| Ws/mm | Rsg | Cp | RRMSE | FWHM/mm | Sp | Time/ms | |
|---|---|---|---|---|---|---|---|
| SMD | 0.0508 (10) | 3.2641 (10) | 0.0148 (11) | 0.2940 (8) | 0.0402 (11) | 0.0074 (11) | 16.0 (4) |
| Roberts | 0.0416 (5) | 4.2818 (4) | 0.0292 (6) | 0.1726 (6) | 0.0234 (5) | 0.0146 (6) | 18.0 (6) |
| Tenengrad | 0.0439 (7) | 4.1098 (7) | 0.0265 (7) | 0.0443 (2) | 0.0247 (7) | 0.0133 (7) | 27.5 (9) |
| Brenner | 0.0429 (6) | 4.1555 (5) | 0.0296 (4) | 0.1159 (5) | 0.0243 (6) | 0.0148 (4) | 15.1 (3) |
| EOG | 0.0403 (4) | 4.1287 (6) | 0.0296 (4) | 0.2998 (9) | 0.0233 (4) | 0.0148 (4) | 16.3 (5) |
| EOL | 0.0327 (2) | 4.7539 (3) | 0.0408 (3) | 0.9165 (12) | 0.0206 (3) | 0.0204 (3) | 21.5 (7) |
| SML | 0.0330 (3) | 4.7707 (2) | 0.0412 (2) | 0.8608 (11) | 0.0205 (2) | 0.0206 (2) | 22.0 (8) |
| Variance | 0.0688 (12) | 2.6622 (12) | 0.0077 (12) | 0.0041 (1) | 0.0929 (12) | 0.0039 (12) | 5.3 (1) |
| Vollath’s | 0.0517 (11) | 3.6621 (8) | 0.0192 (10) | 0.2674 (7) | 0.0382 (10) | 0.0096 (10) | 8.7 (2) |
| FFFT | 0.0494 (9) | 3.2058 (11) | 0.0207 (9) | 0.0872 (3) | 0.0302 (9) | 0.0104 (9) | 58.8 (10) |
| FDCT | 0.0487 (8) | 3.3196 (9) | 0.0216 (8) | 0.1020 (4) | 0.0290 (8) | 0.0108 (8) | 106.8 (12) |
| FDWT | 0.0293 (1) | 5.0197 (1) | 0.0487 (1) | 0.7802 (10) | 0.0173 (1) | 0.0244 (1) | 87.5 (11) |
| Ws/mm | Rsg | Cp | RRMSE | FWHM/mm | Sp | Time/ms | |
|---|---|---|---|---|---|---|---|
| SMD | 0.0509 (11) | 3.6154 (9) | 0.0099 (11) | 0.2475 (7) | 0.0437 (10) | 0.0049 (11) | 15.1 (3) |
| Roberts | 0.0446 (5) | 4.9841 (4) | 0.0197 (5) | 0.1786 (5) | 0.0276 (4) | 0.0098 (5) | 17.9 (6) |
| Tenengrad | 0.0457 (7) | 4.6457 (6) | 0.0193 (6) | 0.0450 (2) | 0.0283 (6) | 0.0097 (6) | 26.4 (9) |
| Brenner | 0.0456 (6) | 4.4930 (7) | 0.0200 (4) | 0.1927 (6) | 0.0284 (7) | 0.0100 (4) | 15.2 (4) |
| EOG | 0.0445 (4) | 5.0303 (3) | 0.0192 (7) | 0.3168 (9) | 0.0281 (5) | 0.0096 (7) | 16.3 (5) |
| EOL | 0.0378 (2) | 5.2859 (1) | 0.0305 (2) | 1.0231 (12) | 0.0270 (3) | 0.0152 (2) | 21.8 (8) |
| SML | 0.0382 (3) | 5.2614 (2) | 0.0316 (1) | 0.9484 (11) | 0.0262 (2) | 0.0158 (1) | 21.2 (7) |
| Variance | 0.0532 (12) | 2.2964 (12) | 0.0073 (12) | 0.0075 (1) | 0.0926 (12) | 0.0037 (12) | 6.4 (1) |
| Vollath’s | 0.0496 (10) | 3.8352 (8) | 0.0243 (3) | 0.3075 (8) | 0.0459 (11) | 0.0122 (3) | 8.8 (2) |
| FFFT | 0.0477 (9) | 3.4663 (11) | 0.0126 (10) | 0.1155 (3) | 0.0321 (9) | 0.0078 (10) | 57.6 (10) |
| FDCT | 0.0476 (8) | 3.4910 (10) | 0.0160 (9) | 0.1304 (4) | 0.0319 (8) | 0.0080 (9) | 110.6 (12) |
| FDWT | 0.0314 (1) | 4.6550 (5) | 0.0188 (8) | 0.8909 (10) | 0.0207 (1) | 0.0094 (8) | 88.3 (11) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piao, W.; Han, Y.; Hu, L.; Wang, C. Quantitative Evaluation of Focus Measure Operators in Optical Microscopy. Sensors 2025, 25, 3144. https://doi.org/10.3390/s25103144
Piao W, Han Y, Hu L, Wang C. Quantitative Evaluation of Focus Measure Operators in Optical Microscopy. Sensors. 2025; 25(10):3144. https://doi.org/10.3390/s25103144
Chicago/Turabian StylePiao, Weiying, Yongqi Han, Liye Hu, and Chunxue Wang. 2025. "Quantitative Evaluation of Focus Measure Operators in Optical Microscopy" Sensors 25, no. 10: 3144. https://doi.org/10.3390/s25103144
APA StylePiao, W., Han, Y., Hu, L., & Wang, C. (2025). Quantitative Evaluation of Focus Measure Operators in Optical Microscopy. Sensors, 25(10), 3144. https://doi.org/10.3390/s25103144