Robust Current Sensing in Rectangular Conductors: Elliptical Hall-Effect Sensor Array Optimized via Bio-Inspired GWO-BP Neural Network


Abstract
Highlights
- A novel bio-inspired strategy: the integration of an elliptical Hall sensor array with a hybrid GWO-enhanced neural network achieves a robust suppression of mechanical deformation-induced errors (65.07%, 45.74%, and 76.15% for X/Y/Z deviations).
- A space-efficient design: the elliptical sensor configuration reduces the installation footprint by 72.4% compared to conventional circular arrays while maintaining a high accuracy under extreme deformations (±8 mm displacement, ±15° tilt).
- Critical for compact applications: enables precise current sensing in space-constrained systems, such as electric vehicle powertrains and miniaturized inverters, addressing the challenges of high-density power electronics.
- Algorithm–hardware synergy: bridges bio-inspired optimization and adaptive sensing hardware, offering a systematic framework for mitigating mechanical interference in real-world industrial settings.
Abstract
1. Introduction
2. Design of Elliptical Hall-Effect Sensor Arrays
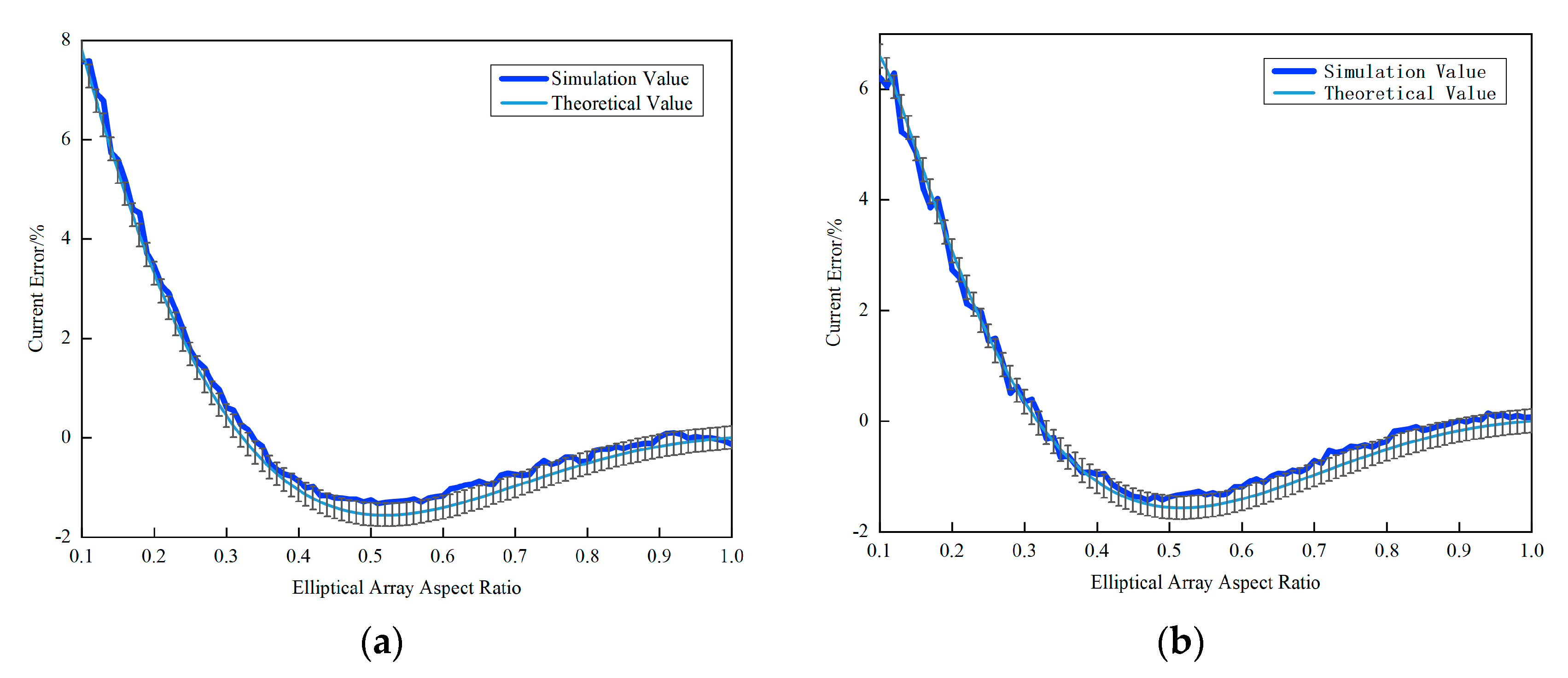
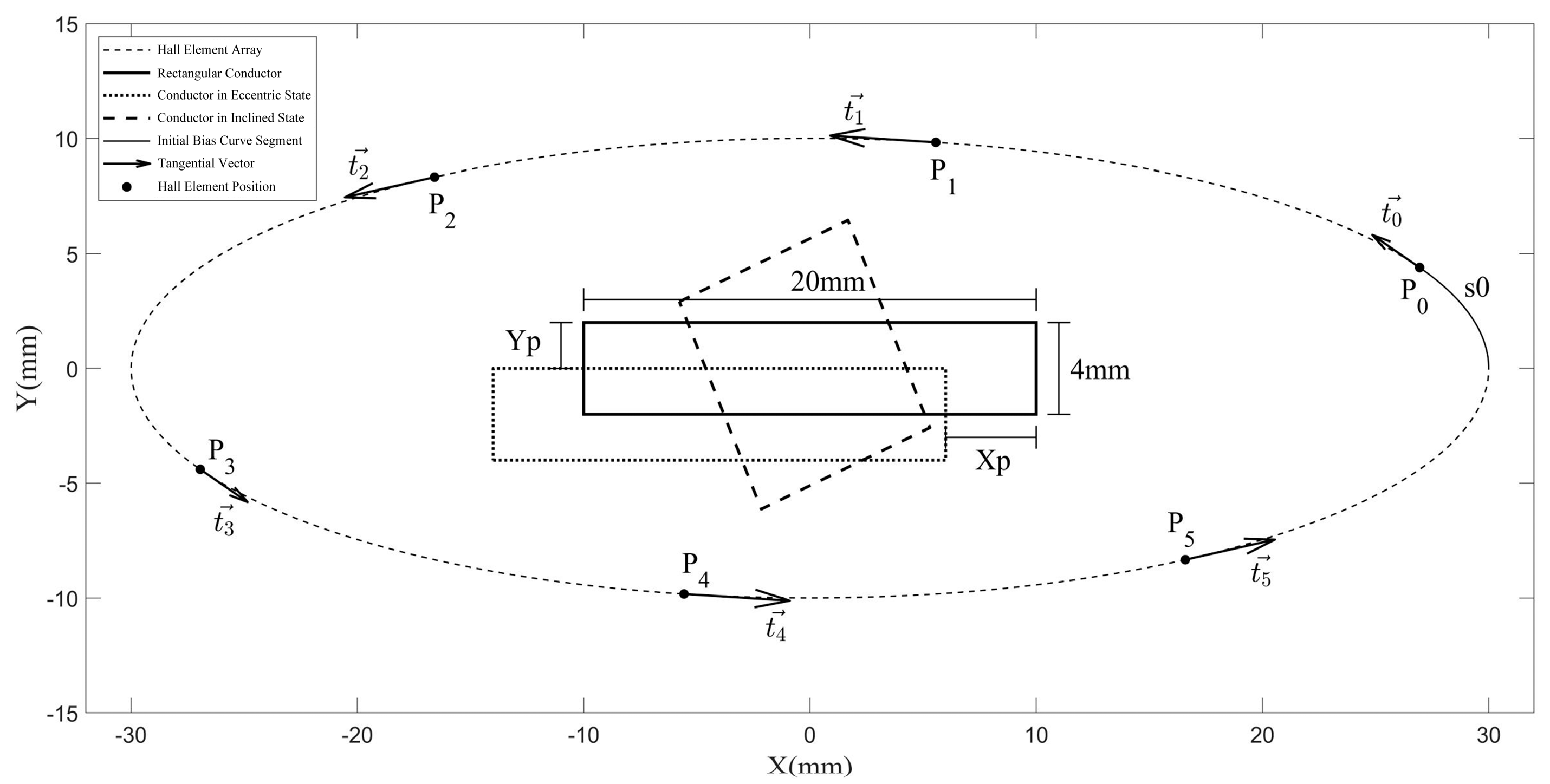
2.1. Elliptical Array Configuration
2.2. Theoretical Calculation
2.2.1. Operating Principle of Magnetic Sensor Array-Based Current Sensing
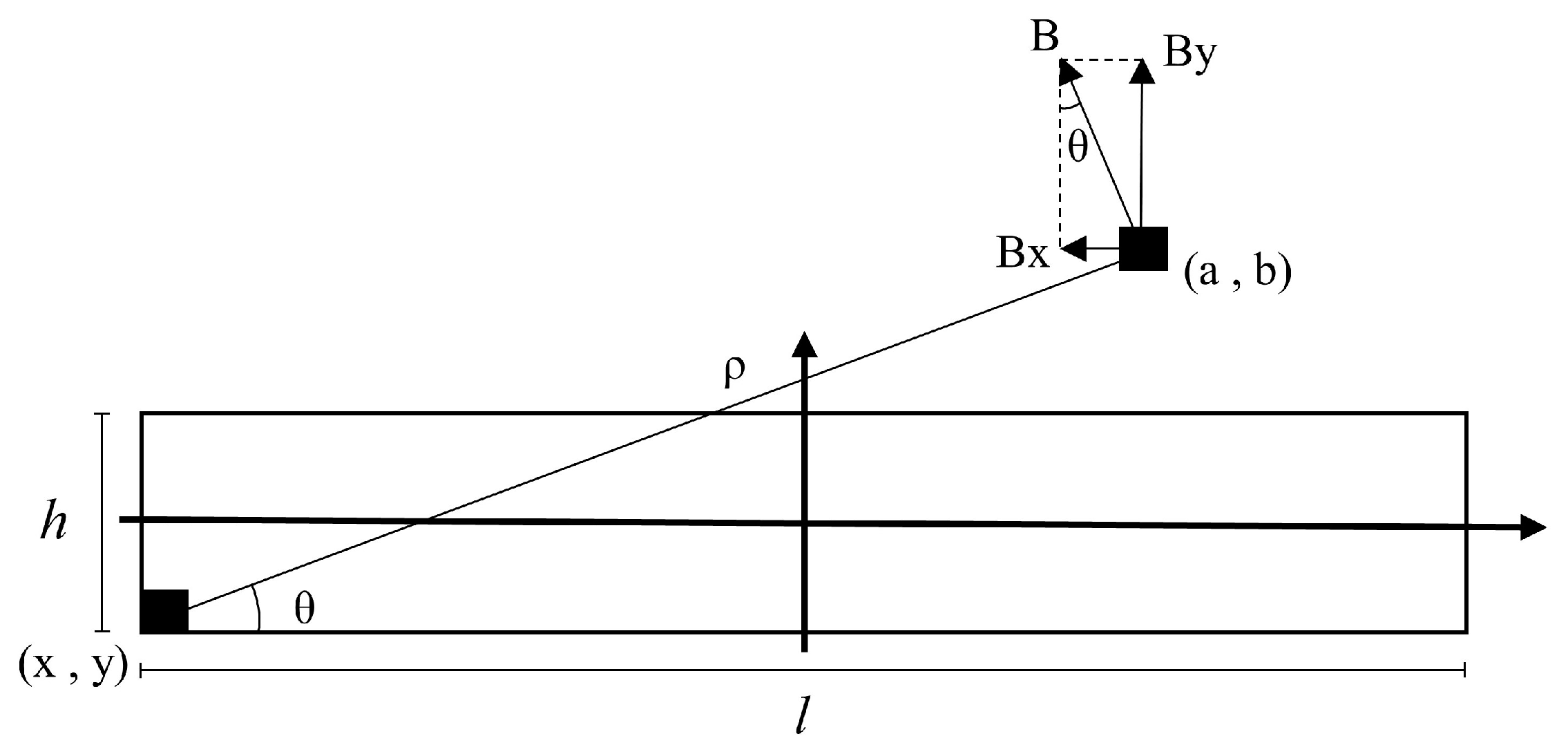
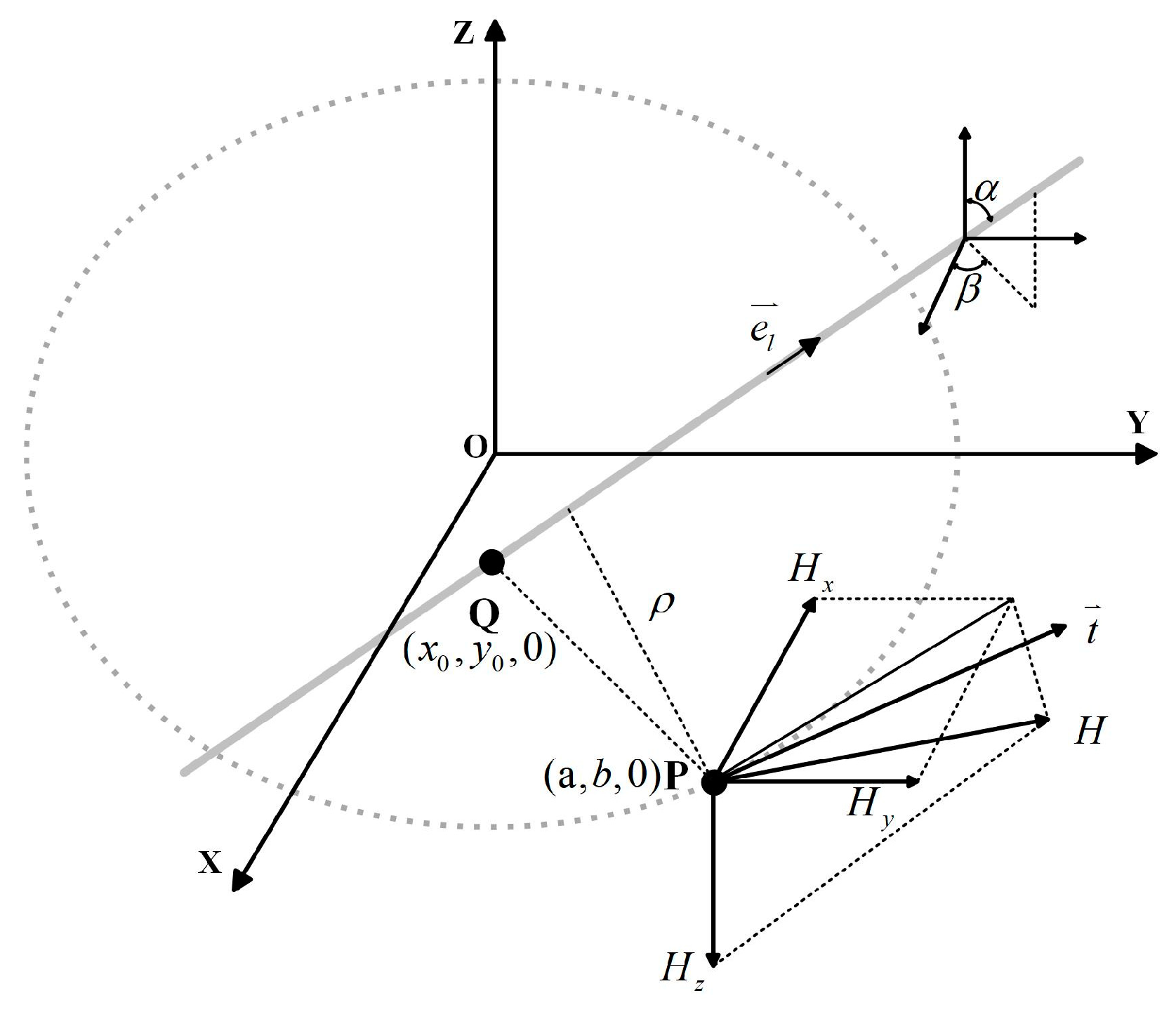
2.2.2. Current Measurement Principle for Rectangular Conductors
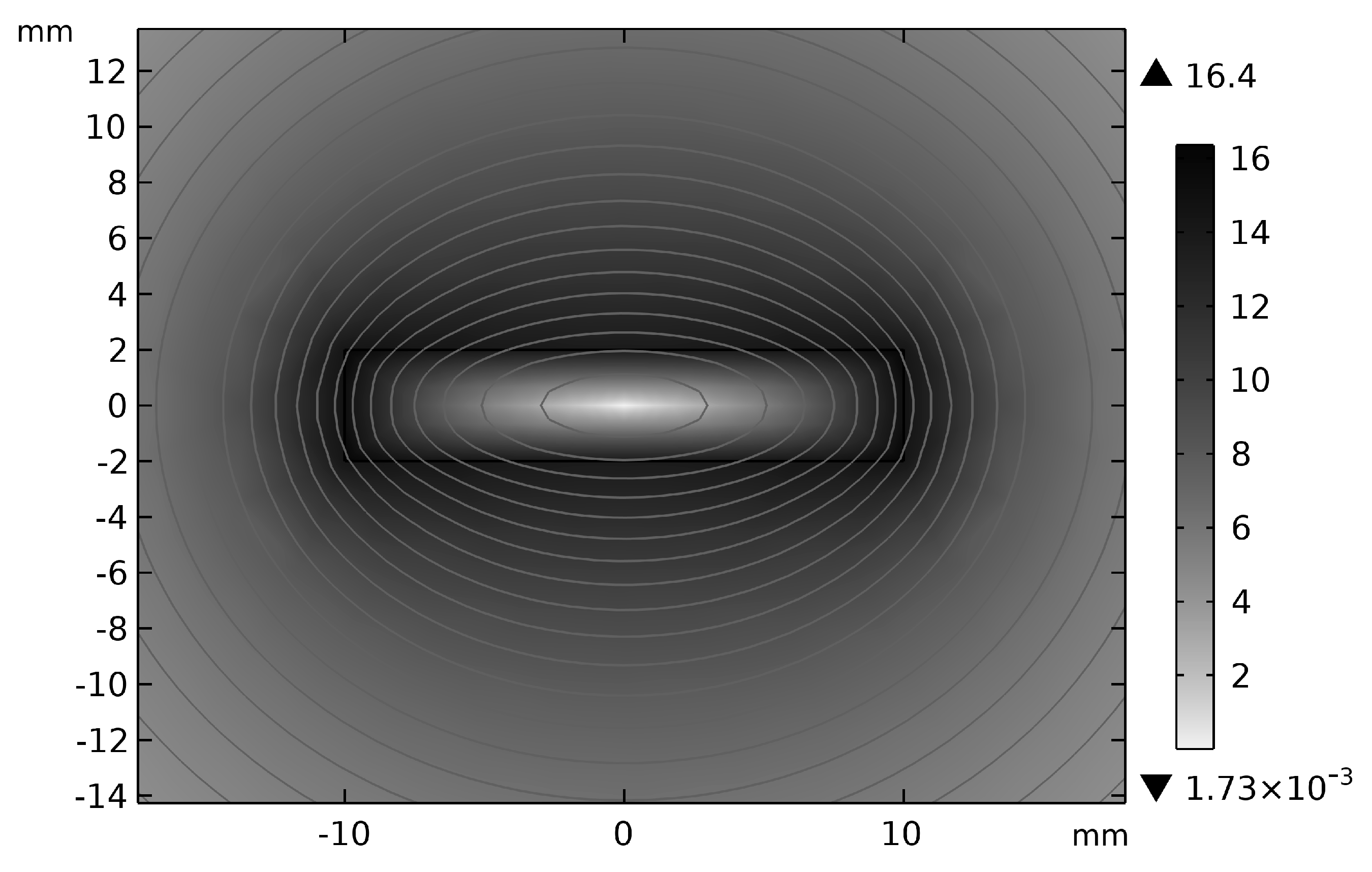
2.3. Simulation Setup
- Conductor Properties: rectangular copper busbar with an electrical conductivity of σ = 5.998 × 107 S/m and a density of ρ = 8960 kg/m3;
- Ambient Medium: non-conductive air (σ = 0 S/m);
- Probe Placement: Hall element positions equipped with magnetic flux density probes;
- Mesh Strategy: adaptive mesh refinement prioritizing boundary layers near the conductor edges.
3. GWO-BP-Based Error Optimization Algorithm
3.1. Parameter Initialization
3.2. Current Inversion Model
3.3. Estimation of Conductor Eccentricity and Tilt Parameters
3.3.1. Grey Wolf Optimizer (GWO)
3.3.2. GWO-BP Conductor State Parameter Estimation Model
4. Experimental Design and Validation
4.1. Experimental Platform
4.2. Performance Evaluation of Conductor State Estimation Models
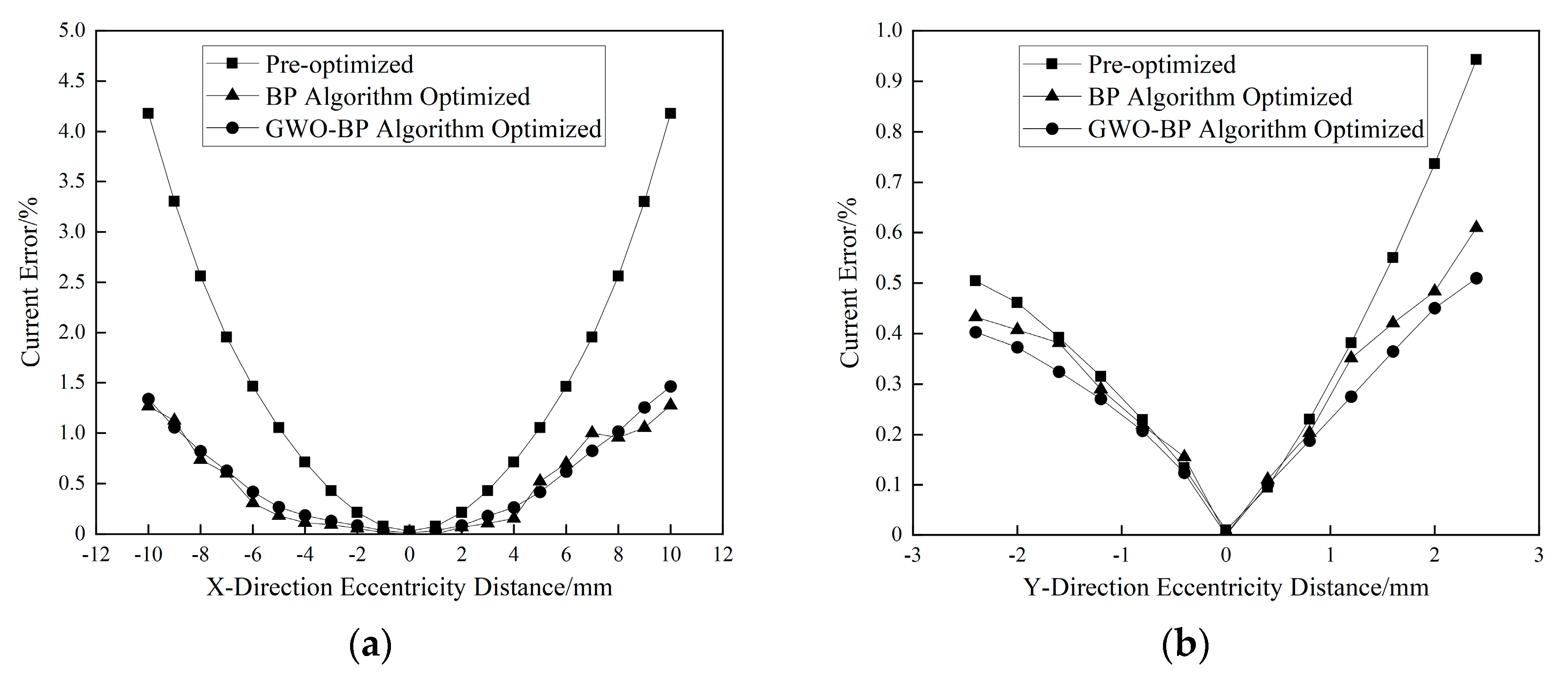
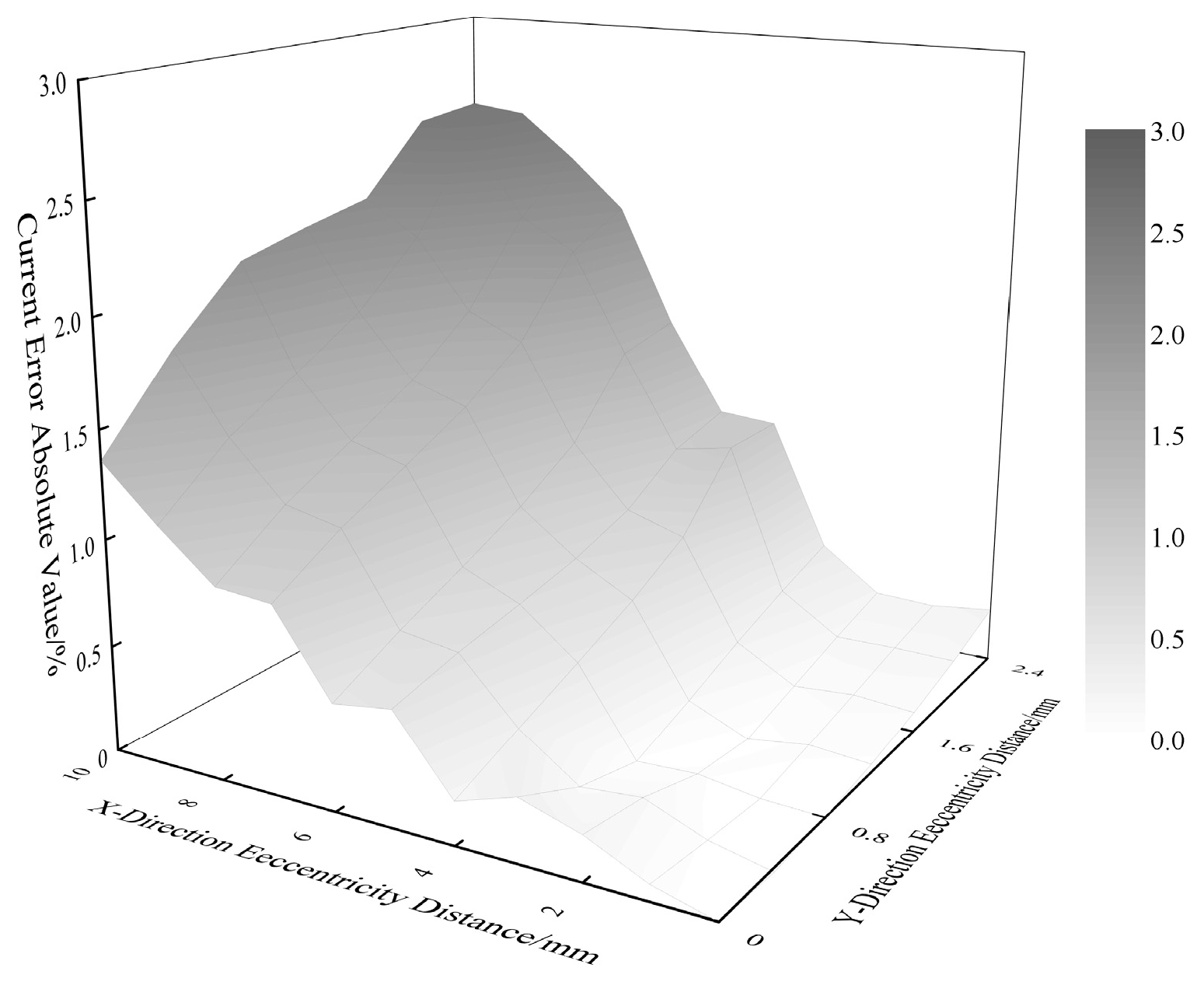
4.3. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GWO | Grey Wolf Optimizer |
| EV | electric vehicle |
| AR | aspect ratio |
| UCSL | uniform curve segment length |
| MAE | Mean Absolute Error |
| MSE | Mean Squared Error |
| MAPE | Mean Absolute Percentage Error |
References
- Ripka, P. Contactless measurement of electric current using magnetic sensors. TM-Tech. Mess. 2019, 86, 586–598. [Google Scholar] [CrossRef]
- Ma, X.; Guo, Y.; Chen, X.; Xiang, Y.; Chen, K.L. Impact of Coreless Current Transformer Position on Current Measurement. IEEE Trans. Instrum. Meas. 2019, 68, 3801–3809. [Google Scholar] [CrossRef]
- Itzke, A.; Weiss, R.; Dileo, T.; Weigel, R. The Influence of Interference Sources on a Magnetic Field-Based Current Sensor for Multiconductor Measurement. IEEE Sens. J. 2018, 18, 6782–6787. [Google Scholar] [CrossRef]
- Weiss, R.; Makuch, R.; Itzke, A.; Weigel, R. Crosstalk in Circular Arrays of Magnetic Sensors for Current Measurement. IEEE Trans. Ind. Electron. 2017, 64, 4903–4909. [Google Scholar] [CrossRef]
- Khawaja, A.H.; Huang, Q.; Chen, Y. A Novel Method for Wide Range Electric Current Measurement in Gas-Insulated Switchgears With Shielded Magnetic Measurements. IEEE Trans. Instrum. Meas. 2019, 68, 4712–4722. [Google Scholar] [CrossRef]
- Guo, C.; Zhang, H.; Guo, H.; Chen, L.; Chen, W.; Yu, N. Crosstalk analysis and Current Measurement Correction in Circular 3D Magnetic Sensors Arrays. IEEE Sens. J. 2020, 21, 3121–3133. [Google Scholar] [CrossRef]
- Yu, H.; Qian, Z.; Liu, H.; Qu, J. Circular Array of Magnetic Sensors for Current Measurement: Analysis for Error Caused by Position of Conductor. Sensors 2018, 18, 578. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Li, F.; Guo, H.; Yang, Z.; Yu, N. Current Measurement With 3-D Coreless TMR Sensor Array for Inclined Conductor. IEEE Sens. J. 2019, 19, 6684–6690. [Google Scholar] [CrossRef]
- Zapf, F.; Weiss, R.; Weigel, R. Crosstalk in Elliptical Sensor Arrays for Current Measurement. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Guo, Q. Research on Key Technology of New High Current Sensor Based on Magnetic Sensor Array. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2017. [Google Scholar]
- Xie, Z.Y.; Yang, T.Y.; Wang, L.C. Optimized design of non-contact current sensor based on rectangular array. Instrum. Technol. Sens. 2022, 12, 7–12. [Google Scholar]
- Xu, X.P.; Liu, T.Z.; Zhu, M.; Wang, J.G. New Small-Volume High-Precision TMR Busbar DC Current Sensor. IEEE Trans. Magn. 2020, 56, 1–5. [Google Scholar] [CrossRef]
- Xu, X.P.; Liu, T.Z.; Zhu, M.; Wang, J.G. Nonintrusive Installation of the TMR Busbar DC Current Sensor. J. Sens. 2021, 2021, 8827131. [Google Scholar] [CrossRef]
- Blagojević, M.; Jovanović, U.; Jovanović, I.; Mančić, D.; Popović, R.S. Realization and optimization of bus bar current transducers based on Hall effect sensors. Meas. Sci. Technol. 2016, 27, 065102. [Google Scholar] [CrossRef]
- Li, W.; Zhang, G.; Zhong, H.; Geng, Y. A Wideband Current Transducer Based on an Array of Magnetic Field Sensors for Rectangular Busbar Current Measurement. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Weiss, R.; Zapf, F.; Skelly, A.; Weige, R. Busbar Current Measurement With Elliptical Sensor Arrays Without Conductor Specific Calibration. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Hu, J.; Ma, H.Y.; Li, P.; Tian, B.; Liu, Z.; Lv, Q.C. Research progress of current measurement method based on magnetic field sensor array. High Volt. Technol. 2023, 49, 1779–1794. [Google Scholar]
- Li, S.C.; Wu, J.F. Indoor Positioning Based on Intelligent Optimization Algorithm and Optimized BP Neural Network. Sci. Technol. Eng. 2024, 24, 8568–8576. [Google Scholar]
- Li, H.P.; Du, X.Y.; Zhu, C.B.; Jin, Z.H.; Chen, X.Y.; Yu, B.T.; Li, J.R.; An, Y.T. Research on Flexible Job Shop Rescheduling Problem Based on Improved Grey Wolf Algorithm. J. Taiyuan Univ. Technol. 2024, 55, 603–611. [Google Scholar]
- He, Z.; Zhang, D.; Yu, X.F.; Yu, L.N.; Xu, Z.L. Design of intelligent TAS sensor test system based on LabVIEW. Foreign Electron. Meas. Technol. 2023, 42, 26–32. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (26.94, 4.40, 0) | 145.79° | |
| (5.57, 9.83, 0) | 176.38° | |
| (−16.59, 8.33, 0) | 192.58° | |
| (−26.94, −4.40, 0) | 325.79° | |
| (−5.56, −9.83, 0) | 356.38° | |
| (16.59, −8.33, 0) | 12.58° |
| Estimated Parameters | Estimation Algorithms | Evaluation Indicators | ||
|---|---|---|---|---|
| MAE | MSE | MAPE | ||
| BP | 0.2272 | 0.0771 | 0.8419% | |
| GWO-BP | 0.0498 | 0.0041 | 1.0411% | |
| BP | 0.0619 | 0.0043 | 5.2646% | |
| GWO-BP | 0.0146 | 0.0004 | 1.0621% | |
| BP | 0.0124 | 0.0003 | 10.3490% | |
| GWO-BP | 0.0037 | 0.0001 | 2.8585% | |
| BP | 0.0071 | 0.0002 | 3.9567% | |
| GWO-BP | 0.0028 | 0.0001 | 0.8626% | |
| BP | 0.0143 | 0.0005 | 2.2479% | |
| GWO-BP | 0.0029 | 0.0001 | 0.4173% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Lu, J.; Shen, Y. Robust Current Sensing in Rectangular Conductors: Elliptical Hall-Effect Sensor Array Optimized via Bio-Inspired GWO-BP Neural Network. Sensors 2025, 25, 3116. https://doi.org/10.3390/s25103116
Tang Y, Lu J, Shen Y. Robust Current Sensing in Rectangular Conductors: Elliptical Hall-Effect Sensor Array Optimized via Bio-Inspired GWO-BP Neural Network. Sensors. 2025; 25(10):3116. https://doi.org/10.3390/s25103116
Chicago/Turabian StyleTang, Yue, Jiajia Lu, and Yue Shen. 2025. "Robust Current Sensing in Rectangular Conductors: Elliptical Hall-Effect Sensor Array Optimized via Bio-Inspired GWO-BP Neural Network" Sensors 25, no. 10: 3116. https://doi.org/10.3390/s25103116
APA StyleTang, Y., Lu, J., & Shen, Y. (2025). Robust Current Sensing in Rectangular Conductors: Elliptical Hall-Effect Sensor Array Optimized via Bio-Inspired GWO-BP Neural Network. Sensors, 25(10), 3116. https://doi.org/10.3390/s25103116