1. Introduction
Ultrafast imaging techniques pave the way to the studies of dynamic phenomena beyond the temporal scale of nanoseconds [
1,
2,
3,
4,
5,
6], which are of great interest in diverse scientific research and industrial applications. When femtosecond time resolution is pursued, the pump-probe method is the golden standard [
7,
8]. However, it is not applicable for non-repetitive dynamic events, such as explosions [
9], femtosecond laser ablation [
10,
11], and physical processes in semiconductors [
12]. This promotes the development of single-shot ultrafast imaging techniques.
Several single-shot femtosecond photography approaches emerge to achieve multiple frame acquisition for a once-occurred dynamic event, including sequentially timed all-optical mapping photography (STAMP) [
13], STAMP’s variant utilizing spectral filtering (STAMP-SF) [
14,
15], frequency recognition algorithm for multiple exposures (FRAME) [
16,
17], compressed ultrafast spectral–temporal photography (CUST) [
18], and swept coded aperture real-time femto-photography (SCARF) [
19]. The principle includes encoding of ultrafast illumination pulses spectrally or spatially and separation of time-resolved frames optically or computationally.
For STAMP and FRAME, a train of daughter pulses is needed to probe the target; individual daughter pulses carry different transient information. It is apparent that the exposure time, frame rate, and frame number are determined by the daughter pulses’ duration, interval, and numbers, respectively. The temporal properties, including exposure time and frame rate of STAMP, have been discussed and optimized in previous works [
20]. For the methods using continuous chirped pulse illumination (STAMP-SF, CUST, and SCARF), the features of output frames are determined by not only the chirped pulse but also the spectrally resolving device. In [
21], a full Fourier transform method was proposed to enhance the temporal resolution by measuring both the amplitude and phase of the chirped illumination probe.
However, the current works with continuous chirped pulse illumination lack a systematic analysis and an instructive guideline for the quantitative determination of temporal characteristics in a particular setup. It is desirable and essential to construct a feasible evaluation model to quantitatively analyze and optimize the temporal resolving capability, providing a more convincing interpretation of the captured results.
In this work, we investigate the temporal characteristics referring to the previous configurations using chirped pulse illumination, especially the time resolution, revealing the key factors in single-shot ultrafast photography using continuous chirped pulse illumination. Additionally, the procedure of the theoretical evaluation guideline and the potential experimental evaluation setup using an optical Kerr gate are discussed.
2. Methods and Theory
The process of ultrafast imaging based on chirped pulse illumination can be abstracted into three stages, as shown in
Figure 1. During the pulse broadening stage, incident pulses are stretched into chirped pulses with a longer duration, which determines the observing time window
. For STAMP, the chirped pulse is chopped into a series of daughter pulses before illumination. For STAMP-SF, CUST, and SCARF, the chirped pulse is directly incident on targets. For the second stage, the object’s time-varying information is mapped to individual wavelengths. In the third stage, time-resolved frames are extracted using spectral imaging systems.
In the continuous chirped pulse case, the frame rate and frame number depend on the spectral interval between adjacent frames and the total number of spectral images. The time resolution is determined by the spectral resolution , chirped pulse’s bandwidth , and dispersive properties. To evaluate the temporal properties quantitatively, the spectrum–time mapping model is constructed based on the physical data acquisition model, and the evaluation criteria are set for synthetic signals following sine functions.
2.1. Spectrum–Time Mapping Model
To evaluate the temporal characteristics quantitatively, the mathematical model of the spectrum–time mapping relationship of the chirped illumination is constructed. The electric field of a bandwidth-limited Gaussian pulse can be expressed as [
22]
where
is the standard deviation and
is the center frequency. The full width at half maximum (FWHM) of the pulse intensity profile is
. The corresponding expression of Equation (
1) in the Fourier domain is
With the relationship
, Equation (
2) can be written as
Equation (
3) reveals that the pulse power spectrum curve follows the Gaussian distribution with a FWHM of
.
With the propagation in a dispersion medium at any point
z, the field in the Fourier domain can be expressed as
where
is the wavenumber at
. Expanding
in a Taylor series around the carrier frequency
,
Equation (
4) can be rewritten as
where the cubic and higher-order terms in the expansion (Equation (
5)) are excluded because they are negligible if
[
22]. With the inverse Fourier transform of Equation (
6), the expression of the chirped pulse in the temporal domain is
which can be derived as
where
is the dispersion length. The chirped pulse is broadened with a standard deviation
and a FWHM
.
is the group velocity of the pulse envelope.
The chirped pulse in Equation (
10) can be simplified as
where
. The phase varies quadratically across the pulse at any
z,
The time derivative of
is
where
is the frequency difference along the chirped pulse.
changes linearly with
T, which is the chirped pulse spectrum–time mapping model.
For example,
Figure 2 shows the spectrum–time mapping curves with
nm,
nm, and SF10 glass lengths
z = [100, 150, 200] mm in red, yellow, and green, respectively. The influence of the high-order dispersion is also explored. The high-order terms in Equation (
5) are labeled in the legend, with (2) and (3) representing the second and third orders (solid and dashed lines). The high-order dispersion slightly affects the spectrum–time mapping model, as shown in the zoomed-in figure labeled with the blue box. If the high-order dispersion is not negligible, we need to calibrate the time labels of the spectrally resolved frames with the mapping model.
2.2. Evaluation Criteria
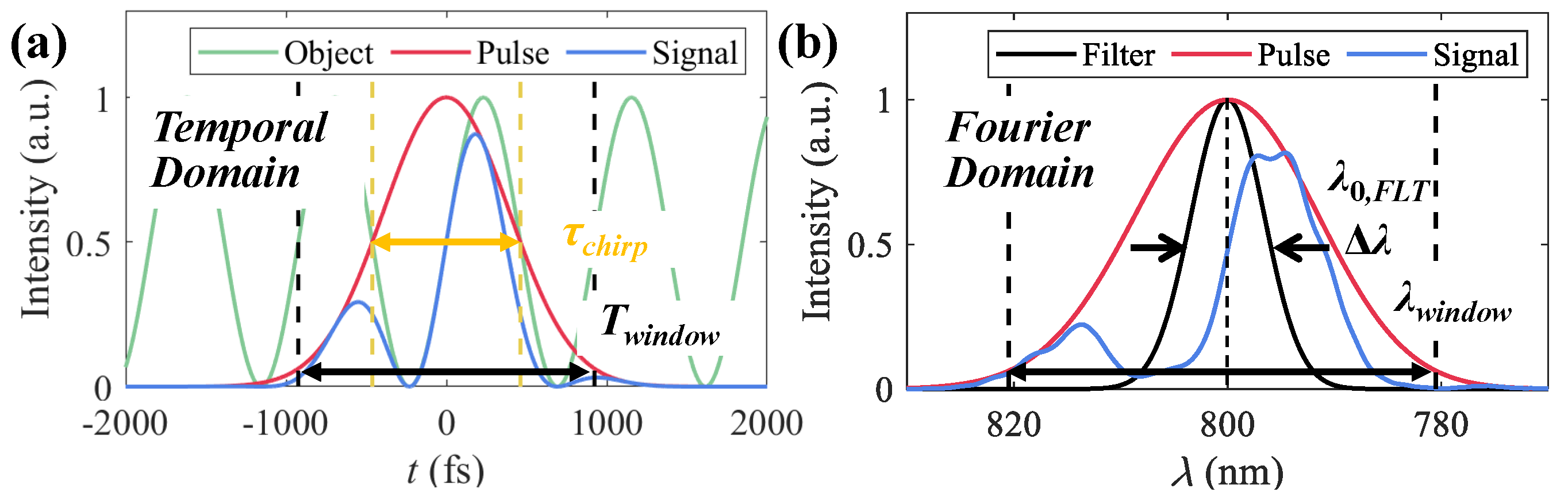
For simplification, one-dimensional detection using chirped pulses is demonstrated. The object’s transmission function
is simulated as a sine function with a period of
and is assumed to be homogeneous over the spectrum of the chirped illumination, as shown in
Figure 3a (green),
The signal (
Figure 3a, blue) after object modulation is
The corresponding Fourier domain distributions of
and
are shown in
Figure 3b as the red and blue lines. In the comparison of the chirped pulses, they precede and postdate the object’s modulation; diverse wavelengths carry the information from different moments of the object. Filters are used for time-resolved signal extraction, whose spectrum curves are assumed to follow Gaussian functions
with a center wavelength of
and a FWHM of
, as shown in
Figure 3b (black). By scanning
in the observing window
in the Fourier domain with a step of
, multiple frames can be extracted.
The filtered object signal
and reference signal
in the Fourier domain can be expressed as
and
in the temporal domain can be derived with the inverse Fourier transform.
is calibrated by dividing
to eliminate the influence of illumination’s non-uniform intensity distribution.
is integrated temporally by a detector to output a measurement
at
. Likewise,
is calibrated by dividing
, which is the integration of
.
By scanning the filter over the spectrum, at different is obtained. According to the relationship between spectrum and time, the temporal domain is derived. The length of is the frame number , and the time interval between adjacent measurements is the frame interval whose multiplicative inverse is the frame rate.
The time resolution depends on the similarity between
and
, which is evaluated with two parameters in this work, the relative modulation
M and similarity index
R,
The modulation of is set to , with and . is the modulation of . M indicates the capability of resolving two adjacent peaks, while R represents the degree of measurement distortion. is the mean squared error between and . is the when the measurement is completely flat ( = 0.5) without time-resolved information. If , is heavily distorted with a non-negligible phase change from . Therefore, to ensure a high-fidelity time-resolved measurement, M and R should simultaneously satisfy some criteria to determine the minimum resolvable period of . indicates the time resolution. The criteria for determining are and in this work.
The valid time observing window is defined as
, as shown in
Figure 3. The maximum period of
that is available for evaluation is set to
. Poisson noise is considered, and the number of photons of the illumination pulse is denoted as
in the following simulations.
3. Temporal Characteristics
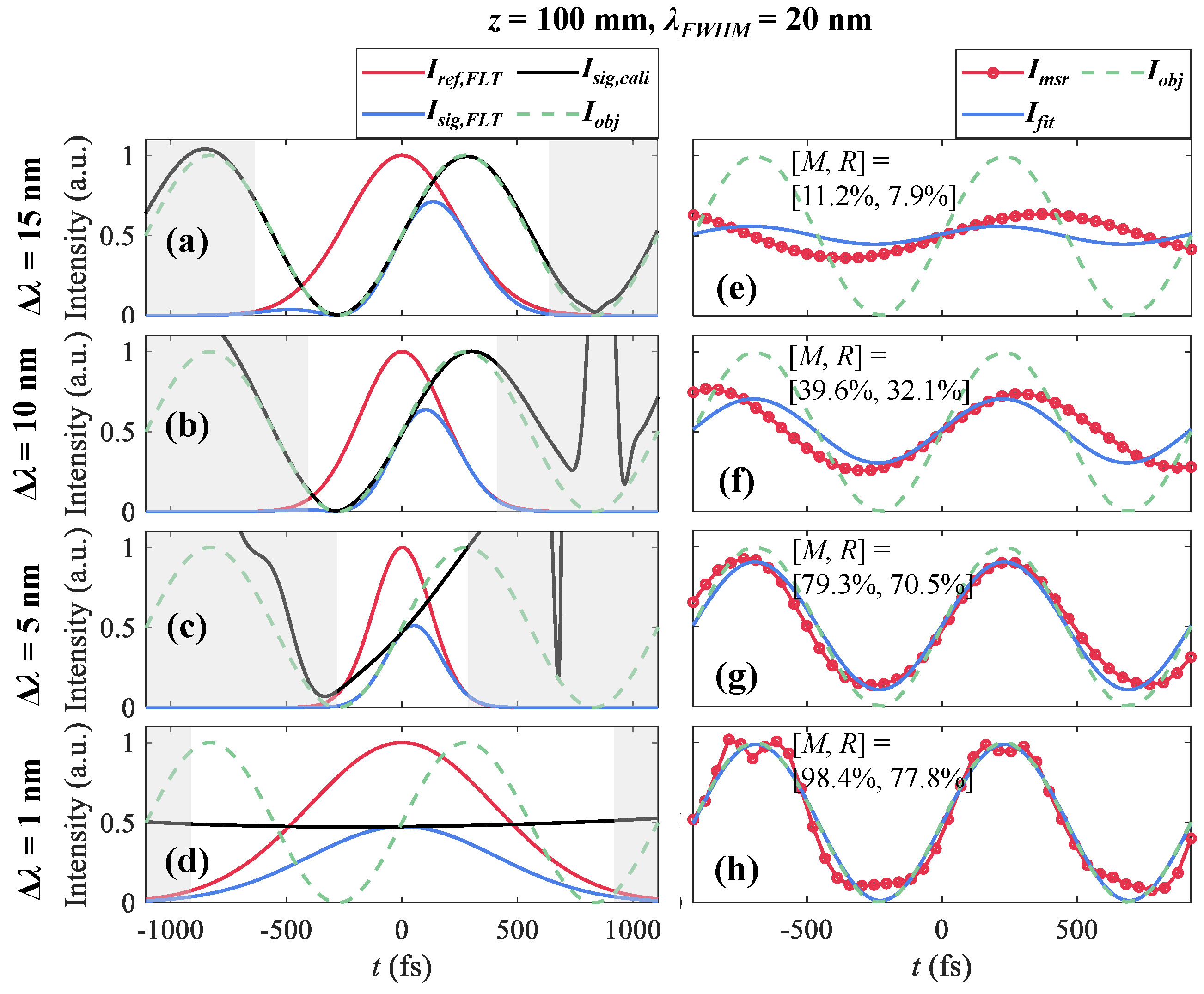
The influence of the filtering bandwidth
on the underlying changes of the chirped pulse and the measurements is demonstrated in
Figure 4. The ground truth of
(
= 400 fs) is represented as the green dotted line. SF10 glass rods with lengths
z are adopted for generating chirped pulses for illumination in the following simulations. A bandwidth-limited pulse with
= 20 nm (
= 47 fs) and
at
= 800 nm is broadened into a chirped pulse (
= 923 fs) with
z = 100 mm.
Figure 4a–d show the filtered reference signal
(red), filtered object signal
(blue), and calibrated signal
(black) using filters with
and
= 15 nm, 10 nm, 5 nm, and 1 nm, respectively.
The measured results
are produced by integrating
and
temporally at a series of
.
is shown in red with circular markers and is fitted with a sine function
with a period of
in
Figure 4e–h. With a large
= 15 nm,
contains plenty of the object’s information and
(black) highly conforms to
in
Figure 4a.
, shown in
Figure 4e, is a complanate curve due to each spectrally resolved measurement covering similar object information, leading to unresolvable peaks of
.
While dispersion plays a domain role on filtered pulse widths, narrower
and
are produced with decreased
, as shown in
Figure 4b,c. Meanwhile, less object information is involved in
.
is similar to the ground truth in a limited range and seems to be stretched, as the slope is flatter than
around
t = 0 fs.
varies as different filters cover different object information, as shown in
Figure 4f,g. The evaluative parameters
for
= 10 nm and
for
= 5 nm.
As
decreases, the Fourier transform limits filtered pulse widths, which can be much wider than the chirped pulse. However,
does not contain more object information covered by the filtered pulse. The valid object’s information contained is still in a limited range and is stretched over the filtered pulse, as shown in
Figure 4d. The performance of
is improved with
.
Figure 5 shows the influence of
and
on the measurement performance of
using chirped pulse illumination (
= 20 nm and
).
Figure 5a–c show
M diagrams and
Figure 5d–f show
R diagrams for
z = 100 mm, 150 mm, and 200 mm with
= 923, 1384, and 1845 fs. The lower bounds of
that can be resolved increase with increasing
z or
. For a fixed
, a smaller
leads to a lower signal-to-noise ratio (SNR) due to Poisson noise, while a larger
decreases the ability to extract spectrally resolved information from
. Therefore, there is an optimum
leading to maximum
M and
R.
The influence of
on measurement performance is shown in
Figure 6 for the case
20 nm and
z = 200 mm.
M and
R curves with
are in orange, purple, brown, and blue, respectively. The similarity index
R is more sensitive to
.
M and
R have maximum values around 0.5 nm and 2.2 nm, respectively. Therefore,
in the range of [0.5, 2.2] nm can be set to make a compromise between
M and
R. The lower the SNR, the larger the
should be selected. In the following simulations, cases with
are considered.
Figure 7 shows the measurements
of
(black) with different
around the lower bounds
= 490 fs, 580 fs, and 670 fs and the upper bounds
= 920 fs, 1300 fs, and 1800 fs for
z = 100 mm, 150 mm, and 200 mm.
with
= 0.5 nm, 5 nm, 8 nm, and 10 nm is in orange, purple, brown, and blue, respectively. On the lower bounds,
with
= 0.5 nm satisfies the criteria for time resolution (
M > 0.1 and
R > 0.1), whereas the other cases are failed. On the upper bounds, two peaks can be resolved for all cases, and
have lower
M and
R with a larger
. Consequently, the time resolution and time window are mutually restricted, and larger
leads to degraded measurements.
Figure 8 shows the influence of
and
on the measurement performance of
using
= 0.5 nm.
Figure 8a–c show
M diagrams, and
Figure 8d–f show
R diagrams for
z = 100 mm, 150 mm, and 200 mm, respectively. The upper bound
increases gradually with larger
because of a longer pulse duration. The lower bound
is insensitive to
when
and
z is fixed, but sensitive to
z.
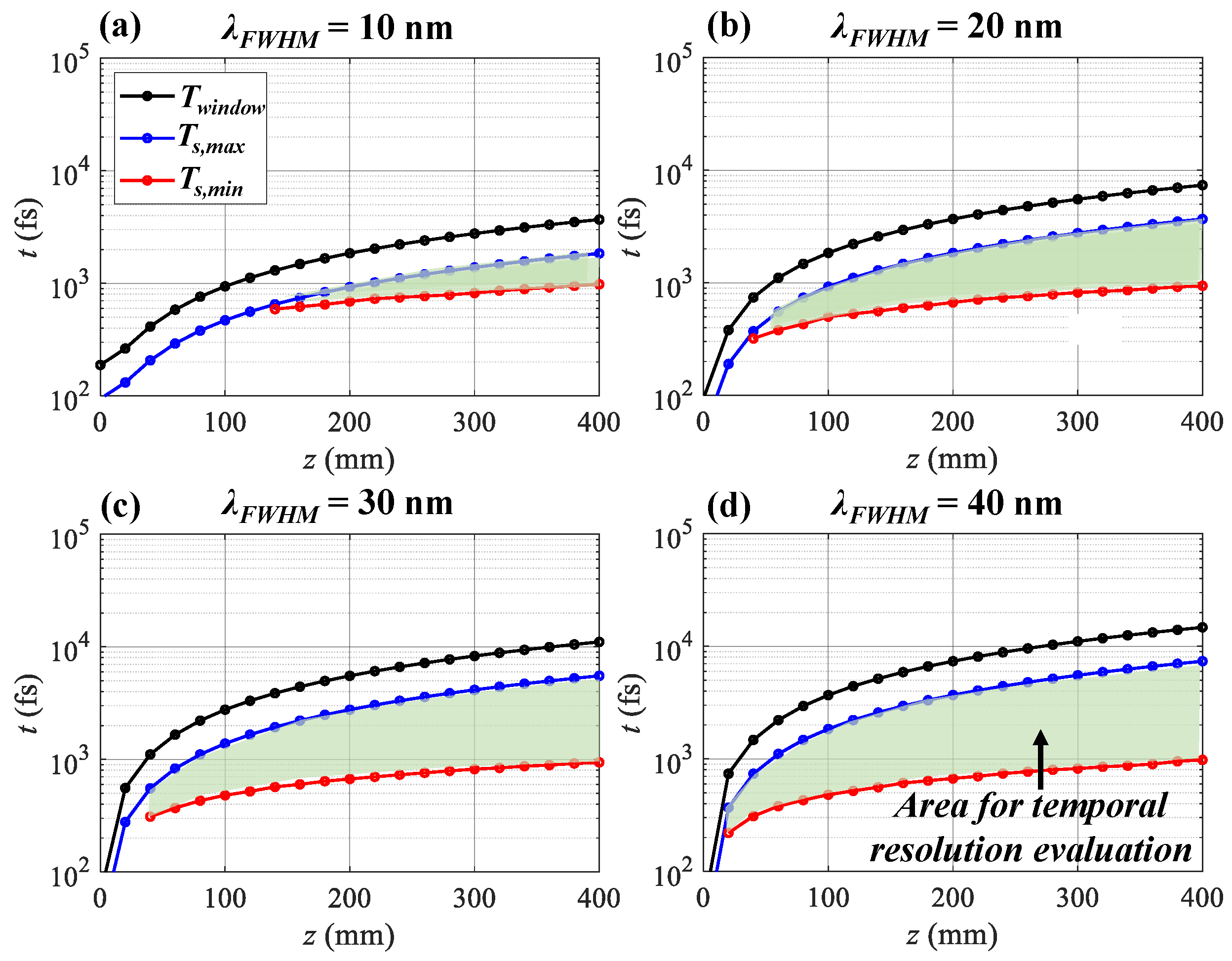
To explore the influence of
further, the lower and upper bounds (
,
) depending on
z with
= 10 nm, 20 nm, 30 nm, and 40 nm are shown in
Figure 9.
is determined with the criteria
M > 0.1 and
R > 0.1.
= 0.5 nm for all cases. The green area limited by the
and
curves is the evaluation area for time resolution. When
= 10 nm, the pulse is stretched from 94 fs to 742 fs to provide a minimum
= 590 fs at
z = 140 mm (
Figure 9a). With larger
,
can be pushed lower
= 320 fs @
z = 40 mm, 310 fs @
z = 40 mm, and 220 fs @
z = 20 mm for
= 20 nm, 30 nm, and 40 nm. With the increase in
z, the pulse is stretched broader, leading to a wider
. Meanwhile, the time resolution degrades. At
z = 400 mm,
= 980 fs for
= 10 nm, 20 nm, 30 nm, and 40 nm.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}