
Real-Time Direction Judgment System for Dual-Frequency Laser Interferometer

 and
and
Abstract
1. Introduction
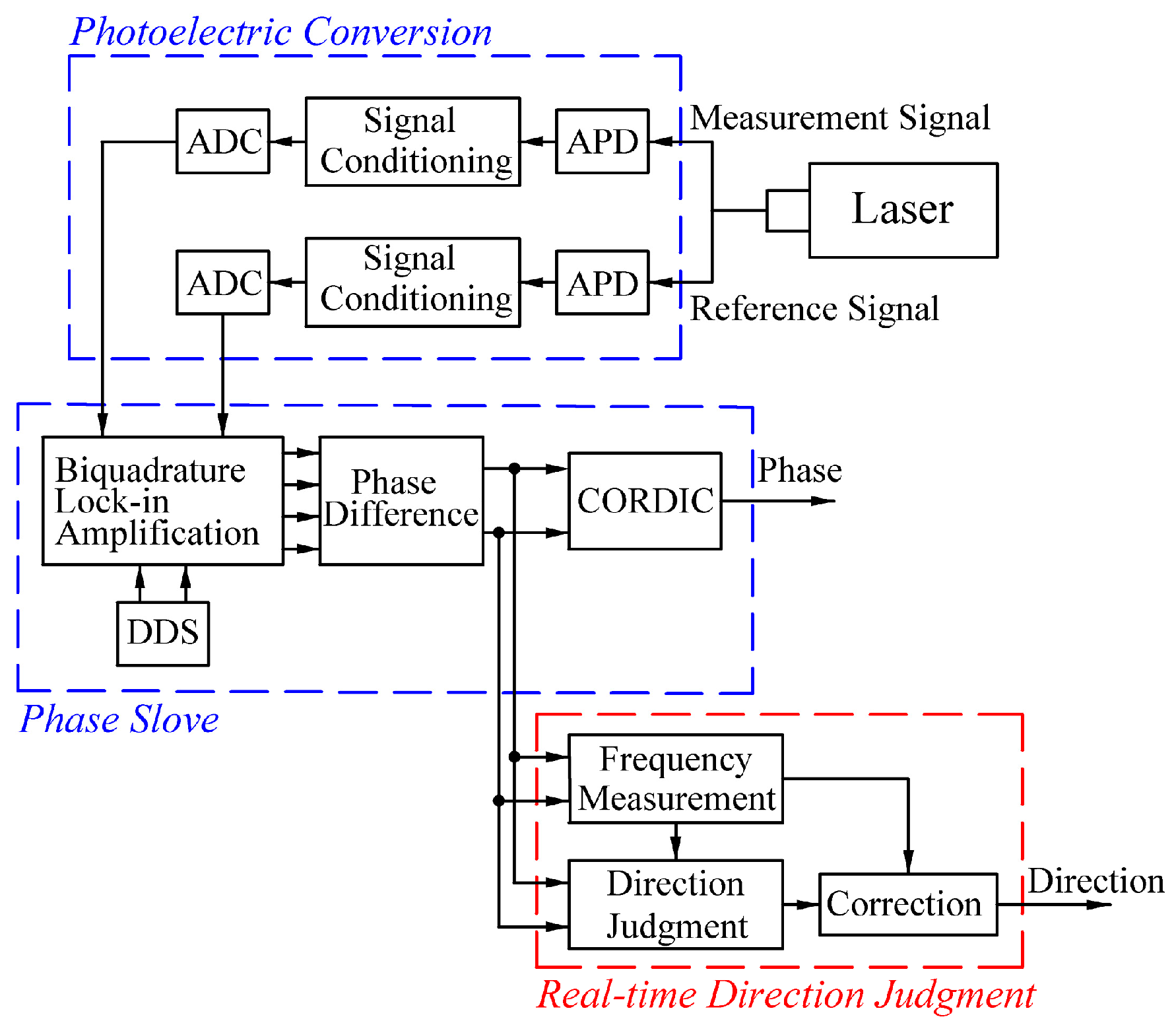
2. Design of a Real-Time Direction Judgment System
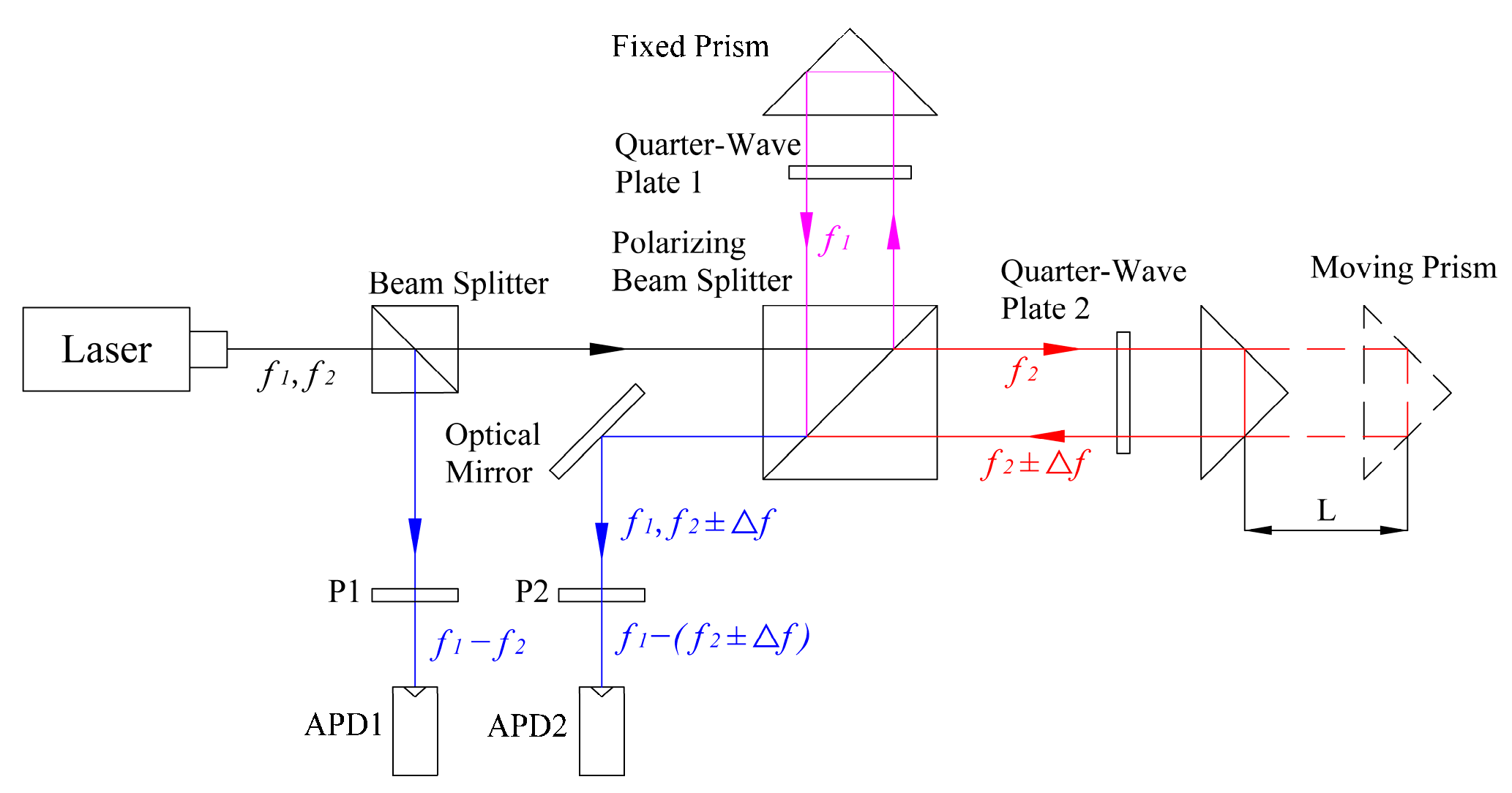
2.1. Dual-Frequency Laser Interferometer Measurement Principle and Phase Solution Algorithm
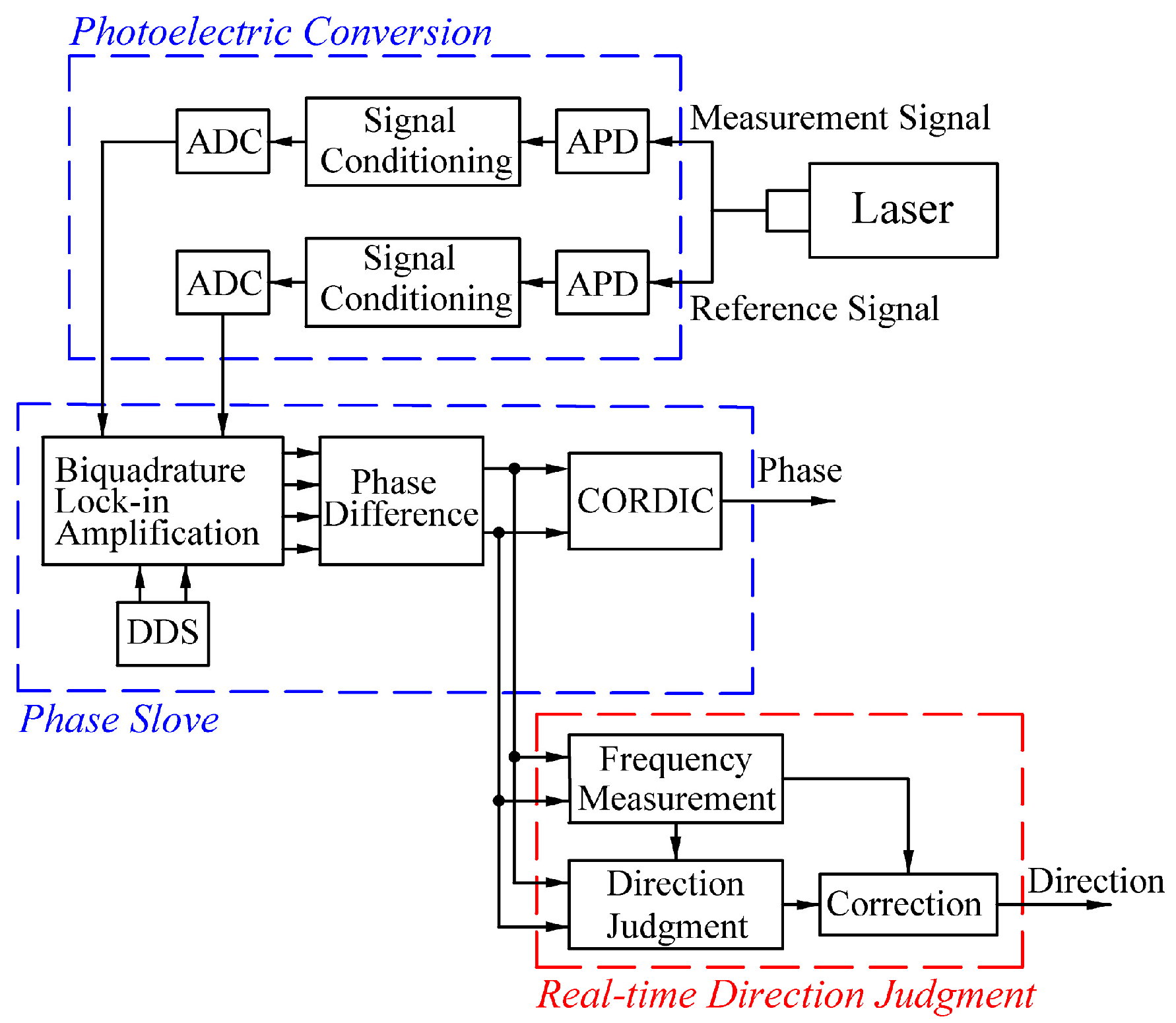
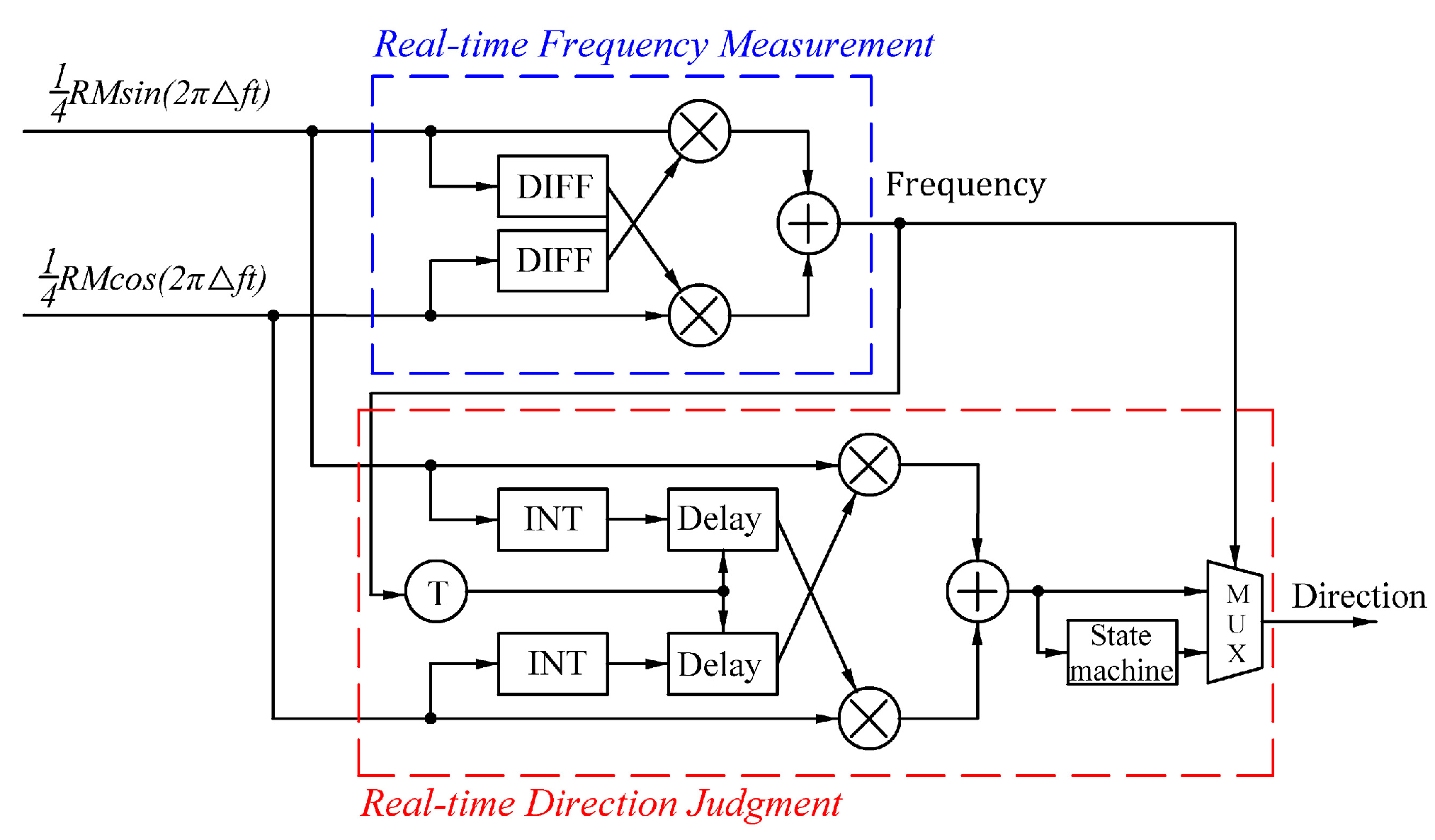
2.2. Design of a Real-Time Direction Judgment System
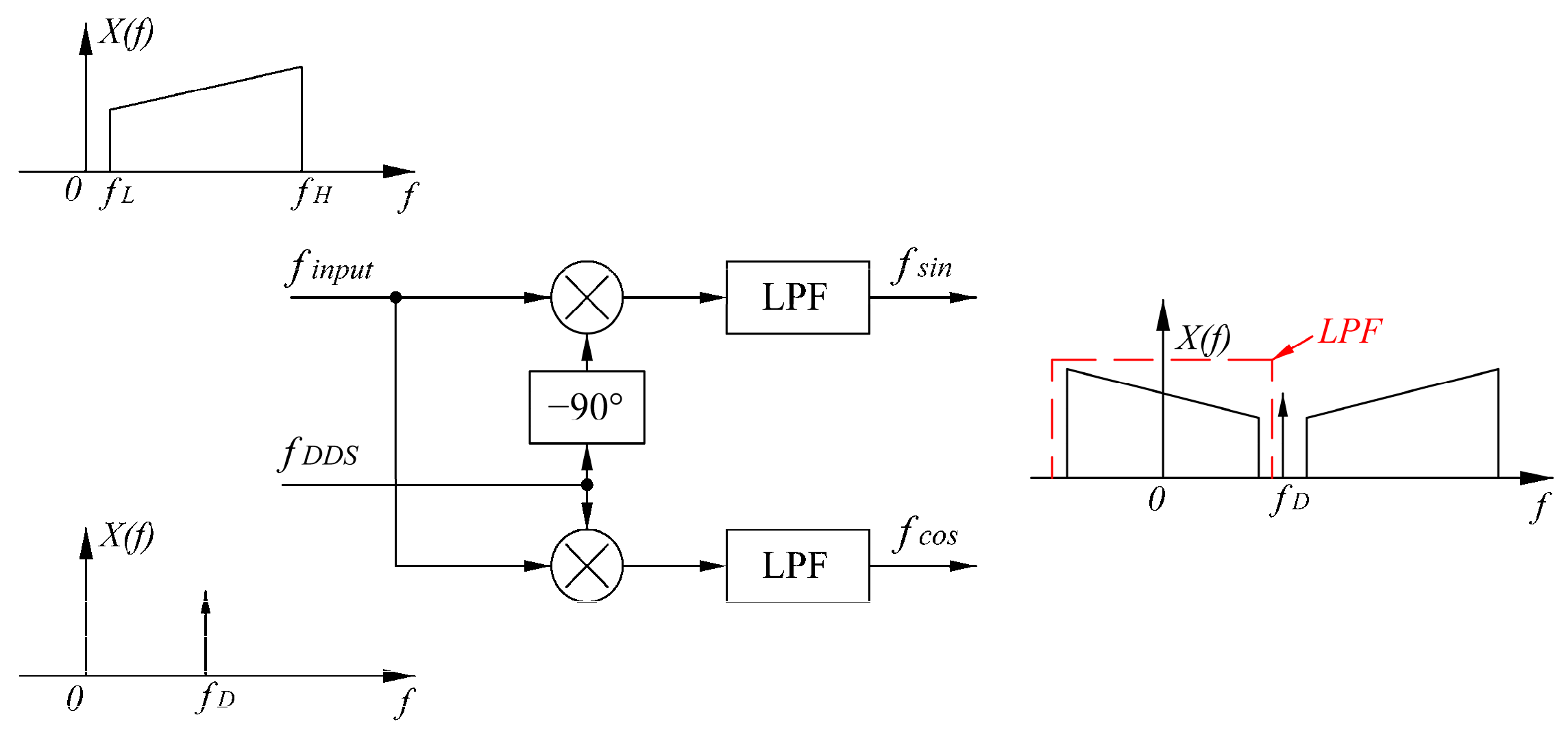
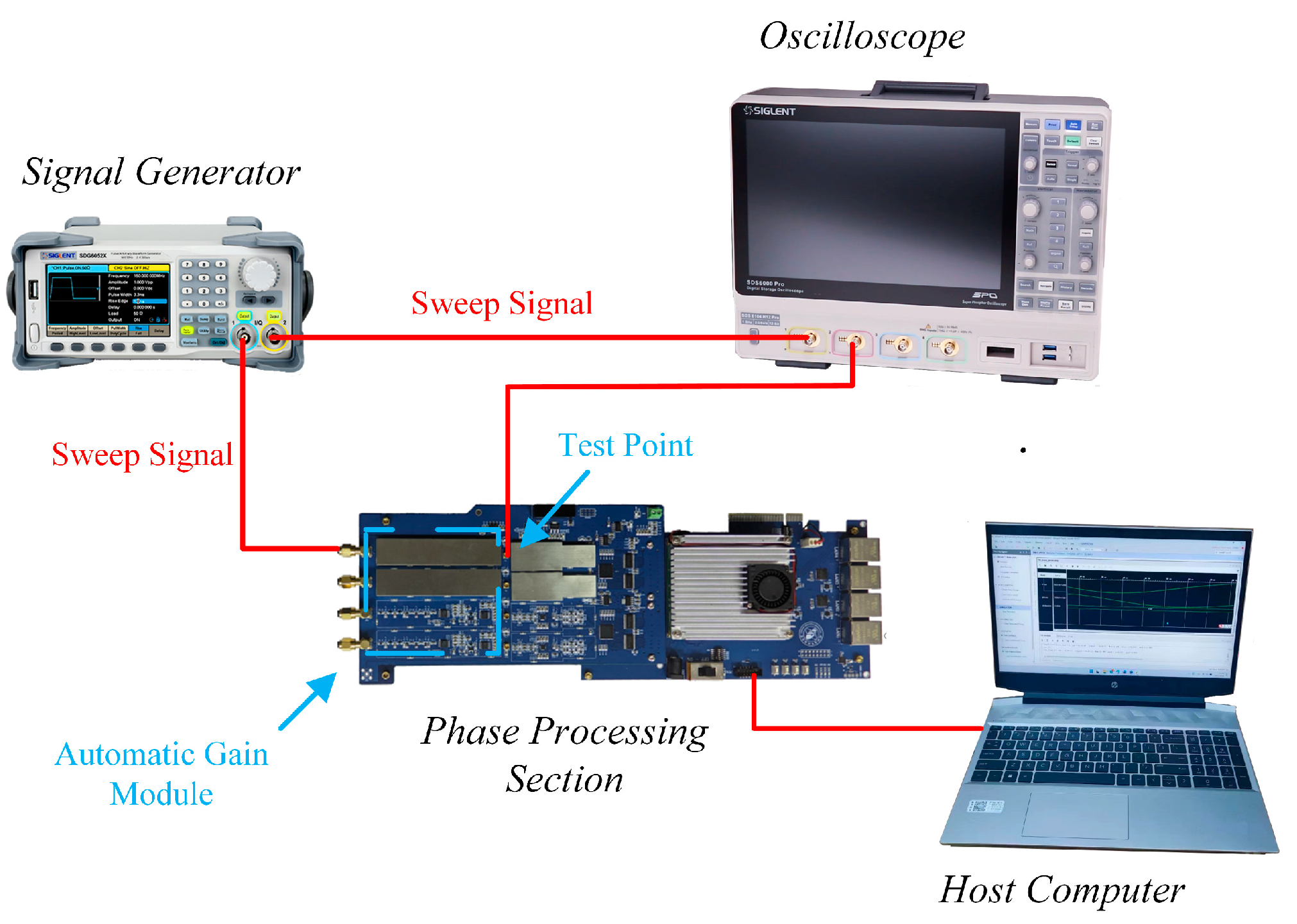
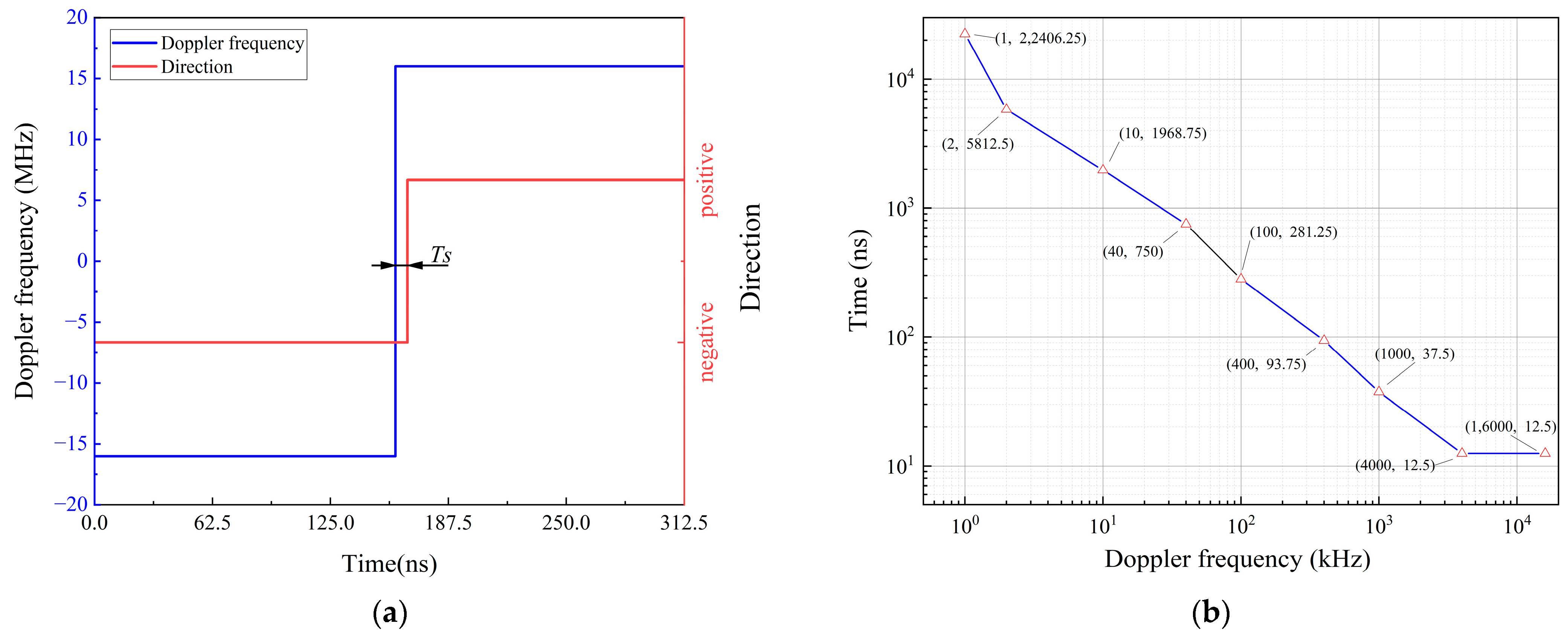
2.2.1. Design of the Real-Time Frequency Measurement Module
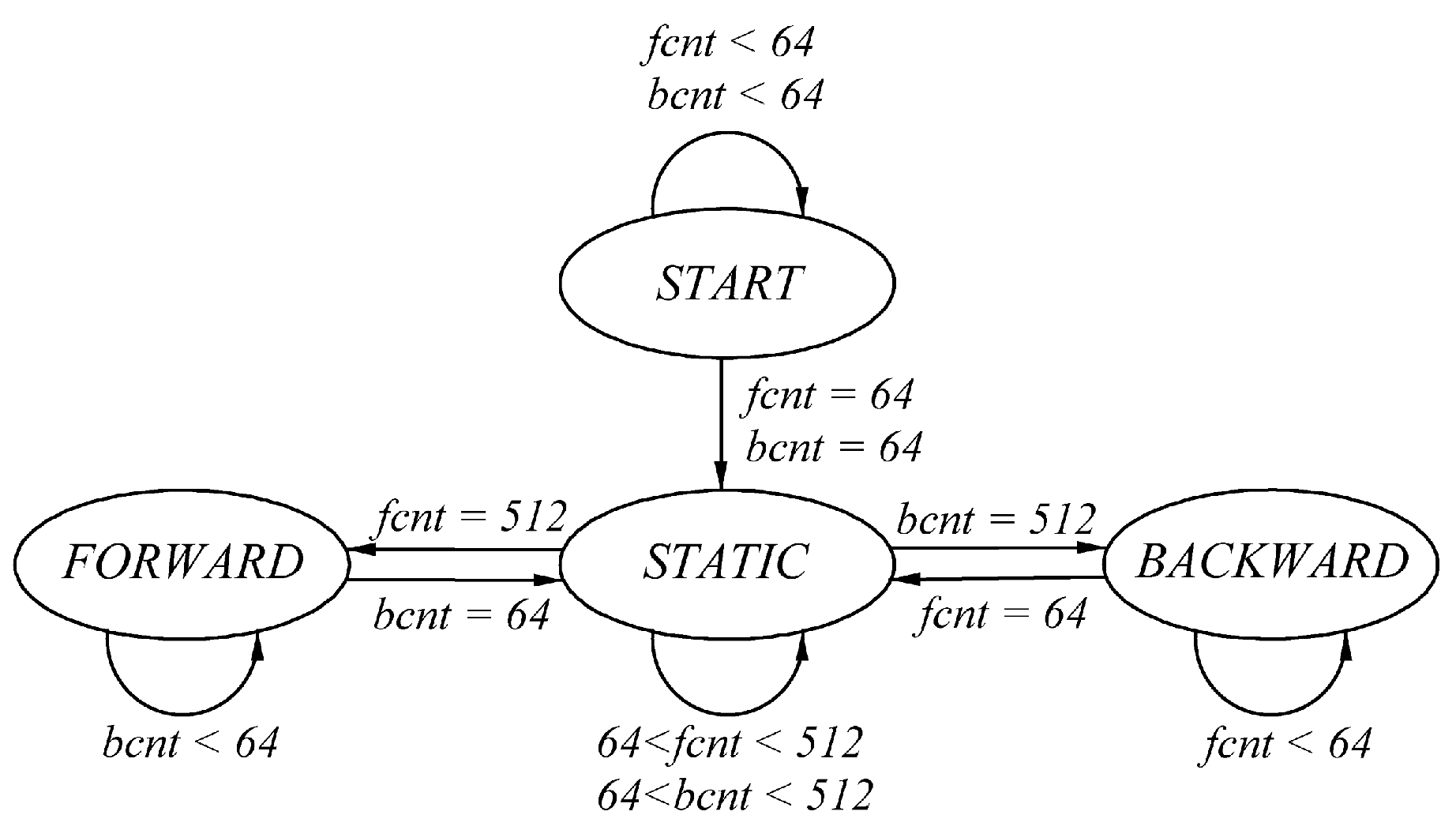
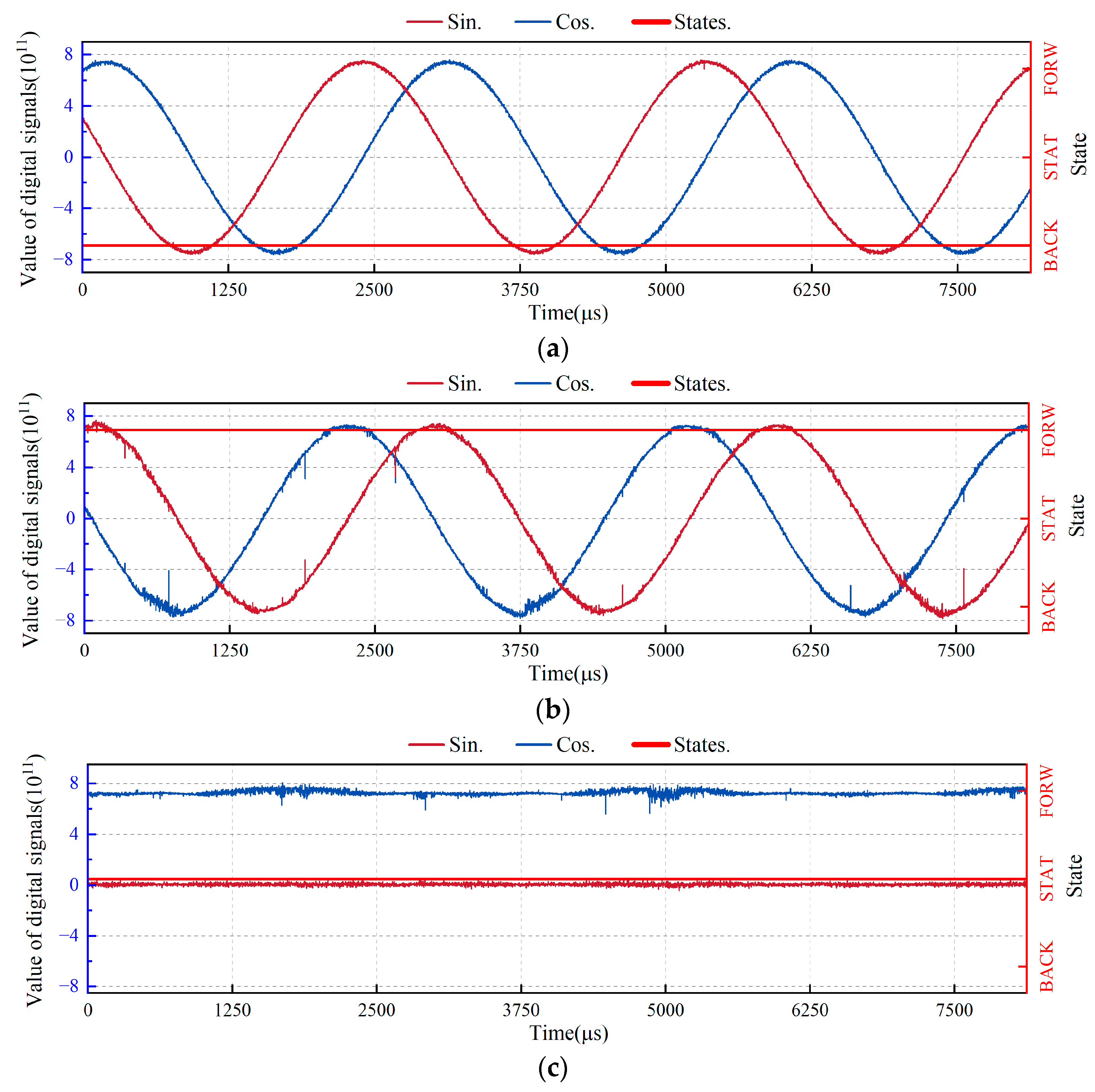
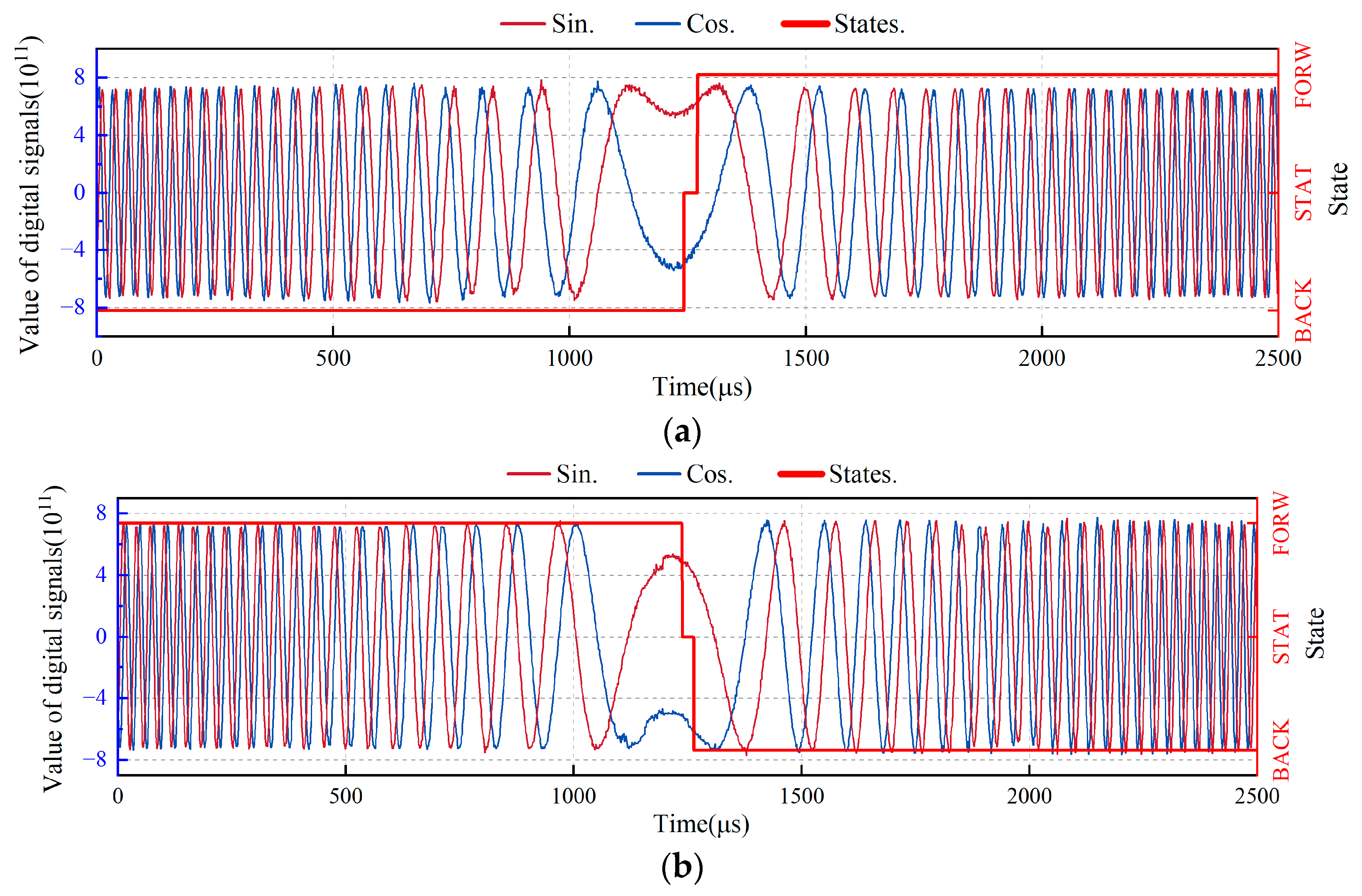
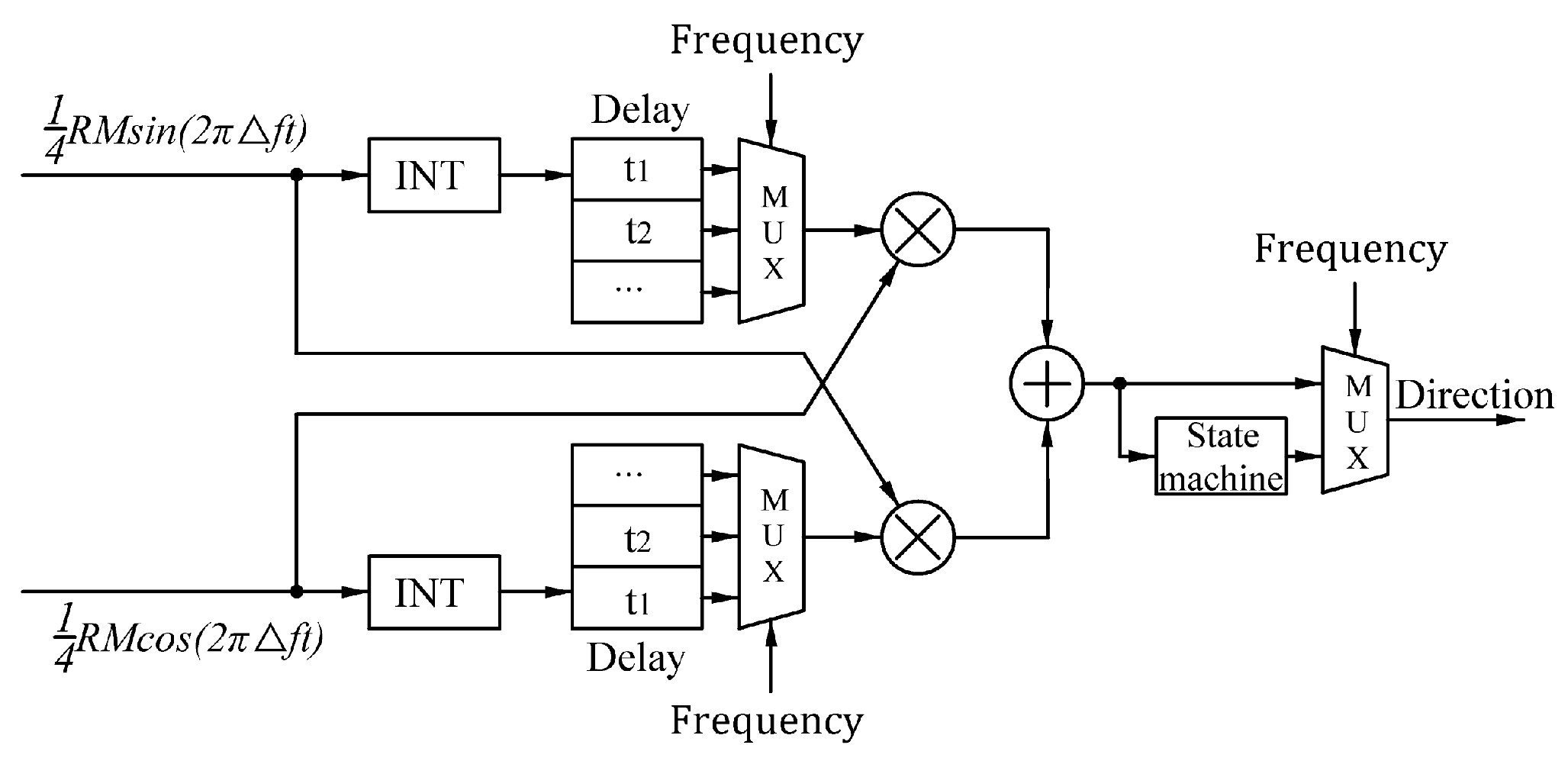
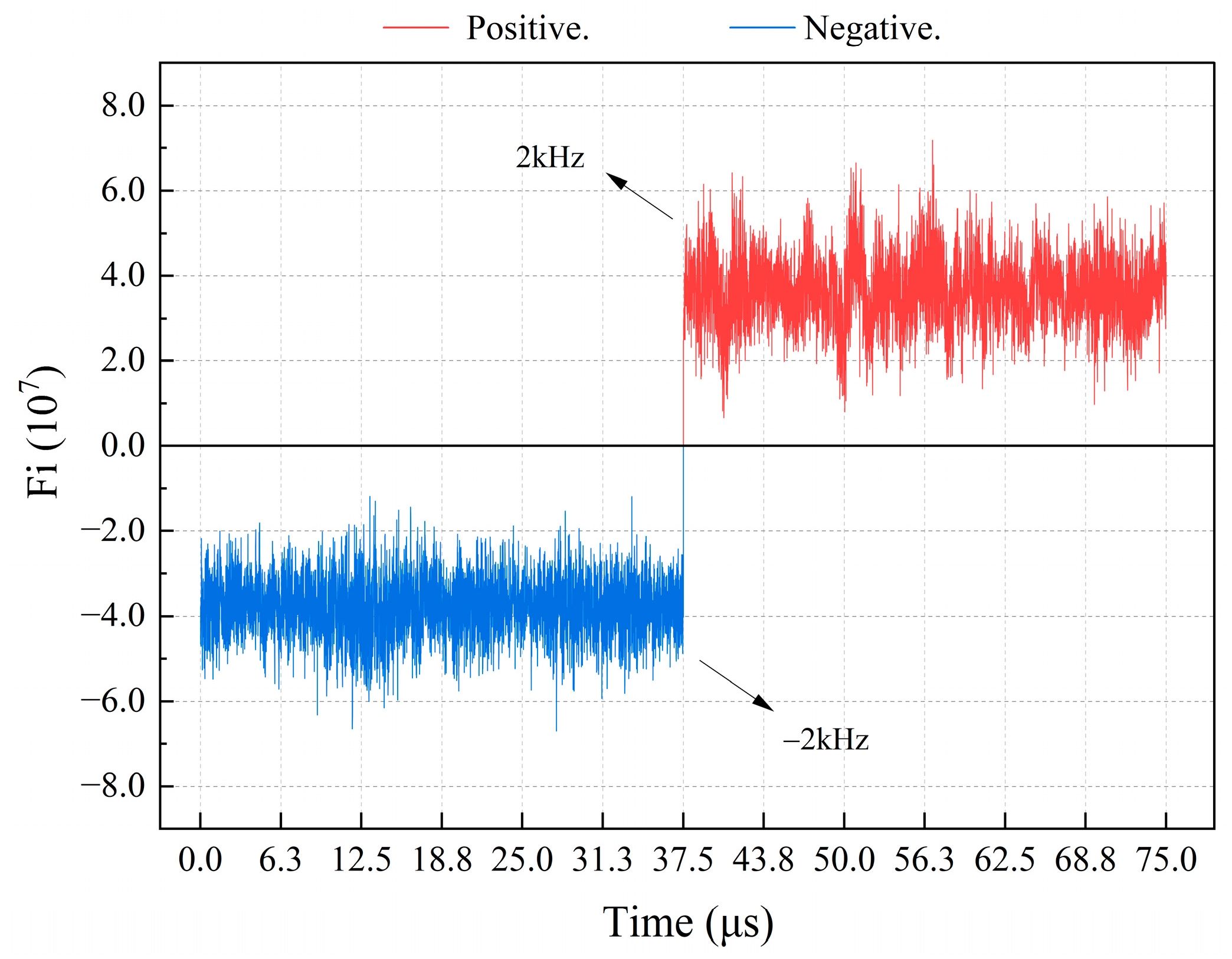
2.2.2. Design of a Real-Time Direction Judgment Module
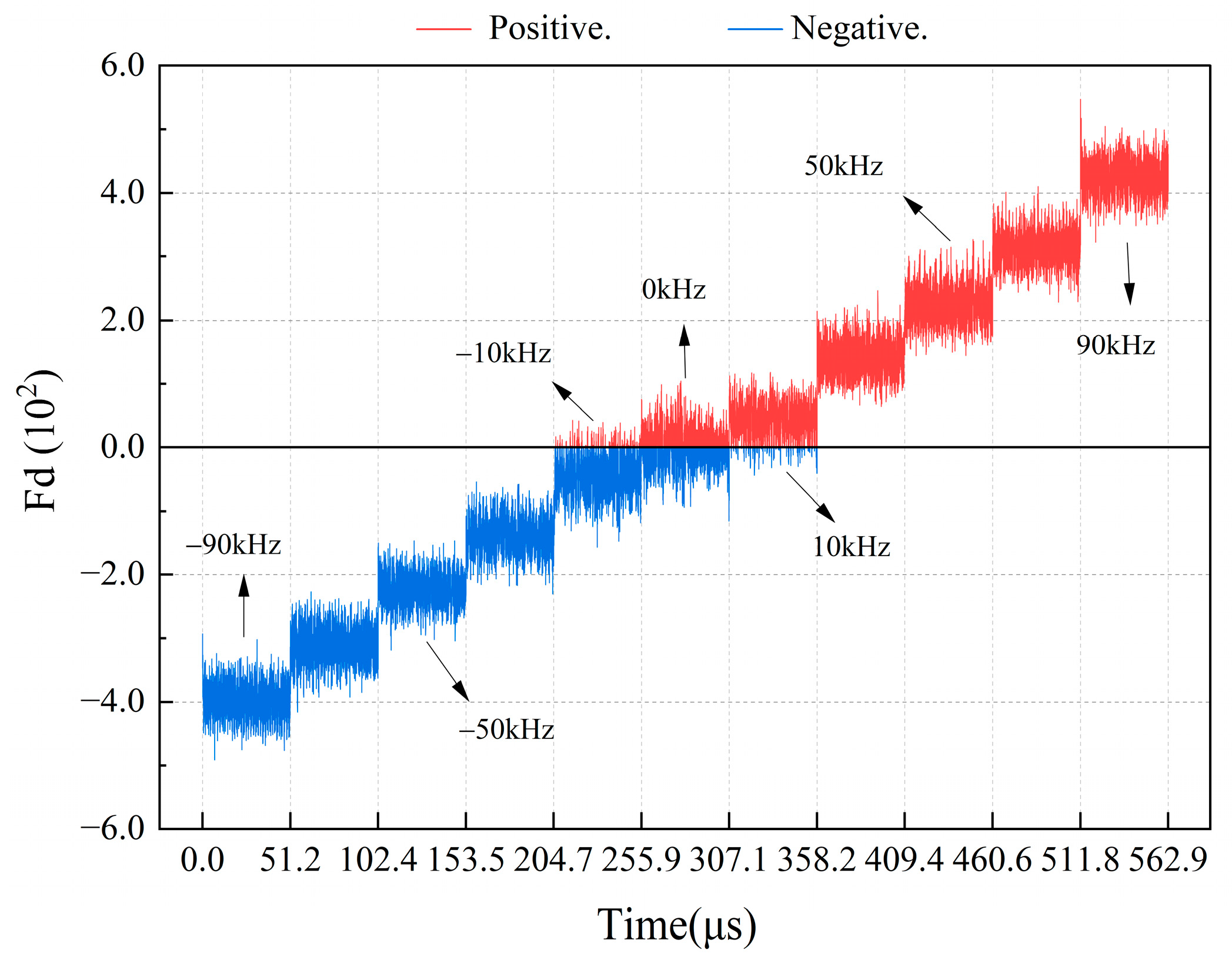
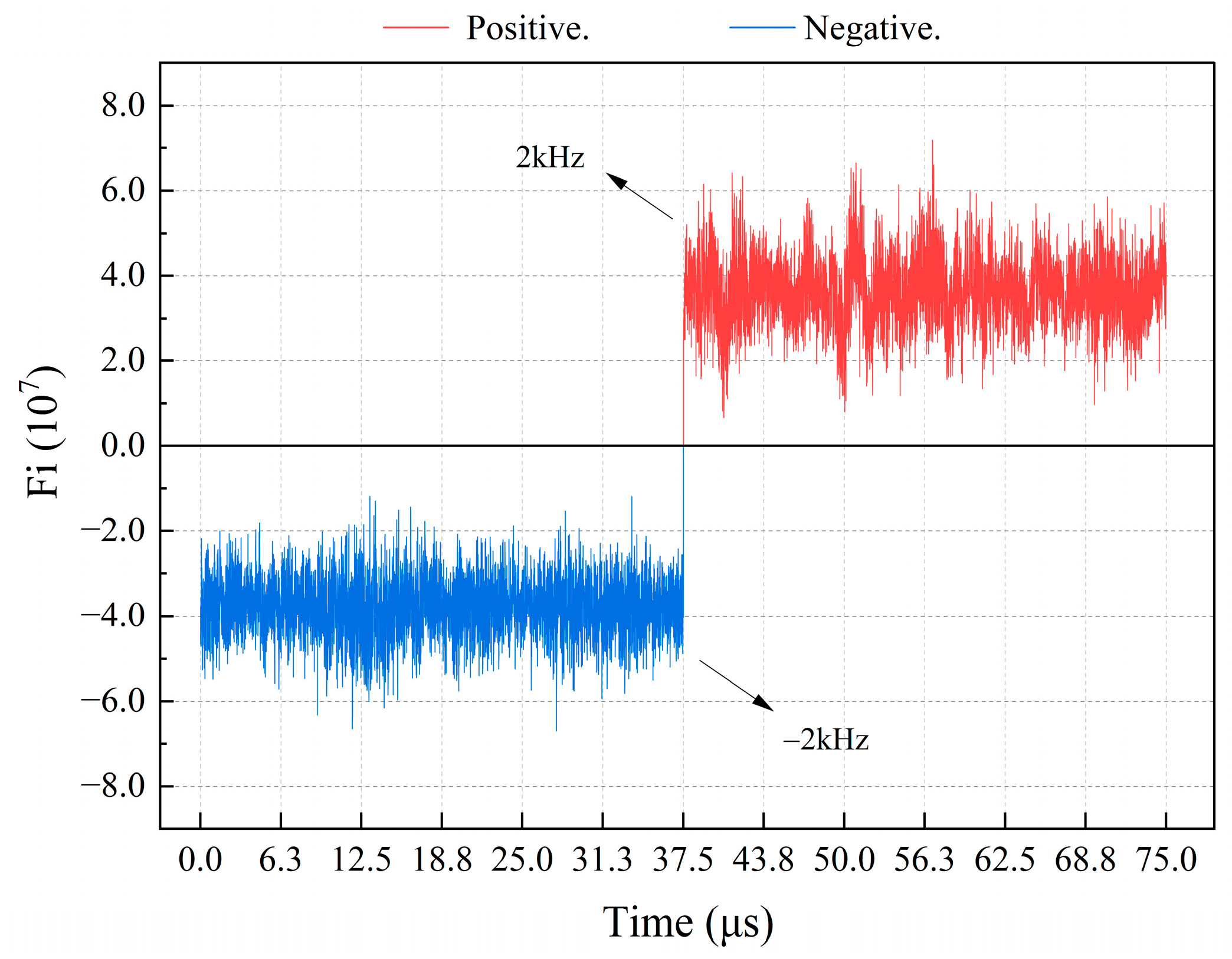
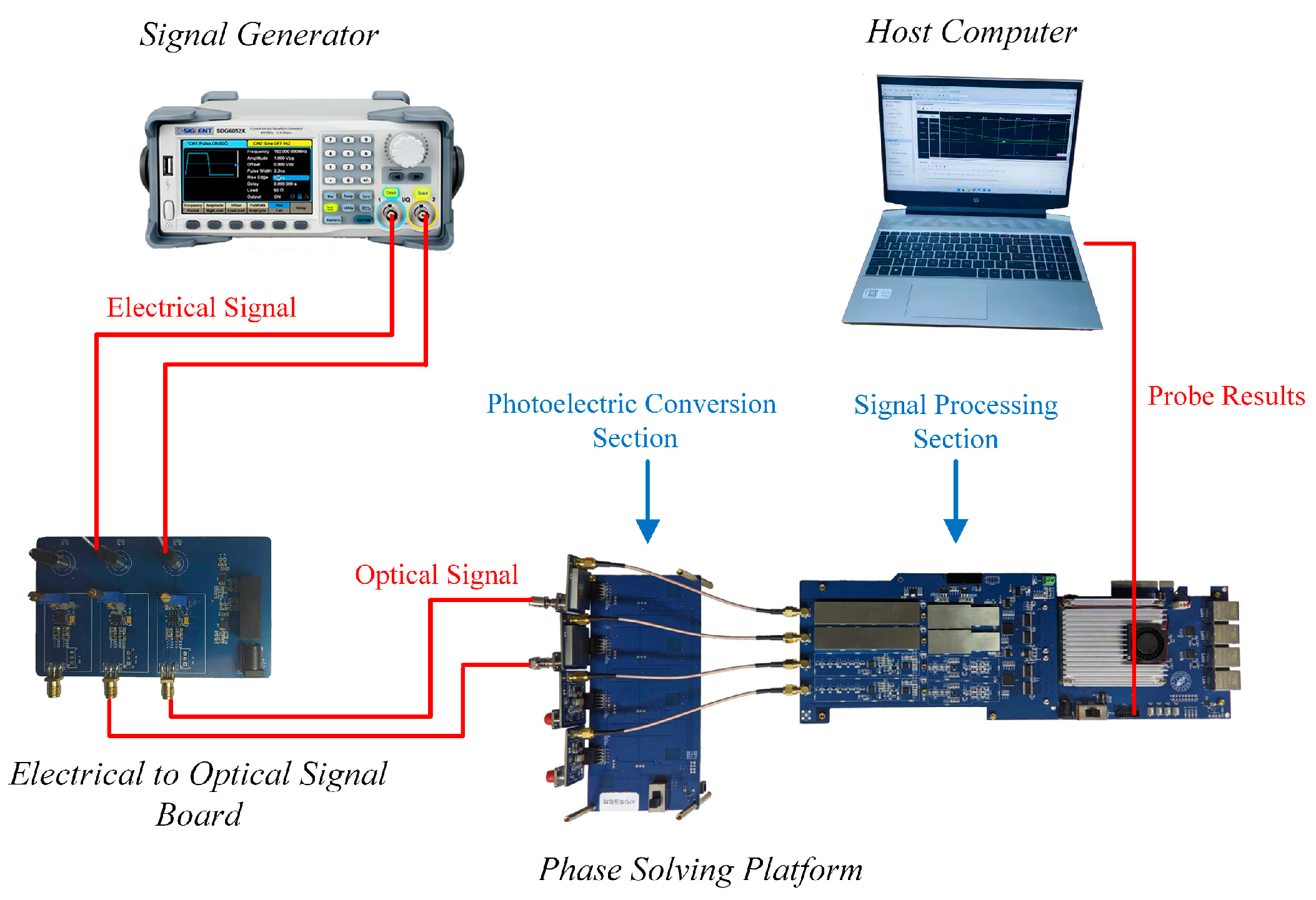
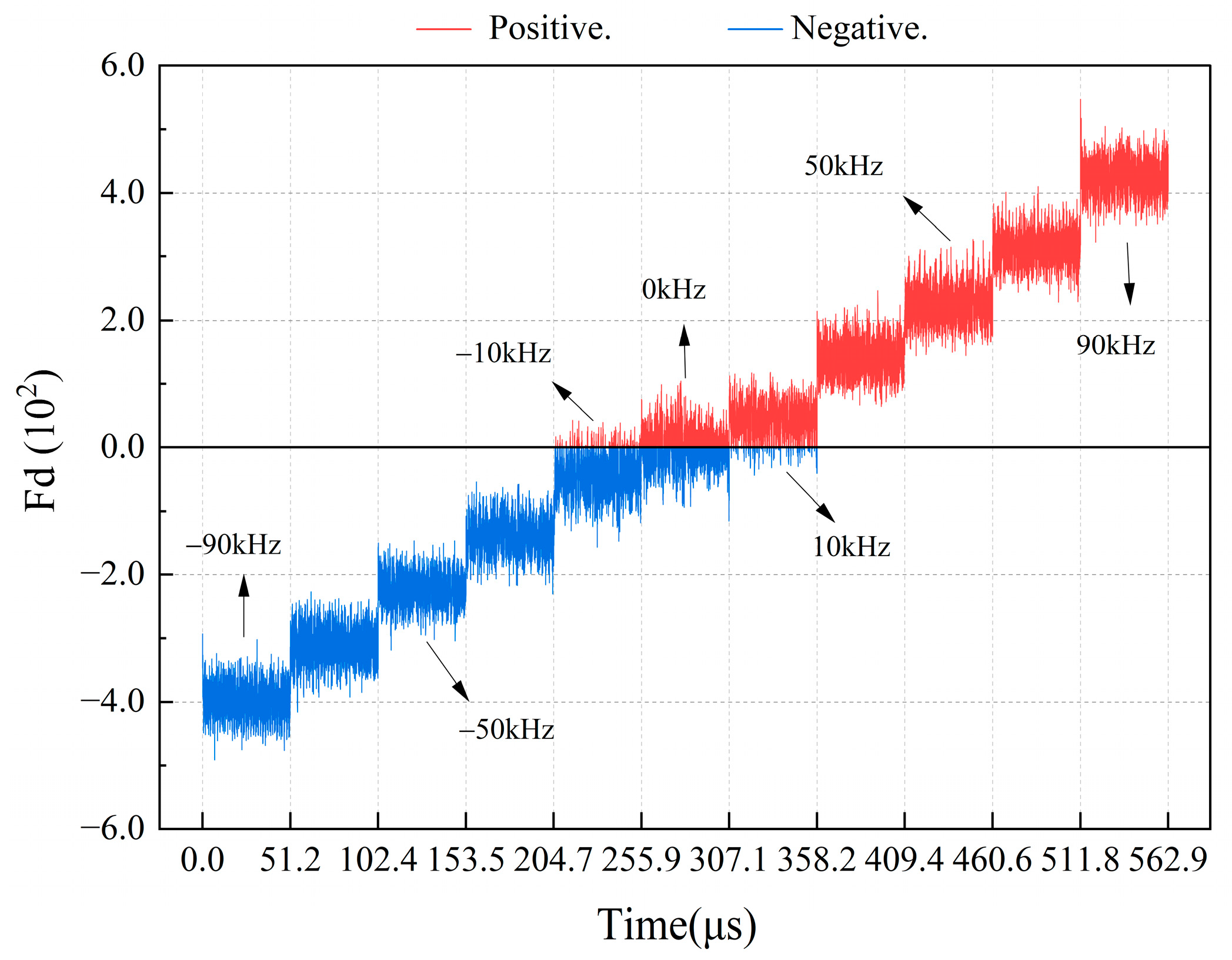
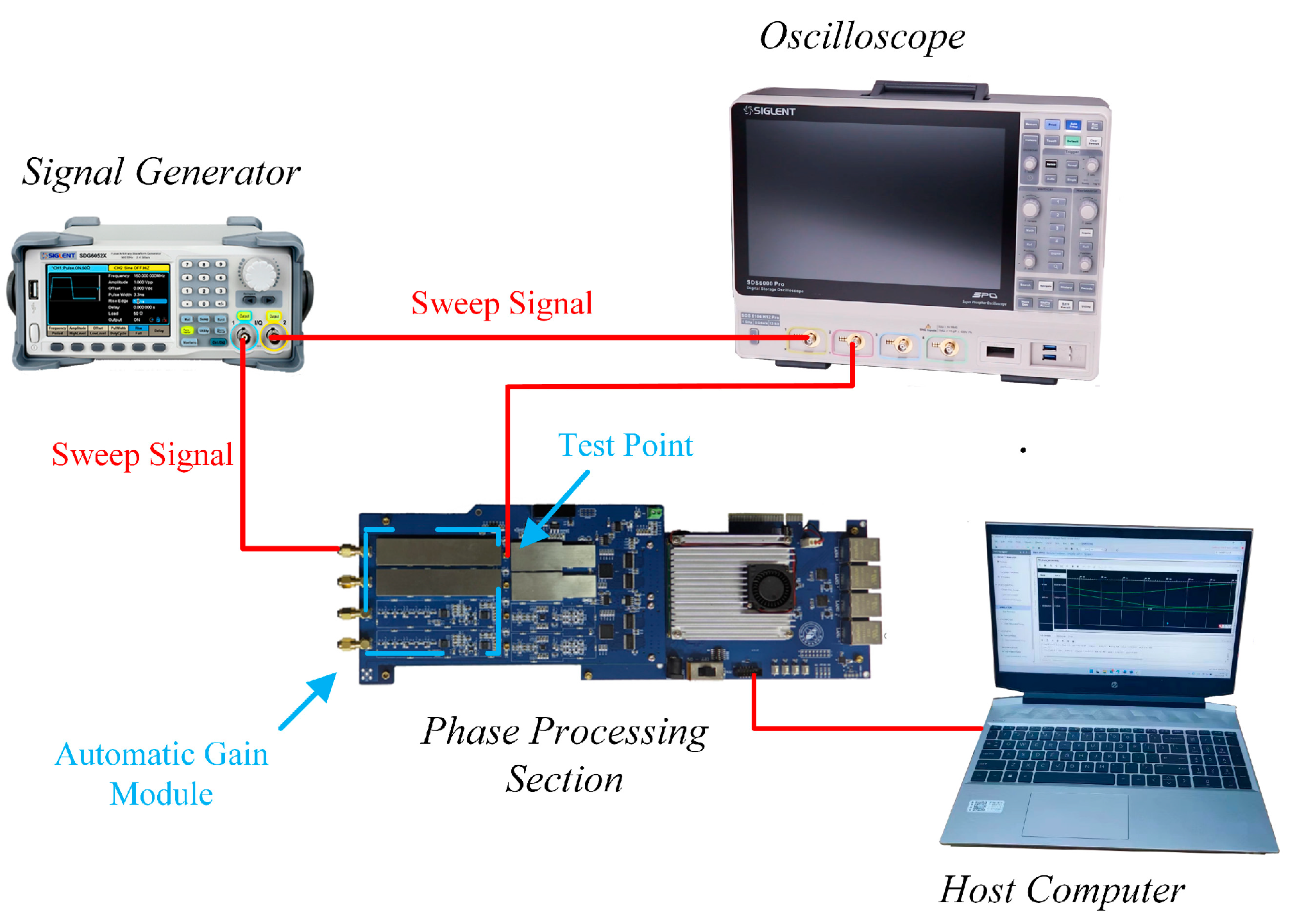
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, G.; Wang, S.; Li, X. A Reflective-Type Heterodyne Grating Interferometer for Three-Degree-of-Freedom Subnanometer Measurement. IEEE Trans. Instrum. Meas. 2022, 71, 7007509. [Google Scholar] [CrossRef]
- Dong, Y.; Zhang, J.; Zhang, C.; Fu, H.; Li, W.; Luo, W.; Hu, P. Analysis and Design of Fiber Microprobe Displacement Sensors Including Collimated Type and Convergent Type for Ultra-Precision Displacement Measurement. Micromachines 2024, 15, 224. [Google Scholar] [CrossRef] [PubMed]
- Zhang, E.; Chen, B.; Zheng, H.; Teng, X. Laser heterodyne interference signal processing method based on phase shift of reference signal. Opt. Express 2018, 26, 8656–8668. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Zhang, Y.; Liang, Y.; Tan, J. Measuring the Laser Polarization State and PBS Transmission Coefficients in a Heterodyne Laser Interferometer. IEEE Trans. Instrum. Meas. 2018, 67, 706–714. [Google Scholar] [CrossRef]
- Ye, W.N.; Ming, Z.; Yu, Z.; Wang, L.J.; Hu, J.C.; Li, X.; Hu, C.X. Real-time displacement calculation and offline geometric calibration of the grating interferometer system for ultra-precision wafer stage measurement. Precis. Eng. 2019, 60, 413–420. [Google Scholar] [CrossRef]
- Zhao, J.H. Research on the Key Technology of Signal Processing in Laser Heterodyne Interferometry with Picometer Resolution. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2016. [Google Scholar]
- Esquivel-Hernandez, J.; Martinez-Manuel, R. Resolution Improvement in a Multi-Point Fiber Refractometer Based on Coherent-OFDR. IEEE Photonics Technol. Lett. 2020, 32, 530–533. [Google Scholar] [CrossRef]
- Chang, C.-P.; Chang, S.-C.; Wang, Y.-C.; He, P.-Y. A Novel Analog Interpolation Method for Heterodyne Laser Interferometer. Micromachines 2023, 14, 696. [Google Scholar] [CrossRef] [PubMed]
- Pollinger, F.; Meiners-Hagen, K.; Wedde, M.; Abou-Zeid, A. Diode-laser-based high-precision absolute distance interferometer of 20 m range. Appl. Opt. 2009, 48, 6188–6194. [Google Scholar] [CrossRef]
- Xia, Y.Q.; Zhang, Y. Grating-Ruler signal based on FPGA. In Proceedings of the 2010 International Conference on Networking and Digital Society, Wenzhou, China, 30–31 May 2010; pp. 422–424. [Google Scholar] [CrossRef]
- Cai, H.J. Research on Picometer Resolution Hase Subdivision for Heterody Ne Laser Interferometer Signals. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2015. [Google Scholar]
- Li, S.M.; Wang, J.K.; Zhang, W.T.; Du, H.; Xiong, X.M. Real-Time Direction Judgment System of Sub-Nanometer Scale Grating Ruler. IEEE Access 2021, 9, 74939–74948. [Google Scholar] [CrossRef]
- Eom, T.; Choi, T.Y.; Lee, K.; Choi, H.; Lee, S. A simple method for the compensation of the heterodyne interferometer. Meas. Sci. Technol. 2002, 13, 222–225. [Google Scholar] [CrossRef]
- Fu, H.; Ji, R.; Hu, P.; Wang, Y.; Wu, G.; Tan, J. Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation. Sensors 2018, 18, 2768. [Google Scholar] [CrossRef]
- Giaconia, G.C.; Greco, G.; Mistretta, L.; Rizzo, R. FPGA based digital lock-in amplifier for fNIRS systems. In Proceedings of the Applications in Electronics Pervading Industry, Environment and Society: APPLEPIES 2017, Rome, Italy, 21–22 September 2017; Springer International Publishing: Cham, Switzerland, 2019; Volume 6, pp. 33–39. [Google Scholar]
- Zhou, W.; Li, W.; Liu, L.; Sun, Y.; Jiang, S.; Wang, W.; Chen, G.; Liu, Z. Bidirectional two-degree-of-freedom grating interferometer with biased Littrow configuration. Opt. Commun. 2024, 557, 130333. [Google Scholar] [CrossRef]
- Zhou, W.; Liu, Z.; Sun, Y.; Teng, H.; Wang, W.; Bayanheshig; Li, W. Bidirectional Littrow double grating interferometry for quadruple optical interpolation. Opt. Laser Technol. 2024, 175, 110751. [Google Scholar] [CrossRef]
- Zamiela, G.; Dobosz, M. Corner cube reflector lateral displacement evaluation simultaneously with interferometer length measurement. Opt. Laser Technol. 2013, 50, 118–124. [Google Scholar] [CrossRef]
- Paz, P.; Garrido, M. CORDIC-Based Computation of Arcsine and Arccosine Functions on FPGA; Department of Electronic Engineering, ETSI de Telecomunicación, Universidad Politécnica de Madrid: Madrid, Spain, 2023; Volume 70, p. 1. [Google Scholar] [CrossRef]
- Garrido, M.; Källström, P.; Kumm, M.; Gustafsson, O. CORDIC II: A New Improved CORDIC Algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 186–190. [Google Scholar] [CrossRef]
- Xing, X.; Wang, W. A New Recursive Trigonometric Technique for FPGA-Design Implementation. Sensors 2023, 23, 3683. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Chen, H.; Zhuang, Y.; Xie, Y. Fault Classification and Diagnosis Approach Using FFT-CNN for FPGA-Based CORDIC Processor. Electronics 2024, 13, 72. [Google Scholar] [CrossRef]
- He, C.; Yan, B.; Xu, S.; Zhang, Y.; Wang, Z.; Wang, M. Research and Hardware Implementation of a Reduced-Latency Quadruple-Precision Floating-Point Arctangent Algorithm. Electronics 2023, 12, 3472. [Google Scholar] [CrossRef]
- Zhang, Z.C. Dual-Frequency Laser Interference System Signal Processing Board design. Master’s Thesis, Guilin University of Electronic Science and Technology, Guilin, China, 2022. [Google Scholar]
- Xiong, X.M.; Zhang, Z.; Zhang, W.; Du, H.; Zeng, Q.L.; Xu, S.H.; Zhang, Y.T.; Zhao, Z. APD High Signal-to-Noise Ratio Gain Automatic Selection Control Device and Method. CN Patent Application CN202110577057.8, 27 August 2021. [Google Scholar]
- Xiong, X.M.; Zhang, W.; Zhang, Z.; Zeng, Q.L.; Du, H.; Xu, S.H.; Zhang, Y.T.; Zhao, Z. A Closed-Loop Controlled Synchronous Dynamic Gain Compensation Method for Laser Interferometry. CN Patent ZL202110578721.0, 16 May 2021. [Google Scholar]
- Fu, H.; Wu, G.; Hu, P.; Ji, R.; Tan, J.; Ding, X. Highly thermal-stable heterodyne interferometer with minimized periodic nonlinearity. Appl. Opt. 2018, 57, 1463–1467. [Google Scholar] [CrossRef]
- Yin, Y.; Liu, Z.; Jiang, S.; Wang, W.; Yu, H.; Jiri, G.; Hao, Q.; Li, W. High-precision 2D grating displacement measurement system based on double-spatial heterodyne optical path interleaving. Opt. Lasers Eng. 2022, 158, 107167. [Google Scholar] [CrossRef]
- Lu, L.P.; Hu, L.; Li, Z.; Qiu, L.R.; Huang, W.C.; Wang, X.L. High Precision Self-Mixing Interferometer Based on Reflective Phase Modulation Method. IEEE Access 2020, 8, 204153–204159. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Number |
|---|---|
| LUT | 326,080 |
| FF | 407,600 |
| DSP | 840 |
| Block RAM (KB) | 16,020 |
| GTX Transceivers | 16 |
| GPIO | 240 |
| Doppler Frequency | SNR (dB) |
|---|---|
| 300 Hz | 29.88 |
| 2 kHz | 30.97 |
| 10 kHz | 32.60 |
| 40 kHz | 33.49 |
| 100 kHz | 33.56 |
| 400 kHz | 30.77 |
| 1 MHz | 31.84 |
| 16 MHz | 30.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Q.; Chen, W.; Du, H.; Zhang, W.; Xiong, X.; Zhao, Z.; Zhou, F.; Guo, X.; Xu, L. Real-Time Direction Judgment System for Dual-Frequency Laser Interferometer. Sensors 2024, 24, 2030. https://doi.org/10.3390/s24072030
Zeng Q, Chen W, Du H, Zhang W, Xiong X, Zhao Z, Zhou F, Guo X, Xu L. Real-Time Direction Judgment System for Dual-Frequency Laser Interferometer. Sensors. 2024; 24(7):2030. https://doi.org/10.3390/s24072030
Chicago/Turabian StyleZeng, Qilin, Wenwei Chen, Hua Du, Wentao Zhang, Xianming Xiong, Zhengyi Zhao, Fangjun Zhou, Xin Guo, and Le Xu. 2024. "Real-Time Direction Judgment System for Dual-Frequency Laser Interferometer" Sensors 24, no. 7: 2030. https://doi.org/10.3390/s24072030
APA StyleZeng, Q., Chen, W., Du, H., Zhang, W., Xiong, X., Zhao, Z., Zhou, F., Guo, X., & Xu, L. (2024). Real-Time Direction Judgment System for Dual-Frequency Laser Interferometer. Sensors, 24(7), 2030. https://doi.org/10.3390/s24072030