
Concurrent Supra-Postural Auditory–Hand Coordination Task Affects Postural Control: Using Sonification to Explore Environmental Unpredictability in Factors Affecting Fall Risk


Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Apparatus
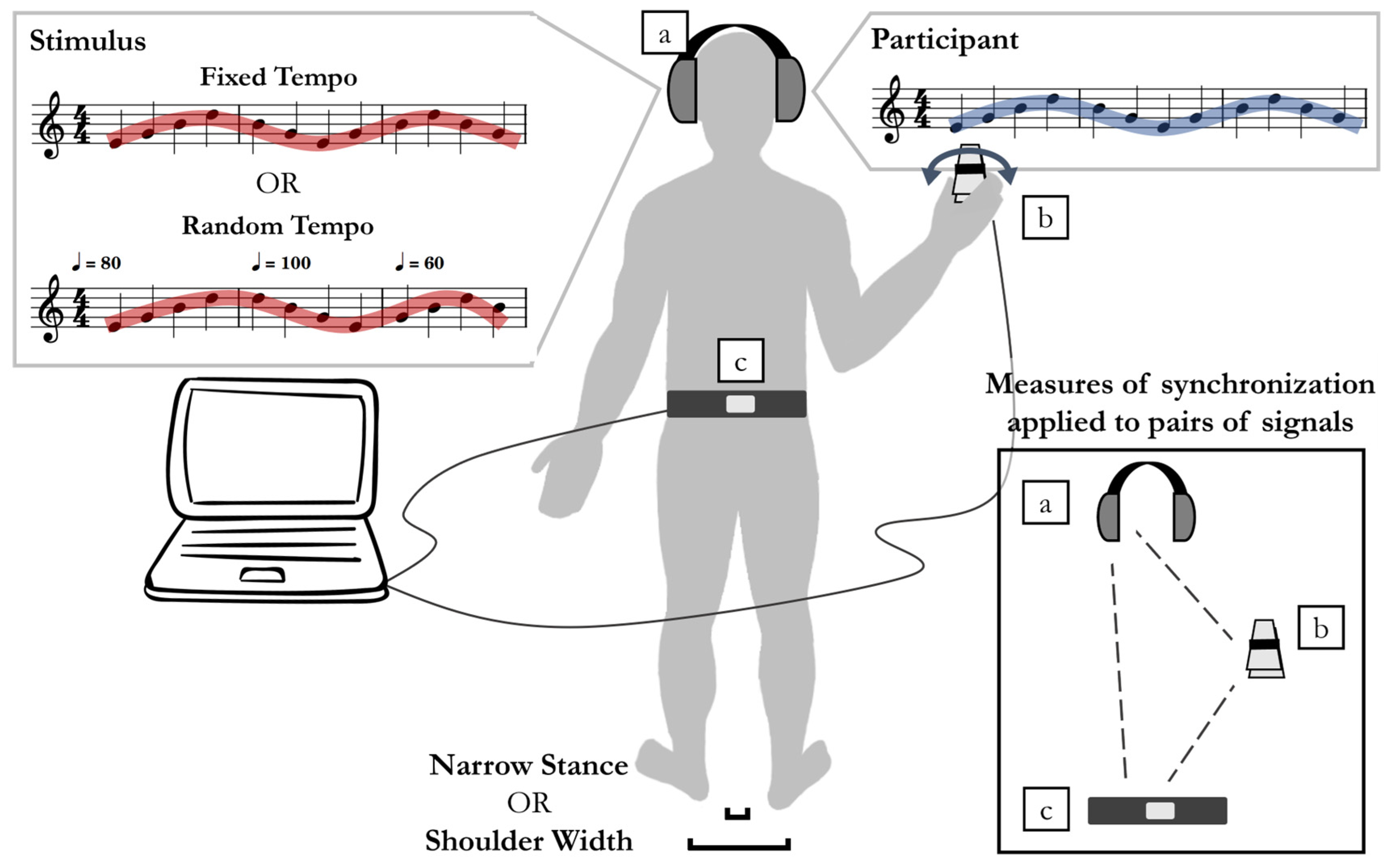
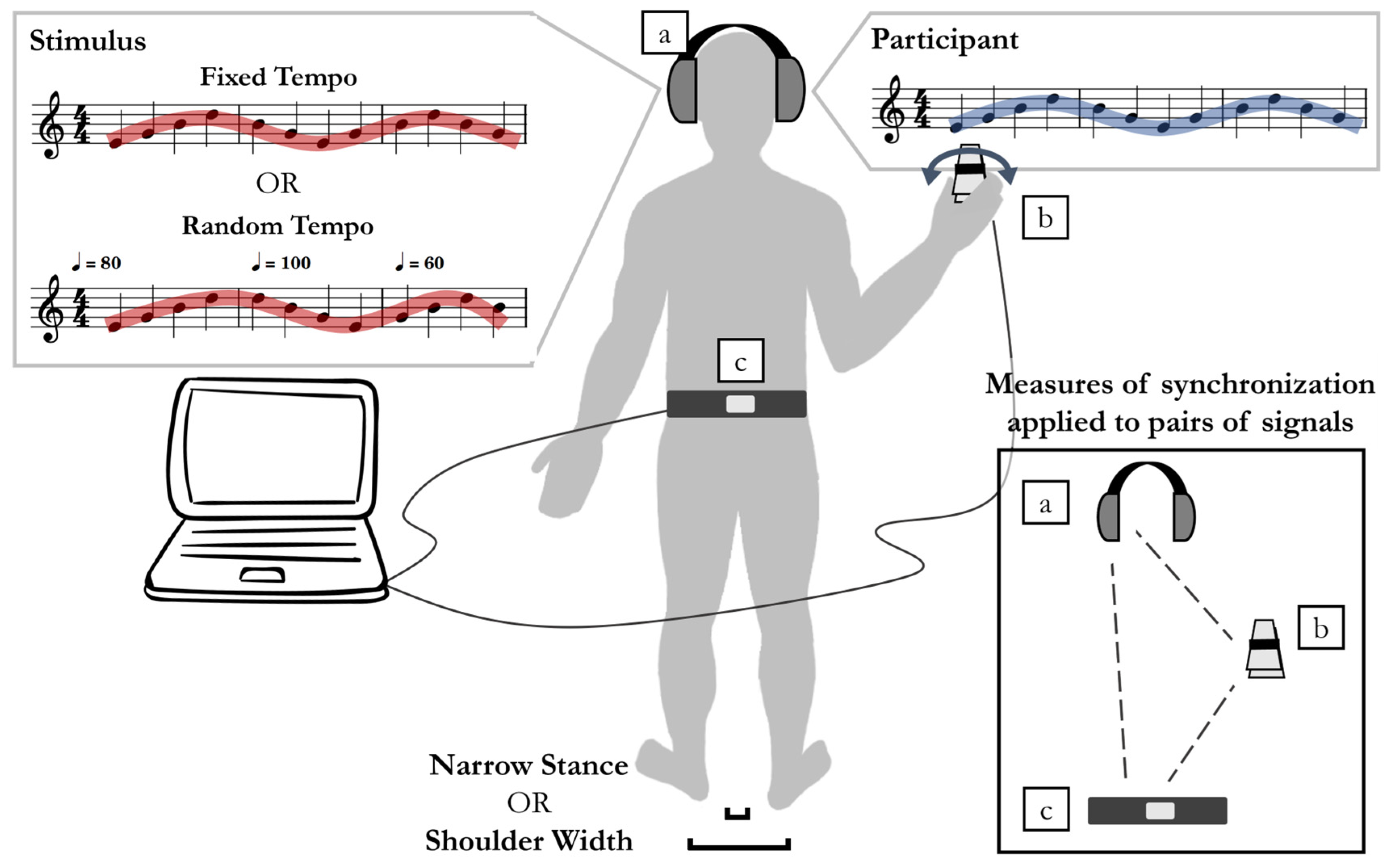
2.3. Task
2.4. Design
2.5. Stimuli
2.6. Procedure
2.7. Measures
2.7.1. Performance
2.7.2. Synchronization with Postural Fluctuations
2.8. Statistical Analysis
3. Results
3.1. Hearing and Mobility Questionnaires
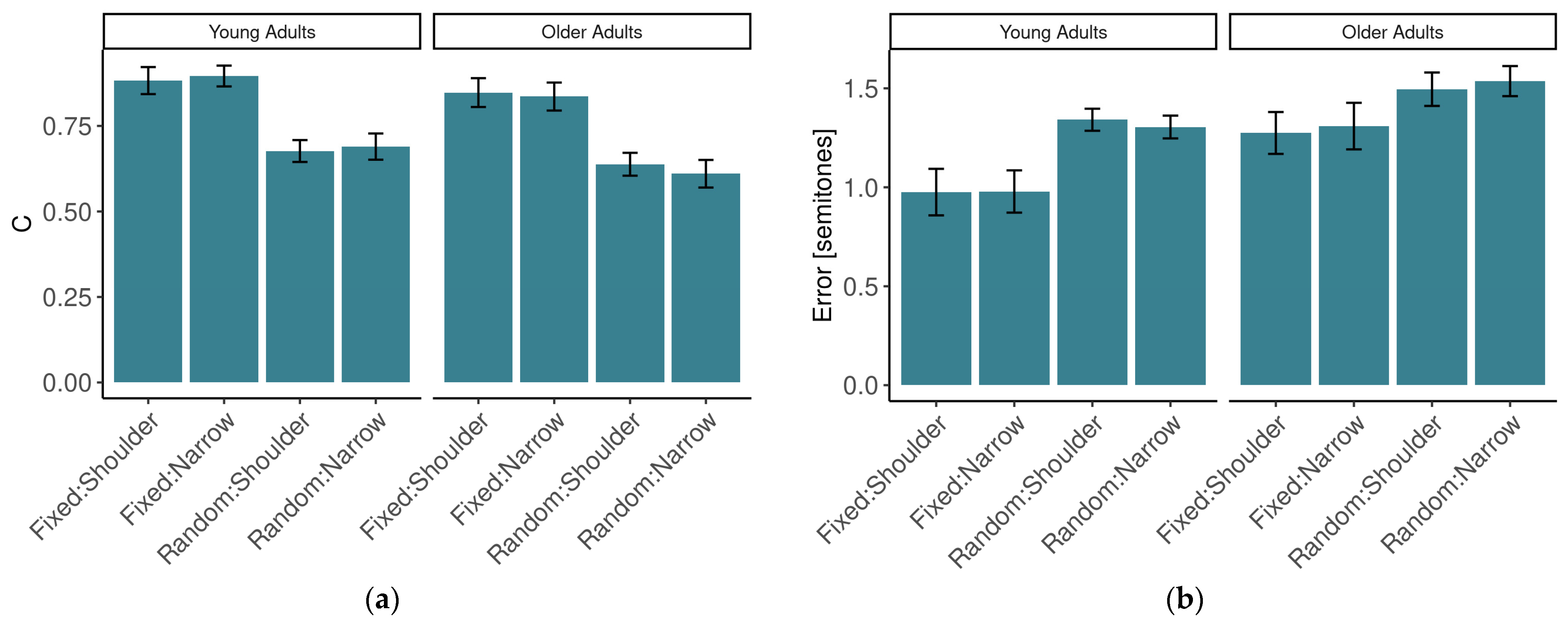
3.2. Performance on Matching Hand Movements to the Sound Stimulus
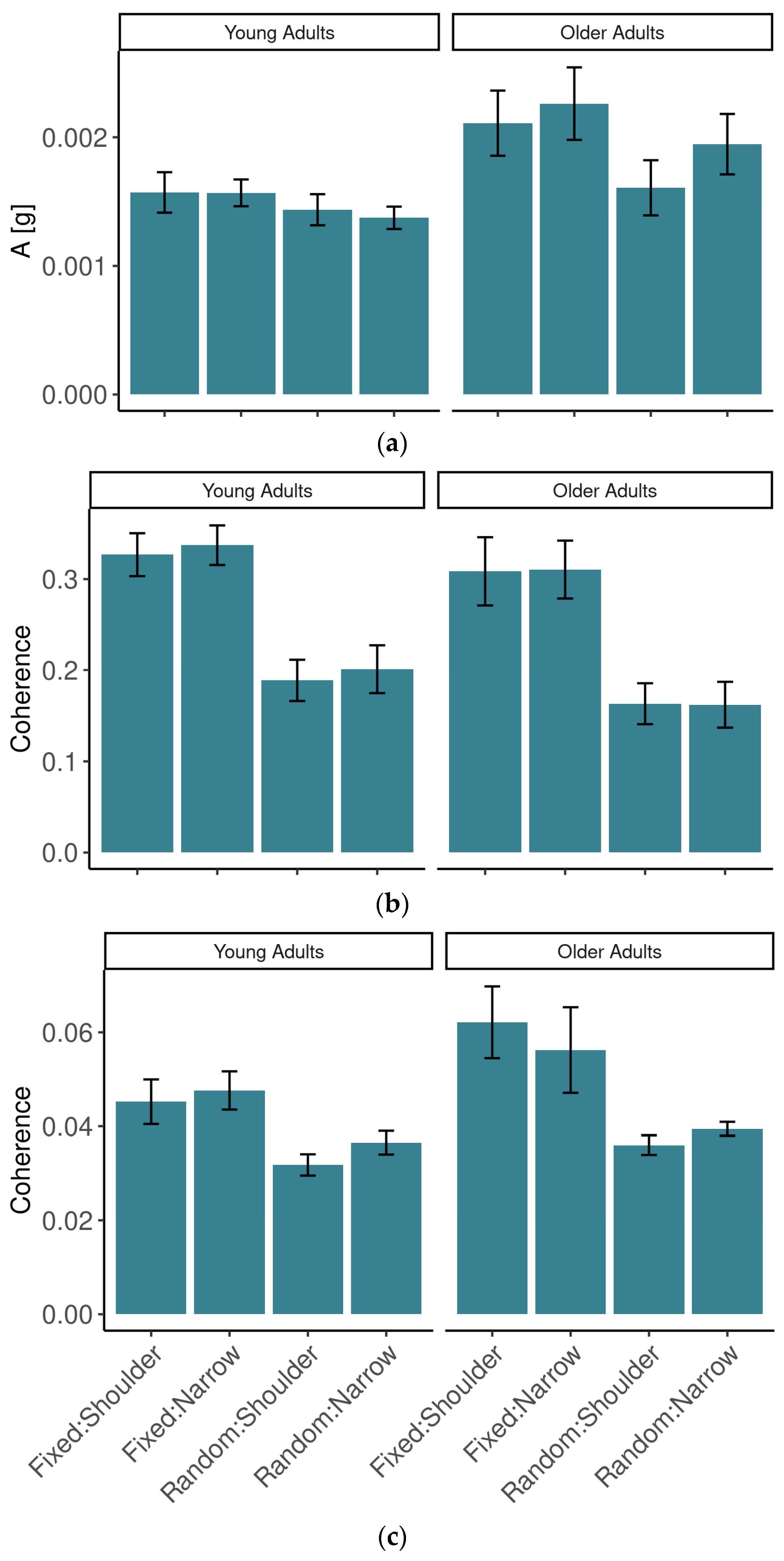
3.3. Postural Synchronization with the Auditory Hand Movement Task
3.4. Association between Postural Synchronization and Auditory Hand-Matching Performance
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Sonification Engine
Appendix B. Cross-Wavelet Analysis

Appendix C. Linear Model Table

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model 1 | Model 2 | Model 3 | Model 4 | Model 5 | Model 6 | |
|---|---|---|---|---|---|---|
| β0: Y, Fixed tempo, Shoulder-width | 0.760 (0.024) ‡ | 0.745 (0.034) ‡ | 0.771 (0.039) ‡ | 0.943 (0.034) ‡ | 0.943 (0.035) ‡ | 0.862 (0.049) ‡ |
| β1: A | 8.325 (13.337) | 9.897 (13.418) | −31.351 (9.693) † | −31.358 (9.735) † | 21.544 (23.744) | |
| β2: O | −0.058 (0.048) | −0.038 (0.043) | −0.038 (0.043) | 0.059 (0.060) | ||
| β3: Random tempo | −0.221 (0.011) ‡ | −0.221 (0.011) ‡ | −0.218 (0.011) ‡ | |||
| β4: Narrow stance | 0.000 (0.011) | 0.002 (0.011) | ||||
| β5: A in O | −62.153 (25.639) * | |||||
| AIC | −277.907 | −276.264 | −275.720 | −528.183 | −526.183 | −529.953 |
| BIC | −266.316 | −260.810 | −256.401 | −505.001 | −499.137 | −499.043 |
| Log-Likelihood | 141.953 | 142.132 | 142.860 | 270.091 | 270.091 | 272.976 |
| Number of observations | 352 | 352 | 352 | 352 | 352 | 352 |
| Number of random effects groupings | 22 | 22 | 22 | 22 | 22 | 22 |
| Variance of individual intercepts σ0i | 0.011 | 0.012 | 0.011 | 0.009 | 0.009 | 0.010 |
| Variance of residual σij | 0.023 | 0.023 | 0.023 | 0.011 | 0.011 | 0.010 |
References
- Tinetti, M.E.; Speechley, M.; Ginter, S.F. Risk Factors for Falls among Elderly Persons Living in the Community. N. Engl. J. Med. 1988, 319, 1701–1707. [Google Scholar] [CrossRef]
- Tinetti, M.E.; Doucette, J.; Claus, E.; Marottoli, R. Risk Factors for Serious Injury During Falls by Older Persons in the Community. J. Am. Geriatr. Soc. 1995, 43, 1214–1221. [Google Scholar] [CrossRef]
- CDC. Facts About Falls|Fall Prevention|Injury Center|. Available online: https://www.cdc.gov/falls/facts.html (accessed on 11 December 2023).
- Patla, A.E.; Shumway-Cook, A. Dimensions of Mobility: Defining the Complexity and Difficulty Associated with Community Mobility. J. Aging Phys. Act. 1999, 7, 7–19. [Google Scholar] [CrossRef]
- Frank, J.S.; Patla, A.E. Balance and mobility challenges in older adults: Implications for preserving community mobility. Am. J. Prev. Med. 2003, 25 (Suppl. 2), 157–163. [Google Scholar] [CrossRef] [PubMed]
- Horak, F.B.; Mancini, M.; Carlson-Kuhta, P.; Nutt, J.G.; Salarian, A. Balance and Gait Represent Independent Domains of Mobility in Parkinson Disease. Phys. Ther. 2016, 96, 1364–1371. [Google Scholar] [CrossRef] [PubMed]
- Jeka, J.; Oie, K.; Schöner, G.; Dijkstra, T.; Henson, E. Position and Velocity Coupling of Postural Sway to Somatosensory Drive. J. Neurophysiol. 1998, 79, 1661–1674. [Google Scholar] [CrossRef] [PubMed]
- Jeka, J.J.; Schöner, G.; Dijkstra, T.; Ribeiro, P.; Lackner, J.R. Coupling of fingertip somatosensory information to head and body sway. Exp. Brain Res. 1997, 113, 475–483. [Google Scholar] [CrossRef] [PubMed]
- Teasdale, N.; Bard, C.; Larue, J.; Fleury, M. On the cognitive penetrability of posture control. Exp. Aging Res. 1993, 19, 1–13. [Google Scholar] [CrossRef]
- Woollacott, M.; Shumway-Cook, A. Attention and the control of posture and gait: A review of an emerging area of research. Gait Posture 2002, 16, 1–14. [Google Scholar] [CrossRef]
- Fraizer, E.V.; Mitra, S. Methodological and interpretive issues in posture-cognition dual-tasking in upright stance. Gait Posture 2008, 27, 271–279. [Google Scholar] [CrossRef]
- Li, W.; Keegan, T.H.M.; Sternfeld, B.; Sidney, S.; Quesenberry, C.P.; Kelsey, J.L. Outdoor Falls Among Middle-Aged and Older Adults: A Neglected Public Health Problem. Am. J. Public Health 2006, 96, 1192–1200. [Google Scholar] [CrossRef]
- Lord, S.R. Visual risk factors for falls in older people. Age Ageing 2006, 35 (Suppl. 2), ii42–ii45. [Google Scholar] [CrossRef] [PubMed]
- Zukowski, L.A.; Iyigün, G.; Giuliani, C.A.; Plummer, P. Effect of the environment on gait and gaze behavior in older adult fallers compared to older adult non-fallers. PLoS ONE 2020, 15, e0230479. [Google Scholar] [CrossRef] [PubMed]
- Thomas, E.; Martines, F.; Bianco, A.; Messina, G.; Giustino, V.; Zangla, D.; Iovane, A.; Palma, A. Decreased postural control in people with moderate hearing loss. Medicine 2018, 97, e0244. [Google Scholar] [CrossRef]
- Kanegaonkar, R.G.; Amin, K.; Clarke, M. The contribution of hearing to normal balance. J. Laryngol. Otol. 2012, 126, 984–988. [Google Scholar] [CrossRef]
- Maatoug, H.; Baccouch, R.; Borji, R.; Rebai, H.; Sahli, S. Effects of Music Listening on Postural Balance in Adolescents with Visual Impairment. Percept. Mot. Ski. 2023, 130, 112–126. [Google Scholar] [CrossRef] [PubMed]
- Stoffregen, T.A.; Villard, S.; Kim, C.G.; Ito, K.; Bardy, B.G. Coupling of Head and Body Movement With Motion of the Audible Environment. J. Exp. Psychol. Hum. Percept. Perform. 2009, 35, 1221. [Google Scholar] [CrossRef]
- Lubetzky, A.V.; Gospodarek, M.; Arie, L.; Kelly, J.; Roginska, A.; Cosetti, M. Auditory Input and Postural Control in Adults: A Narrative Review. JAMA Otolaryngol. Head Neck Surg. 2020, 146, 480–487. [Google Scholar] [CrossRef]
- Coste, A.; Salesse, R.N.; Gueugnon, M.; Marin, L.; Bardy, B.G. Standing or swaying to the beat: Discrete auditory rhythms entrain stance and promote postural coordination stability. Gait Posture 2018, 59, 28–34. [Google Scholar] [CrossRef]
- Altın, B.; Aksoy, S. Investigation of the effects of cognitive tasks on balance performance in young adults. Am. J. Otolaryngol. 2020, 41, 102663. [Google Scholar] [CrossRef]
- Richer, N.; Lajoie, Y. Cognitive task modality influences postural control during quiet standing in healthy older adults. Aging Clin. Exp. Res. 2019, 31, 1265–1270. [Google Scholar] [CrossRef]
- Lin, F.R.; Ferrucci, L. Hearing Loss and Falls Among Older Adults in the United States. Arch. Intern. Med. 2012, 172, 369–371. [Google Scholar] [CrossRef]
- Viljanen, A.; Kaprio, J.; Pyykkö, I.; Sorri, M.; Pajala, S.; Kauppinen, M.; Koskenvuo, M.; Rantanen, T. Hearing as a Predictor of Falls and Postural Balance in Older Female Twins. J. Gerontol. Ser. A 2009, 64, 312–317. [Google Scholar] [CrossRef]
- Li, L.; Simonsick, E.M.; Ferrucci, L.; Lin, F.R. Hearing loss and gait speed among older adults in the United States. Gait Posture 2013, 38, 25–29. [Google Scholar] [CrossRef]
- Agmon, M.; Lavie, L.; Doumas, M. The Association between Hearing Loss, Postural Control, and Mobility in Older Adults: A Systematic Review. J. Am. Acad. Audiol. 2017, 28, 575–588. [Google Scholar] [CrossRef] [PubMed]
- Hays, R.D.; Spritzer, K.L.; Amtmann, D.; Lai, J.S.; DeWitt, E.M.; Rothrock, N.; DeWalt, D.A.; Riley, W.T.; Fries, J.F.; Krishnan, E. Upper-Extremity and Mobility Subdomains From the Patient-Reported Outcomes Measurement Information System (PROMIS) Adult Physical Functioning Item Bank. Arch. Phys. Med. Rehabil. 2013, 94, 2291–2296. [Google Scholar] [CrossRef] [PubMed]
- Ventry, I.M.; Weinstein, B.E. The Hearing Handicap Inventory for the Elderly: A New Tool. Ear Hear. 1982, 3, 128–134. [Google Scholar] [CrossRef] [PubMed]
- Mayagoitia, R.E.; Lötters, J.C.; Veltink, P.H.; Hermens, H. Standing balance evaluation using a triaxial accelerometer. Gait Posture 2002, 16, 55–59. [Google Scholar] [CrossRef] [PubMed]
- Neville, C.; Ludlow, C.; Rieger, B. Measuring postural stability with an inertial sensor: Validity and sensitivity. Med. Devices Evid. Res. 2015, 8, 447–455. [Google Scholar] [CrossRef] [PubMed]
- Grinsted, A.; Moore, J.C.; Jevrejeva, S. Application of the cross wavelet transform and wavelet coherence to geophysical time series. Nonlinear Process. Geophys. 2004, 11, 561–566. [Google Scholar] [CrossRef]
- Harrison, S.J.; Kinsella-Shaw, J.M.; Dotov, D. Effects of footedness and stance asymmetry confirm an inter-leg metastable coordination dynamics of standing posture. J. Mot. Behav. 2020, 53, 135–156. [Google Scholar] [CrossRef] [PubMed]
- de Vries, O.J.; Peeters, G.M.E.E.; Lips, P.; Deeg, D.J.H. Does frailty predict increased risk of falls and fractures? A prospective population-based study. Osteoporos. Int. 2013, 24, 2397–2403. [Google Scholar] [CrossRef]
- Nowak, A.; Hubbard, R.E. Falls and frailty: Lessons from complex systems. J. R. Soc. Med. 2009, 102, 98–102. [Google Scholar] [CrossRef] [PubMed]
- Brickman, A.M.; Siedlecki, K.L.; Muraskin, J.; Manly, J.J.; Luchsinger, J.A.; Yeung, L.K.; Brown, T.R.; DeCarli, C.; Stern, Y. White matter hyperintensities and cognition: Testing the reserve hypothesis. Neurobiol. Aging 2011, 32, 1588–1598. [Google Scholar] [CrossRef] [PubMed]
- Allen, J.S.; Bruss, J.; Damasio, H. The aging brain: The cognitive reserve hypothesis and hominid evolution. Am. J. Hum. Biol. 2005, 17, 673–689. [Google Scholar] [CrossRef]
- Katzman, R.; Terry, R.; DeTeresa, R.; Brown, T.; Davies, P.; Fuld, P.; Renbing, X.; Peck, A. Clinical, pathological, and neurochemical changes in dementia: A subgroup with preserved mental status and numerous neocortical plaques. Ann. Neurol. 1988, 23, 138–144. [Google Scholar] [CrossRef]
- Latash, M.L. The bliss (not the problem) of motor abundance (not redundancy). Exp. Brain Res. 2012, 217, 1–5. [Google Scholar] [CrossRef]
- Latash, M.L. One more time about motor (and non-motor) synergies. Exp. Brain Res. 2021, 239, 2951–2967. [Google Scholar] [CrossRef]
- Stoffregen, T.A.; Pagulayan, R.J.; Bardy, B.G.; Hettinger, L.J. Modulating postural control to facilitate visual performance. Hum. Mov. Sci. 2000, 19, 203–220. [Google Scholar] [CrossRef]
- Schneider, D.M.; Mooney, R. How Movement Modulates Hearing. Annu. Rev. Neurosci. 2018, 41, 553–572. [Google Scholar] [CrossRef]
- Tillman, M.; Dahl, L.; Knowlton, C.B.; Zaferiou, A. Real-Time Optical Motion Capture Balance Sonification System. In Proceedings of the 7th International Conference on Movement and Computing, in MOCO’20, New York, NY, USA, 15–17 July 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Linnhoff, D.; Ploigt, R.; Mattes, K. Sofigait—A Wireless Inertial Sensor-Based Gait Sonification System. Sensors 2022, 22, 8782. [Google Scholar] [CrossRef] [PubMed]
- Wall, C.; McMeekin, P.; Walker, R.; Hetherington, V.; Graham, L.; Godfrey, A. Sonification for Personalised Gait Intervention. Sensors 2024, 24, 65. [Google Scholar] [CrossRef] [PubMed]
- Ji, Z.; Hu, W.; Wang, Z.; Yang, K.; Wang, K. Seeing through Events: Real-Time Moving Object Sonification for Visually Impaired People Using Event-Based Camera. Sensors 2021, 21, 3558. [Google Scholar] [CrossRef]
- Hu, W.; Wang, K.; Yang, K.; Cheng, R.; Ye, Y.; Sun, L.; Xu, Z. A Comparative Study in Real-Time Scene Sonification for Visually Impaired People. Sensors 2020, 20, 3222. [Google Scholar] [CrossRef]
- Carlile, S. Psychoacoustics. In The Sonification Handbook; Logos Publishing House: Berlin, Germany, 2011. [Google Scholar]
- Ebeling, W.; Sokolov, I.M. Statistical Thermodynamics and Stochastic Theory of Nonequilibrium Systems; World Scientific: Singapore, 2005. [Google Scholar]
- Haken, H. Distribution function for classical and quantum systems far from thermal equilibrium. Z. Phys. 1973, 263, 267–282. [Google Scholar] [CrossRef]
- Dotov, D.G.; Kim, S.; Frank, T.D. Non-equilibrium thermodynamical description of rhythmic motion patterns of active systems: A canonical-dissipative approach. Biosystems 2015, 128, 26–36. [Google Scholar] [CrossRef] [PubMed]
- Cook, S.P.R. Sound Synthesis for Auditory Display. In The Sonification Handbook; Logos Publishing House: Berlin, Germany, 2011. [Google Scholar]
- Puckette, M. The Theory and Technique of Electronic Music; World Scientific: Singapore, 2007. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dotov, D.; Motsenyat, A.; Trainor, L.J. Concurrent Supra-Postural Auditory–Hand Coordination Task Affects Postural Control: Using Sonification to Explore Environmental Unpredictability in Factors Affecting Fall Risk. Sensors 2024, 24, 1994. https://doi.org/10.3390/s24061994
Dotov D, Motsenyat A, Trainor LJ. Concurrent Supra-Postural Auditory–Hand Coordination Task Affects Postural Control: Using Sonification to Explore Environmental Unpredictability in Factors Affecting Fall Risk. Sensors. 2024; 24(6):1994. https://doi.org/10.3390/s24061994
Chicago/Turabian StyleDotov, Dobromir, Ariel Motsenyat, and Laurel J. Trainor. 2024. "Concurrent Supra-Postural Auditory–Hand Coordination Task Affects Postural Control: Using Sonification to Explore Environmental Unpredictability in Factors Affecting Fall Risk" Sensors 24, no. 6: 1994. https://doi.org/10.3390/s24061994
APA StyleDotov, D., Motsenyat, A., & Trainor, L. J. (2024). Concurrent Supra-Postural Auditory–Hand Coordination Task Affects Postural Control: Using Sonification to Explore Environmental Unpredictability in Factors Affecting Fall Risk. Sensors, 24(6), 1994. https://doi.org/10.3390/s24061994