
A Multi-Level Operation Method for Improving the Resilience of Power Systems under Extreme Weather through Preventive Control and a Virtual Oscillator

 ,
,
Abstract
1. Introduction
- This paper introduces a novel method of preventive control for power systems, particularly focusing on the power constraints between successive failures. This method is significant, as it considers both the combined ramping capability of generators within the local supply area and the power transmission capacity from the external grid before the occurrence of successive failures. This approach is designed to ensure that the normal electricity demand within the local supply area is met, even in the face of potential disruptions. Such a preventive control mechanism is innovative in its comprehensive approach to power system resilience, especially in scenarios of extreme weather and high-risk conditions for cascading failures.
- The paper proposes a VOC-based adaptive frequency control strategy for power systems. A key element of innovation here is the dynamic adjustment of the VOC loop coefficients according to the system’s operating conditions during transient states. This adaptive strategy marks a significant advancement over traditional VOC implementations, where coefficients are usually static. By dynamically adjusting the VOC loop coefficients, this method enhances the frequency recovery rate, offering a more responsive and efficient approach to frequency regulation under varying system conditions.
2. Upper-Level Preventive Control Considering Successive Failures
- (1)
- Power flow constraint: The power system must satisfy the power flow equations, and the line flow should be within the prescribed limits [26].where and are the active and reactive power injected into bus i of all kinds of generation systems, including generators, energy storage units, wind power systems, etc. and are the active and reactive power demands at bus i of all kinds of loads. and are the active and reactive power from the i-th bus to the j-th bus. and represent the admittance parameter between transmission line ij. and represent the active power limits of transmission line ij. and denote the reactive power limits of transmission line ij.
- (2)
- System reserve constraint: The system needs positive and negative spinning reserve capacity to mitigate the impact of uncertainties in wind power and load forecasting, thus ensuring the security and stability of the system operation.where and represent the proportional forecasting errors of the system load and wind power, respectively. and denote the positive/negative spinning reserve capacity of generator i at time t. and denote the positive/negative spinning reserve capacity of energy storage unit i at time t. denotes the total load within the system, while denotes the forecasted wind power output.
- (3)
- Constraints on the operation of the generator: These encompass the constraints on the output, the ramping constraints, the startup and shutdown times, and the reserve constraints of generators.where and , respectively, denote the upper and lower limits of the active power output of generator i. represents the startup time of generator i during time period t, while represents the shutdown time of generator i during time period t. denotes the minimum allowable startup time for generator i, and represents the minimum allowable shutdown time for generator i. and represent the upward and downward ramp rates of generator i, respectively. denotes the minimum scheduling period.
- (4)
- Constraints on the operation of the energy storage unit: These encompass constraints on the reserve and capacity of energy storage units.where represents the rated power of energy storage unit i, while and represent the minimum and maximum energy capacities of storage unit i. represents the charge or discharge efficiency of storage unit i.
- (5)
- Power constraint between successive failures: Following a power system failure, isolated operation in certain regions or limited interconnection with the rest of the large power grid may ensue. In such scenarios, the affected area may experience insufficient generation capacity. In particular, in the intervals between consecutive failures, without a well-orchestrated generation plan, generators within the region may struggle to swiftly adjust their output to anticipate the next contingency. Additionally, due to transmission constraints, the remainder of the large power grid may be unable to supply adequate power to this area, thereby increasing the risk of widespread power outages in the power system.
- (6)
- Constraint on renewable energy output: The actual dispatch output of wind power must not exceed the forecasted wind power output.where represents the actual output of wind power.
3. Lower-Level Control Based on Virtual Oscillator
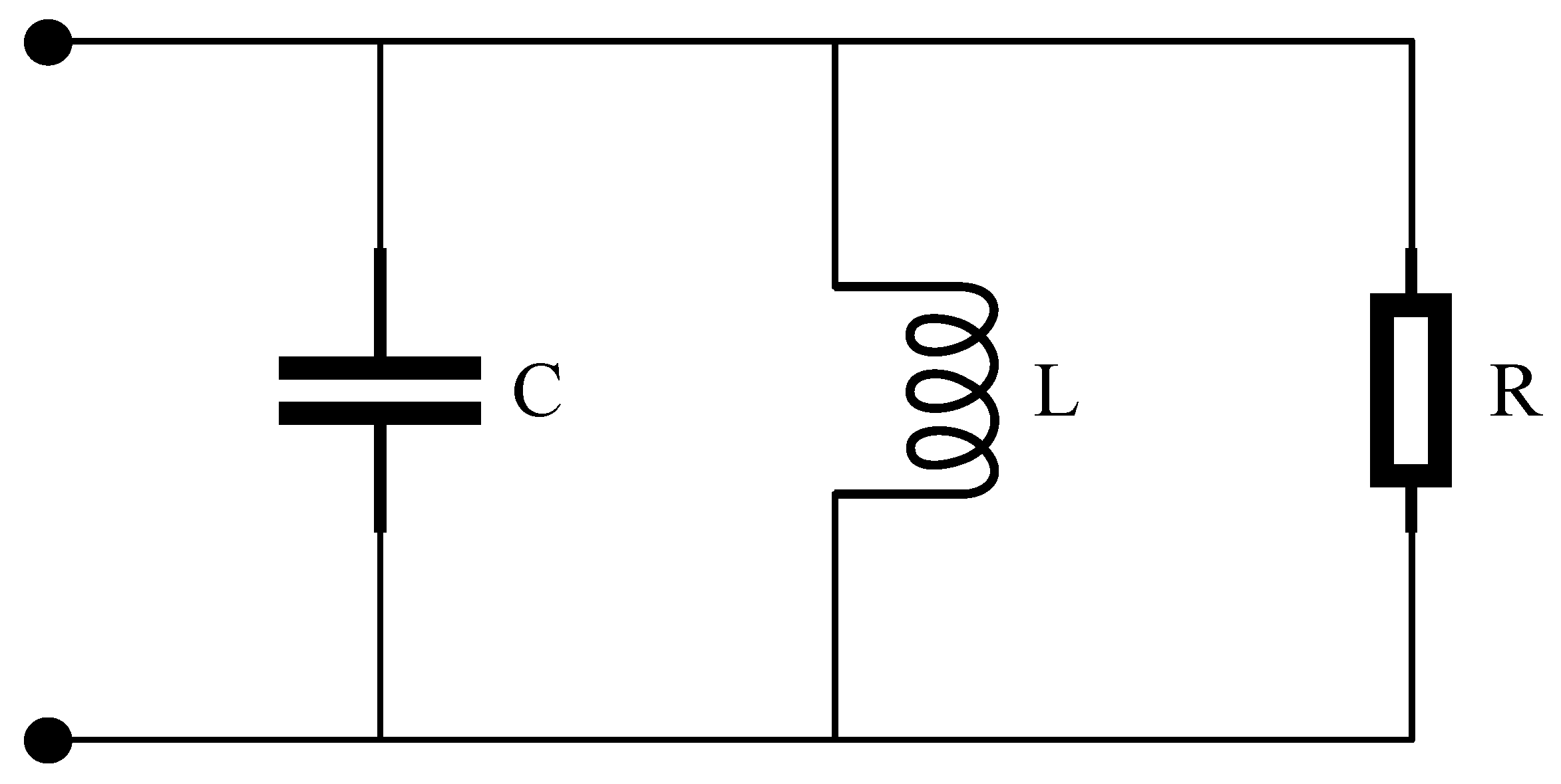
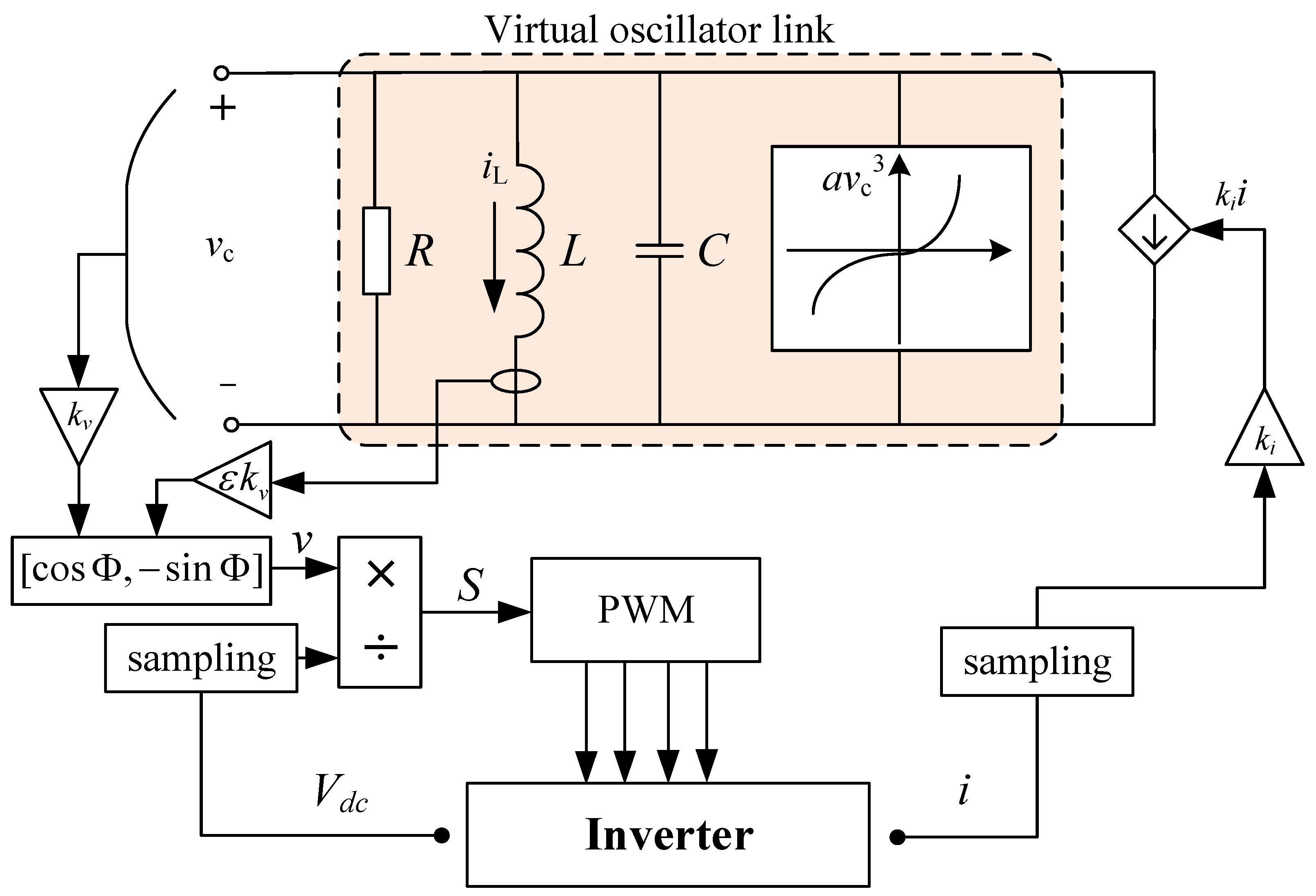
3.1. Characteristic Analysis of VOC Inverter
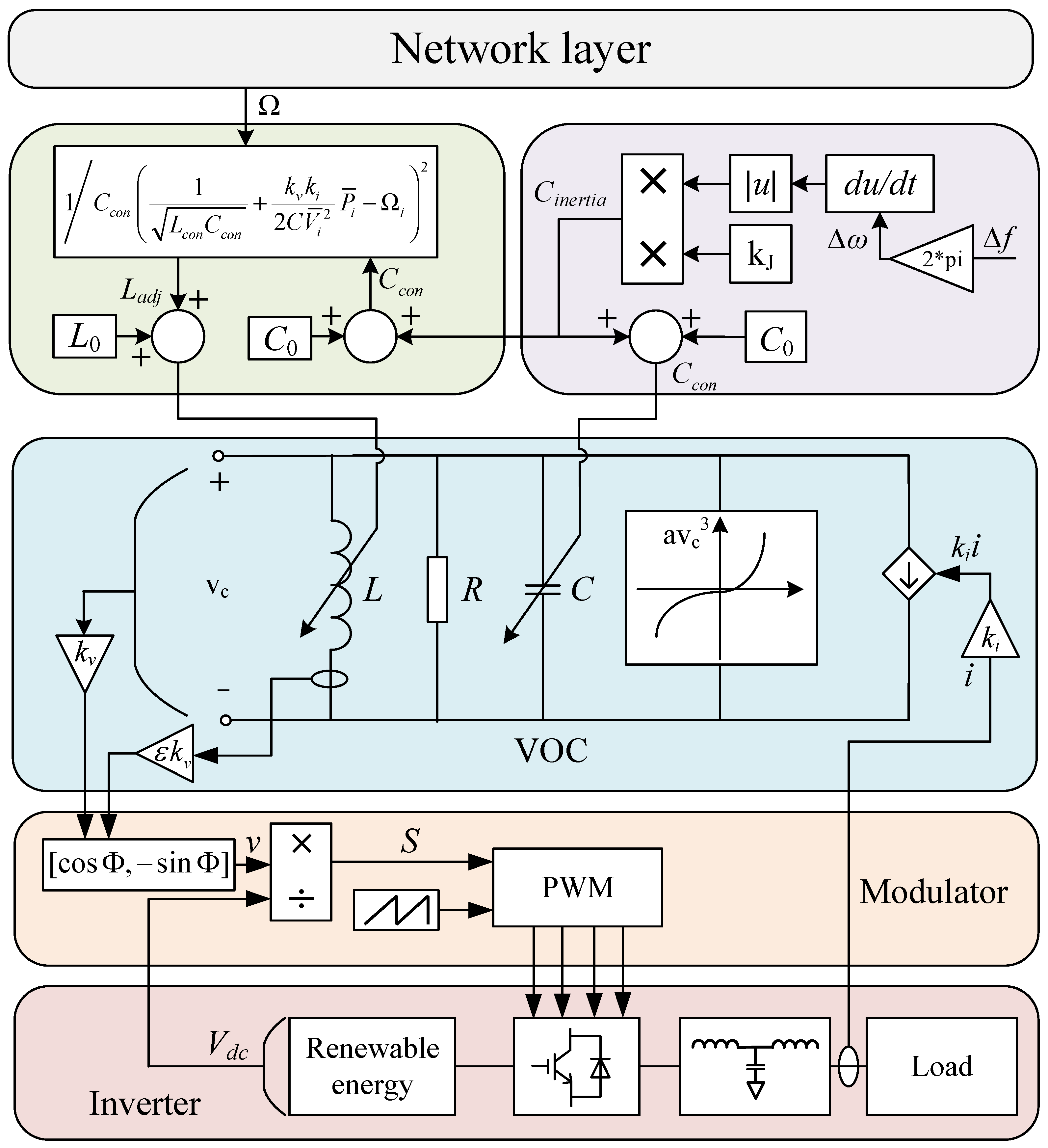
3.2. Control Method
3.2.1. Overall Framework
3.2.2. Determination of Virtual Capacitance
3.2.3. Determination of Virtual Inductor
4. Case Study
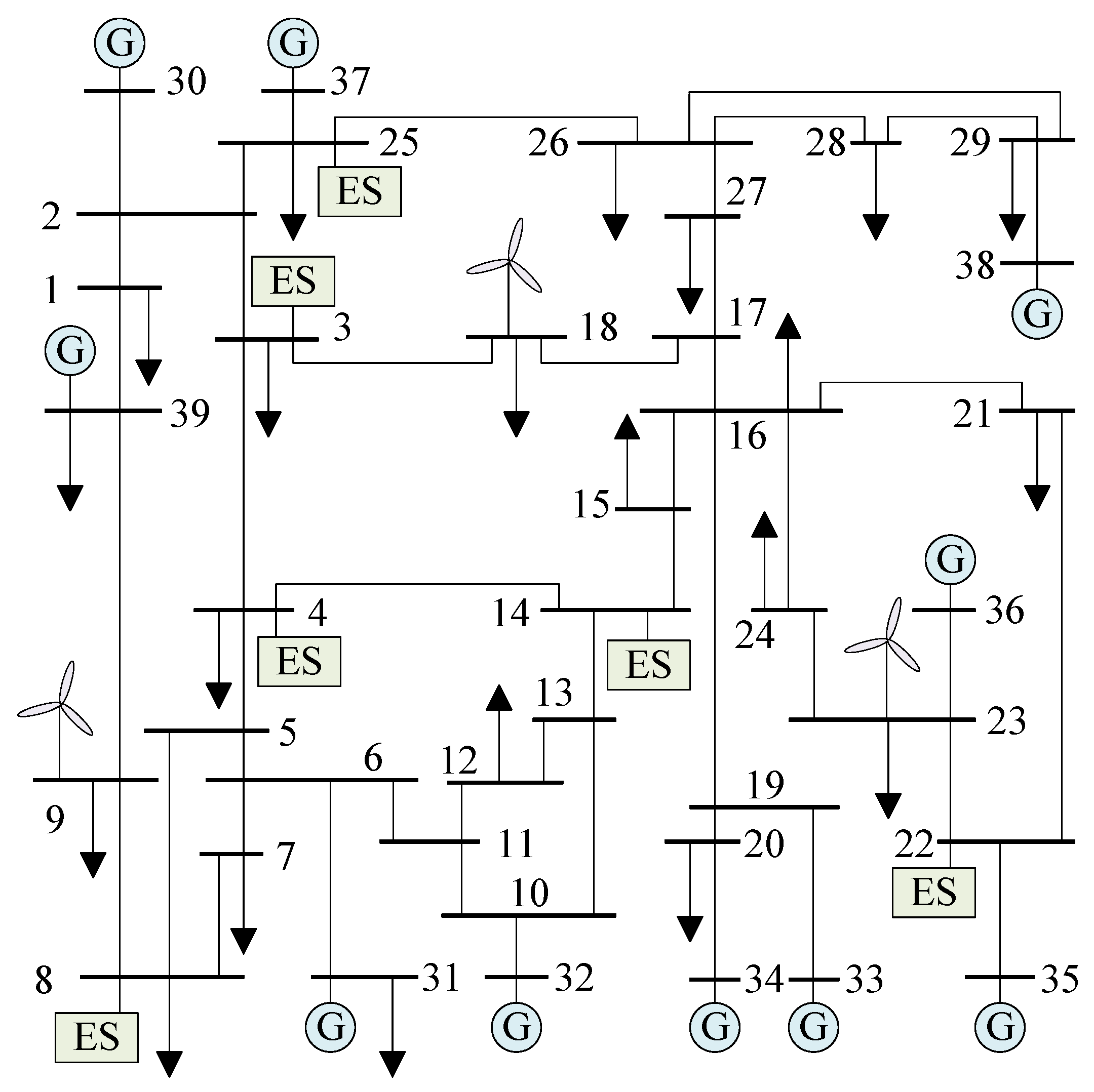
4.1. System Description
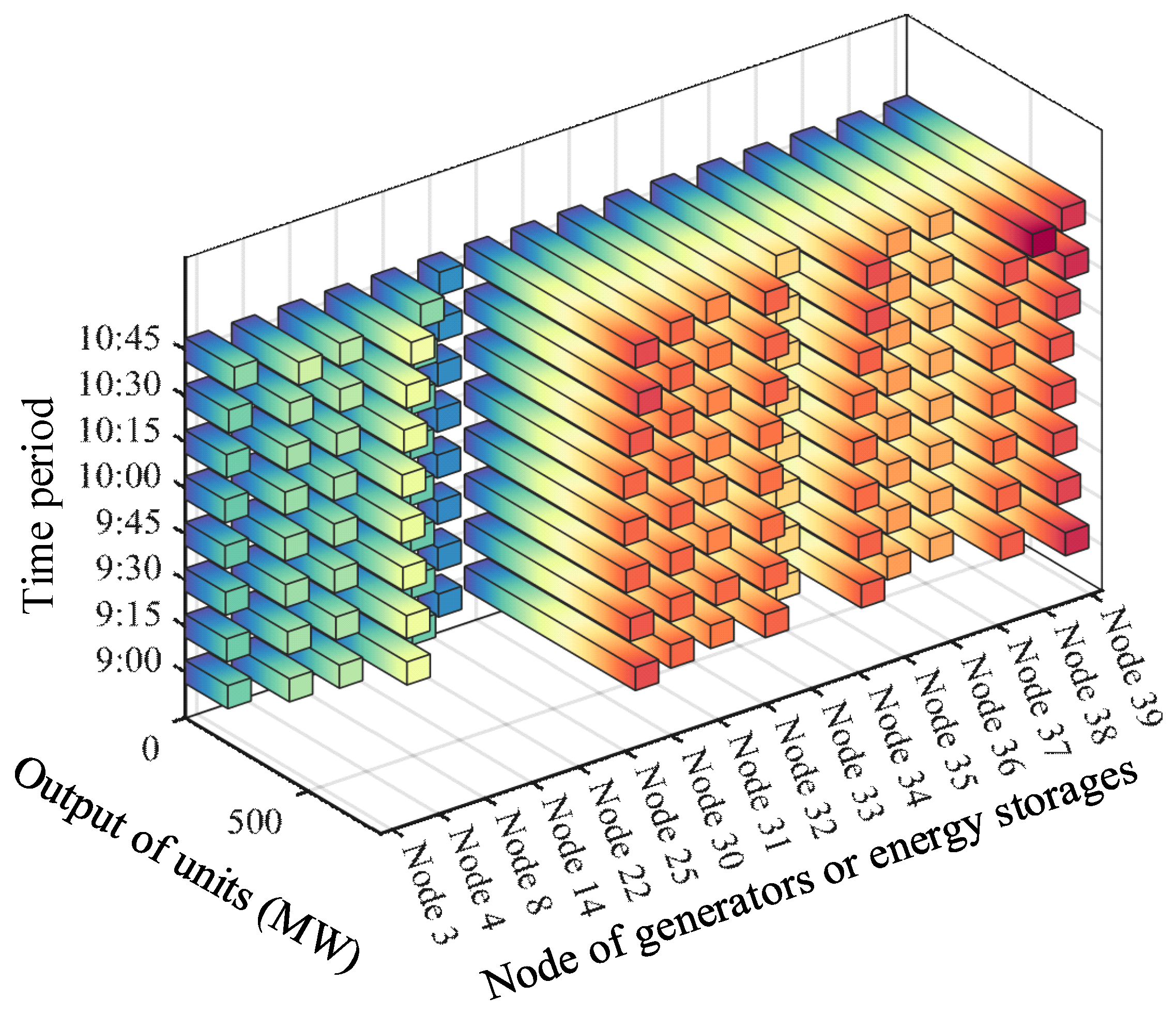
4.2. Verification of Upper-Level Preventive Control
- (1)
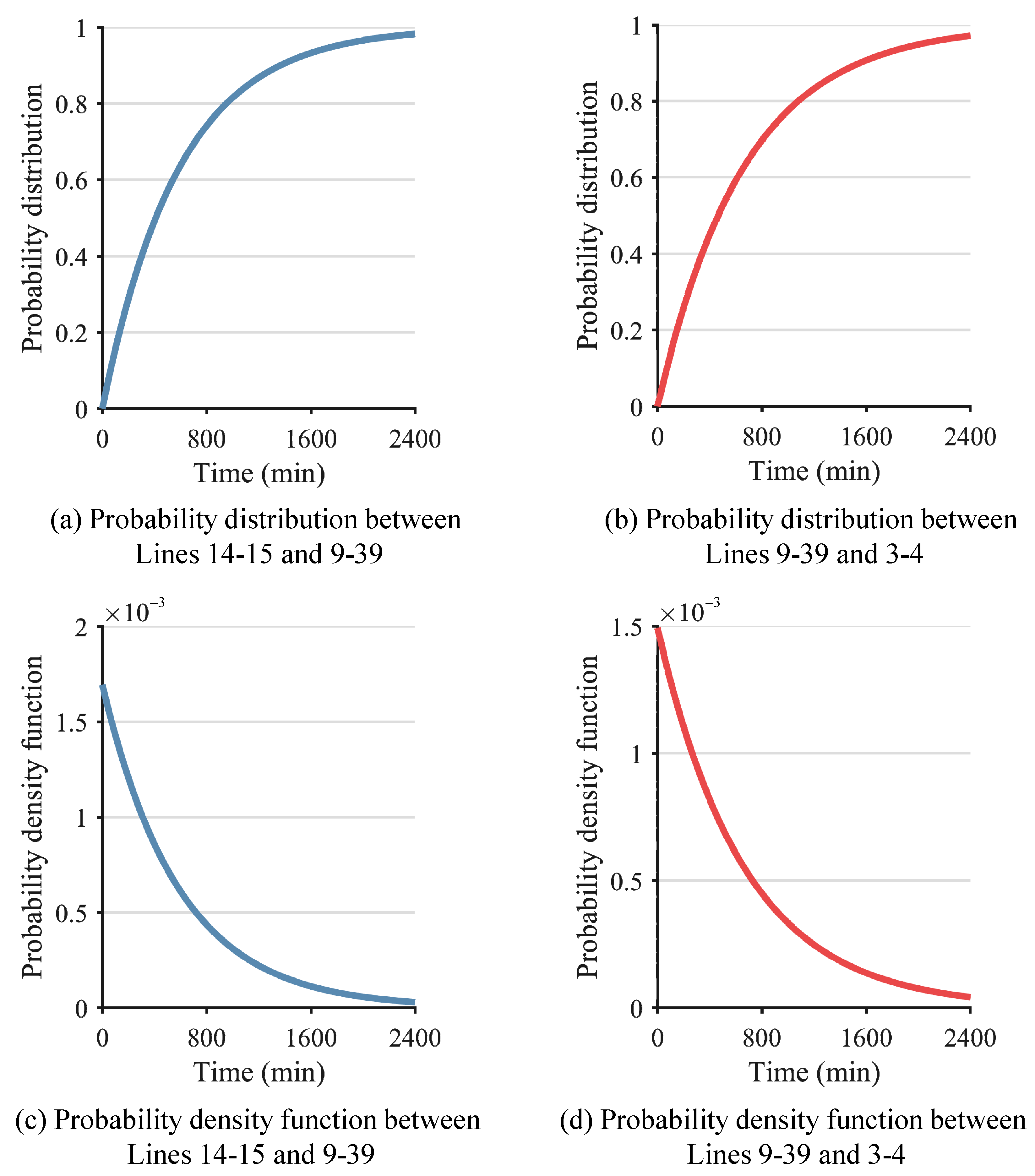
- At 9:28, Line 14–15 is broken and fails to reclose;
- (2)
- At 10:02, Line 9–39 is broken and fails to reclose;
- (3)
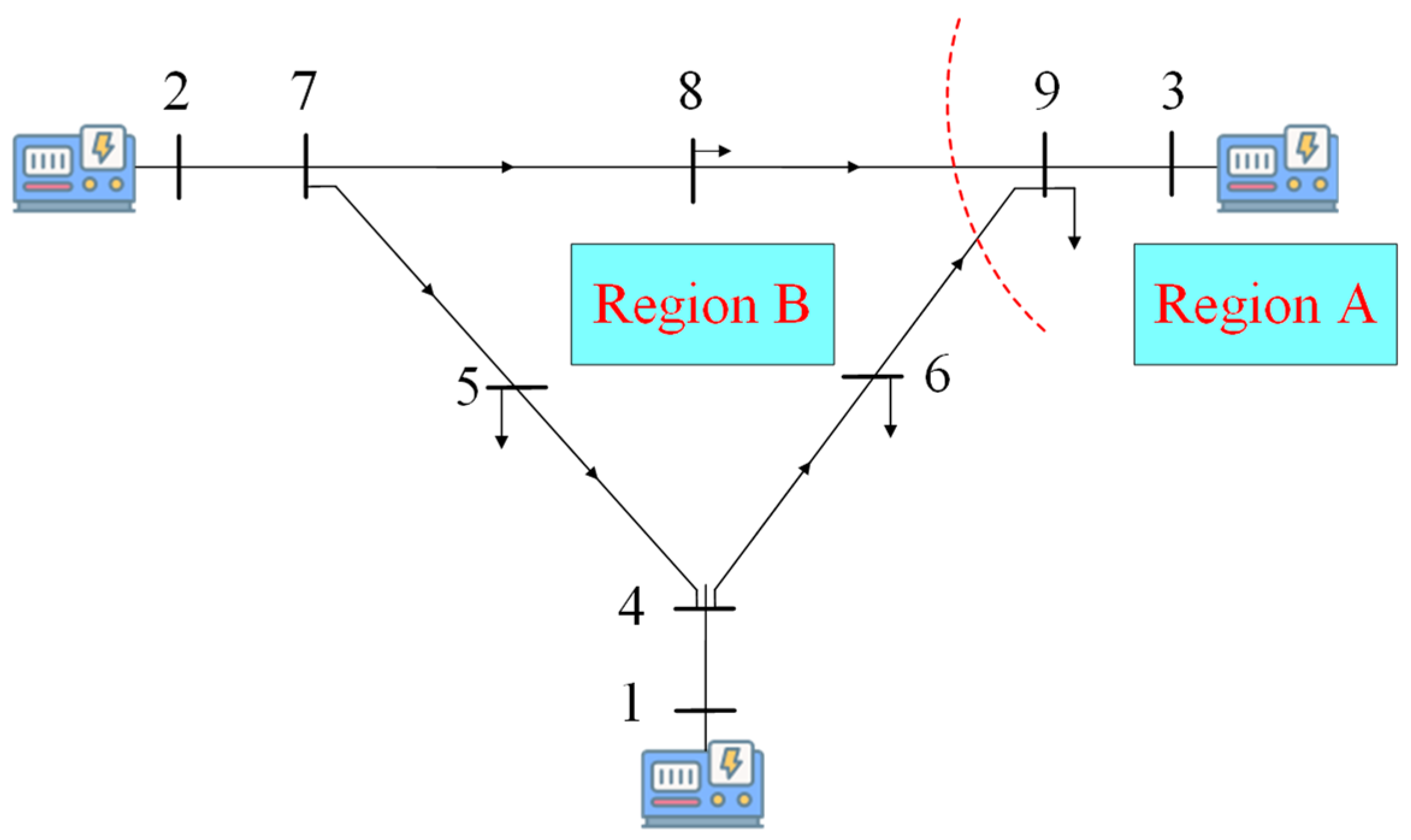
- At 10:42, Line 3–4 is broken and fails to reclose, and the whole power system is separated into two regions, as shown in Figure 8.

- (1)
- Data Collection: Gather historical data on line outages. These data should include the number of outages that occurred over a significant period, along with the duration of each observation period. It is essential to consider the specific weather conditions during which these outages occurred, as may vary with different environmental factors.
- (2)
- Calculating the Average Rate: Divide the total number of observed outages by the total observation time to calculate the average rate of outages per unit time. The formula for this calculation is as follows:
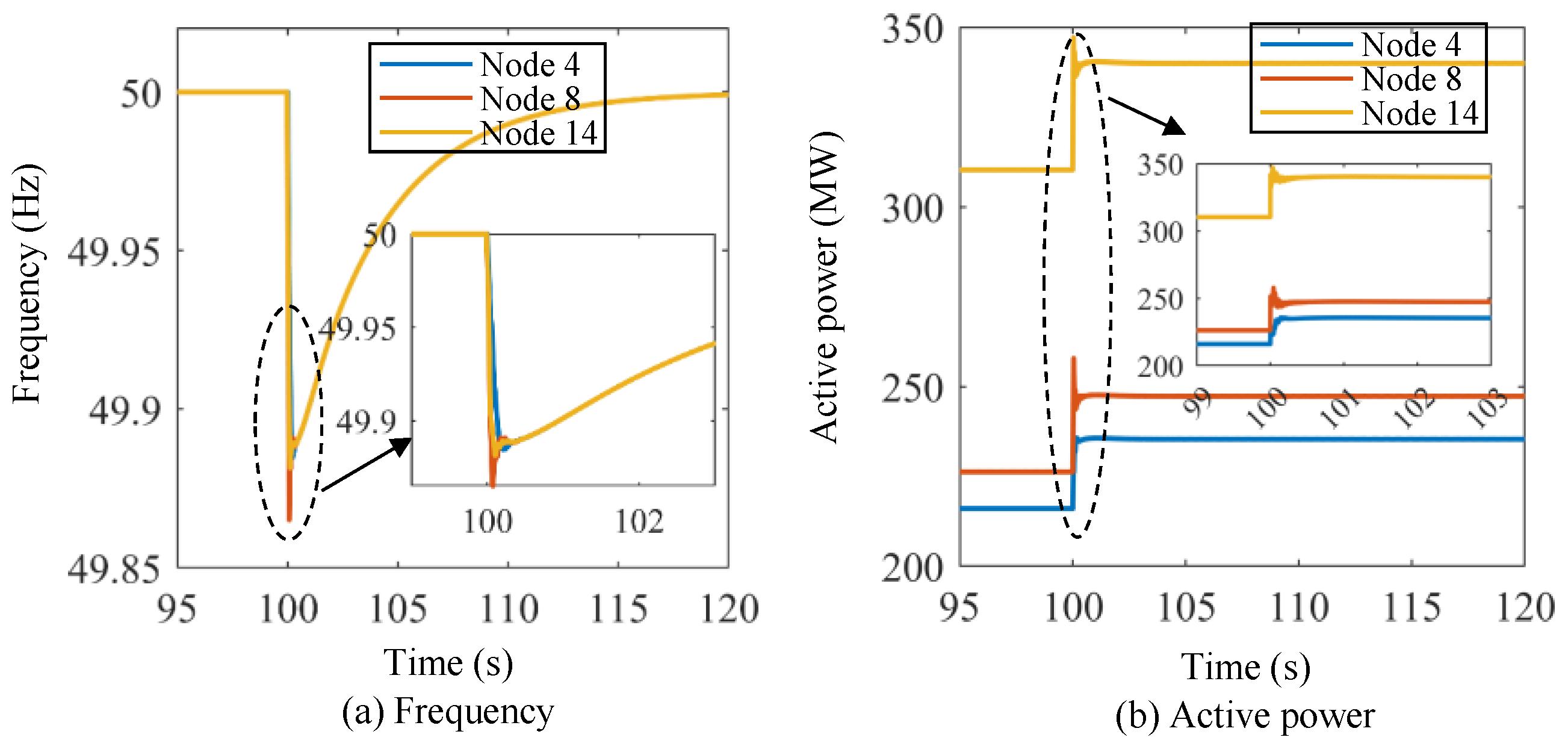
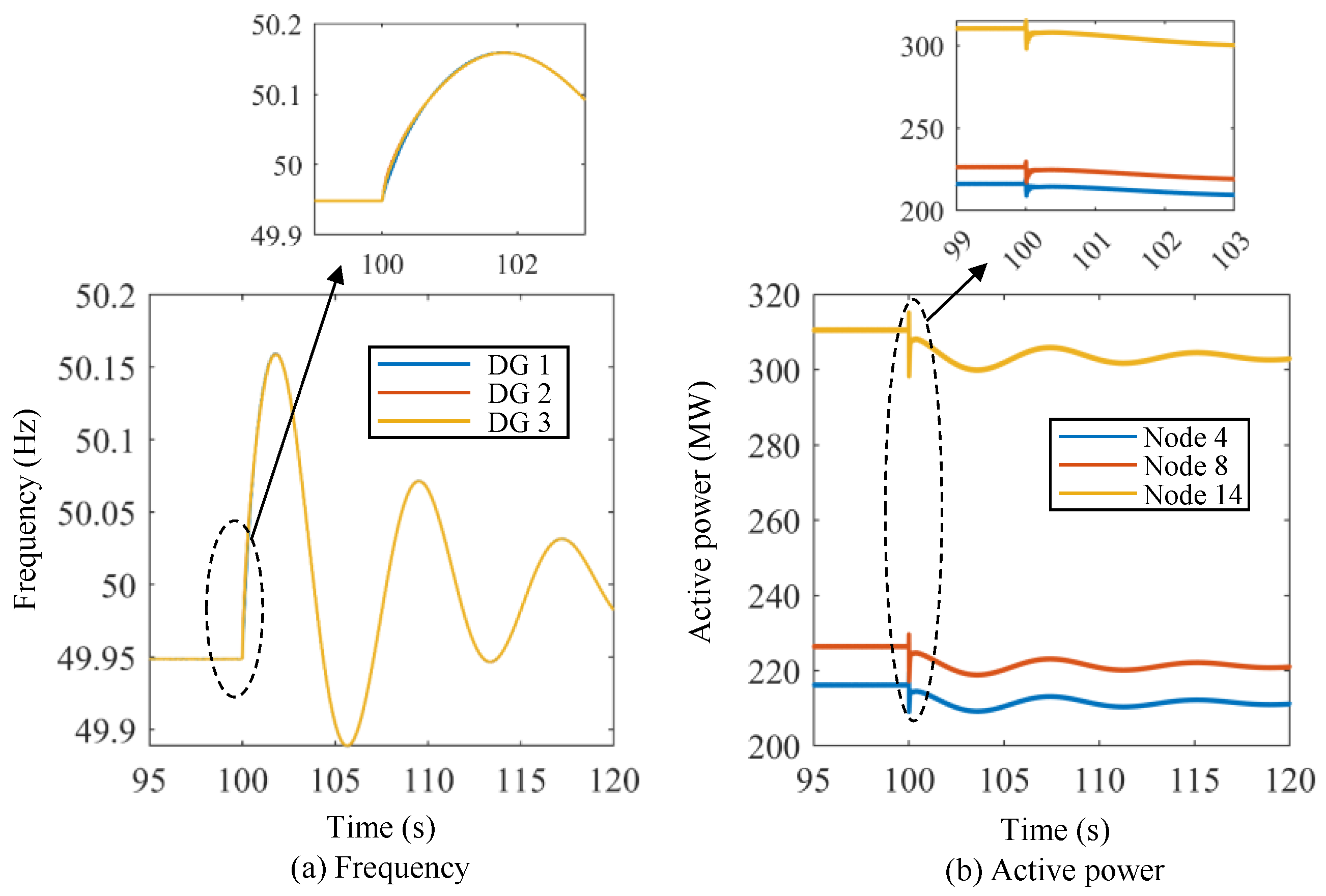
4.3. Verification of Virtual-Oscillator-Based Lower-Level Control
4.4. Comparison with Droop Control in Lower-Level Control
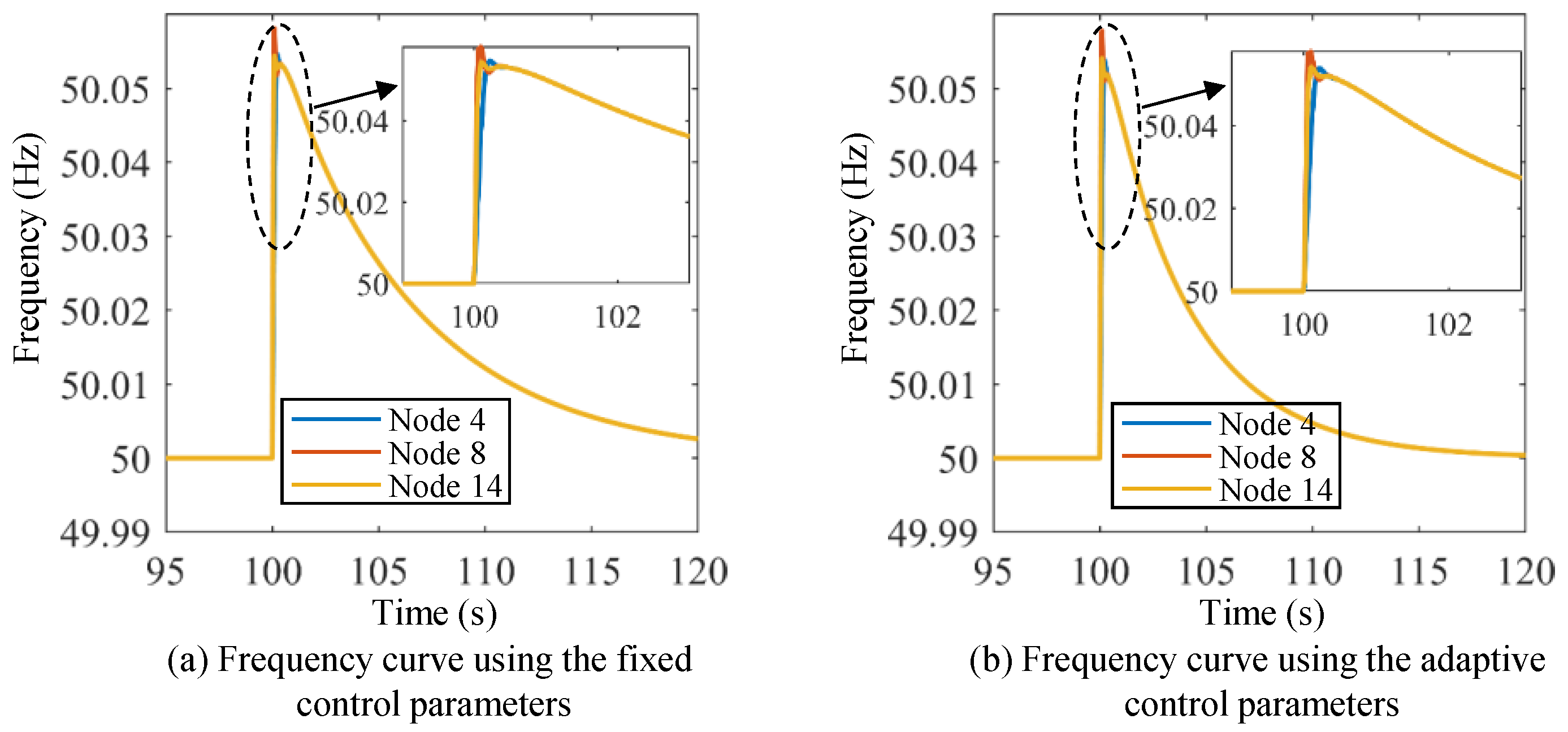
4.5. Influence of the Adaptive Control Parameters in Lower-Level Control
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Modeling of Successive Failures in Power Systems
Appendix B. The Influence of VOC Parameters on Transient Characteristics
References
- Han, J.; Lyu, W.; Song, H.; Qu, Y.; Wu, Z.; Zhang, X.; Li, Y.; Chen, Z. Optimization of Communication Network for Distributed Control of Wind Farm Equipped with Energy Storages. IEEE Trans. Sustain. Energy 2023, 14, 1933–1949. [Google Scholar] [CrossRef]
- Pan, W.; Li, Y. Improving Power Grid Resilience Under Extreme Weather Conditions With Proper Regulation and Management of DERs—Experiences Learned From the 2021 Texas Power Crisis. Front. Energy Res. 2022, 10, 921335. [Google Scholar] [CrossRef]
- Bie, Z.; Lin, Y.; Qiu, A. Concept and Research Prospects of Power System Resilience. Autom. Electr. Power Syst. 2015, 39, 1–9. [Google Scholar]
- Roege, P.E.; Collier, Z.A.; Mancillas, J.; McDonagh, J.A.; Linkov, I. Metrics for energy resilience. Energy Policy 2014, 72, 249–256. [Google Scholar] [CrossRef]
- Panteli, M.; Mancarella, P.; Trakas, D.N.; Kyriakides, E.; Hatziargyriou, N.D. Metrics and Quantification of Operational and Infrastructure Resilience in Power Systems. IEEE Trans. Power Syst. 2017, 32, 4732–4742. [Google Scholar] [CrossRef]
- Reed, D.A.; Kapur, K.C.; Christie, R.D. Methodology for Assessing the Resilience of Networked Infrastructure. IEEE Syst. J. 2009, 3, 174–180. [Google Scholar] [CrossRef]
- Mahzarnia, M.; Moghaddam, M.P.; Baboli, P.T.; Siano, P. A Review of the Measures to Enhance Power Systems Resilience. IEEE Syst. J. 2020, 14, 4059–4070. [Google Scholar] [CrossRef]
- Arjomandi-Nezhad, A.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M.; Safdarian, A.; Dehghanian, P.; Wang, F. Modeling and Optimizing Recovery Strategies for Power Distribution System Resilience. IEEE Syst. J. 2021, 15, 4725–4734. [Google Scholar] [CrossRef]
- Yan, M.; Ai, X.; Shahidehpour, M.; Li, Z.; Wen, J.; Bahramira, S.; Paaso, A. Enhancing the Transmission Grid Resilience in Ice Storms by Optimal Coordination of Power System Schedule with Pre-Positioning and Routing of Mobile DC DE-Icing Devices. IEEE Trans. Power Syst. 2019, 34, 2663–2674. [Google Scholar] [CrossRef]
- Noebels, M.; Quirós-Tortós, J.; Panteli, M. Decision-Making Under Uncertainty on Preventive Actions Boosting Power Grid Resilience. IEEE Syst. J. 2022, 16, 2614–2625. [Google Scholar] [CrossRef]
- Nazemi, M.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M.; Dehghanian, P. Energy Storage Planning for Enhanced Resilience of Power Distribution Networks Against Earthquakes. IEEE Trans. Sustain. Energy 2020, 11, 795–806. [Google Scholar] [CrossRef]
- Karim, M.A.; Currie, J.; Lie, T.T. Distributed Machine Learning on Dynamic Power System Data Features to Improve Resiliency for the Purpose of Self-Healing. Energies 2020, 13, 3494. [Google Scholar] [CrossRef]
- Kamruzzaman, M.; Duan, J.; Shi, D.; Benidris, M. A Deep Reinforcement Learning-based Multi-Agent Framework to Enhance Power System Resilience using Shunt Resources. IEEE Trans. Power Syst. 2021, 36, 5525–5536. [Google Scholar] [CrossRef]
- Musleh, A.S.; Khalid, H.M.; Muyeen, S.M.; Al-Durra, A. A Prediction Algorithm to Enhance Grid Resilience Toward Cyber Attacks in WAMCS Applications. IEEE Syst. J. 2019, 13, 710–719. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, L.; Shahidehpour, M.; Lai, L.L.; Yuan, H.; Xu, F.Y. Resilience-Constrained Hourly Unit Commitment in Electricity Grids. IEEE Trans. Power Syst. 2018, 33, 5604–5614. [Google Scholar] [CrossRef]
- Liu, X.; Shahidehpour, M.; Li, Z.; Liu, X.; Cao, Y.; Bie, Z. Microgrids for Enhancing the Power Grid Resilience in Extreme Conditions. IEEE Trans. Smart Grid 2017, 8, 589–597. [Google Scholar]
- Wang, F.; Chen, C.; Li, C.; Cao, Y.; Li, Y.; Zhou, B.; Dong, X. A Multi-Stage Restoration Method for Medium-Voltage Distribution System With DGs. IEEE Trans. Smart Grid 2017, 8, 2627–2636. [Google Scholar] [CrossRef]
- Dehghanian, P.; Aslan, S.; Dehghanian, P. Quantifying Power System Resilience Improvement Using Network Reconfiguration. In Proceedings of the IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 1558–3899. [Google Scholar]
- Huang, G.; Wang, J.; Chen, C.; Qi, J.; Guo, C. Integration of Preventive and Emergency Responses for Power Grid Resilience Enhancement. IEEE Trans. Power Syst. 2017, 32, 4451–4463. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, X.; Guo, J.; Shan, X.; Wang, Z.; Li, Z.; Tse, C.K. Integrating Reinforcement Learning and Optimal Power Dispatch to Enhance Power Grid Resilience. In IEEE Transactions on Circuits and Systems II: Express Briefs; IEEE: Piscataway, NJ, USA, 2021; Volume 69, pp. 1402–1406. [Google Scholar]
- Wei, X.; Liang, Y.; Guo, L.; Zhang, D.; Jia, Y. Research on fault location method of distribution network based on Lambda algorithm. Electr. Meas. Instrum. 2022, 59, 71–76. [Google Scholar]
- Duanmu, J.C.; Yuan, Y. Calculation method of outage probability of distribution network based on real-time failure rate of equipment. Electr. Meas. Instrum. 2023, 60, 26–32. [Google Scholar]
- Zhang, L.; Dou, X.; Zhao, W.; Hu, M. Islanding detection for active distribution network considering demand response. Electr. Meas. Instrum. 2019, 56, 63–68; 75. [Google Scholar]
- Lu, M.; Dhople, S.; Johnson, B. Benchmarking Nonlinear Oscillators for Grid-Forming Inverter Control. IEEE Trans. Power Electron. 2022, 37, 10250–10266. [Google Scholar] [CrossRef]
- Lu, M. Virtual Oscillator Grid-Forming Inverters: State of the Art, Modeling, and Stability. IEEE Trans. Power Electron. 2022, 37, 11579–11591. [Google Scholar] [CrossRef]
- Nguyen, N.; Almasabi, S.; Bera, A.; Mitra, J. Optimal power flow incorporating frequency security constraint. IEEE Trans. Ind. Appl. 2019, 55, 6508–6516. [Google Scholar] [CrossRef]
- Hao, Z.; Guo, G.; Huang, H. A Particle Swarm Optimization Algorithm with Differential Evolution. In Proceedings of the 2007 International Conference on Machine Learning and Cybernetics, Hong Kong, China, 19–22 August 2007; pp. 1031–1035. [Google Scholar] [CrossRef]
- Mazumder, S.K.; Greidanus, M.D.R.; Liu, J.; Mantooth, H.A. Vulnerability of a VOC-Based Inverter Due to Noise Injection and Its Mitigation. IEEE Trans. Power Electron. 2022, 38, 1445–1450. [Google Scholar] [CrossRef]
- Johnson, B.B.; Sinha, M.; Ainsworth, N.G.; Dorfler, F.; Dhople, S.V. Synthesizing virtual oscillators to control islanded inverters. IEEE Trans. Power Electron. 2015, 31, 6002–6015. [Google Scholar] [CrossRef]
- Wang, J.; Heydt, G.T. Application of Poisson models to electric power system reliability evaluation. IEEE Trans. Power Syst. 2006, 21, 1493–1500. [Google Scholar]
- Hu, Y.; Wang, W.; Liu, Y. Short-term load forecasting using a hybrid model based on Poisson regression and artificial neural network. Appl. Energy 2017, 185, 1491–1500. [Google Scholar]
- Zhang, Z.; Cui, W.; Niu, S.; Wang, C.; Xue, C.; Ma, X.; Liu, S.; Bie, Z. Preventive control of successive failures in extreme weather for power system resilience enhancement. IET Gener. Transm. Distrib. 2022, 16, 3245–3255. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Parameter Name and Unit | Value | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Node 30 | Node 31 | Node 32 | Node 33 | Node 34 | Node 35 | Node 36 | Node 37 | Node 38 | Node 39 | ||
| Upper limit of active power (MW) | 1040 | 646 | 725 | 652 | 508 | 687 | 580 | 564 | 865 | 1100 | |
| Lower limit of active power (MW) | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Upper limit of reactive power (Mvar) | 400 | 300 | 300 | 250 | 167 | 300 | 240 | 250 | 300 | 300 | |
| Lower limit of reactive power (Mvar) | 140 | −100 | 150 | 0 | 0 | −100 | 0 | 0 | −150 | −100 | |
| Parameter Symbol | Parameter Name and Unit | Value | ||
|---|---|---|---|---|
| Node 9 | Node 18 | Node 23 | ||
| Capacity (MW) | 500 | 400 | 450 | |
| Scale factor | 10.7 | 8.7 | 10 | |
| Lf | Shape factor | 3.97 | 4.7 | 4.2 |
| Lg | Cut-in wind speed (m/s) | 3.5 | 3.5 | 3.5 |
| Cf | Rated wind speed (m/s) | 15 | 15 | 15 |
| Cut-out wind speed (m/s) | 25 | 25 | 25 | |
| Parameter Symbol | Parameter Name and Unit | Value | |||||
|---|---|---|---|---|---|---|---|
| Node 3 | Node 4 | Node 8 | Node 14 | Node 22 | Node 25 | ||
| Rated active power (MW) | 200 | 300 | 250 | 350 | 200 | 100 | |
| Rated reactive power (Mvar) | 20 | 30 | 25 | 35 | 20 | 10 | |
| Lf | (μH) | 300 | 240 | 400 | 300 | 240 | 400 |
| Lg | (μH) | 300 | 240 | 400 | 300 | 240 | 400 |
| Cf | (μF) | 20 | 20 | 20 | 20 | 20 | 20 |
| Rd | (Ω) | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 |
| Rated angular velocity (rad/s) | |||||||
| Maximum angular velocity offset (rad/s) | |||||||
| Parameter Symbol | Parameter Name | Value | Unit |
|---|---|---|---|
| Voltage proportionality factor | 110 | - | |
| Negative impedance | 5.0868 | Ω−1 | |
| Cubic current source coefficient | 3.414 | A/V3 | |
| L0 | 58.9 | μH | |
| C0 | 119.3 | mF | |
| The first current scaling factor | 0.152 | - | |
| The second current scaling factor | 0.304 | - | |
| The third current scaling coefficient | 0.456 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhang, D.; Han, J.; Tian, C.; Xie, L.; Wang, C.; Fang, Z.; Li, L.; Zhang, G. A Multi-Level Operation Method for Improving the Resilience of Power Systems under Extreme Weather through Preventive Control and a Virtual Oscillator. Sensors 2024, 24, 1812. https://doi.org/10.3390/s24061812
Li C, Zhang D, Han J, Tian C, Xie L, Wang C, Fang Z, Li L, Zhang G. A Multi-Level Operation Method for Improving the Resilience of Power Systems under Extreme Weather through Preventive Control and a Virtual Oscillator. Sensors. 2024; 24(6):1812. https://doi.org/10.3390/s24061812
Chicago/Turabian StyleLi, Chenghao, Di Zhang, Ji Han, Chunsun Tian, Longjie Xie, Chenxia Wang, Zhou Fang, Li Li, and Guanyu Zhang. 2024. "A Multi-Level Operation Method for Improving the Resilience of Power Systems under Extreme Weather through Preventive Control and a Virtual Oscillator" Sensors 24, no. 6: 1812. https://doi.org/10.3390/s24061812
APA StyleLi, C., Zhang, D., Han, J., Tian, C., Xie, L., Wang, C., Fang, Z., Li, L., & Zhang, G. (2024). A Multi-Level Operation Method for Improving the Resilience of Power Systems under Extreme Weather through Preventive Control and a Virtual Oscillator. Sensors, 24(6), 1812. https://doi.org/10.3390/s24061812