
Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array
 , , , , and
, , , , and
Abstract
1. Introduction
2. Design and Fabrication
2.1. Fabrication
- 1.
- A thin soft layer (layer A) is created by pouring the silicone rubber in mould A.
- 2.
- Soft layer A is inlaid in mould B, and the flexible PCB is then placed on top of layer A, by folding the sections between electrodes, and by press-fitting these into the holes of mould B. This step ensures that the flexible PCB maintains its compressed configuration during fabrication.
- 3.
- The rear of the flexible PCB is then covered by a layer of fabric which is held in place by mould C. Mould B and C are aligned with indexing pins and tightly held in place using clips.
- 4.
- The silicone rubber is poured evenly on top of the fabric and is allowed to seep in through the same and the gaps within the folds of the flexible PCB and the moulds.
- 5.
- Post-curing, the entire stretchable array can be removed as a single unit. Fastening, such as Velcro straps, press-buttons, etc., can be provisioned either on the cured rubber or the excess fabric to allow it to be fastened around the arm.
2.2. Materials and Component Choices
2.2.1. Electrodes
2.2.2. The Flexible PCB Grid
2.2.3. Silicone Rubber Substrate and Fabric Reinforcement
3. Characterisation Experimental Methods
3.1. Baseline Noise Characterisation
3.2. Electrochemical Characterization of Electrode Sites
4. Validation Experimental Methods
4.1. EMG Model
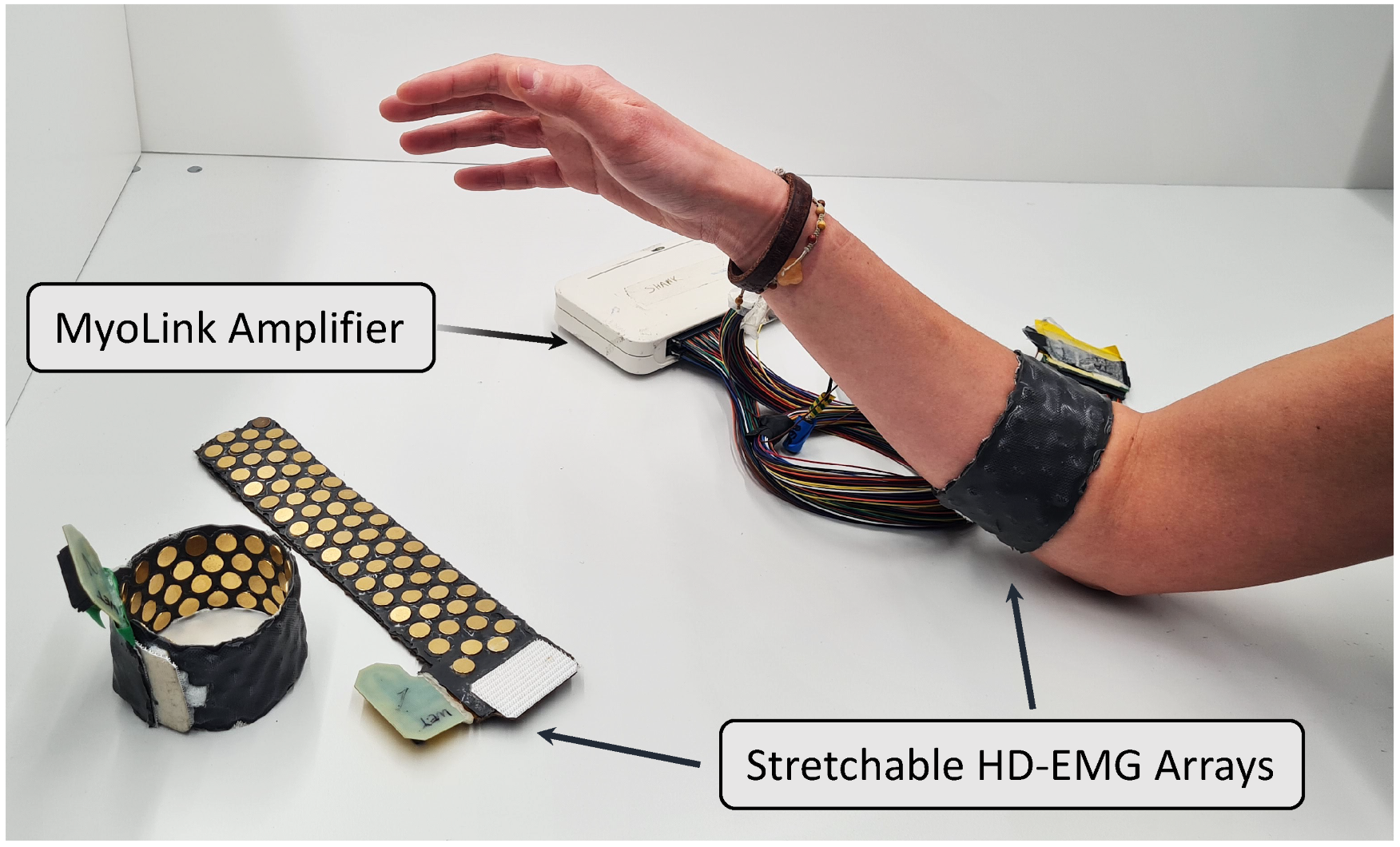
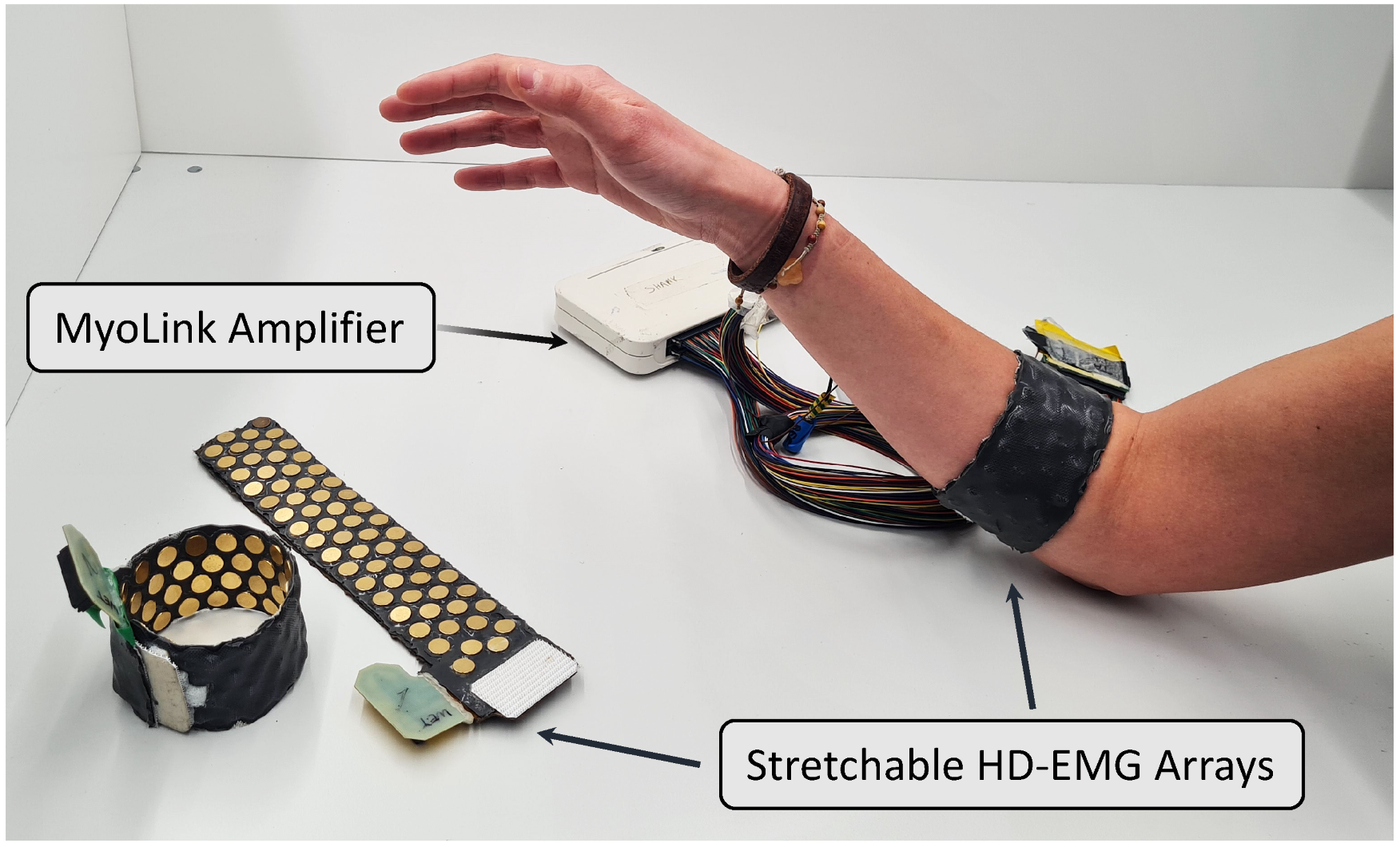
4.2. Data Acquisition
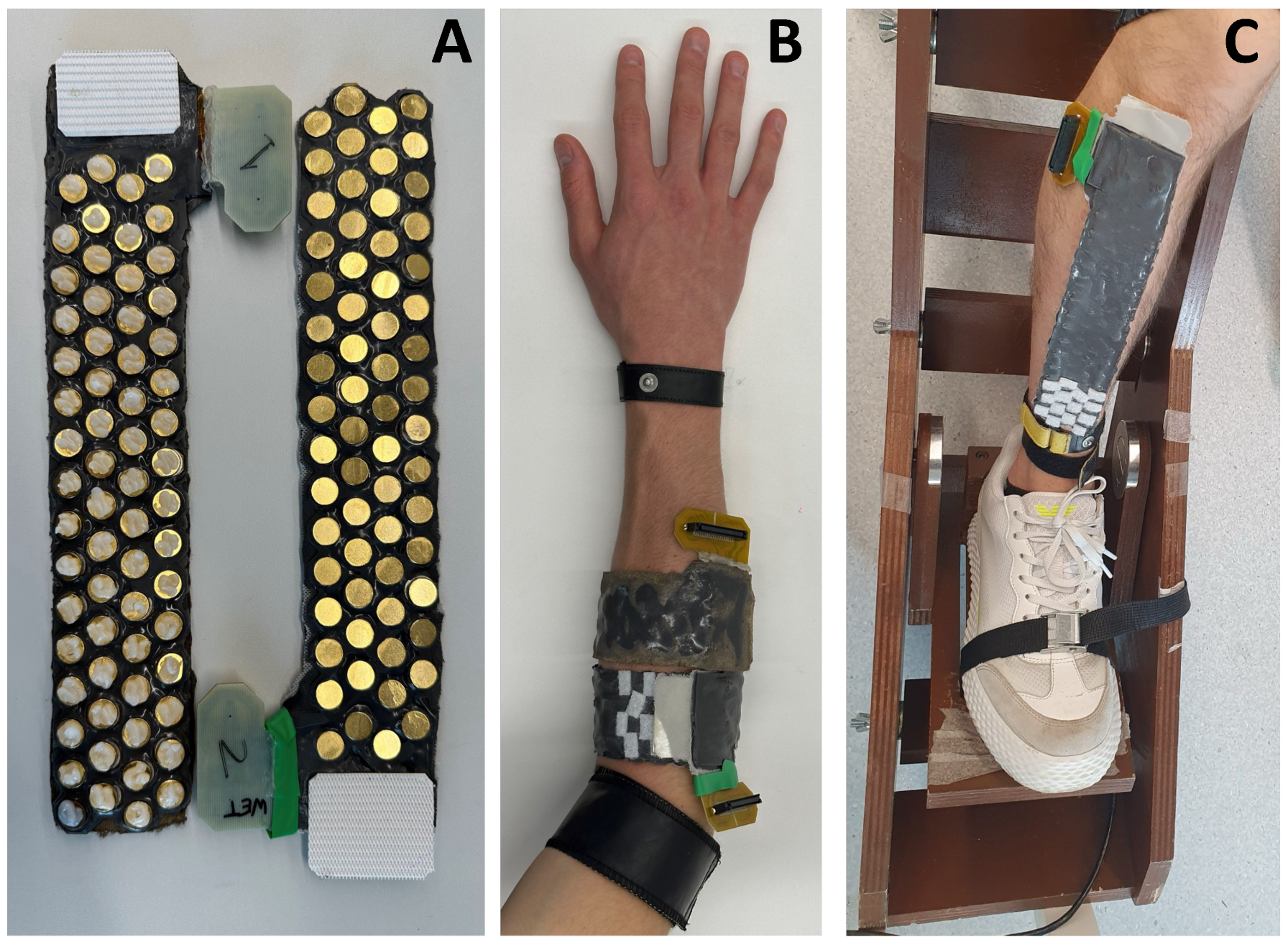
4.2.1. Recording Forearm EMG During Gestures
4.2.2. Recording TA EMG during Isometric Contraction
4.3. Model Architecture and Parameters
4.4. Decomposition
5. Results
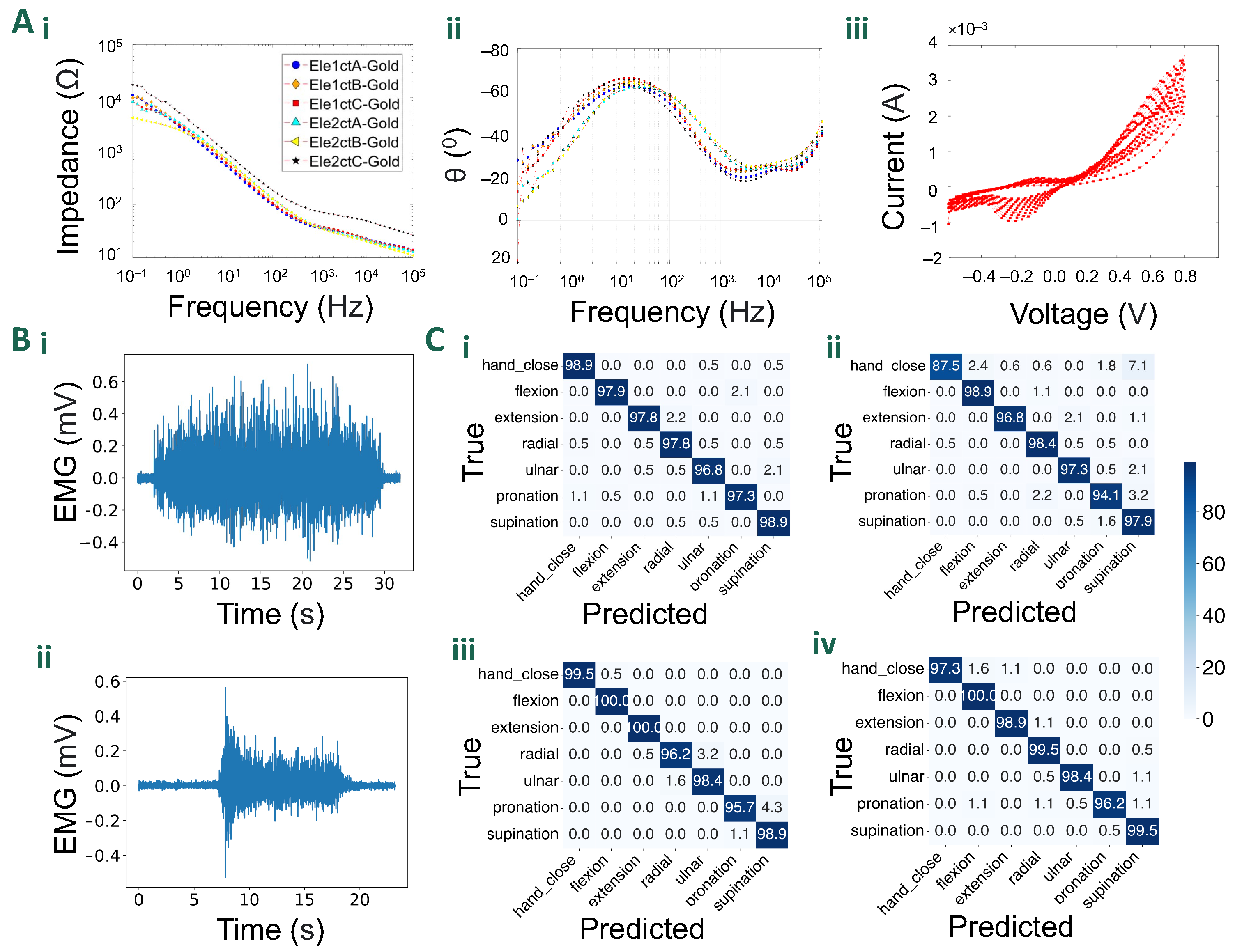
5.1. Baseline Noise Characterisation
5.2. Electrochemical Characterisation
5.3. Experimental Validation
5.3.1. Gesture Classification
5.3.2. Decomposition
6. Discussion
6.1. Grid Design
6.2. Gesture Classification
6.3. Decomposition
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EMG | Electromyography |
| HD | High-Density |
| MN | Motor Neuron |
| MU | Motor Unit |
| MUAP | Motor unit action potential |
| MVC | Maximal Voluntary Contraction |
| BSS | Blind Source Separation |
| HMI | Human–Machine Interfaces |
| DOF | Degrees of Freedom |
| DIY | Do-It-Yourself |
| FES | Functional Electrical Stimulation |
| IMU | Inertial Measurement Unit |
| ENIG | Electroless-Nickel-Immersion-Gold |
| RMS | Root Mean Square |
| PCB | Printed Circuit Board |
| EIS | Electrochemical impedance spectroscopy |
| CV | Cyclic Voltammetry |
| WE | Working electrode |
| CE | Counter electrode |
| RE | Reference electrode |
| TA | Tibialis Anterior |
| AI | Artificial Intelligence |
| ML | Machine Learning |
| CNN | Convolutional Neural Network |
| ReLU | Rectified Linear Unit |
| CoV | Coefficient of Variation |
| SIL | Silhouette |
| ICREC | Imperial College Research Ethics Committee |
References
- Ramírez-Jarquín, U.N.; Tapia, R. Excitatory and inhibitory neuronal circuits in the spinal cord and their role in the control of motor neuron function and degeneration. ACS Chem. Neurosci. 2018, 9, 211–216. [Google Scholar] [CrossRef]
- Asghar, A.; Khan, S.J.; Azim, F.; Shakeel, C.S.; Hussain, A.; Niazi, I.K. Review on electromyography based intention for upper limb control using pattern recognition for human-machine interaction. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2022, 236, 628–645. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Xiong, A. Advances and Disturbances in sEMG-Based Intentions and Movements Recognition: A Review. IEEE Sens. J. 2021, 21, 13019–13028. [Google Scholar] [CrossRef]
- Bi, L.; Feleke, A.G.; Guan, C. A review on EMG-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomed. Signal Process. Control. 2019, 51, 113–127. [Google Scholar] [CrossRef]
- Zheng, M.; Crouch, M.S.; Eggleston, M.S. Surface Electromyography as a Natural Human–Machine Interface: A Review. IEEE Sens. J. 2022, 22, 9198–9214. [Google Scholar] [CrossRef]
- Azhiri, R.B.; Esmaeili, M.; Nourani, M. Emg-based feature extraction and classification for prosthetic hand control. arXiv 2021, arXiv:2107.00733. [Google Scholar]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature extraction and selection for myoelectric control based on wearable EMG sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef]
- Ciancio, A.L.; Cordella, F.; Barone, R.; Romeo, R.A.; Bellingegni, A.D.; Sacchetti, R.; Davalli, A.; Di Pino, G.; Ranieri, F.; Di Lazzaro, V.; et al. Control of prosthetic hands via the peripheral nervous system. Front. Neurosci. 2016, 10, 116. [Google Scholar] [CrossRef]
- Eden, J.; Bräcklein, M.; Pereda, J.I.; Barsakcioglu, D.Y.; Di Pino, G.; Farina, D.; Burdet, E.; Mehring, C. Human movement augmentation and how to make it a reality. arXiv 2021, arXiv:2106.08129. [Google Scholar]
- Roland, T. Motion artifact suppression for insulated EMG to control myoelectric prostheses. Sensors 2020, 20, 1031. [Google Scholar] [CrossRef]
- Sarasola-Sanz, A.; López-Larraz, E.; Irastorza-Landa, N.; Rossi, G.; Figueiredo, T.; McIntyre, J.; Ramos-Murguialday, A. Real-Time Control of a Multi-Degree-of-Freedom Mirror Myoelectric Interface During Functional Task Training. Front. Neurosci. 2022, 16, 764936. [Google Scholar] [CrossRef] [PubMed]
- Shih, J.J.; Krusienski, D.J.; Wolpaw, J.R. Brain-computer interfaces in medicine. Mayo Clin. Proc. 2012, 87, 268–279. [Google Scholar] [CrossRef]
- Searle, A.; Kirkup, L. A direct comparison of wet, dry and insulating bioelectric recording electrodes. Physiol. Meas. 2000, 21, 271. [Google Scholar] [CrossRef] [PubMed]
- Jamal, M.Z. Signal acquisition using surface EMG and circuit design considerations for robotic prosthesis. Comput. Intell. Electromyogr. Anal.-A Perspect. Curr. Appl. Future Challenges 2012, 18, 427–448. [Google Scholar]
- Wu, H.; Yang, G.; Zhu, K.; Liu, S.; Guo, W.; Jiang, Z.; Li, Z. Materials, devices, and systems of on-skin electrodes for electrophysiological monitoring and human–machine interfaces. Adv. Sci. 2021, 8, 2001938. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Zhao, J.; Dong, Y.; Wang, X. Dry Electrodes for Human Bioelectrical Signal Monitoring. Sensors 2020, 20, 3651. [Google Scholar] [CrossRef] [PubMed]
- Yamagami, M.; Peters, K.M.; Milovanovic, I.; Kuang, I.; Yang, Z.; Lu, N.; Steele, K.M. Assessment of dry epidermal electrodes for long-term electromyography measurements. Sensors 2018, 18, 1269. [Google Scholar] [CrossRef]
- Ting, J.E.; Del Vecchio, A.; Sarma, D.; Verma, N.; Colachis 4th, S.C.; Annetta, N.V.; Collinger, J.L.; Farina, D.; Weber, D.J. Sensing and decoding the neural drive to paralyzed muscles during attempted movements of a person with tetraplegia using a sleeve array. J. Neurophysiol. 2021, 126, 2104–2118. [Google Scholar] [CrossRef]
- Koutsoftidis, S.; Barsakcioglu, D.Y.; Petkos, K.; Farina, D.; Drakakis, E. Myolink: A 128-Channel, 18nV/Hz, Embedded Recording System, Optimized for High-Density Surface Electromyogram Acquisition. IEEE Trans. Biomed. Eng. 2022, 69, 3389–3396. [Google Scholar] [CrossRef]
- Laferriere, P.; Lemaire, E.D.; Chan, A.D. Surface electromyographic signals using dry electrodes. IEEE Trans. Instrum. Meas. 2011, 60, 3259–3268. [Google Scholar] [CrossRef]
- Li, J.; Wang, P.; Huang, H.J. Dry epidermal electrodes can provide long-term high fidelity electromyography for limited dynamic lower limb movements. Sensors 2020, 20, 4848. [Google Scholar] [CrossRef] [PubMed]
- Young, A.J.; Hargrove, L.J.; Kuiken, T.A. The Effects of Electrode Size and Orientation on the Sensitivity of Myoelectric Pattern Recognition Systems to Electrode Shift. IEEE Trans. Biomed. Eng. 2011, 58, 2537–2544. [Google Scholar] [CrossRef] [PubMed]
- Shaw, L.; Bhaga, S. Online EMG Signal Analysis for diagnosis of Neuromuscular diseases by using PCA and PNN. Int. J. Eng. Sci. Technol. 2012, 4, 4453–4459. [Google Scholar]
- Magar, H.S.; Hassan, R.Y.A.; Mulchandani, A. Electrochemical Impedance Spectroscopy (EIS): Principles, Construction, and Biosensing Applications. Sensors 2021, 21, 6578. [Google Scholar] [CrossRef] [PubMed]
- Kissinger, P.T.; Heineman, W.R. Cyclic voltammetry. J. Chem. Educ. 1983, 60, 702. [Google Scholar] [CrossRef]
- Steins, H.; Mierzejewski, M.; Brauns, L.; Stumpf, A.; Kohler, A.; Heusel, G.; Corna, A.; Herrmann, T.; Jones, P.D.; Zeck, G.; et al. A flexible protruding microelectrode array for neural interfacing in bioelectronic medicine. Microsystems Nanoeng. 2022, 8, 131. [Google Scholar] [CrossRef]
- Farina, D.; Merletti, R.; Enoka, R.M. The extraction of neural strategies from the surface EMG. J. Appl. Physiol. 2004, 96, 1486–1495. [Google Scholar] [CrossRef]
- Mills, K.R. The basics of electromyography. J. Neurol. Neurosurg. Psychiatry 2005, 76, ii32–ii35. [Google Scholar] [CrossRef]
- Holobar, A.; Zazula, D. Correlation-based decomposition of surface electromyograms at low contraction forces. Med. Biol. Eng. Comput. 2004, 42, 487–495. [Google Scholar] [CrossRef]
- Pal, M.; Roy, R.; Basu, J.; Bepari, M.S. Blind source separation: A review and analysis. In Proceedings of the 2013 International Conference Oriental COCOSDA Held Jointly with 2013 Conference on Asian Spoken Language Research and Evaluation (O-COCOSDA/CASLRE), Gurgaon, India, 25–27 November 2013. [Google Scholar] [CrossRef]
- Avrillon, S.; Hug, F.; Gibbs, C.; Farina, D. Tutorial on MUedit: An open-source software for identifying and analysing the discharge timing of motor units from electromyographic signals. bioRxiv 2023. [Google Scholar] [CrossRef]
- Martinez-Valdes, E.; Negro, F.; Laine, C.; Falla, D.; Mayer, F.; Farina, D. Tracking motor units longitudinally across experimental sessions with high-density surface electromyography. J. Physiol. 2017, 595, 1479–1496. [Google Scholar] [CrossRef]
- Beck, T.W.; Housh, T.J.; Cramer, J.T.; Malek, M.H.; Mielke, M.; Hendrix, R.; Weir, J.P. A comparison of monopolar and bipolar recording techniques for examining the patterns of responses for electromyographic amplitude and mean power frequency versus isometric torque for the vastus lateralis muscle. J. Neurosci. Methods 2007, 166, 159–167. [Google Scholar] [CrossRef]
- Yokoyama, H.; Sasaki, A.; Kaneko, N.; Saito, A.; Nakazawa, K. Robust identification of motor unit discharges from high-density surface EMG in dynamic muscle contractions of the tibialis anterior. IEEE Access 2021, 9, 123901–123911. [Google Scholar] [CrossRef]
- De Luca, C.J.; Chang, S.S.; Roy, S.H.; Kline, J.C.; Nawab, S.H. Decomposition of surface EMG signals from cyclic dynamic contractions. J. Neurophysiol. 2015, 113, 1941–1951. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Condition | Accuracy (%) | Standard Deviation (%) |
|---|---|---|---|
| S1 | Dry | 97.93 | 0.75 |
| S2 | Dry | 95.95 | 2.97 |
| S1 | Wet | 98.39 | 0.96 |
| S2 | Wet | 98.54 | 0.66 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varghese, R.J.; Pizzi, M.; Kundu, A.; Grison, A.; Burdet, E.; Farina, D. Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array. Sensors 2024, 24, 1810. https://doi.org/10.3390/s24061810
Varghese RJ, Pizzi M, Kundu A, Grison A, Burdet E, Farina D. Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array. Sensors. 2024; 24(6):1810. https://doi.org/10.3390/s24061810
Chicago/Turabian StyleVarghese, Rejin John, Matteo Pizzi, Aritra Kundu, Agnese Grison, Etienne Burdet, and Dario Farina. 2024. "Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array" Sensors 24, no. 6: 1810. https://doi.org/10.3390/s24061810
APA StyleVarghese, R. J., Pizzi, M., Kundu, A., Grison, A., Burdet, E., & Farina, D. (2024). Design, Fabrication and Evaluation of a Stretchable High-Density Electromyography Array. Sensors, 24(6), 1810. https://doi.org/10.3390/s24061810