
A New Permanent Scatterer Selection Method Based on Gaussian Mixture Model for Micro-Deformation Monitoring Radar Images

 , , ,
, , ,
Abstract
1. Introduction
2. Methods
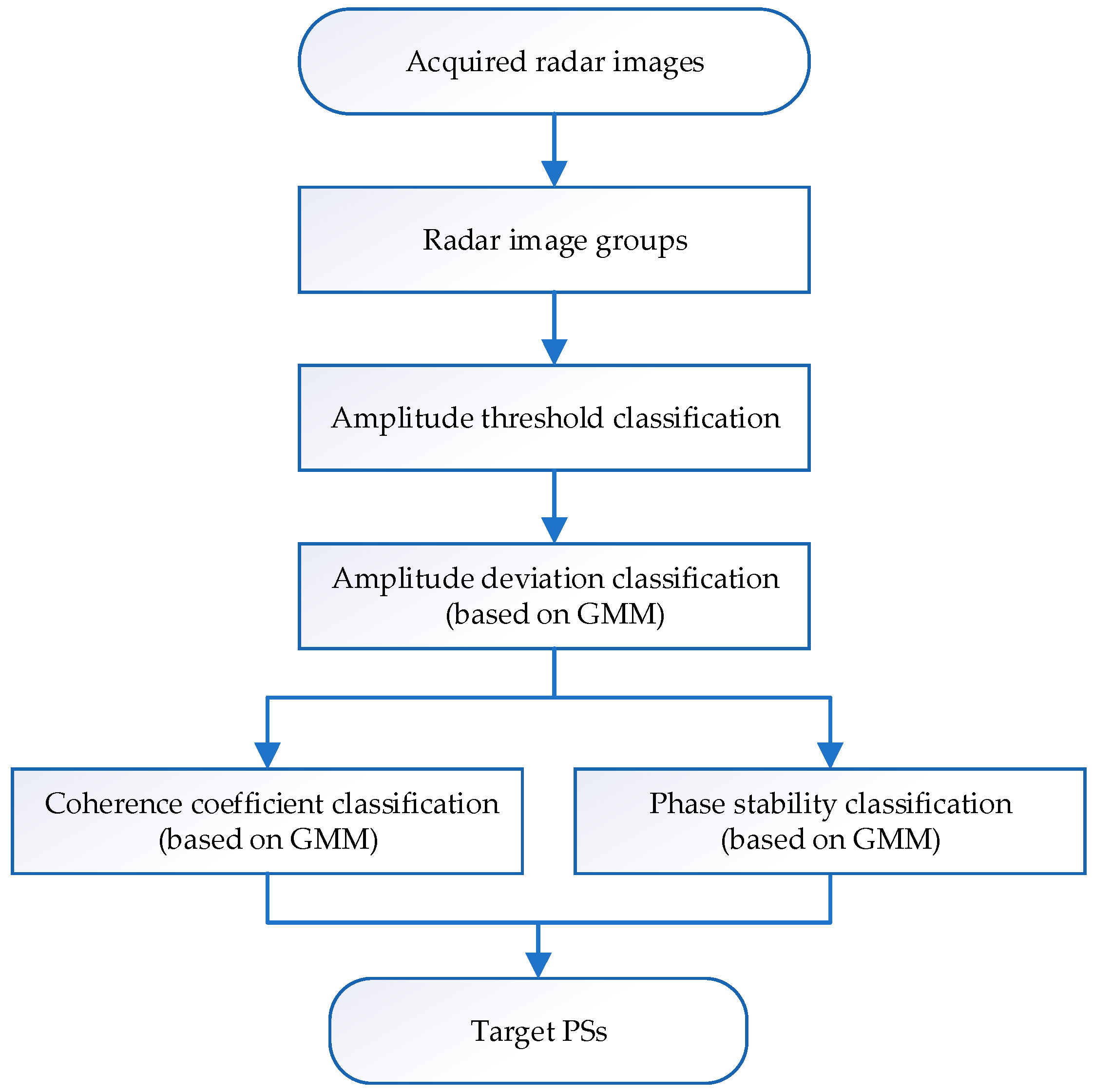
2.1. PS Selection Process
2.2. PS Selection-Specific Process
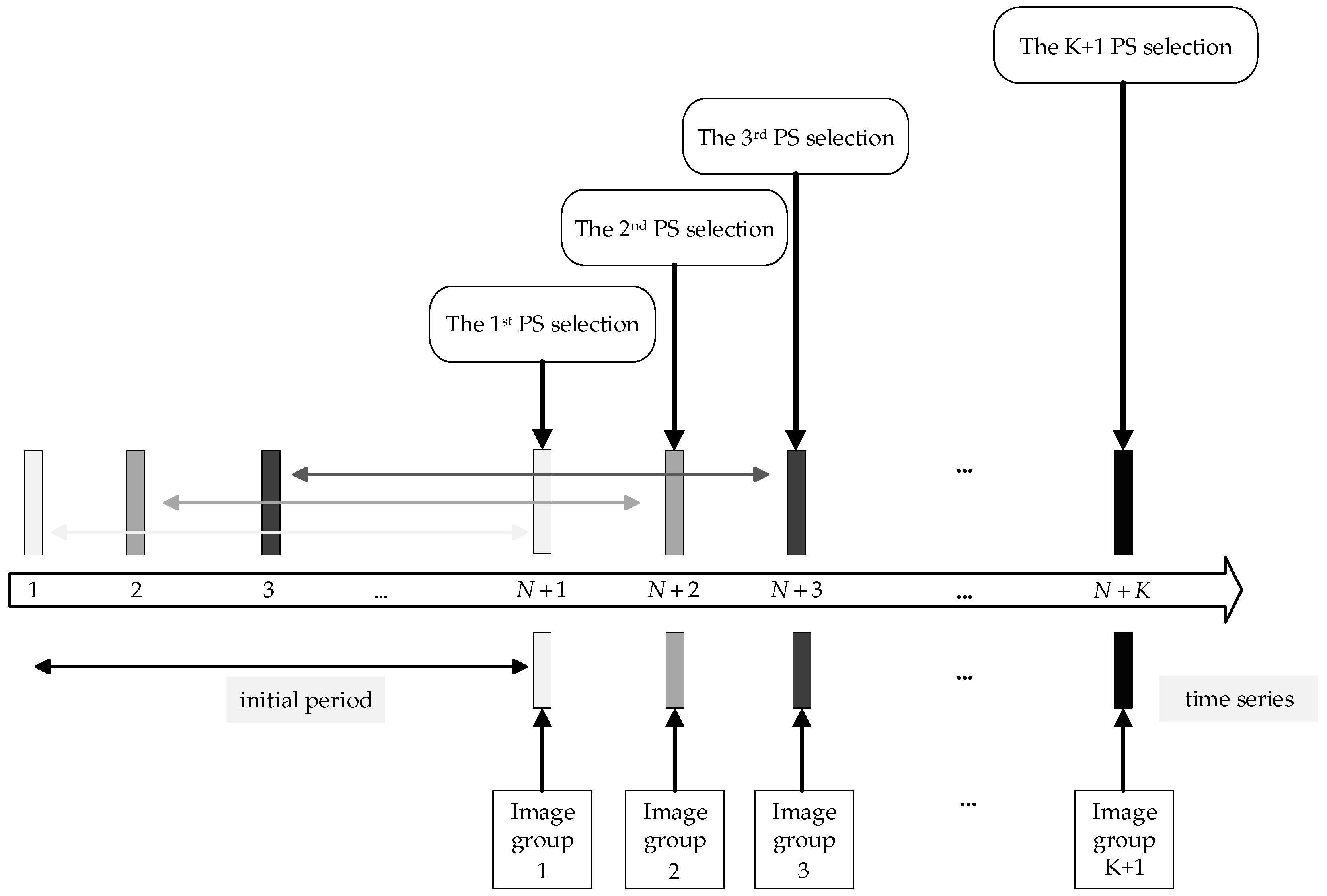
2.2.1. Radar Image Groups
2.2.2. Amplitude Threshold Classification
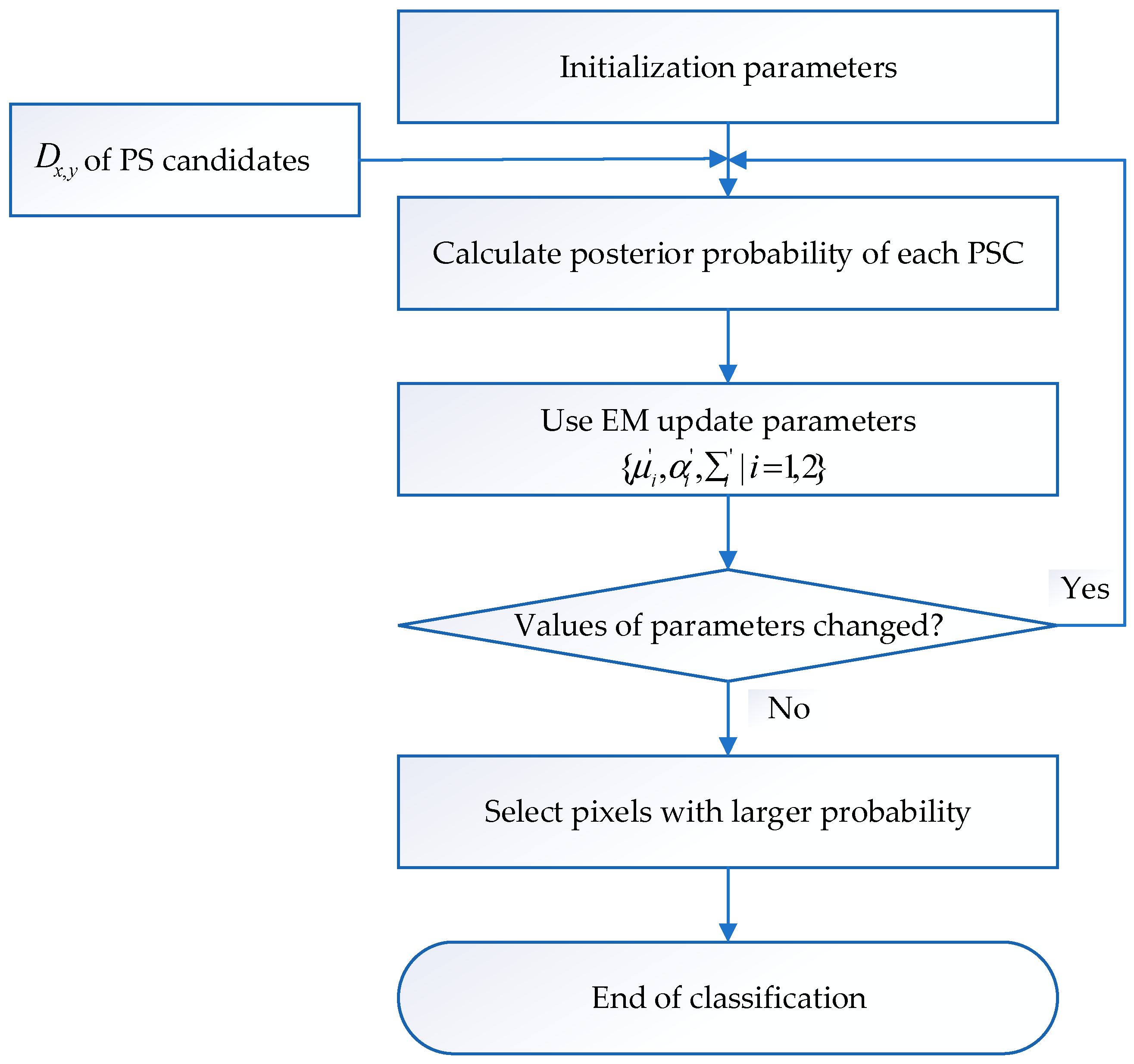
2.2.3. PS Optimization
3. Experiment and Results
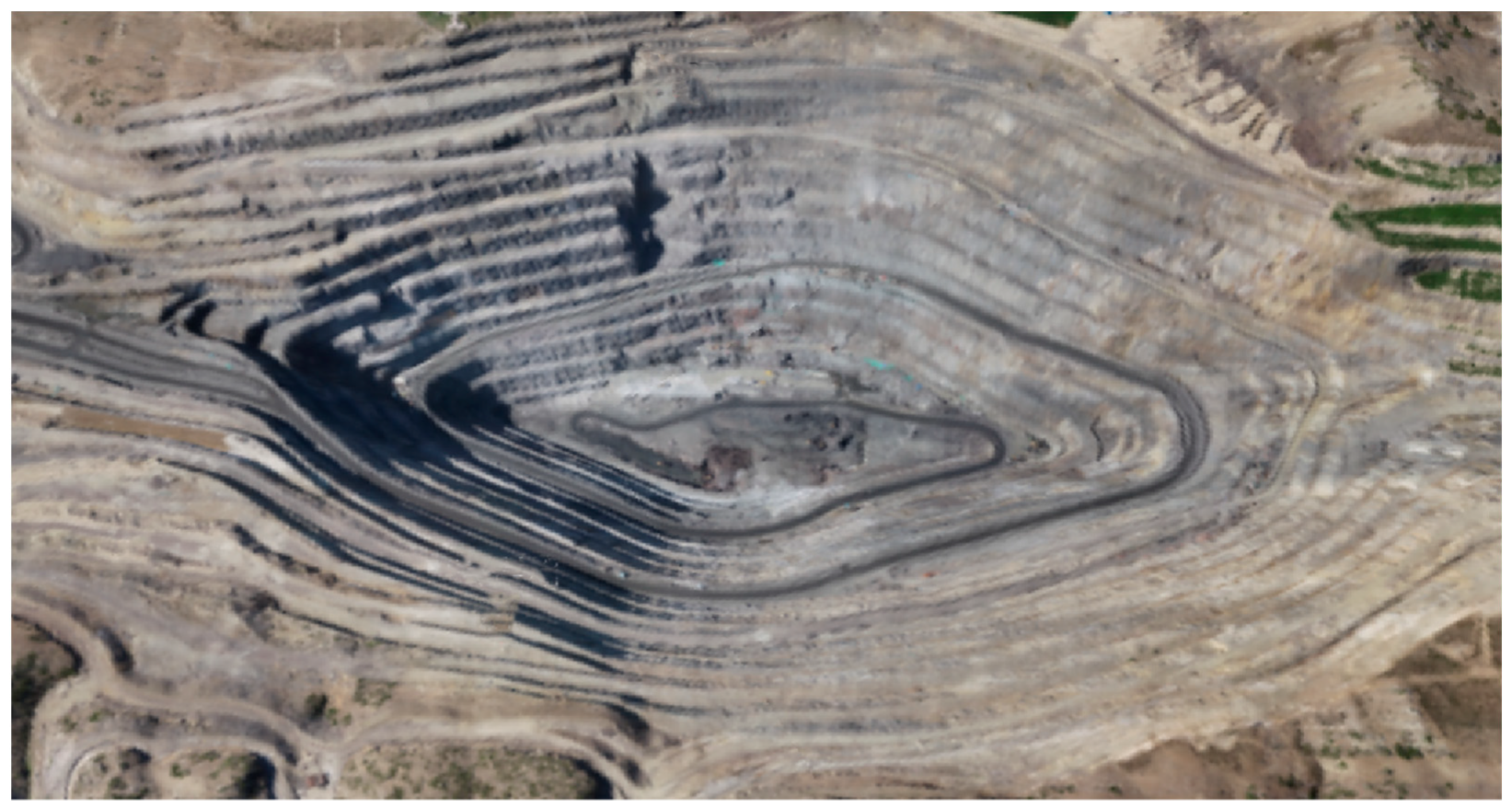
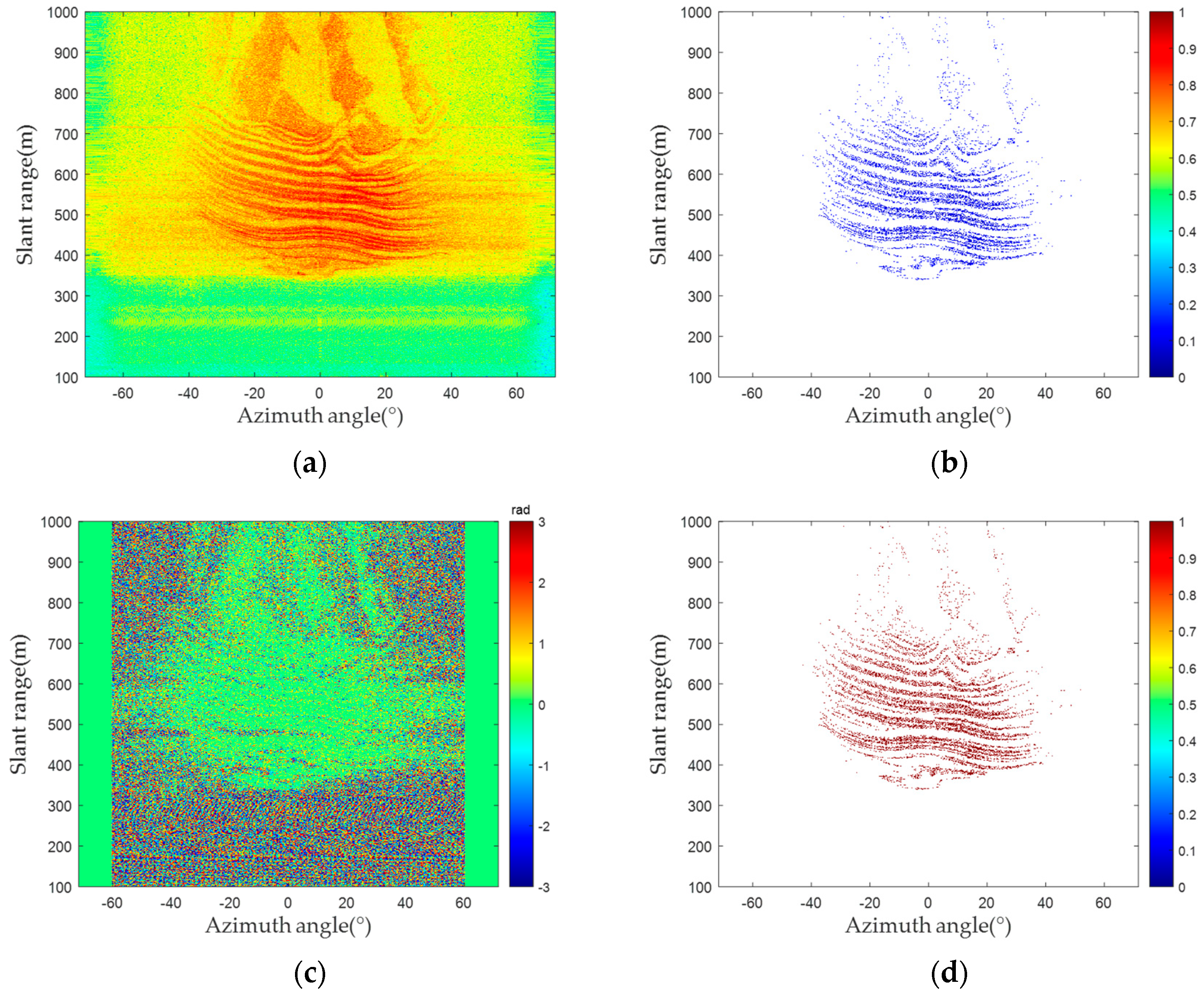
3.1. Experimental Area
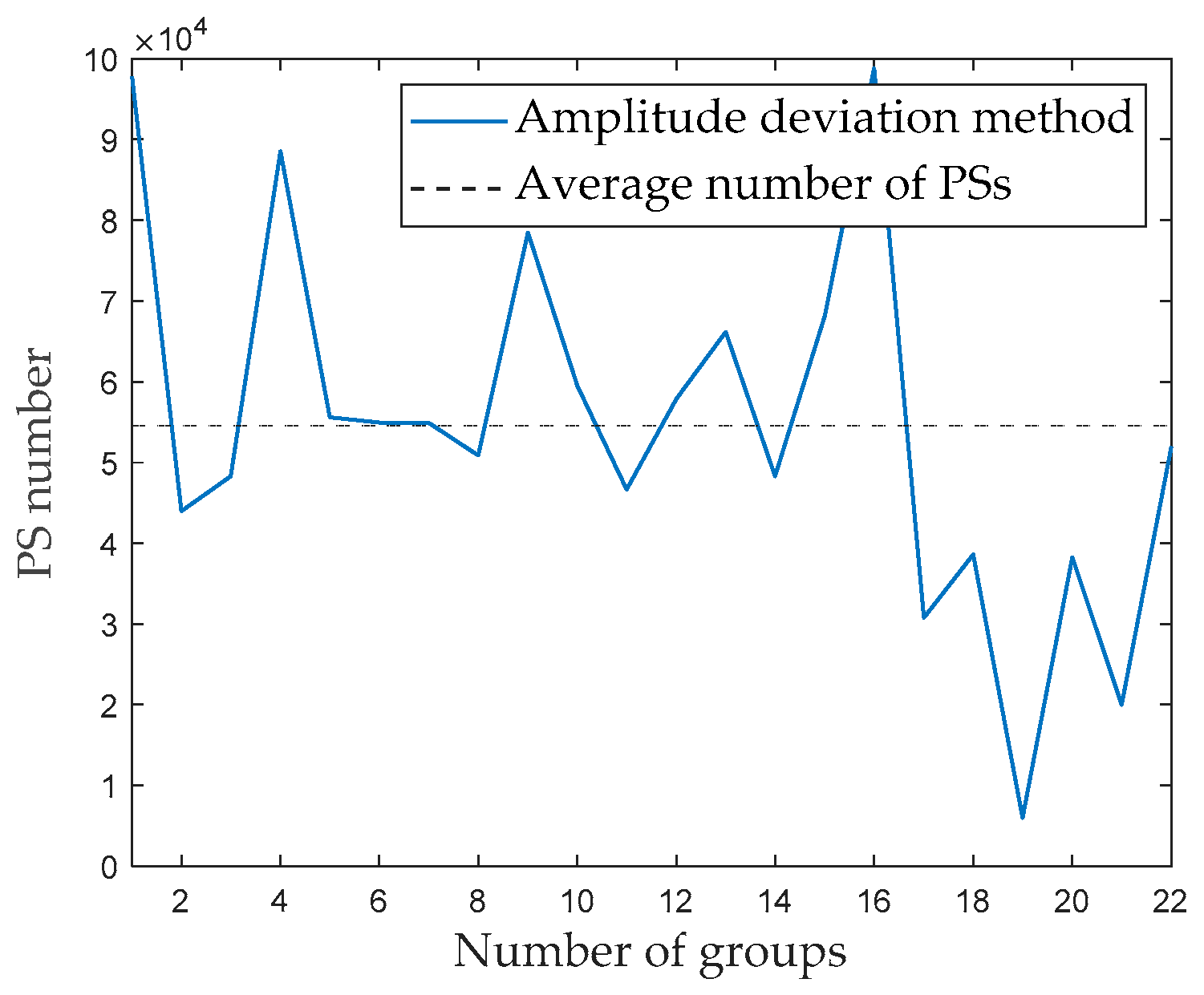
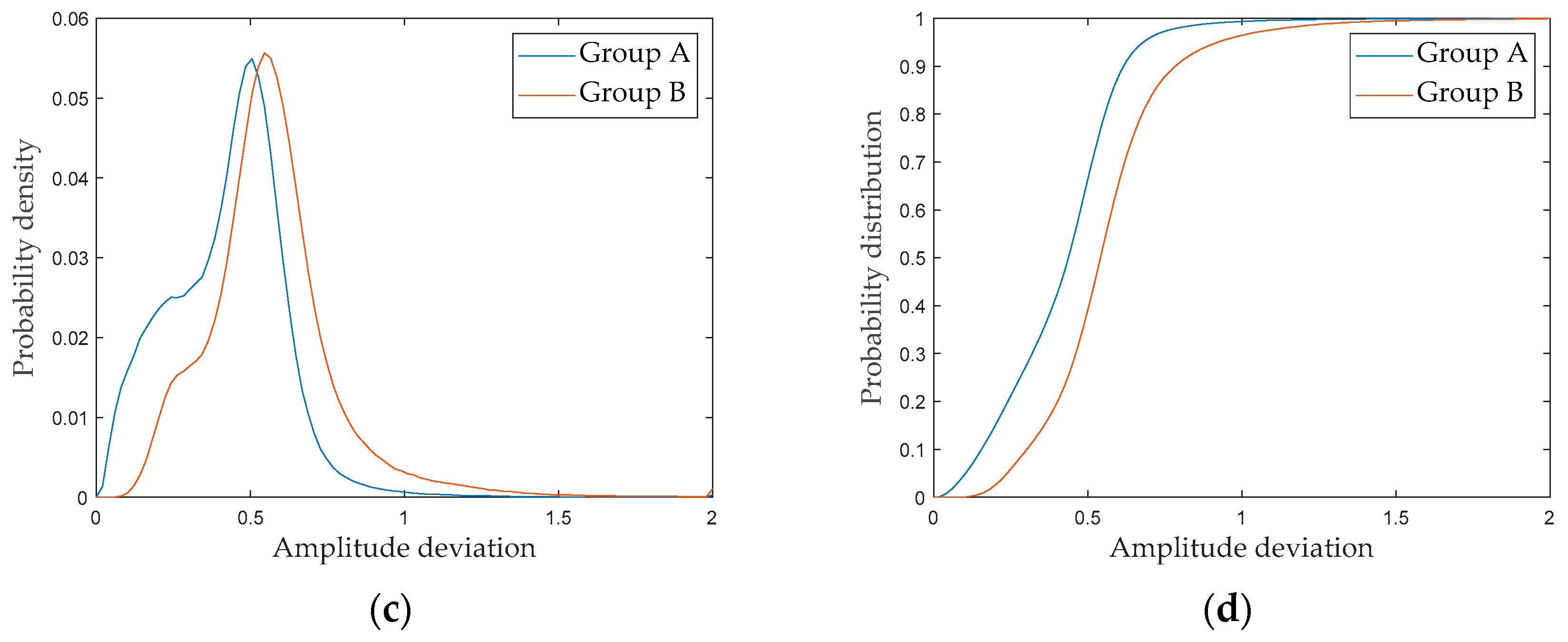
3.2. Amplitude Deviation Method
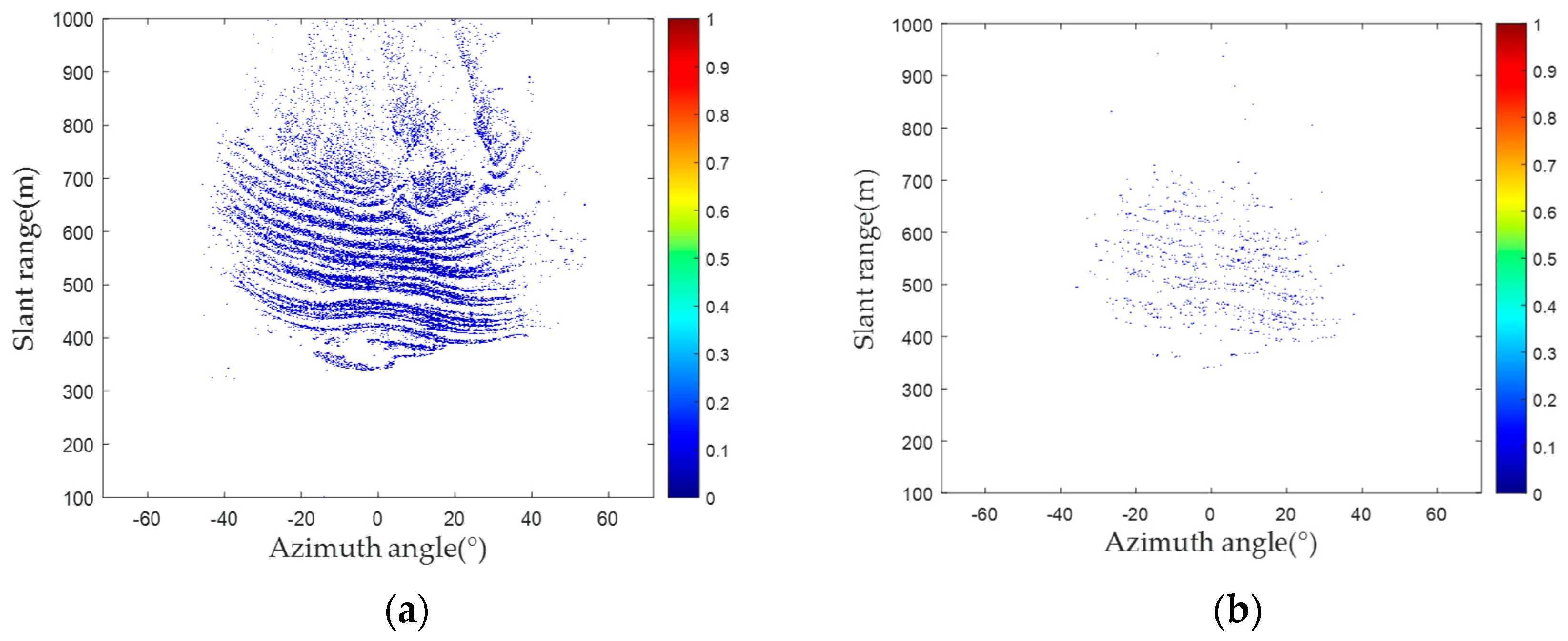
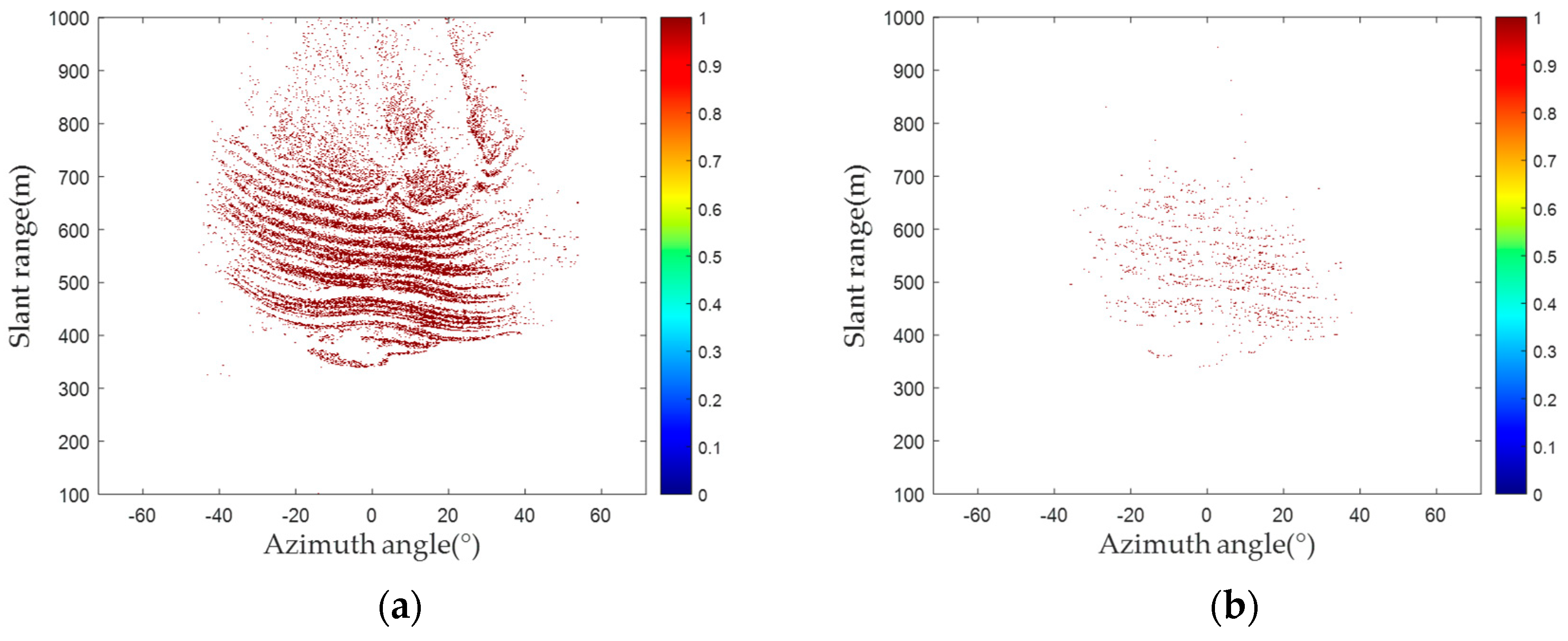
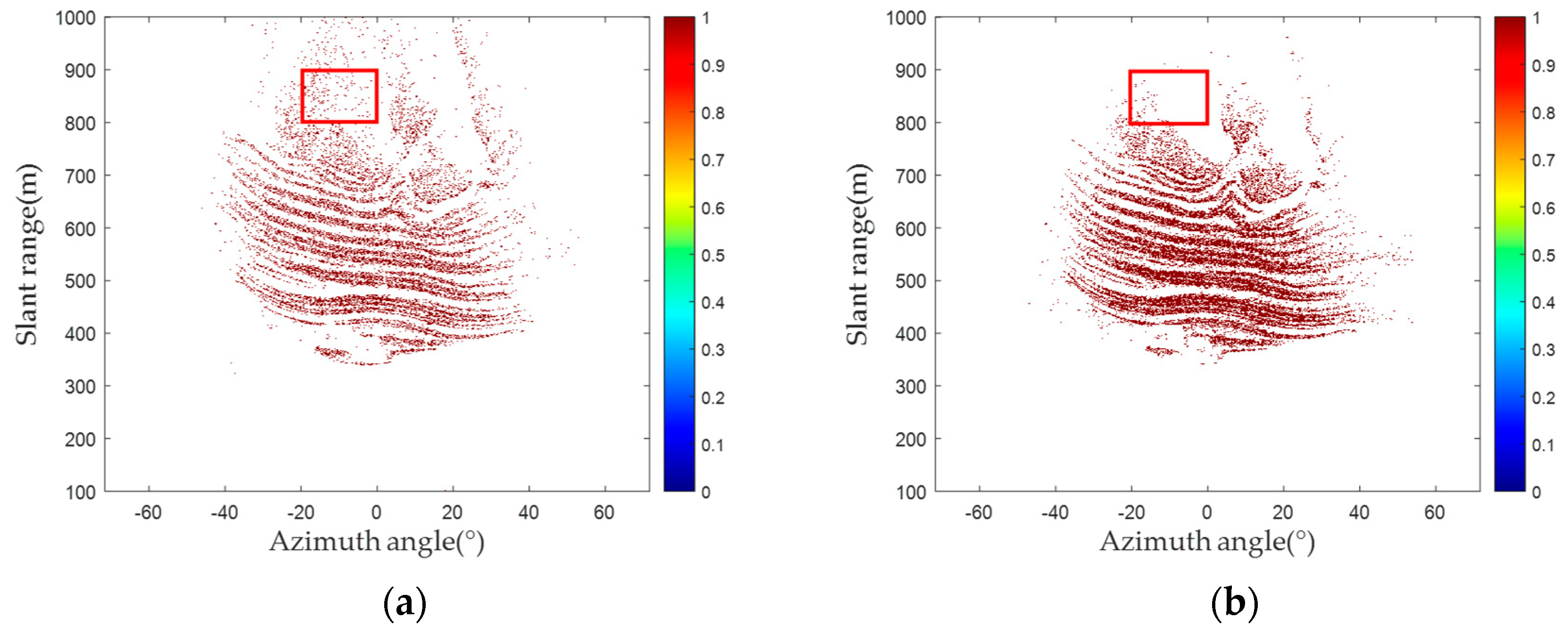
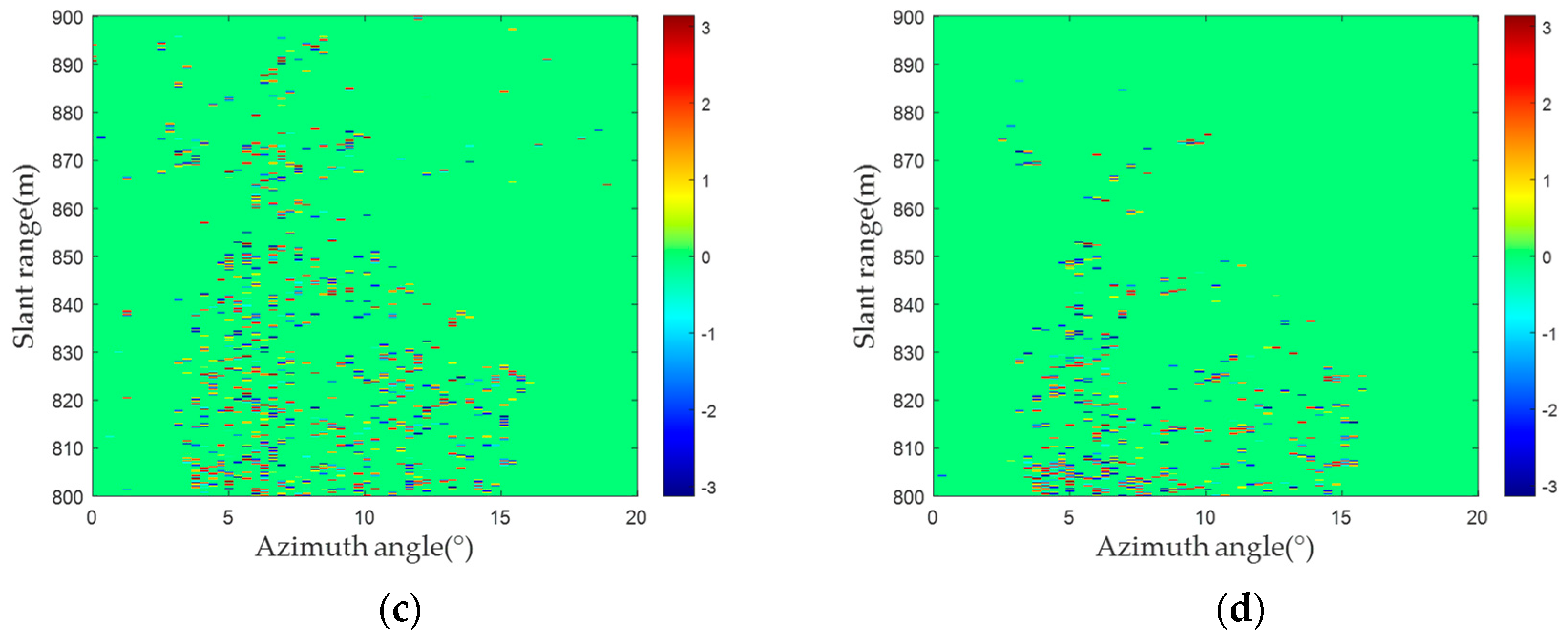
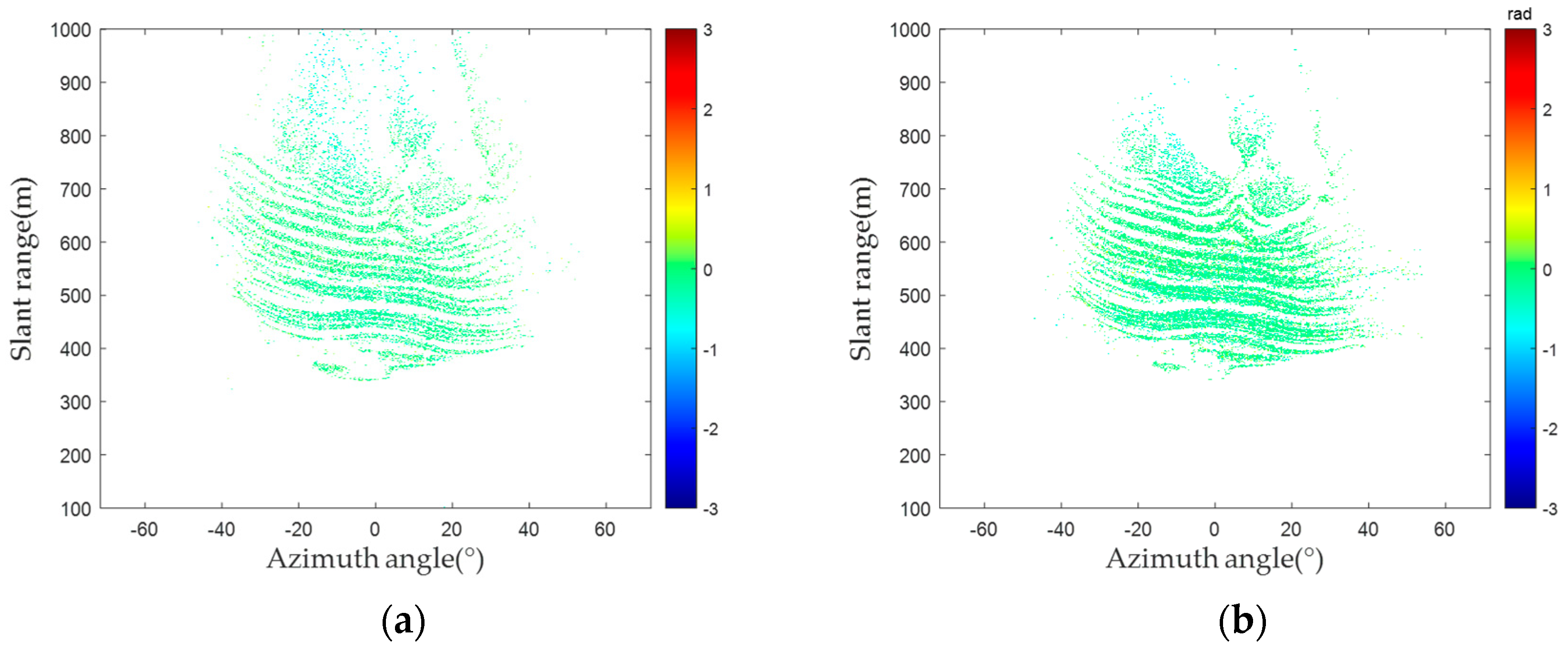
3.3. PS Selection Method Based on GMM
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, Y.K.; Koo, V.C.; Hii, H.H.; Lim, C.-S. A Ground-Based Interferometric Synthetic Aperture Radar Design and Experimental Study for Surface Deformation Monitoring. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–15. [Google Scholar] [CrossRef]
- Morrison, K.; Bennett, J.C.; Nolan, M. Using DInSAR to Separate Surface and Subsurface Features. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3424–3430. [Google Scholar] [CrossRef]
- Huang, Z.; Sun, J.; Tan, W.; Huang, P.; Han, K. Investigation of Wavenumber Domain Imaging Algorithm for Ground-Based Arc Array SAR. Sensors 2017, 17, 2950. [Google Scholar] [CrossRef]
- Wu, X.; Ma, H.; Zhang, Z. Development Status and Application of Ground-Based Synthetic Aperture Radar. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1073–1081. [Google Scholar]
- Liu, L.; Zhang, J.; Zhao, Z.; Kang, Q.; Xi, X.F. Research Status and Prospects of GB-SAR Deformation Monitoring Technology. Bull. Surv. Mapp. 2019, 11, 1–7. [Google Scholar]
- Qi, L.; Tan, W.; Huang, P.; Xu, W.; Zhang, M. Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar. Remote Sens. 2020, 12, 1230. [Google Scholar] [CrossRef]
- Tao, Z.; Yunkai, D.; Cheng, H.U.; Weiming, T.; Lab, R. Development State and Application Examples of Ground-based Differential Interferometric Radar. J. Radars 2019, 8, 154–170. [Google Scholar]
- Lei, T.; Wang, J.; Huang, P.; Tan, W.; Qi, Y.; Xu, W.; Zhao, C. Time-varying Baseline Error Correction Method for Ground-based Micro-deformation Monitoring Radar. J. Syst. Eng. Electron. 2022, 33, 938–950. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Mills, J. A New Approach to Selecting Coherent Pixels for Ground-Based SAR Deformation Monitoring-Science Direct. ISPRS J. Photogramm. Remote Sens. 2018, 144, 412–422. [Google Scholar] [CrossRef]
- Noferini, L.; Pieraccini, M.; Mecatti, D.; Luzi, G.; Atzeni, C.; Tamburini, A.; Broccolato, M. Permanent Scatterers Analysis for Atmospheric Correction in Ground-based SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1459–1471. [Google Scholar] [CrossRef]
- Goel, K.; Adam, N. A Distributed Scatterer Interferometry Approach for Precision Monitoring of Known Surface Deformation Phenomena. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5454–5468. [Google Scholar] [CrossRef]
- Liu, B.; Ge, D.; Zhang, L.; Li, M.; Wang, Y.; Wang, Y.; Chang, X.; Jiang, L.; Liu, L.; Sun, Y.; et al. Application of Monitoring Stability after Landslide Based on Ground-Based InSAR. J. Geod. Geodyn. 2016, 36, 674–677. [Google Scholar]
- Yang, B.; Xu, H.; Liu, W.; Ge, J.; Li, C.; Li, J. An Improved Stanford Method for Persistent Scatterers Applied to 3D Building Reconstruction and Monitoring. Remote Sens. 2019, 11, 1807. [Google Scholar] [CrossRef]
- Jiang, M.; Ding, X.; Hanssen, R.F.; Malhotra, R.; Chang, L. Fast Statistically Homogeneous Pixel Selection for Covariance Matrix Estimation for Multitemporal InSAR. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1213–1224. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Hu, C.; Deng, Y.; Tian, W.; Wang, J. A PS Processing Framework for Long-Term and Real-Time GB-SAR Monitoring. Int. J. Remote Sens. 2019, 40, 6298–6314. [Google Scholar] [CrossRef]
- Iglesias, R.; Mallorqui, J.J.; Monells, D.; López-Martínez, C.; Fabregas, X.; Aguasca, A.; Gili, J.A.; Corominas, J. PSI Deformation Map Retrieval by Means of Temporal Sublook Coherence on Reduced Sets of SAR Images. Remote Sens. 2015, 7, 530–563. [Google Scholar] [CrossRef]
- Xiang, X.; Chen, J.; Wang, H.; Pei, L.; Wu, Z. PS Selection Method for and Application to GB-SAR Monitoring of Dam Deformation. Adv. Civ. Eng. 2019, 2019, 8320351. [Google Scholar] [CrossRef]
- Long, S.; Li, T.; Feng, T. Study on Selection of PS Point Targets. Geod. Geodyn. 2011, 31, 144–148. [Google Scholar]
- Wang, Y.P.; Lv, S.; Bai, Z.C.; Qu, H.Q. Research on GBSAR Deformation Extraction Method Based on Three-threshold. In Proceedings of the 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018. [Google Scholar]
- Chen, Q.; Liu, G.X.; Li, Y.S.; Ding, X.L. Automated Detection of Permanent Scatterers in Radar Interferometry: Algorithm and Testing Results. Acta Geod. Cartogr. Sin. 2006, 35, 112–117. [Google Scholar]
- Tan, W.; Wang, Y.; Huang, P.; Qi, Y.; Xu, W.; Li, C.; Chen, Y. A Method for Predicting Landslides Based on Micro-Deformation Monitoring Radar Data. Remote Sens. 2023, 15, 826. [Google Scholar] [CrossRef]
- Deng, Y.; Tian, W.; Xiao, T.; Hu, C.; Yang, H. High-Quality Pixel Selection Applied for Natural Scenes in GB-SAR Interferometry. Remote Sens. 2021, 13, 1617. [Google Scholar] [CrossRef]
- Kang, Y.; Zhang, Y.; Wu, H. A New Method to Extract Permanent Scatterers. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 389–394. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novell, F. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Y.; Fei, W. Modified Statistically Homogeneous Pixels’ Selection with Multitemporal SAR Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1930–1934. [Google Scholar] [CrossRef]
- Jiang, M.; Monti-Guarnieri, A. Distributed Scatterer Interferometry With the Refinement of Spatiotemporal Coherence. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3977–3987. [Google Scholar] [CrossRef]
- Izumi, Y.; Nico, G.; Sato, M. Time-Series Clustering Methodology for Estimating Atmospheric Phase Screen in Ground-Based InSAR Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5206309. [Google Scholar] [CrossRef]
- Falabella, F.; Perrone, A.; Stabile, T.A.; Pepe, A. Atmospheric Phase Screen Compensation on Wrapped Ground-Based SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5202115. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef]
- Luo, X.; Huang, D.; Liu, G. Automated Detection of Permanent Scatterers in Time Serial Differential Radar Interferometry. J. Southwest Jiaotong Univ. 2007, 42, 414–418. [Google Scholar]
- Pernkopf, F.; Bouchaffra, D. Genetic-based EM algorithm for learning Gaussian mixture models. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1344–1348. [Google Scholar] [CrossRef] [PubMed]
- Touzi, R.; Lopes, A.; Bruniquel, J.; Vachon, P.W. Coherence Estimation for SAR Imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, G.X.; Ding, X.L.; Li, Y.S. Radar Differential Interferometry Based on Permanent Scatterers and its Application to Detecting Regional Ground Subsidence. Chin. J. Geophys.—Chin. Ed. 2007, 50, 737–743. [Google Scholar]
- Iglesias, R.; Fabregas, X.; Aguasca, A.; Mallorqui, J.J.; Corominas, J. Atmospheric Phase Screen Compensation in Ground-Based SAR With a Multiple-Regression Model Over Mountainous Regions. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2436–2449. [Google Scholar] [CrossRef]
- Hu, C.; Deng, Y.; Tian, W.; Zhao, Z. A Compensation Method for a Time–Space Variant Atmospheric Phase Applied to Time-Series GB-SAR Images. Remote Sens. 2019, 11, 2350. [Google Scholar] [CrossRef]
- Karunathilake, A.; Sato, M. Atmospheric Phase Compensation in Extreme Weather Conditions for Ground-Based SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3806–3815. [Google Scholar] [CrossRef]
- Huang, Z.; Sun, J.; Li, Q.; Tan, W.; Huang, P.; Qi, Y. Time- and Space-Varying Atmospheric Phase Correction in Discontinuous Ground-Based Synthetic Aperture Radar Deformation Monitoring. Sensors 2018, 18, 3883. [Google Scholar] [CrossRef]
- Tang, J.; Liu, Y.; Jin, C.; Cao, X. Highly Coherent Points Selection Method in a Complex Environment. In Proceedings of the SPIE 12166, Seventh Asia Pacific Conference on Optics Manufacture and 2021 International Forum of Young Scientists on Advanced Optical Manufacturing (APCOM and YSAOM 2021), Shanghai, China, 15 February 2022; p. 1216617. [Google Scholar]
- Yang, H.; Tian, W.; Deng, Y.; Nie, X.; Feng, L.; Zhang, Y. High-coherence Pixel Selection of Ground-based SAR for Vegetation Slopes. J. Signal Process. 2022, 38, 137–147. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard Deviation/rad | Amplitude Deviation Method | Proposed Method | Increased Percentage |
|---|---|---|---|
| Number | Number | ||
| <0.1 | 8817 | 10,661 | 20.91% |
| <0.3 | 57,272 | 81,587 | 42.45% |
| <0.5 | 65,276 | 95,424 | 46.19% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, W.; Li, J.; Hou, T.; Huang, P.; Qi, Y.; Xu, W.; Li, C.; Chen, Y. A New Permanent Scatterer Selection Method Based on Gaussian Mixture Model for Micro-Deformation Monitoring Radar Images. Sensors 2024, 24, 1809. https://doi.org/10.3390/s24061809
Tan W, Li J, Hou T, Huang P, Qi Y, Xu W, Li C, Chen Y. A New Permanent Scatterer Selection Method Based on Gaussian Mixture Model for Micro-Deformation Monitoring Radar Images. Sensors. 2024; 24(6):1809. https://doi.org/10.3390/s24061809
Chicago/Turabian StyleTan, Weixian, Jing Li, Ting Hou, Pingping Huang, Yaolong Qi, Wei Xu, Chunming Li, and Yuejuan Chen. 2024. "A New Permanent Scatterer Selection Method Based on Gaussian Mixture Model for Micro-Deformation Monitoring Radar Images" Sensors 24, no. 6: 1809. https://doi.org/10.3390/s24061809
APA StyleTan, W., Li, J., Hou, T., Huang, P., Qi, Y., Xu, W., Li, C., & Chen, Y. (2024). A New Permanent Scatterer Selection Method Based on Gaussian Mixture Model for Micro-Deformation Monitoring Radar Images. Sensors, 24(6), 1809. https://doi.org/10.3390/s24061809