

An Improved A-Star Path Planning Algorithm Based on Mobile Robots in Medical Testing Laboratories
Abstract
1. Introduction
- Based on the evaluation function of the traditional A-star algorithm, the heuristic function is improved by introducing the angle and scale factor of the line connecting the node to the start point and the goal point.
- We adopt the bidirectional search strategy to compute the coordinates of the intermediate point from the coordinates of the start and the goal points, and at the same time traverse the nodes from the intermediate point to the start and the goal points.
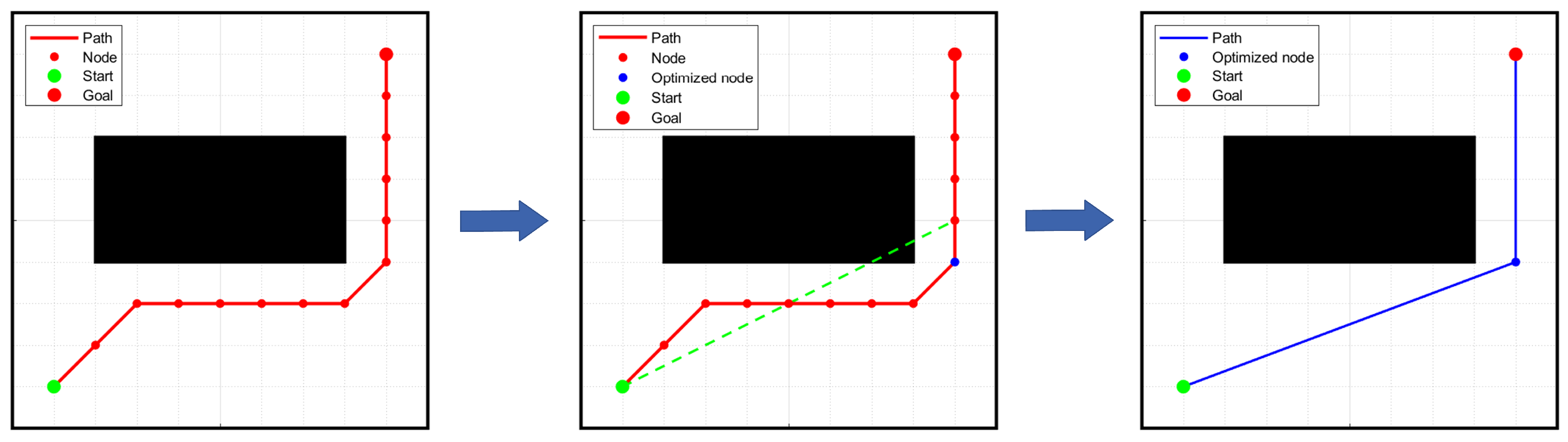
- We optimize the path to remove redundant nodes by judging the intersection of the links between nodes with obstacles.
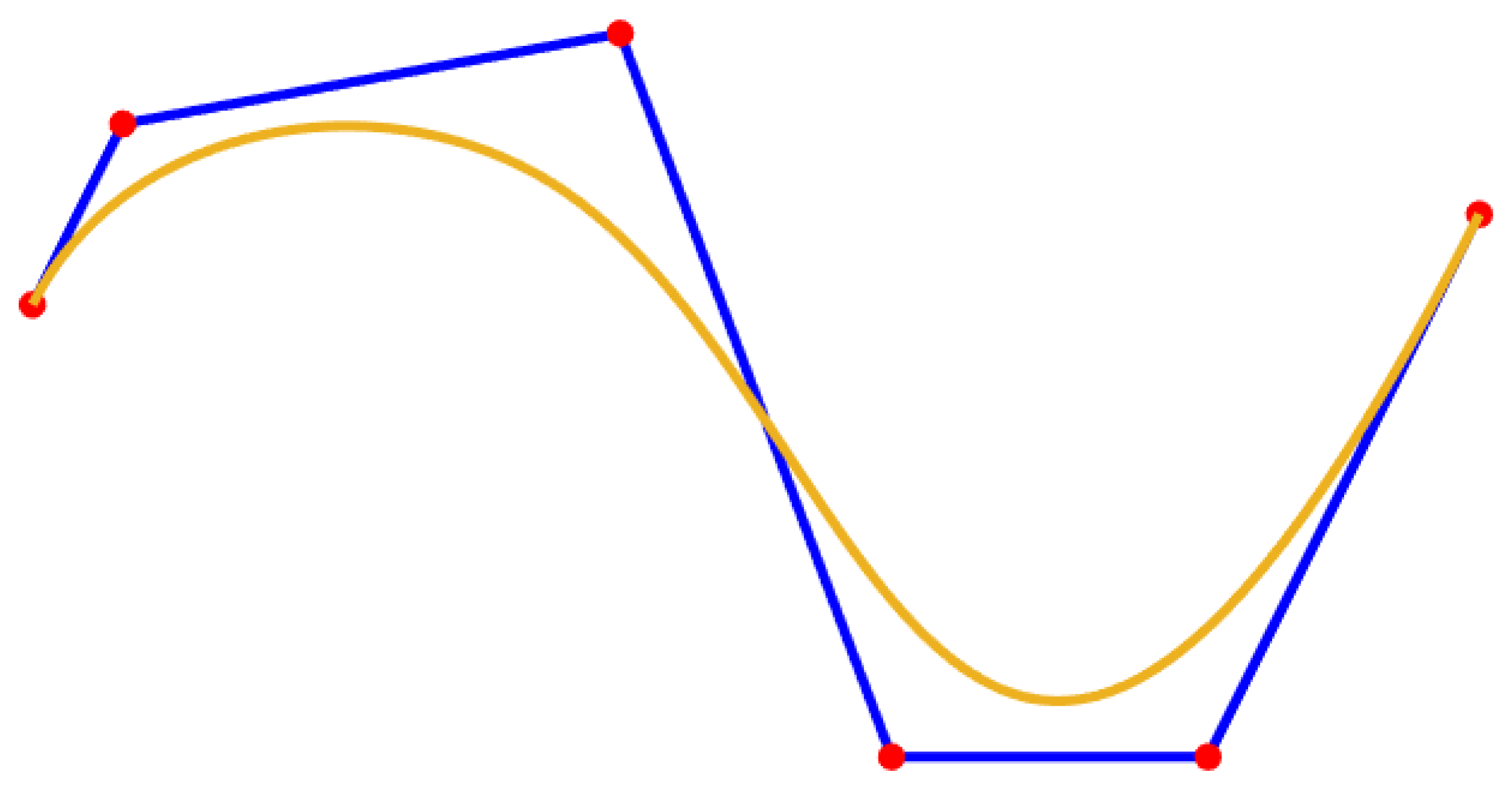
- After removing redundant nodes, the cubic uniform B-spline curve is introduced to smooth the path.
2. Conventional A-Star Algorithm
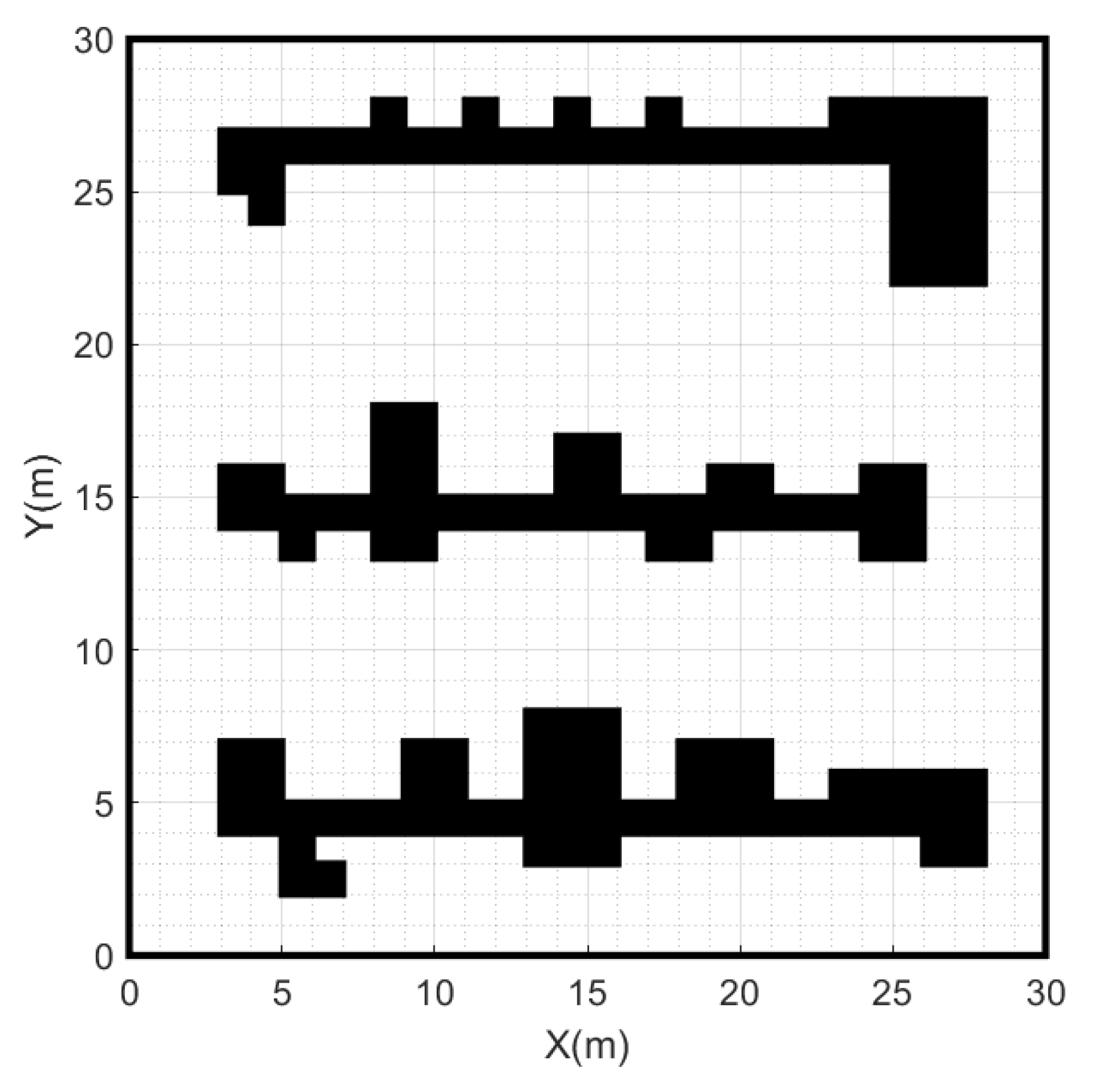
2.1. Establishment of Environment Model
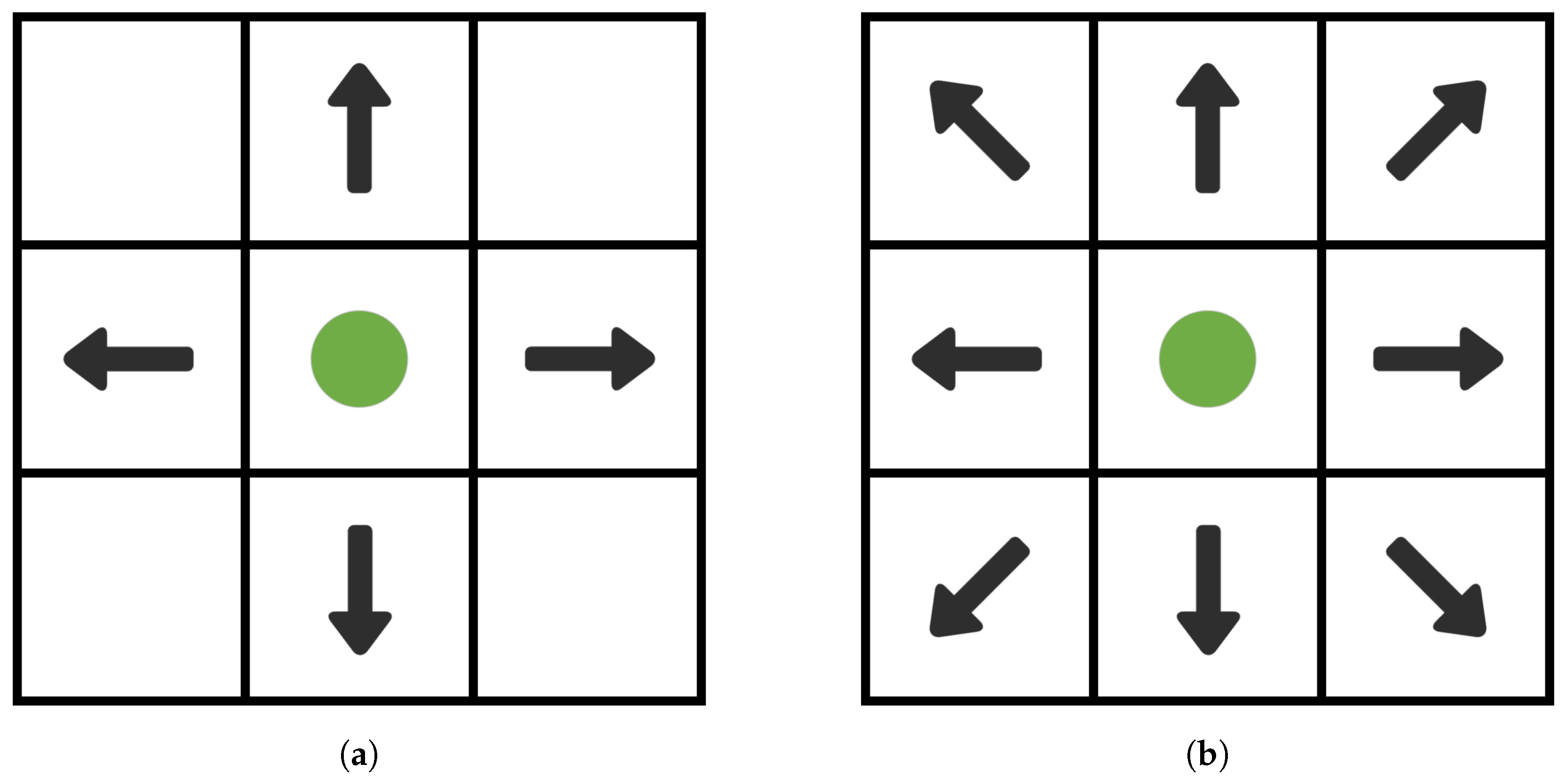
2.2. Search Neighborhood Selection
2.3. Principle of Traditional A-Star Algorithm
3. Improved A-Star Algorithm
3.1. Improving the Evaluation Function
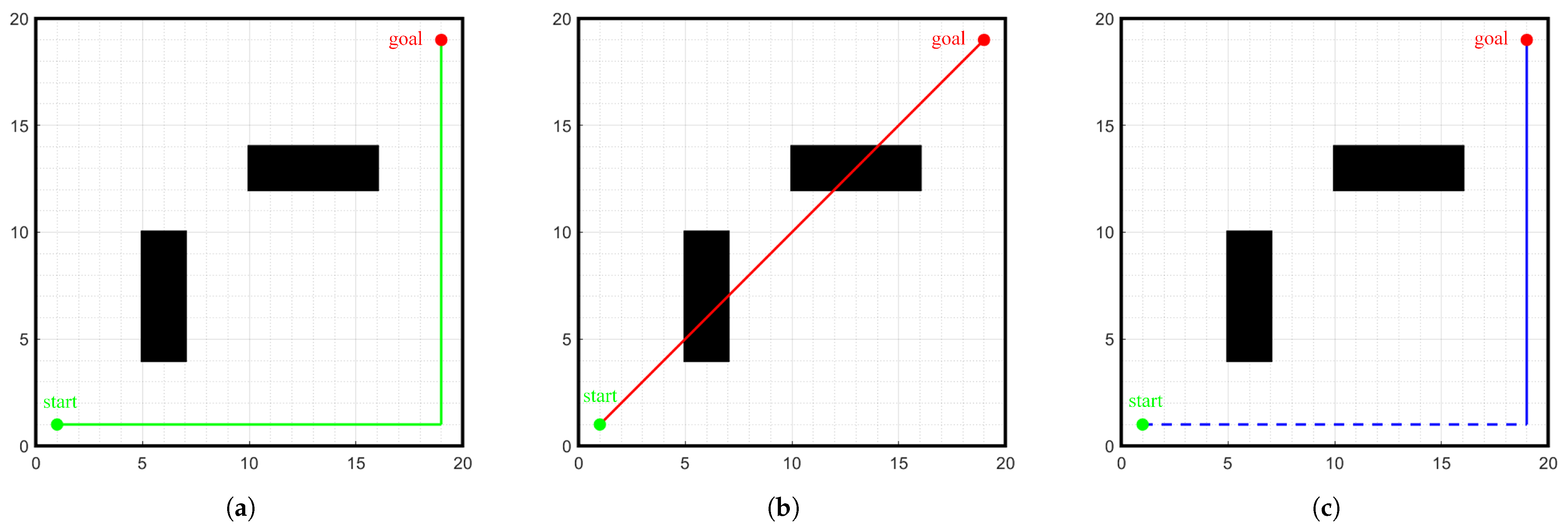
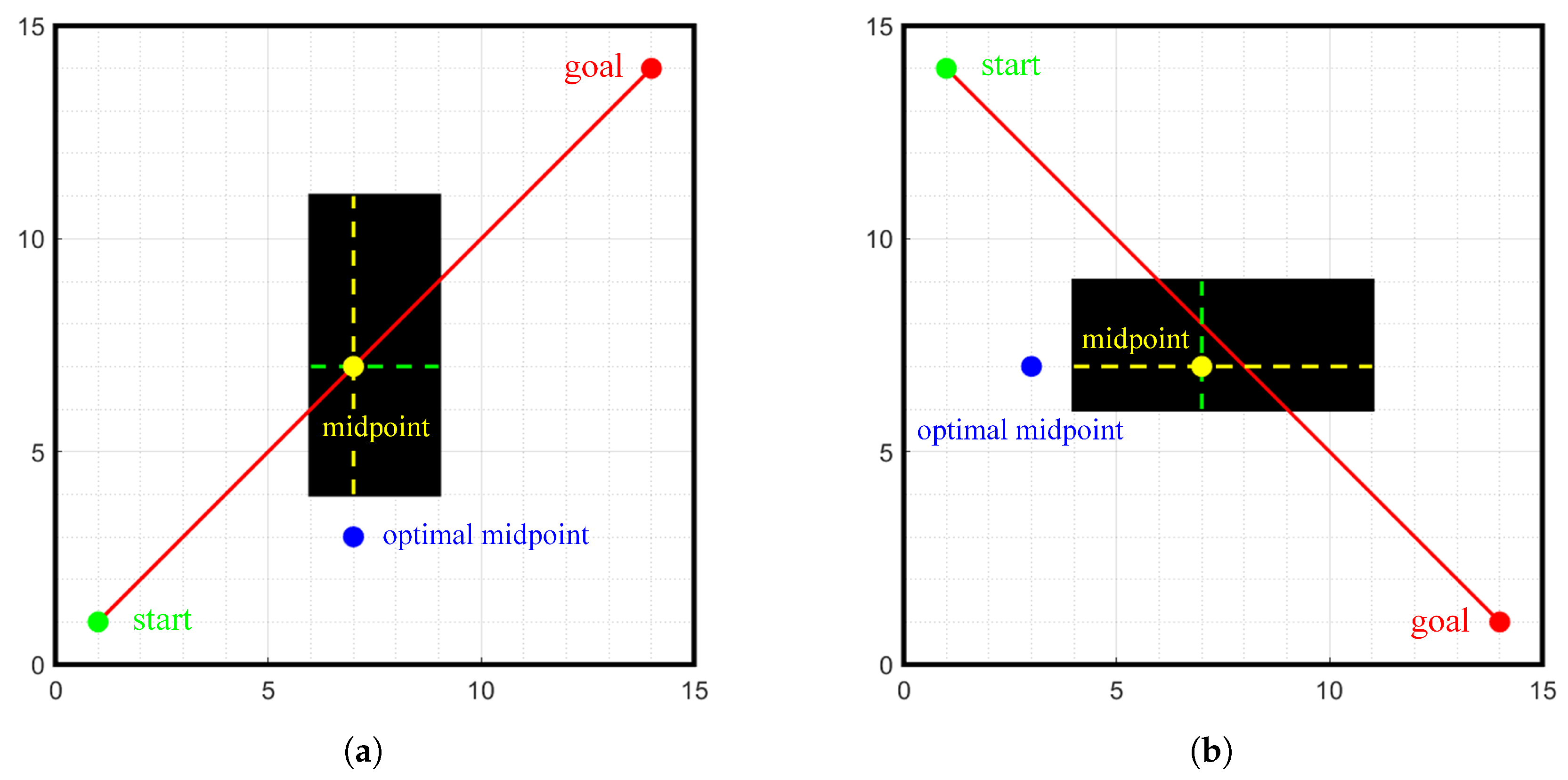
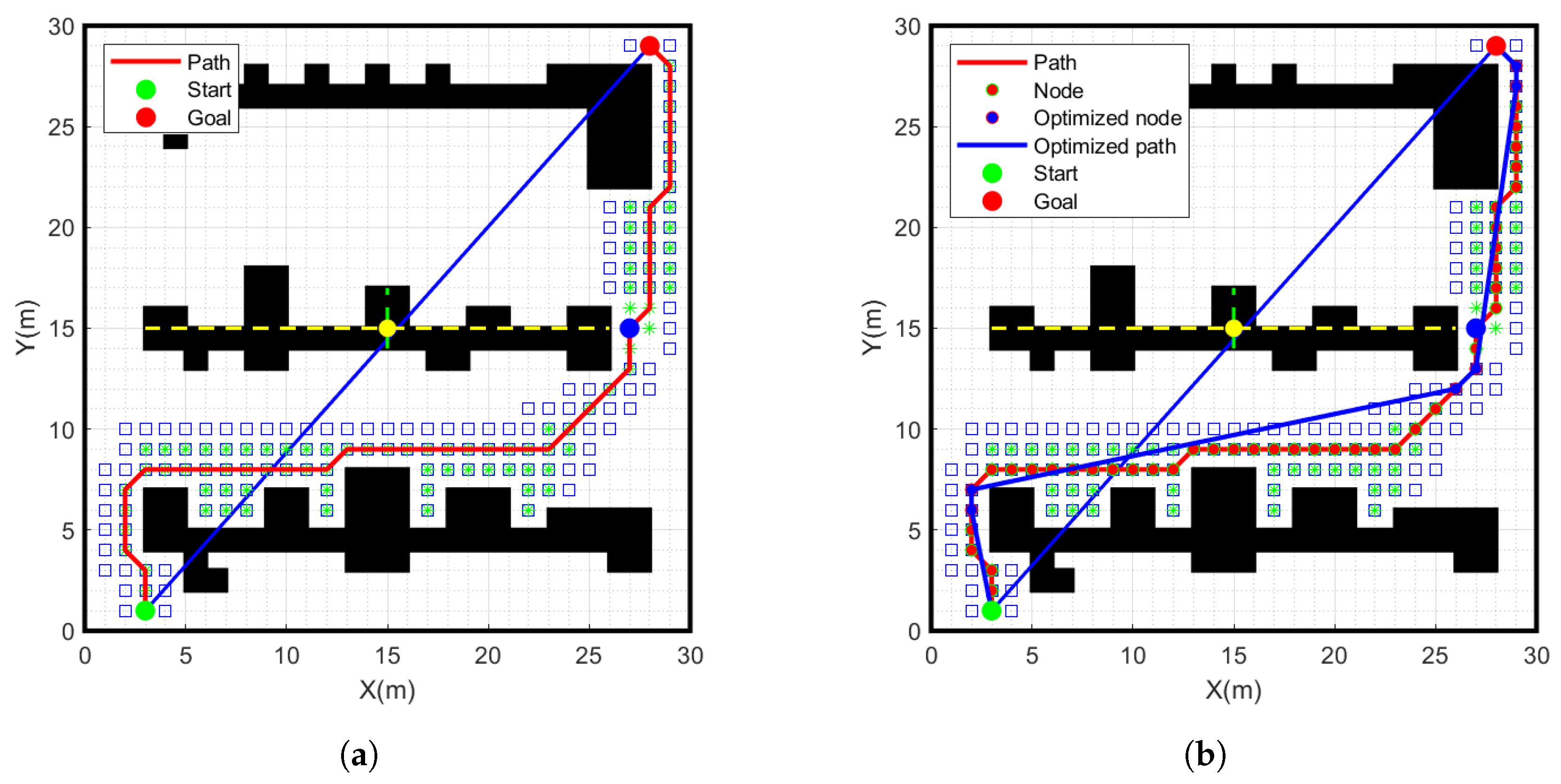
3.2. Introducing the Bidirectional Search Strategy
- Step 1:
- Determine the position of the midpoint.
- Step 2:
- Draw a horizontal line and a vertical line at the midpoint position.
- Step 3:
- Calculate the length of horizontal and vertical lines when crossing obstacles.
- Step 4:
- Select the direction with the longer crossing length and, in that direction, find the earliest point to cross the obstacle.
- Step 5:
- Select the earliest point that crosses the obstacle as the optimized midpoint.
3.3. Removing Redundant Nodes
- Step 1:
- Use the start point as the start node.
- Step 2:
- Along the path, connect the start point to each node in the path one by one.
- Step 3:
- If the connecting line segment intersects an obstacle, the previous node of the intersecting node is retained and considered as the next start node, and all nodes between that node and the previous start node are removed. Then, return to step two.
- Step 4:
- If the connecting line segment does not intersect any obstacles until it reaches the goal point, the goal point is retained and all nodes between the start node and the goal point are removed.
- Step 5:
- Connect the retained nodes in the path sequentially to form a new path.
3.4. Smoothing the Planned Path
3.5. Process and Pseudo-Code of the Improved A-Star Algorithm
4. Simulation Experiment and Analysis
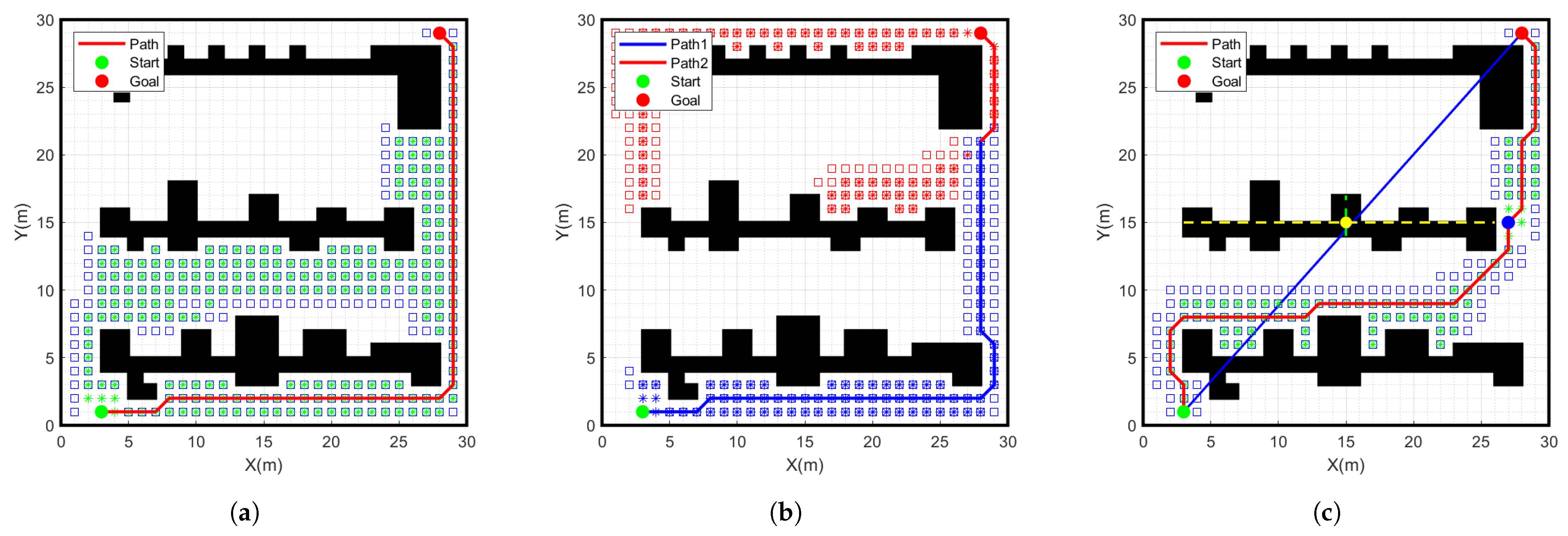
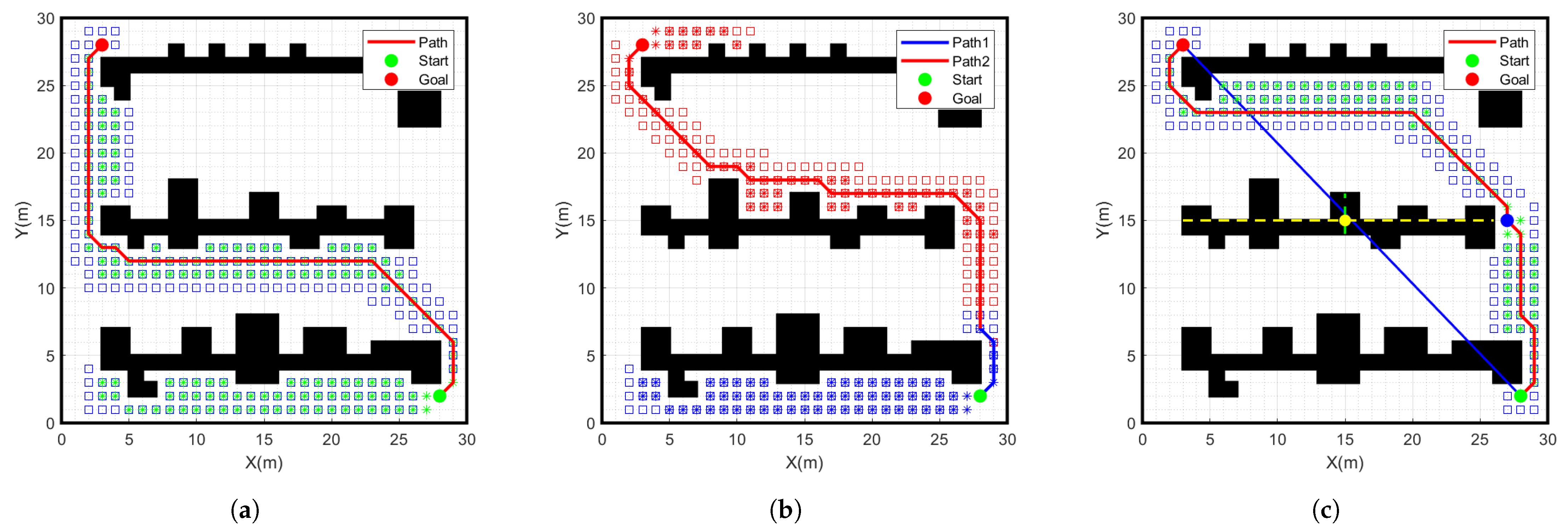
4.1. Path Planning Simulation Experiment
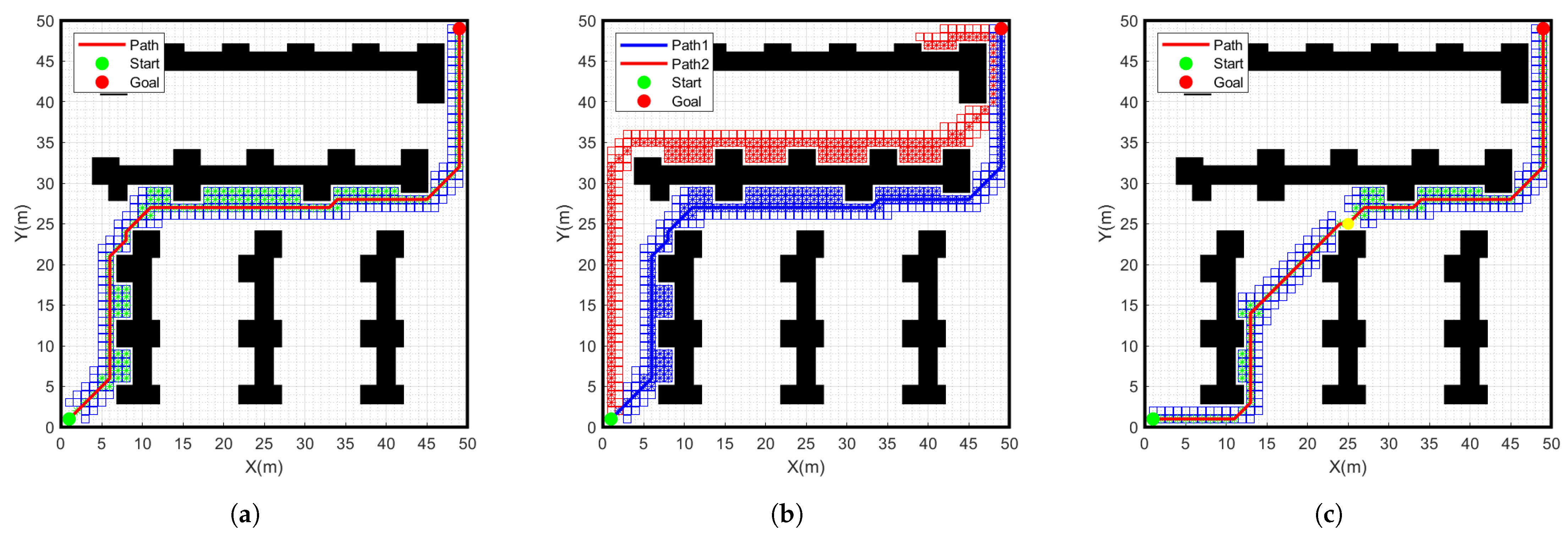
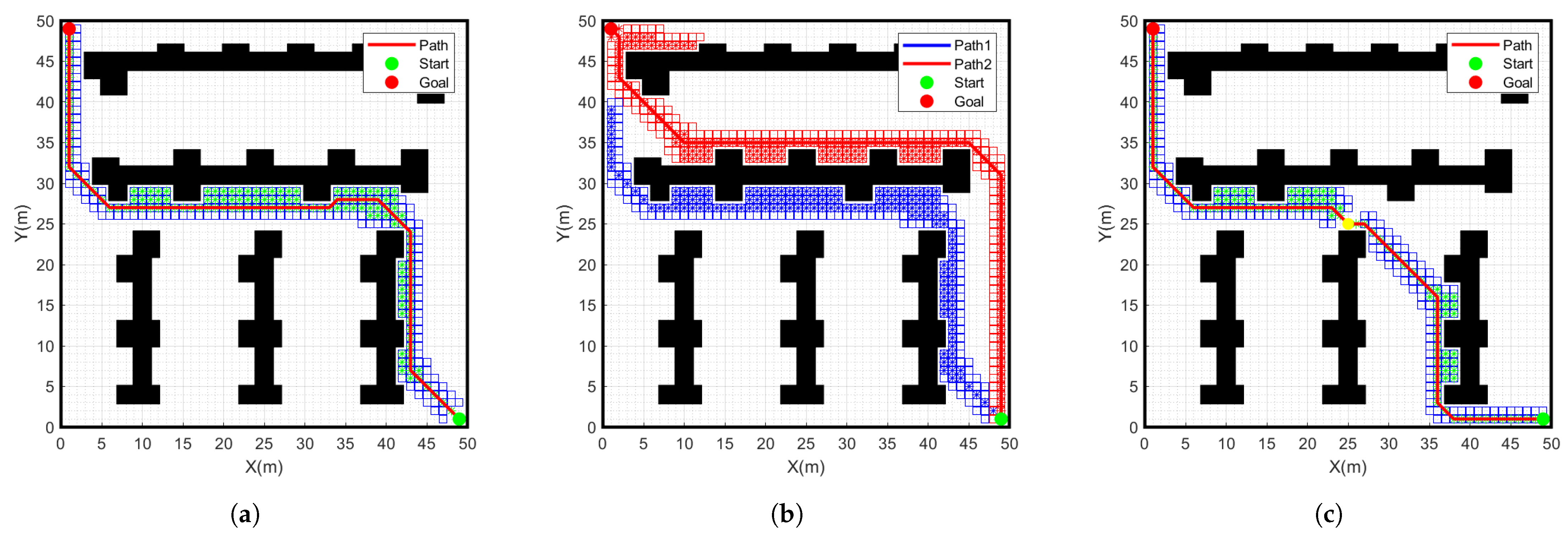
4.2. Simulation Comparison of Different Grid Maps
4.3. Simulation Experiment of Smooth Path
5. Conclusions
- The algorithm proposed in this paper is primarily designed for static environments and does not consider the influence of dynamic obstacles such as people in real medical testing laboratories. This limitation may cause the mobile robot to be unable to sense changes in the environment in time during the execution of the path; thus, the actual execution of the path is affected by dynamic obstacles such as people, which in turn affects the feasibility and effectiveness of navigation.
- The algorithm proposed in this paper has only been validated through simulation experiments and theoretical analysis, without fully considering the complexities of a real medical laboratory environment. As medical testing laboratories require high stability of mobile robots, it is necessary to deploy the improved algorithm to mobile robots in real medical testing laboratories to further verify its reliability and stability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, H.; Shi, P.; Zhao, Y. Adaptive connected hierarchical optimization algorithm for minimum energy spacecraft attitude maneuver path planning. Astrodynamics 2023, 7, 197–209. [Google Scholar] [CrossRef]
- Han, J.; Seo, Y. Mobile robot path planning with surrounding point set and path improvement. Appl. Soft Comput. 2017, 57, 35–47. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; ACM: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S. Rapidly-exploring random trees: A new tool for path planning. Res. Rep. 1998, 9811. [Google Scholar]
- Warren, C.W. Global path planning using artificial potential fields. In Proceedings of the 1989 IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 316–321. [Google Scholar]
- Liu, H.; Zhang, Y. ASL-DWA: An Improved A-Star Algorithm for Indoor Cleaning Robots. IEEE Access 2022, 10, 99498–99515. [Google Scholar] [CrossRef]
- Wang, Y.; Geng, Q.; Fei, Q.; Wang, B.; Zhao, D. An Improved A-Star Algorithm for Global Path Planning of Unmanned Surface Vehicle. In Proceedings of the 2023 42nd Chinese Control Conference (CCC), Tianjin, China, 24–26 July 2023; pp. 1–6. [Google Scholar]
- Zhang, J.; Wu, J.; Shen, X.; Li, Y. Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211042730. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Zhang, S. Path Planning of Robots Based on an Improved A-star Algorithm. In Proceedings of the 2022 IEEE 5th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 16–18 December 2022; pp. 826–831. [Google Scholar]
- Fransen, K.; Van Eekelen, J.; Pogromsky, A.; Boon, M.A.; Adan, I.J. A dynamic path planning approach for dense, large, grid-based automated guided vehicle systems. Comput. Oper. Res. 2020, 123, 105046. [Google Scholar] [CrossRef]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Candeloro, M.; Lekkas, A.M.; Sørensen, A.J. A Voronoi-diagram-based dynamic path-planning system for underactuated marine vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar] [CrossRef]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Zhang, H.; Tao, Y.; Zhu, W. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-Star Algorithm. Sensors 2023, 23, 6647. [Google Scholar] [CrossRef] [PubMed]
- Park, H.; Lee, J.-H. B-spline curve fitting based on adaptive curve refinement using dominant points. Comput.-Aided Des. 2007, 39, 439–451. [Google Scholar] [CrossRef]
- Xiang, D.; Lin, H.; Ouyang, J.; Huang, D. Combined improved A* and greedy algorithm for path planning of multi-objective mobile robot. Sci. Rep. 2022, 12, 13273. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Hou, J.; Chen, G. Improved safety-first A-star algorithm for autonomous vehicles. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020; pp. 706–710. [Google Scholar]
- XiangRong, T.; Yukun, Z.; XinXin, J. Improved A-star algorithm for robot path planning in static environment. J. Phys. Conf. Ser. 2021, 1792, 012067. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M.; Jazar, R. Randomized bidirectional B-spline parameterization motion planning. IEEE Trans. Intell. Transp. Syst. 2015, 17, 406–419. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance Formula | Number of Search Nodes | Number of Turns | Path Length/m | Time/s |
|---|---|---|---|---|
| Manhattan distance | 67 | 5 | 50.7 | 2.6 |
| Euler distance | 435 | 9 | 50.7 | 25.8 |
| Chebyshev distance | 447 | 11 | 50.7 | 27.4 |
| Coordinates of Start and Goal Points | Method | Number of Search Nodes | Improving Ratio | Number of Turns | Improving Ratio | Path Length/m | Improving Ratio | Time/s | Improving Ratio |
|---|---|---|---|---|---|---|---|---|---|
| (3, 1) (28, 29) | Traditional A-star algorithm | 231 | 5 | 53.2 | 10.5 | ||||
| Bidirectional A-star algorithm | 161 | 30.3% | 9 | −80% | 54.1 | −1.7% | 6.7 | 36.2% | |
| Improved A-star algorithm | 92 | 60.2% | 13 | −160% | 51.1 | 3.9% | 3.8 | 63.8% | |
| (28, 2) (3, 28) | Traditional A-star algorithm | 153 | 8 | 49.1 | 6.0 | ||||
| Bidirectional A-star algorithm | 129 | 15.7% | 12 | −50% | 47.4 | 3.5% | 5.1 | 15% | |
| Improved A-star algorithm | 86 | 43.8% | 10 | −25% | 47.4 | 3.5% | 3.9 | 35% |
| Coordinates of Start and Goal Points | Method | Number of Search Nodes | Improving Ratio | Number of Turns | Improving Ratio | Path Length/m | Improving Ratio | Time/s | Improving Ratio |
|---|---|---|---|---|---|---|---|---|---|
| (1, 1) (49, 49) | Traditional A-star algorithm | 139 | 9 | 87.2 | 5.6 | ||||
| Bidirectional A-star algorithm | 275 | −97.8% | 9 | 87.2 | 14.5 | −158.9% | |||
| Improved A-star algorithm | 98 | 29.5% | 10 | −11.1% | 84.2 | 3.4% | 4.8 | 14.3% | |
| (49, 1) (1, 49) | Traditional A-star algorithm | 153 | 7 | 88.4 | 6.0 | ||||
| Bidirectional A-star algorithm | 129 | 15.7% | 12 | −71.4% | 93.4 | −5.7% | 5.1 | 15% | |
| Improved A-star algorithm | 86 | 43.8% | 10 | −42.9% | 85.6 | 3.2% | 3.9 | 35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, C.; Tan, C.; Wang, C.; Shen, F. An Improved A-Star Path Planning Algorithm Based on Mobile Robots in Medical Testing Laboratories. Sensors 2024, 24, 1784. https://doi.org/10.3390/s24061784
Yin C, Tan C, Wang C, Shen F. An Improved A-Star Path Planning Algorithm Based on Mobile Robots in Medical Testing Laboratories. Sensors. 2024; 24(6):1784. https://doi.org/10.3390/s24061784
Chicago/Turabian StyleYin, Chengpeng, Chunyu Tan, Chongqin Wang, and Feng Shen. 2024. "An Improved A-Star Path Planning Algorithm Based on Mobile Robots in Medical Testing Laboratories" Sensors 24, no. 6: 1784. https://doi.org/10.3390/s24061784
APA StyleYin, C., Tan, C., Wang, C., & Shen, F. (2024). An Improved A-Star Path Planning Algorithm Based on Mobile Robots in Medical Testing Laboratories. Sensors, 24(6), 1784. https://doi.org/10.3390/s24061784