
Self-Mixing Interferometer for Acoustic Measurements through Vibrometric Calibration


Abstract
1. Introduction
2. Theory
2.1. The Acousto-Optic Effect
2.2. The Self-Mixing Interferometer
2.2.1. Optical Path
2.2.2. Round-Trip Phase
2.2.3. Feedback Parameter C
2.2.4. LD Power and SMI Signal U
2.3. Relationship between C, and U Signal Shape in Moderate and Strong Feedback Regime
3. Simulation of the Calibration Method
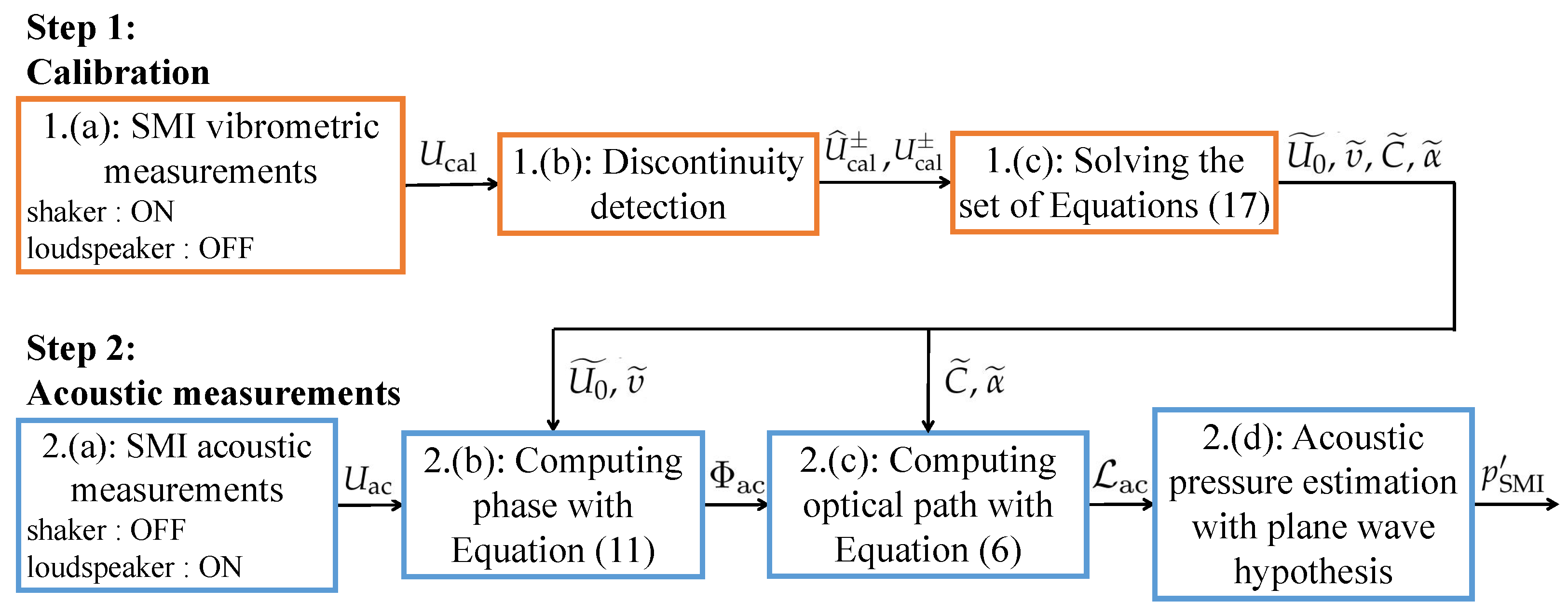
- Calibration:
- (a)
- Measurement of a vibrometric signal U with discontinuities,
- (b)
- Estimation of and from the SMI signal U,
- (c)
- Solving the set of Equations (17) to estimate , , C and .
- Measurement:
4. Experiments
4.1. Experimental Setup
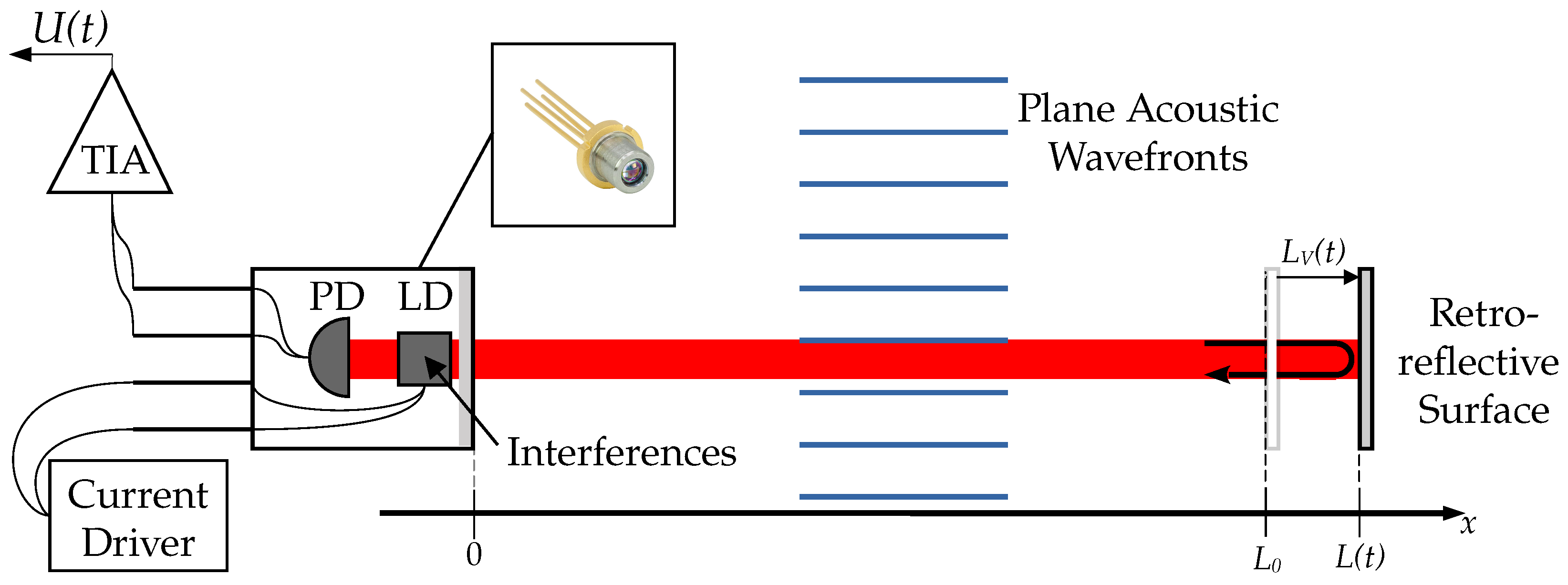
4.1.1. The SMI
4.1.2. The Acoustic Source
4.2. Protocol
- Calibration:
- (a)
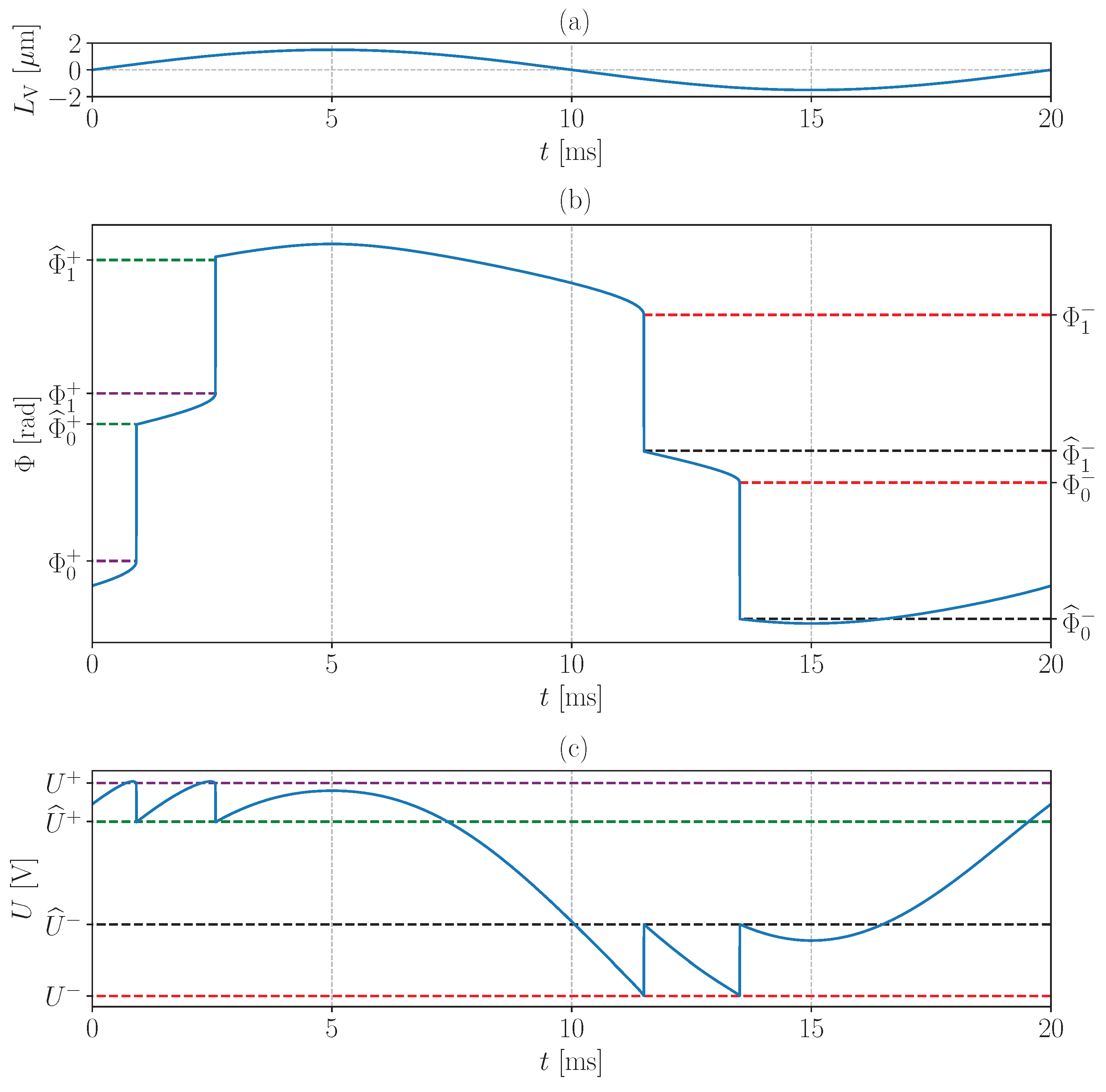
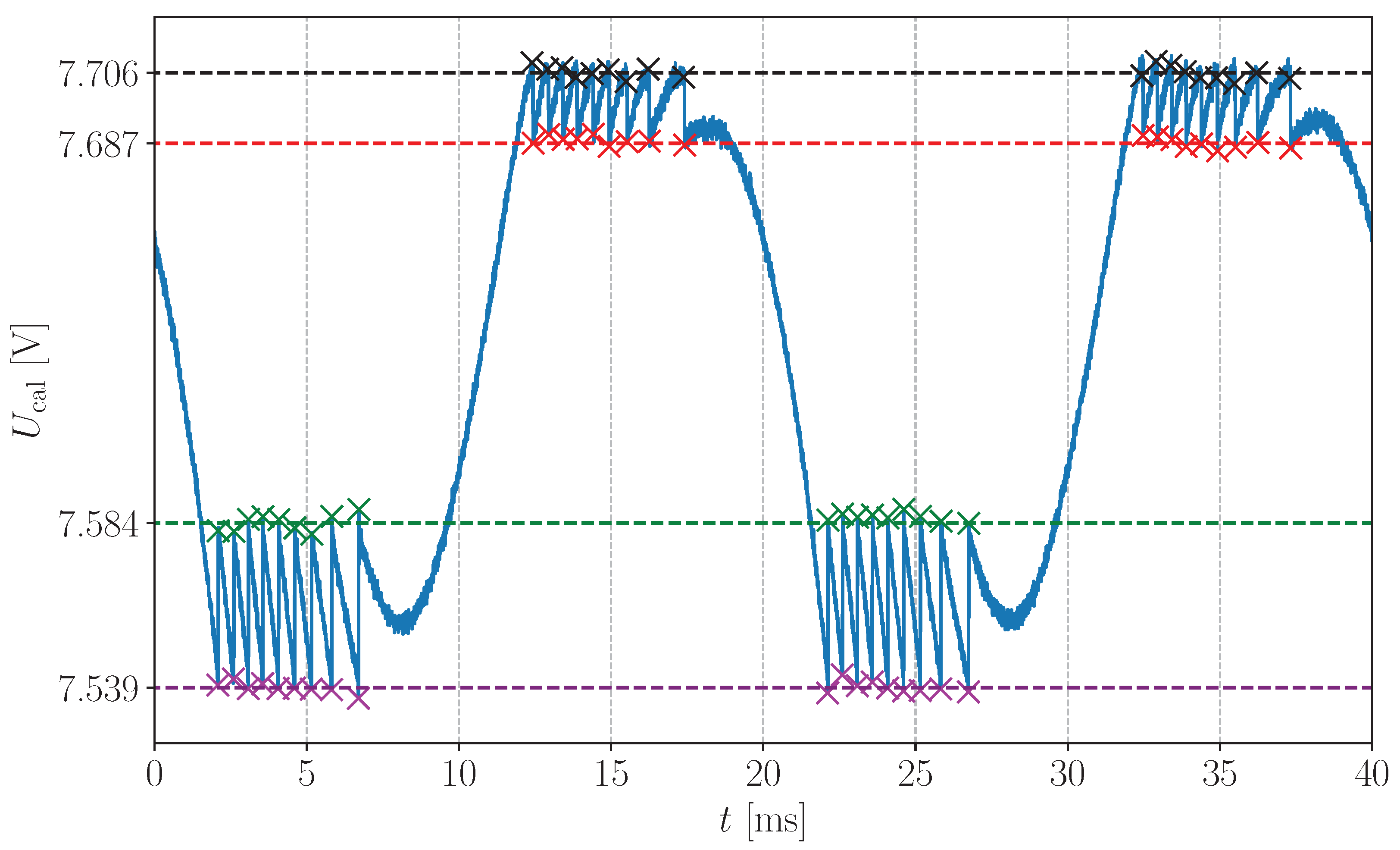
- The SMI is targeting a retro-reflective tape mounted on a shaker through the acoustic waveguide. During this step, no acoustic wave propagates in the waveguide and in Equation (5). The displacement is generated by the shaker driven sinusoidally at 50 Hz, as in Section 3. Its amplitude is set large enough to produce a SMI signal, denoted , with around ten discontinuities per period. is acquired for 2 seconds at a sampling rate of 200 kHz in order to measure 100 periods. An example of measured signal is shown in Figure 6.
- (b)
- and are estimated by averaging the ordinate of the points directly before and after each discontinuity as illustrated in Figure 6. This allows to reduce the impact of noise. As in Section 3, the points used for the averaging are estimated by computing the derivative of and by using a peak detection algorithm.
- (c)
- , , and are estimated by solving the set of Equation (17) with the Python function fsolve from the scipy.optimize library with a tolerance of .
- Acoustic measurements:
- (a)
- After calibration, the SMI alignment is not modified to avoid any change in the values of C, and . Then, the shaker is turned off and the loudspeaker is driven with a sinusoidal signal tuned to one of the waveguide resonant frequencies in order to obtain a high SNR. The resulting SMI signal is denoted . For each acquisition, by varying the sampling rate, one thousand consecutive samples of , and are acquired to capture 100 periods of the acoustic wave with 10 samples per period.
- (b)
- is estimated from with , and Equation (11).
- (c)
- is estimated from with , and Equation (6).
- (d)
- Then, is computed with Equation (5) by taking into account only the alternative component (AC) of . Despite that the shaker is turned off, mechanical vibrations may occur during acoustic measurements. To compensate for length variations in , is estimated from the accelerometer signals after two temporal integrations and subtracted from . Finally, the acoustic pressure in the waveguide denoted , is computed using and Equation (19).
5. Results and Discussions
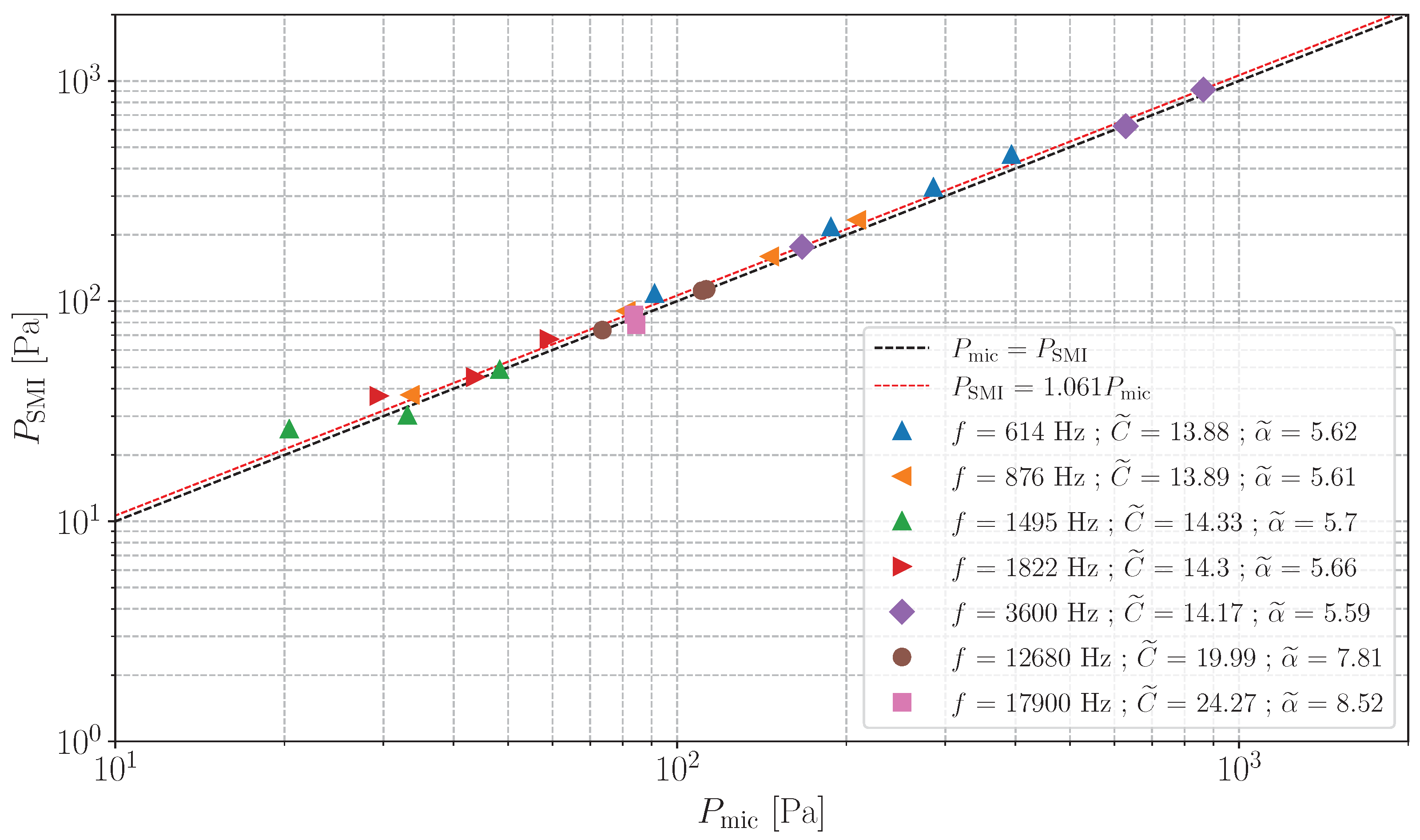
5.1. SMI and Microphonic Measurements Comparison
5.2. Repeating the Protocol for Different Values of C
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SMI | Self-Mixing Interferometer |
| LD | Laser Diode |
| PD | Photodide |
| TIA | TransImpedance Amplifier |
| SNR | Signal-to-noise Ration |
| SPL | Sound Pressure Level |
Appendix A. Acoustic Pressure along the Laser Beam with Waveguide Side Holes Radiation
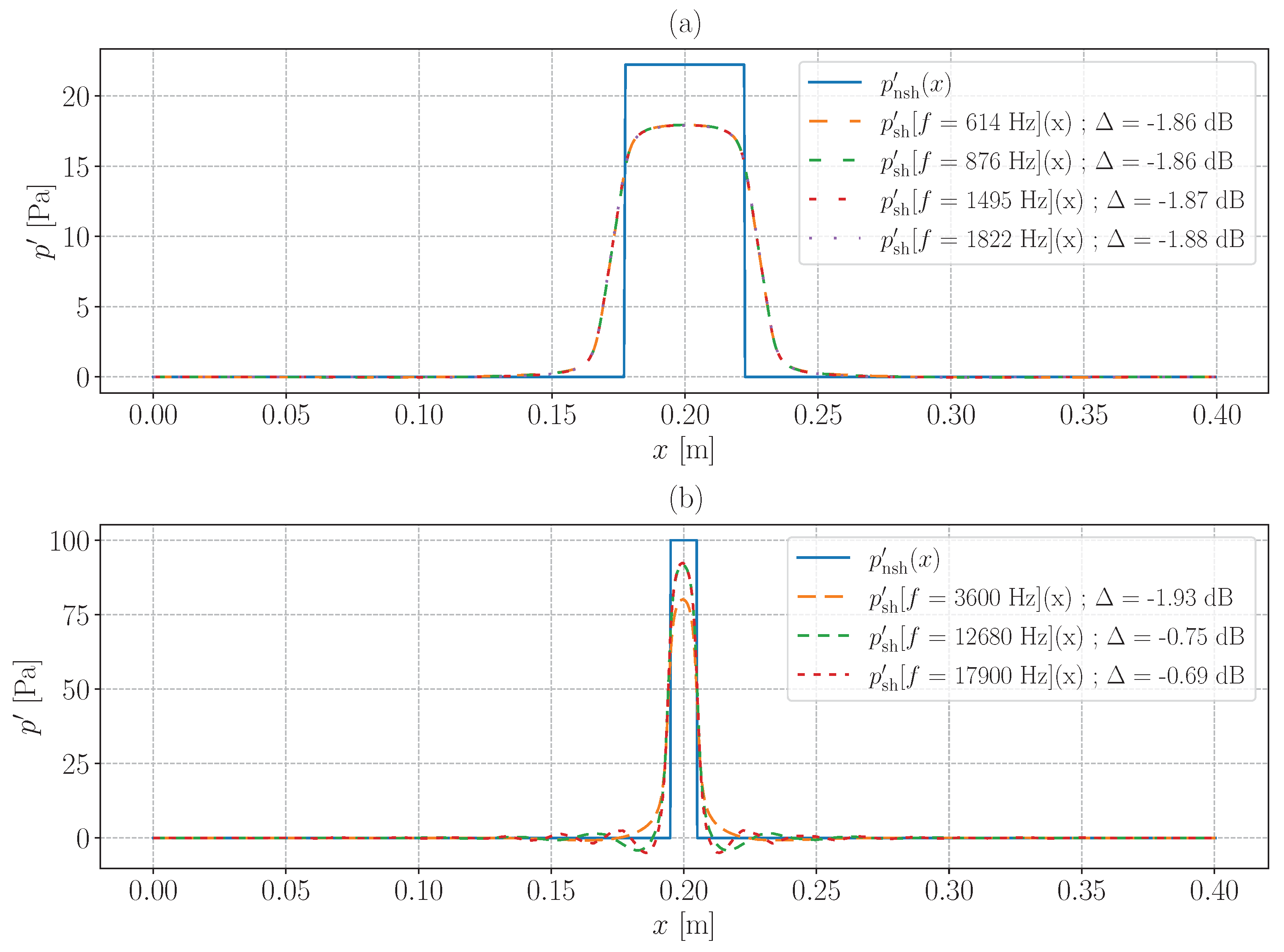
- In the case of a plane wave hypothesis (see Equation (19)) with no side holes radiation. This pressure is denoted (where subscript “nsh” stands for “no side holes radiation”).
- In the case where side holes radiations are taken into account. The acoustic pressure is numerically simulated for each frequency f of Figure 7, using COMSOL©, by solving the Helmholtz equation with a finite element method [43]. The simulations are carried out with the geometric parameters of Table 1 and the acoustic source is modelled by a 1 m/s velocity source placed at one extremity of the waveguide. From the resulting acoustic pressure, one obtained (where subscript “sh” stands for “side holes radiation”) such as:
References
- Halliwell, N. Laser-Doppler Measurement of Vibrating Surfaces: A Portable Instrument. J. Sound Vib. 1979, 62, 312–315. [Google Scholar] [CrossRef]
- Connelly, M.J.; Galeti, J.H.; Kitano, C. Michelson interferometer vibrometer using self-correcting synthetic-heterodyne demodulation. Appl. Opt. 2015, 54, 5734–5738. [Google Scholar] [CrossRef] [PubMed]
- Donati, S.; Giuliani, G.; Merlo, S. Laser diode feedback interferometer for measurement of displacements without ambiguity. IEEE J. Quantum Electron. 1995, 31, 113–119. [Google Scholar] [CrossRef]
- Zipser, L.; Franke, H.H. Refracto-vibrometry—A novel method for visualizing sound waves in transparent media. J. Acoust. Soc. Am. 2008, 123, 3314. [Google Scholar] [CrossRef]
- Ishikawa, K.; Shiraki, Y.; Moriya, T.; Ishizawa, A.; Hitachi, K.; Oguri, K. Low-noise optical measurement of sound using midfringe locked interferometer with differential detection. J. Acoust. Soc. Am. 2021, 150, 1514–1523. [Google Scholar] [CrossRef]
- Maisto, P.; Martin, N.C.; Francis, A.; Laurence, S.J.; Papadopoulos, G. Characterization of High-Frequency Acoustic Sources Using Laser Differential Interferometry. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 & 19–21 January 2021. [Google Scholar] [CrossRef]
- Yuldashev, P.; Karzova, M.; Khokhlova, V.; Ollivier, S.; Blanc-Benon, P. Mach-Zehnder interferometry method for acoustic shock wave measurements in air and broadband calibration of microphones. J. Acoust. Soc. Am. 2015, 137, 3314–3324. [Google Scholar] [CrossRef]
- Lecomte, P.; Leclère, Q.; Ollivier, S. Equivalent source model from acousto-optic measurements and application to an acoustic pulse characterization. J. Sound Vib. 2019, 450, 141–155. [Google Scholar] [CrossRef]
- Bertling, K.; Veidt, M.; Perchoux, J.; Rakić, A.D. Imaging elastic waves in solids: How to use laser feedback interferometry to visualize them. Opt. Express 2023, 31, 32761–32771. [Google Scholar] [CrossRef]
- Petermann, K. Laser Diode Modulation and Noise; Springer: Dordrecht, The Netherlands, 1988; Chapter 9. [Google Scholar] [CrossRef]
- Lang, R.; Kobayashi, K. External optical feedback effects on semiconductor injection laser properties. IEEE J. Quantum Electron. 1980, 16, 347–355. [Google Scholar] [CrossRef]
- Bertling, K.; Perchoux, J.; Taimre, T.; Malkin, R.; Robert, D.; Rakić, A.D.; Bosch, T. Imaging of acoustic fields using optical feedback interferometry. Opt. Express 2014, 22, 30346. [Google Scholar] [CrossRef]
- Knudsen, E.; Perchoux, J.; Mazoyer, T.; Jayat, F.; Tronche, C.; Bosch, T. Lower detection limit of the acousto-optic effect using Optical Feedback Interferometry. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Chanu–Rigaldies, S.; Lecomte, P.; Ollivier, S.; Castelain, T. Sensitivity of an optical feedback interferometer for acoustic waves measurements. JASA Express Lett. 2023, 3, 102801. [Google Scholar] [CrossRef]
- Beheim, G.; Fritsch, K. Range finding using frequency-modulated laser diode. Appl. Opt. 1986, 25, 1439–1442. [Google Scholar] [CrossRef]
- Giuliani, G.; Norgia, M.; Donati, S.; Bosch, T. Laser diode self-mixing technique for sensing applications. J. Opt. Pure Appl. Opt. 2002, 4, S283–S294. [Google Scholar] [CrossRef]
- Fan, Y.; Yu, Y.; Xi, J.; Chicharo, J.F.; Ye, H. A displacement reconstruction algorithm used for optical feedback self mixing interferometry system under different feedback levels. In Optical Metrology and Inspection for Industrial Applications; Harding, K., Huang, P.S., Yoshizawa, T., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2010; Volume 7855, p. 78550L. [Google Scholar] [CrossRef]
- Urgiles Ortiz, P.F.; Perchoux, J.; Arriaga, A.L.; Jayat, F.; Bosch, T. Visualization of an acoustic stationary wave by optical feedback interferometry. Opt. Eng. 2018, 57, 1. [Google Scholar] [CrossRef]
- Maqueda, S.; Perchoux, J.; Tronche, C.; Imas González, J.J.; Genetier, M.; Lavayssière, M.; Barbarin, Y. Demonstration of Pressure Wave Observation by Acousto-Optic Sensing Using a Self-Mixing Interferometer. Sensors 2023, 23, 3720. [Google Scholar] [CrossRef]
- Henry, C. Theory of the linewidth of semiconductor lasers. IEEE J. Quantum Electron. 1982, 18, 259–264. [Google Scholar] [CrossRef]
- Acket, G.; Lenstra, D.; Den Boef, A.; Verbeek, B. The influence of feedback intensity on longitudinal mode properties and optical noise in index-guided semiconductor lasers. IEEE J. Quantum Electron. 1984, 20, 1163–1169. [Google Scholar] [CrossRef]
- Tkach, R.; Chraplyvy, A. Regimes of feedback effects in 1.5-µm distributed feedback lasers. J. Light. Technol. 1986, 4, 1655–1661. [Google Scholar] [CrossRef]
- Ahmed, I.; Zabit, U. Fast estimation of feedback parameters for a self-mixing interferometric displacement sensor. In Proceedings of the 2017 International Conference on Communication, Computing and Digital Systems (C-CODE), Islamabad, Pakistan, 8–9 March 2017; pp. 407–411. [Google Scholar] [CrossRef]
- Kim, C.H. Effect of linewidth enhancement factor on displacement reconstruction and immediate estimation of feedback factor for weak feedback. Opt. Commun. 2020, 461, 125203. [Google Scholar] [CrossRef]
- Liu, B.; Ruan, Y.; Yu, Y. Determining System Parameters and Target Movement Directions in a Laser Self-Mixing Interferometry Sensor. Photonics 2022, 9, 612. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, K.; Ren, G.; Du, Z.; Yu, Q.; Li, H.; Tu, G.; Xu, F.; Hu, Z.; Lu, L. A new measurement method for the optical feedback coupling factor and linewidth enhancement factor based on self-mixing interferometry. Opt. Lasers Eng. 2022, 158, 107166. [Google Scholar] [CrossRef]
- Yu, Y.; Giuliani, G.; Donati, S. Measurement of the Linewidth Enhancement Factor of Semiconductor Lasers Based on the Optical Feedback Self-Mixing Effect. IEEE Photonics Technol. Lett. 2004, 16, 990–992. [Google Scholar] [CrossRef]
- Bes, C.; Plantier, G.; Bosch, T. Displacement Measurements Using a Self-Mixing Laser Diode Under Moderate Feedback. IEEE Trans. Instrum. Meas. 2006, 55, 1101–1105. [Google Scholar] [CrossRef]
- Fan, Y.; Yu, Y.; Xi, J.; Chicharo, J.F. Improving the measurement performance for a self-mixing interferometry-based displacement sensing system. Appl. Opt. 2011, 50, 5064. [Google Scholar] [CrossRef] [PubMed]
- Orakzai, M.S.; Amin, S.; Khan, Z.A.; Akram, F. Fast and highly accurate estimation of feedback coupling factor and linewidth enhancement factor for displacement sensing under different feedback regimes. Opt. Commun. 2022, 508, 127751. [Google Scholar] [CrossRef]
- Khan, J.I.; Zabit, U. Deformation Method of Self-Mixing Laser Sensor’s Feedback Phase for Estimation of Optical Feedback Coupling Factor and Displacement. IEEE Sens. J. 2021, 21, 7490–7497. [Google Scholar] [CrossRef]
- Ri, C.M.; Kim, C.H.; Oh, Y.N.; Kim, S.C. Immediate estimation of feedback factor and linewidth enhancement factor from measured self-mixing signals under moderate or strong regime. Meas. Sci. Technol. 2020, 31, 065204. [Google Scholar] [CrossRef]
- Yu, Y.; Xi, J.; Chicharo, J.F. Measuring the feedback parameter of a semiconductor laser with external optical feedback. Opt. Express 2011, 19, 9582. [Google Scholar] [CrossRef] [PubMed]
- An, L.; Liu, B. Measuring parameters of laser self-mixing interferometry sensor based on back propagation neural network. Opt. Express 2022, 30, 19134. [Google Scholar] [CrossRef] [PubMed]
- Hong, H.S.; Kim, C.H.; Kim, J.H.; Song, U.H.; Li, H.S.; Mun, K.I. High-speed joint estimation of for strong feedback regime with fringe loss. Opt. Commun. 2020, 474, 126161. [Google Scholar] [CrossRef]
- Ciddor, P.E. Refractive index of air: New equations for the visible and near infrared. Appl. Opt. 1996, 35, 1566. [Google Scholar] [CrossRef] [PubMed]
- Ciddor, P.E. Refractive index of air: 3. The roles of CO2, H2O, and refractivity virials. Appl. Opt. 2002, 41, 2292. [Google Scholar] [CrossRef] [PubMed]
- Kliese, R.; Taimre, T.; Bakar, A.A.A.; Lim, Y.L.; Bertling, K.; Nikolić, M.; Perchoux, J.; Bosch, T.; Rakić, A.D. Solving self-mixing equations for arbitrary feedback levels: A concise algorithm. Appl. Opt. 2014, 53, 3723. [Google Scholar] [CrossRef] [PubMed]
- Kane, D.M.; Shore, K.A. (Eds.) Unlocking Dynamical Diversity: Optical Feedback Effects on Semiconductor Lasers, 1st ed.; Wiley: Hoboken, NJ, USA, 2005; Chapter 7; p. 222. [Google Scholar] [CrossRef]
- Yu, Y.; Xi, J.; Chicharo, J.F.; Bosch, T.M. Optical Feedback Self-Mixing Interferometry With a Large Feedback Factor C: Behavior Studies. IEEE J. Quantum Electron. 2009, 45, 840–848. [Google Scholar] [CrossRef]
- Björck, Å. Numerical Methods for Least Squares Problems; SIAM Soc. for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996; Chapter 9. [Google Scholar]
- Blackstock, D. Fundam. Phys. Acoust.; Wiley: Hoboken, NJ, USA, 2000; Chapter 12; pp. 421–424. [Google Scholar]
- Harris, F.E. Mathematics for Physical Science and Engineering; Academic Press: Boston, MA, USA, 2014; Chapter 15; pp. 545–591. [Google Scholar] [CrossRef]
- Wilson, G.P.; Soroka, W.W. Approximation to the Diffraction of Sound by a Circular Aperture in a Rigid Wall of Finite Thickness. J. Acoust. Soc. Am. 1965, 37, 286–297. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave-Guide No. | (mm) | Side Holes Diameter D (mm) | (mm) | Wall Thickness e (mm) | Cut-Off Frequency (kHz) [42] | Loud-Speaker Model | Microphone Model |
|---|---|---|---|---|---|---|---|
| 1 | 6 | 430 | 10 | 3.5 | Audax© AM130RL0 (Paris, France) | 1/4” B&K© 4939 | |
| 2 | 3 | 170 | 1 | 18 | Eminence© APT80 (Eminence, KT, USA) | 1/8” GRAS© 40DP (Holte, Denmark) |
| [Pa] | [Pa] | [dB] | ||
|---|---|---|---|---|
| 10 | 7.1 | 6.5 | 11.3 | 1.1 |
| 9.0 | 6.3 | 9.4 | −0.5 | |
| 11.5 | 6.2 | 12.8 | 2.1 | |
| 16.6 | 6.3 | 9.7 | −0.3 | |
| 21.3 | 6.6 | 10.3 | 0.3 | |
| 53 | 7.0 | 6.0 | 60.6 | 1.2 |
| 7.7 | 5.8 | 60.7 | 1.2 | |
| 9.9 | 6.3 | 58.0 | 0.8 | |
| 15.3 | 6.5 | 54.2 | 0.2 | |
| 21.5 | 6.8 | 59.2 | 1.0 | |
| 400 | 7.4 | 6.2 | 468 | 1.4 |
| 8.0 | 6.1 | 449 | 1.0 | |
| 10.5 | 6.1 | 429 | 0.6 | |
| 15.3 | 6.2 | 451 | 1.0 | |
| 19.2 | 6.7 | 453 | 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chanu-Rigaldies, S.; Lecomte, P.; Ollivier, S.; Castelain, T. Self-Mixing Interferometer for Acoustic Measurements through Vibrometric Calibration. Sensors 2024, 24, 1777. https://doi.org/10.3390/s24061777
Chanu-Rigaldies S, Lecomte P, Ollivier S, Castelain T. Self-Mixing Interferometer for Acoustic Measurements through Vibrometric Calibration. Sensors. 2024; 24(6):1777. https://doi.org/10.3390/s24061777
Chicago/Turabian StyleChanu-Rigaldies, Simon, Pierre Lecomte, Sébastien Ollivier, and Thomas Castelain. 2024. "Self-Mixing Interferometer for Acoustic Measurements through Vibrometric Calibration" Sensors 24, no. 6: 1777. https://doi.org/10.3390/s24061777
APA StyleChanu-Rigaldies, S., Lecomte, P., Ollivier, S., & Castelain, T. (2024). Self-Mixing Interferometer for Acoustic Measurements through Vibrometric Calibration. Sensors, 24(6), 1777. https://doi.org/10.3390/s24061777