
Blind Calibration of Environmental Acoustics Measurements Using Smartphones


Abstract
1. Introduction
2. Methodology
2.1. The Problem of the Acoustic Calibration of Smartphones on a Large Scale
2.1.1. General Considerations about Smartphone Acoustic Calibration
2.1.2. Smartphone Calibration with NoiseCapture
2.1.3. Mass Calibration vs. Individual Calibration of Smartphones
2.2. NoiseCapture Application and Database
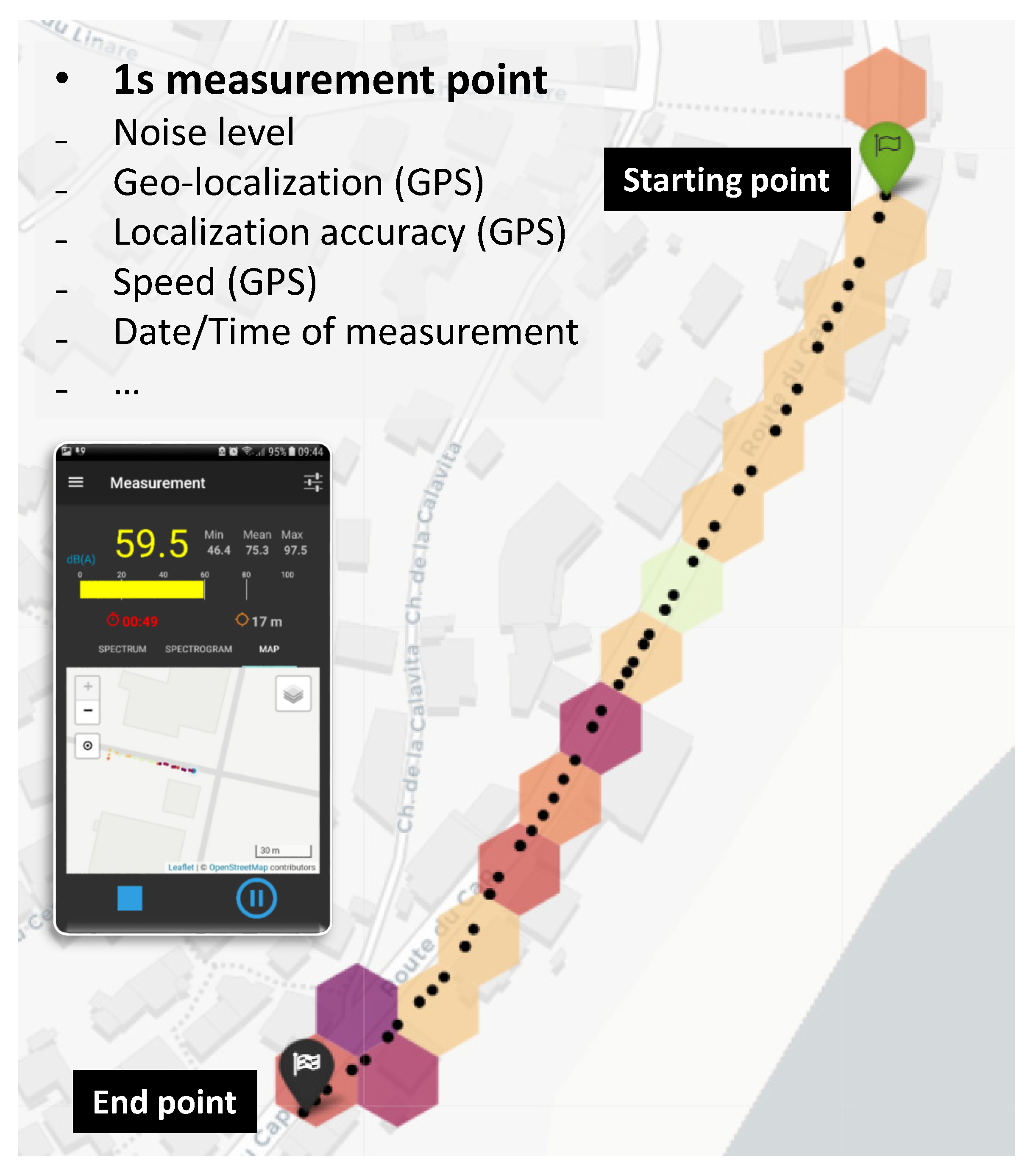
2.2.1. Application Principle
2.2.2. Database and Privacy Policy
2.3. Blind Calibration Model
2.3.1. Natural Graph Model
2.3.2. Simple Mean Model
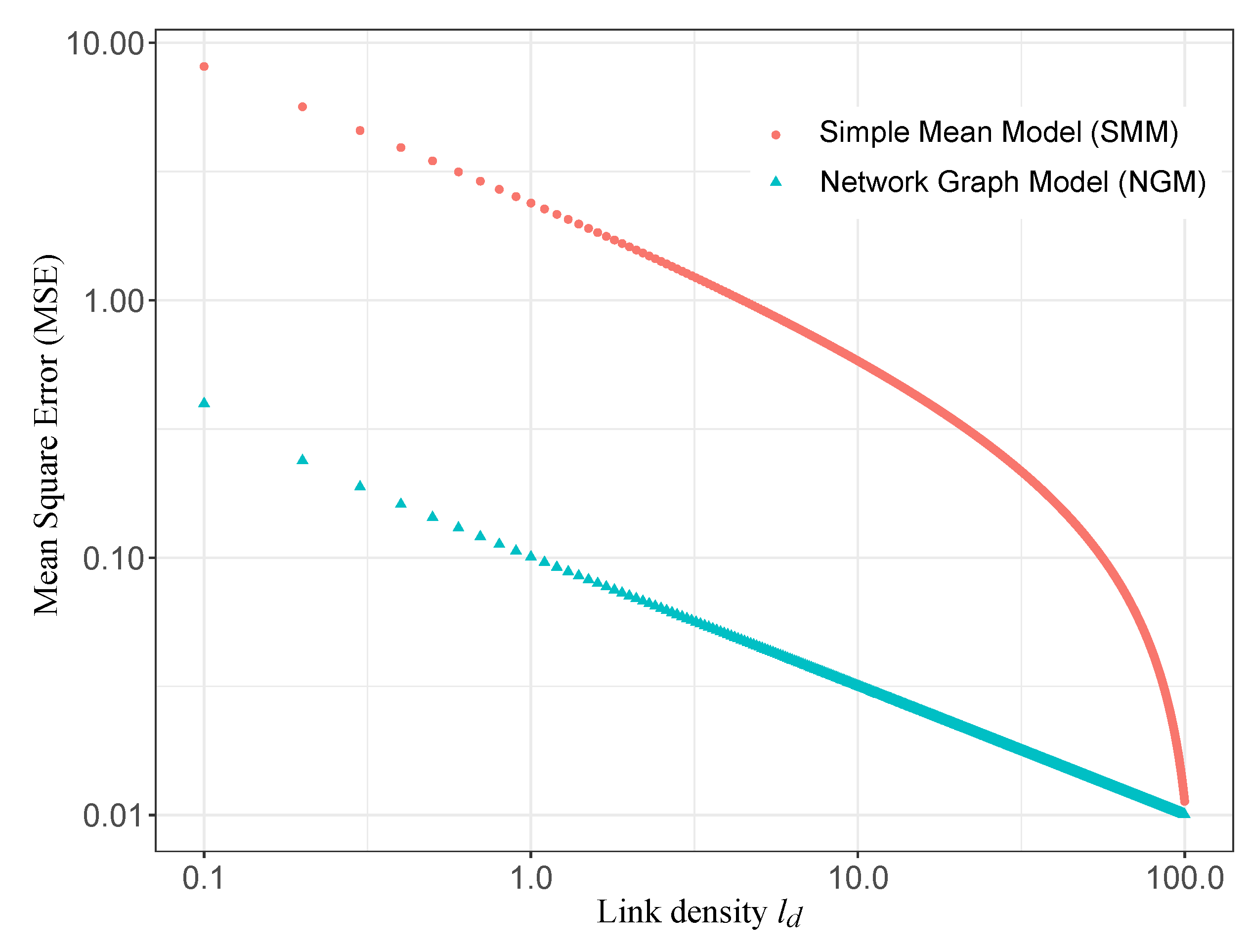
2.3.3. Validation of the NGM Implementation
3. Application of the NGM to a Mobile Acoustic Dataset
3.1. Discussion of NGM Application Assumptions
3.1.1. NGM Mathematical Assumptions
- First assumption: the drift d of a given sensor is stationary over time. In principle, the variation of drift over time of a professional microphone is small, especially with respect to its impact on measured noise indicators. A smartphone microphone, on the other hand, is exposed to numerous constraints that may partially modify its acoustic characteristics over time. To our knowledge, there is no published study on the acoustic monitoring of smartphones over time, at least for environmental acoustics applications, but our experience within the NoiseCapture project has not revealed any anomalies on this subject. Moreover, considering the rapid change in the smartphone fleet, the assumption of stationarity over a short or medium time period seems quite acceptable. In the event of a full deterioration of the smartphone microphone, following an accident, for example, the smartphone will become unusable for its primary function, and it is likely that it will no longer be used to collect data.
- Second assumption: the average value of drifts d on all sensors is null. The average value of all known calibration values in the NoiseCapture database, if we exclude calibration values at zero (default value in the absence of calibration), is of the order of dB, i.e., close to zero. This hypothesis, therefore, seems globally acceptable. It is important to note first of all that this assumption is introduced by the authors to ensure the uniqueness condition of the solution of Equation (6) [34]. The assumption can therefore be discussed but is, in any case, required in the approach.
- Third assumption: the noise vector is small in front of for a large number of sensors. It is difficult to quantify the error introduced by external conditions or insufficient control of the measurement protocol (noise generated by the operator, bad holding of the smartphone, effect of the wind on the microphone, etc.). However, one can consider that this noise is negligible in comparison with the measurement, and that it can be assimilated to a white noise.
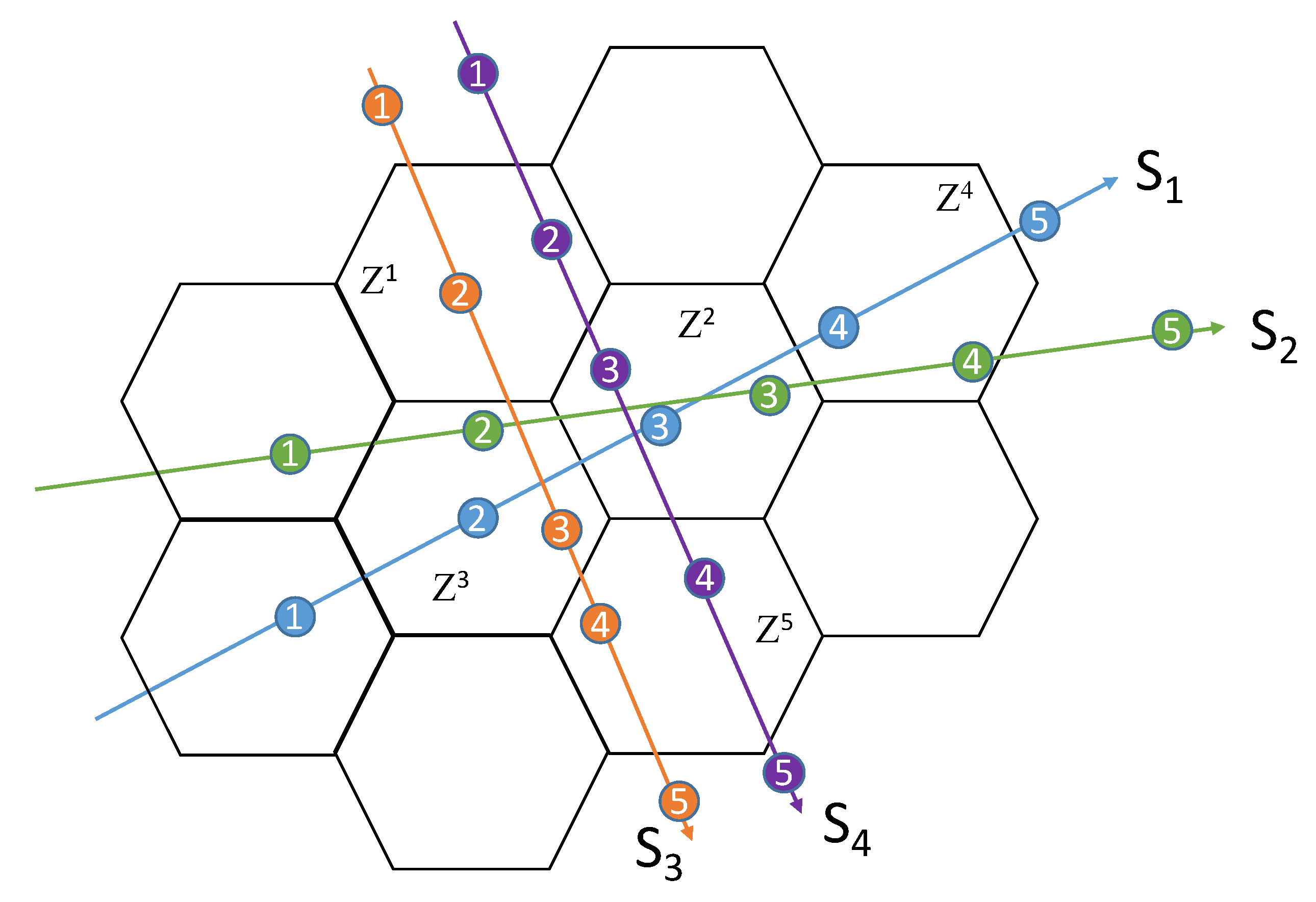
3.1.2. Sensor Definition in the Context of a Mobile Acoustic Measurement
3.1.3. Assumption of Simultaneous Measurements between Two Sensors
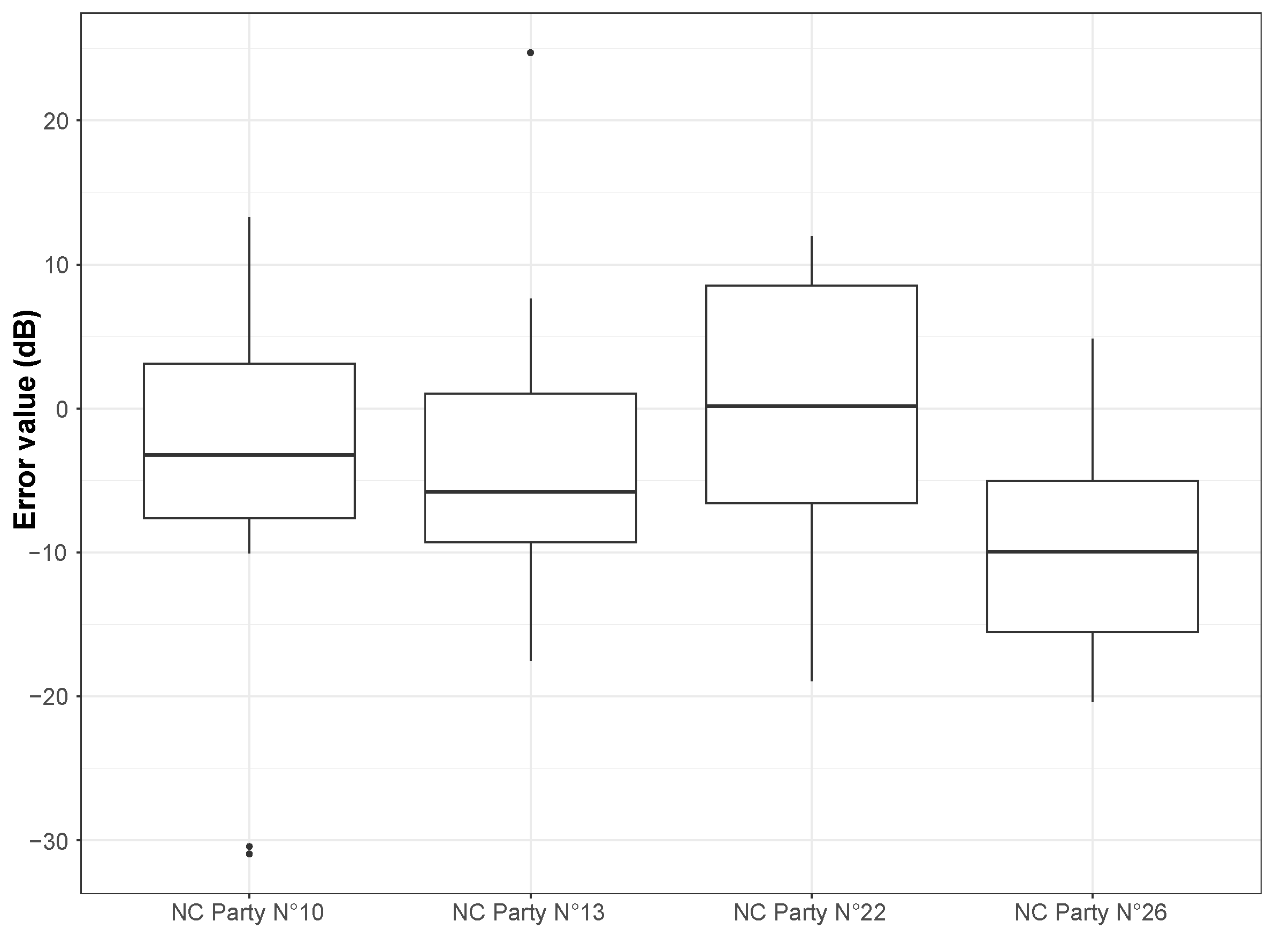
3.2. Comparison with Reference Datasets: NoiseCapture Parties
3.3. Hybrid NGM-SMM
3.4. Effect of the Size of the Spatial Area on the Hybrid Method
3.5. Comparison with Large Realistic Dataset: City of Rezé (France)
3.5.1. Description of the Dataset
3.5.2. Time Slot Variability for a Rendezvous
3.5.3. Qualitative Results
- The noise map (in dBA) produced with the initial calibration values (‘Initial’ noise map, Figure 12a). It considers only data for smartphones with an initial calibration (134 pairs).
- The noise map (in dBA) obtained by applying the blind calibration, using the hybrid method with a minimum threshold of 100 links per smartphone, but only for the smartphones that were initially calibrated (‘Blind calibrated’ noise map, Figure 12b). In this case, 52.7% of smartphones were calibrated (54 using the NGM method and 53 using the SMM method), enabling 71.9% of measurement points to be corrected.
- The difference map (in dBA) between the Initial and the Blind calibrated noise maps (Figure 12c); this difference map is calculated on the basis of the differences in the sound level in each hexagon. This map is completed in Figure 13 by a representation of the distribution of sound level differences as a percentage of the total number of corresponding hexagons in the whole City of Rezé (8464 hexagons contain data on all 10,365 hexagons).
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Parlamient Directive 2002/49/EC of the European Parliament and of the Council of 25 June 2002 relating to the assessment and management of environmental noise—Declaration by the Commission in the Conciliation Committee on the Directive relating to the assessment and management of environmental noise. Off. J. 2022, L 189. Available online: http://data.europa.eu/eli/dir/2002/49/oj/eng (accessed on 13 July 2023).
- Can, A.; Dekoninck, L.; Botteldooren, D. Measurement network for urban noise assessment: Comparison of mobile measurements and spatial interpolation approaches. Appl. Acoust. 2014, 83, 32–39. [Google Scholar] [CrossRef]
- Maisonneuve, N.; Stevens, M.; Ochab, B. Participatory Noise Pollution Monitoring Using Mobile Phones. Inf. Polity 2010, 15, 51–71. [Google Scholar] [CrossRef]
- Kanjo, E. NoiseSPY: A Real-Time Mobile Phone Platform for Urban Noise Monitoring and Mapping. Mob. Netw. Appl. 2010, 15, 562–574. [Google Scholar] [CrossRef]
- D’Hondt, E.; Stevens, M.; Jacobs, A. Participatory noise mapping works! An evaluation of participatory sensing as an alternative to standard techniques for environmental monitoring. Pervasive Mob. Comput. 2013, 9, 681–694. [Google Scholar] [CrossRef]
- Guillaume, G.; Can, A.; Petit, G.; Fortin, N.; Palominos, S.; Gauvreau, B.; Bocher, E.; Picaut, J. Noise mapping based on participative measurements. Noise Mapp. 2016, 3, 140–156. [Google Scholar] [CrossRef]
- Brambilla, G.; Pedrielli, F. Smartphone-Based Participatory Soundscape Mapping for a More Sustainable Acoustic Environment. Sustainability 2020, 12, 7899. [Google Scholar] [CrossRef]
- Picaut, J.; Fortin, N.; Bocher, E.; Petit, G.; Aumond, P.; Guillaume, G. An open-science crowdsourcing approach for producing community noise maps using smartphones. Build. Environ. 2019, 148, 20–33. [Google Scholar] [CrossRef]
- Picaut, J.; Boumchich, A.; Bocher, E.; Fortin, N.; Petit, G.; Aumond, P. A Smartphone-Based Crowd-Sourced Database for Environmental Noise Assessment. Int. J. Environ. Res. Public Health 2021, 18, 7777. [Google Scholar] [CrossRef]
- Picaut, J.; Fortin, N.; Bocher, E.; Petit, G. Université Gustave Eiffel Online Repository for Research Data. NoiseCapture Data Extraction from August 29, 2017 until August 28, 2020 (3 Years). 2021. Available online: https://data.univ-gustave-eiffel.fr/dataset.xhtml?persistentId=doi:10.25578/J5DG3W (accessed on 13 July 2023).
- Noise-Planet Website. Exploit NoiseCapture Data. 2023. Available online: https://noise-planet.org/noisecapture_exploit_data.html (accessed on 13 July 2023).
- Noise-Planet Website. NoiseCapture Privacy Policy. 2022. Available online: https://noise-planet.org/NoiseCapture_privacy_policy.html (accessed on 13 July 2023).
- Zipf, L.; Primack, R.B.; Rothendler, M. Citizen scientists and university students monitor noise pollution in cities and protected areas with smartphones. PLoS ONE 2020, 15, e0236785. [Google Scholar] [CrossRef]
- Guillaume, G.; Aumond, P.; Bocher, E.; Can, A.; Ecotière, D.; Fortin, N.; Foy, C.; Gauvreau, B.; Petit, G.; Picaut, J. NoiseCapture smartphone application as pedagogical support for education and public awareness. J. Acoust. Soc. Am. 2022, 151, 3255–3265. [Google Scholar] [CrossRef]
- Lefevre, B.; Agarwal, R.; Issarny, V.; Mallet, V. Mobile crowd-sensing as a resource for contextualized urban public policies: A study using three use cases on noise and soundscape monitoring. Cities Health 2021, 5, 179–197. [Google Scholar] [CrossRef]
- Can, A.; Audubert, P.; Aumond, P.; Geisler, E.; Guiu, C.; Lorino, T.; Rossa, E. Framework for urban sound assessment at the city scale based on citizen action, with the smartphone application NoiseCapture as a lever for participation. Noise Mapp. 2023, 10, 20220166. [Google Scholar] [CrossRef]
- Kardous, C.A.; Shaw, P.B. Evaluation of smartphone sound measurement applications. J. Acoust. Soc. Am. 2014, 135, EL186–EL192. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, J.; Liu, L.; Tham, C.K. iCal: Intervention-free Calibration for Measuring Noise with Smartphones. In Proceedings of the 2015 IEEE 21st International Conference on Parallel and Distributed Systems (ICPADS), Melbourne, Australia, 14–17 December 2015; pp. 85–91. [Google Scholar] [CrossRef]
- Murphy, E.; King, E.A. Testing the accuracy of smartphones and sound level meter applications for measuring environmental noise. Appl. Acoust. 2016, 106, 16–22. [Google Scholar] [CrossRef]
- Ventura, R.; Mallet, V.; Issarny, V.; Raverdy, P.G.; Rebhi, F. Evaluation and calibration of mobile phones for noise monitoring application. J. Acoust. Soc. Am. 2017, 142, 3084–3093. [Google Scholar] [CrossRef] [PubMed]
- Nast, D.R.; Speer, W.S.; Prell, C.G.L. Sound level measurements using smartphone “apps”: Useful or inaccurate? Noise Health 2014, 16, 251. [Google Scholar] [CrossRef] [PubMed]
- Aumond, P.; Lavandier, C.; Ribeiro, C.; Boix, E.G.; Kambona, K.; D’Hondt, E.; Delaitre, P. A study of the accuracy of mobile technology for measuring urban noise pollution in large scale participatory sensing campaigns. Appl. Acoust. 2017, 117, 219–226. [Google Scholar] [CrossRef]
- Garg, S.; Lim, K.M.; Lee, H.P. An averaging method for accurately calibrating smartphone microphones for environmental noise measurement. Appl. Acoust. 2019, 143, 222–228. [Google Scholar] [CrossRef]
- Aumond, P.; Can, A.; Rey Gozalo, G.; Fortin, N.; Suárez, E. Method for in situ acoustic calibration of smartphone-based sound measurement applications. Appl. Acoust. 2020, 166, 107337. [Google Scholar] [CrossRef]
- Kardous, C.A.; Shaw, P.B. Evaluation of smartphone sound measurement applications (apps) using external microphones—A follow-up study. J. Acoust. Soc. Am. 2016, 140, EL327–EL333. [Google Scholar] [CrossRef]
- Roberts, B.; Kardous, C.; Neitzel, R. Improving the accuracy of smart devices to measure noise exposure. J. Occup. Environ. Hyg. 2016, 13, 840–846. [Google Scholar] [CrossRef] [PubMed]
- Celestina, M.; Hrovat, J.; Kardous, C.A. Smartphone-based sound level measurement apps: Evaluation of compliance with international sound level meter standards. Appl. Acoust. 2018, 139, 119–128. [Google Scholar] [CrossRef]
- Celestina, M.; Kardous, C.A.; Trost, A. Smartphone-based sound level measurement apps: Evaluation of directional response. Appl. Acoust. 2021, 171, 107673. [Google Scholar] [CrossRef]
- Can, A.; Guillaume, G.; Picaut, J. Cross-calibration of participatory sensor networks for environmental noise mapping. Appl. Acoust. 2016, 110, 99–109. [Google Scholar] [CrossRef]
- Pődör, A.; Szabó, S. Geo-tagged environmental noise measurement with smartphones: Accuracy and perspectives of crowdsourced mapping. Environ. Plan. Urban Anal. City Sci. 2021, 48, 2710–2725. [Google Scholar] [CrossRef]
- Miluzzo, E.; Lane, N.D.; Campbell, A.T.; Olfati-Saber, R. CaliBree: A self-calibration system for mobile sensor networks. In Distributed Computing in Sensor Systems; Nikoletseas, S.E., Chlebus, B.S., Johnson, D.B., Krishnamachari, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5067, pp. 314–331. [Google Scholar]
- Wang, C.; Ramanathan, P.; Saluja, K.K. Moments based blind calibration in mobile sensor networks. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; Volume 1–13, pp. 896–900. [Google Scholar] [CrossRef]
- Wang, C.; Ramanathan, P.; Saluja, K.K. Blindly Calibrating Mobile Sensors Using Piecewise Linear Functions. In Proceedings of the 2009 6th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (secon 2009), Rome, Italy, 22–26 June 2009; pp. 216–224. [Google Scholar]
- Lee, B.T.; Son, S.C.; Kang, K. A Blind Calibration Scheme Exploiting Mutual Calibration Relationships for a Dense Mobile Sensor Network. IEEE Sens. J. 2014, 14, 1518–1526. [Google Scholar] [CrossRef]
- Bocher, E.; Petit, G.; Picaut, J.; Fortin, N.; Guillaume, G. Collaborative noise data collected from smartphones. Data Brief 2017, 14, 498–503. [Google Scholar] [CrossRef]
- NoiseCapture App. NoiseCapture Privacy Policy (Short Version). 2017. Available online: https://github.com/Universite-Gustave-Eiffel/NoiseCapture/blob/master/app/src/main/assets/html/privacy_policy.html (accessed on 13 July 2023).
- Noise-Planet App. Localization Policy. 2021. Available online: https://github.com/Universite-Gustave-Eiffel/NoiseCapture/blob/master/app/src/main/assets/html/localisation_notice.html (accessed on 13 July 2023).
- Open Data Commons Open Database License (ODbL). 2011. Available online: https://opendatacommons.org/licenses/odbl/ (accessed on 13 July 2023).
- Whitehouse, K.; Culler, D. Calibration as Parameter Estimation in Sensor Networks. In Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, GA, USA, 28 September 2002; pp. 59–67. [Google Scholar] [CrossRef]
- Brocolini, L.; Lavandier, C.; Quoy, M.; Ribeiro, C.F. Measurements of acoustic environments for urban soundscapes: Choice of homogeneous periods, optimization of durations, and selection of indicators. J. Acoust. Soc. Am. 2013, 134, 813–821. [Google Scholar] [CrossRef]
- Graziuso, G.; Grimaldi, M.; Mancini, S.; Quartieri, J.; Guarnaccia, C. Crowdsourcing Data for the Elaboration of Noise Maps: A Methodological Proposal. J. Phys. Conf. Ser. 2020, 1603, 012030. [Google Scholar] [CrossRef]
- Graziuso, G.; Mancini, S.; Francavilla, A.B.; Grimaldi, M.; Guarnaccia, C. Geo-Crowdsourced Sound Level Data in Support of the Community Facilities Planning. A Methodological Proposal. Sustainability 2021, 13, 5486. [Google Scholar] [CrossRef]
- Siliézar, J.; Aumond, P.; Can, A.; Chapron, P.; Péroche, M. Case study on the audibility of siren-driven alert systems. Noise Mapp. 2023, 10, 20220165. [Google Scholar] [CrossRef]
- Dorffer, C.; Puigt, M.; Delmaire, G.; Roussel, G. Informed Nonnegative Matrix Factorization Methods for Mobile Sensor Network Calibration. IEEE Trans. Signal Inf. Process. Netw. 2018, 4, 667–682. [Google Scholar] [CrossRef]
- Breunig, M.M.; Kriegel, H.P.; Ng, R.T.; Sander, J. LOF: Identifying density-based local outliers. ACM SIGMOD Rec. 2000, 29, 93–104. [Google Scholar] [CrossRef]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation Forest. In Proceedings of the 2008 Eighth IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; pp. 413–422. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphone∖Zone | |||||
|---|---|---|---|---|---|
| ‘pk_party’ | Country | Tracks | Points | Time Period (24-Hour Format) | Nb of Sensors | Nb of Cal. Sensors | Zones | Links | |
|---|---|---|---|---|---|---|---|---|---|
| 10 | Italy | 149 | 15,912 | 11:00–12:00 | 12 | 11 | 479 | 357 | 5.4 |
| 13 | France | 100 | 21,470 | 10:00–11:00 | 11 | 11 | 817 | 508 | 9.2 |
| 22 | France | 192 | 17,309 | 12:00–19:00 | 23 | 23 | 403 | 1902 | 7.5 |
| 26 | Italy | 332 | 23,220 | 10:00–12:00 | 20 | 20 | 619 | 2526 | 13.3 |
| Hexagon Size | |||||
|---|---|---|---|---|---|
| Minimum Number of Links | 10 m | 15 m | 30 m | 50 m | |
| 1 (NGM) | Mean error | −2.33 | 0.36 | −0.97 | −1.28 |
| Uncertainty | ±7 | ±8 | ±7 | ±6.5 | |
| 15 | Mean error | −2.33 | −0.04 | −0.97 | −1.21 |
| Uncertainty | ±7 | ±7.5 | ±7 | ±6.5 | |
| 40 | Mean error | −2.77 | −2.13 | −3.12 | −3.69 |
| Uncertainty | ±6.5 | ±5.5 | ±7.5 | ±7 | |
| 55 | Mean error | −3.86 | −2.77 | −3.71 | −2.54 |
| Uncertainty | ±6 | ±5 | ±5 | ±5 | |
| 80 | Mean error | −3.37 | −2.34 | −3.72 | |
| Uncertainty | ±5 | ±4 | ±4.5 | ||
| 120 | Mean error | −3.54 | −1.88 | ||
| Uncertainty | ±4 | ±3.2 | |||
| 140 | Mean error | −3.48 | −1.92 | ||
| Uncertainty | ±4 | ±2.5 | |||
| 190 | Mean error | −4.76 | |||
| Uncertainty | ±3.5 | ||||
| Minimum Number of Links per Sensor | 1 | 5 | 10 | 20 | 50 | 100 | 200 | 500 |
|---|---|---|---|---|---|---|---|---|
| Full dataset | ||||||||
| IQR | 19.4 | 18.6 | 18 | 16.2 | 11.4 | 6.8 | 21.1 | 26.6 |
| Mean | −6 | −6 | −6 | −5.4 | −2.7 | −3.4 | −11.8 | −12 |
| Median | −6.5 | −6.5 | −6.5 | −6 | −2.5 | −3.4 | −12.2 | −11.8 |
| Number of (smartphone, user) pairs | 201 | 169 | 155 | 145 | 94 | 72 | 37 | 30 |
| Filtered dataset—10 s | ||||||||
| IQR | 18.9 | 17.9 | 17.1 | 15.7 | 11.1 | 19.6 | 22.6 | |
| Mean | −4.2 | −5.1 | −2.1 | −4 | −2.9 | −3.6 | −9.9 | |
| Median | −3.7 | 2.8 | −1.3 | −4.9 | −1.8 | −4.7 | −12.6 | |
| Number of (smartphone, user) pairs | 163 | 131 | 108 | 85 | 57 | 26 | 19 | |
| Filtered dataset—20 s | ||||||||
| IQR | 17 | 16.9 | 20.4 | |||||
| Mean | −3.8 | −3.6 | −4.8 | |||||
| Median | −2.9 | −2.8 | −5.5 | |||||
| Number of (smartphone, user) pairs | 101 | 45 | 18 | |||||
| Filtered dataset—30 s | ||||||||
| IQR | 16.3 | 18.9 | 19 | |||||
| Mean | −3.1 | −0.7 | −3.6 | |||||
| Median | −3.9 | −1.5 | −0.8 | |||||
| Number of (smartphone, user) pairs | 63 | 20 | 12 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boumchich, A.; Picaut, J.; Aumond, P.; Can, A.; Bocher, E. Blind Calibration of Environmental Acoustics Measurements Using Smartphones. Sensors 2024, 24, 1255. https://doi.org/10.3390/s24041255
Boumchich A, Picaut J, Aumond P, Can A, Bocher E. Blind Calibration of Environmental Acoustics Measurements Using Smartphones. Sensors. 2024; 24(4):1255. https://doi.org/10.3390/s24041255
Chicago/Turabian StyleBoumchich, Ayoub, Judicaël Picaut, Pierre Aumond, Arnaud Can, and Erwan Bocher. 2024. "Blind Calibration of Environmental Acoustics Measurements Using Smartphones" Sensors 24, no. 4: 1255. https://doi.org/10.3390/s24041255
APA StyleBoumchich, A., Picaut, J., Aumond, P., Can, A., & Bocher, E. (2024). Blind Calibration of Environmental Acoustics Measurements Using Smartphones. Sensors, 24(4), 1255. https://doi.org/10.3390/s24041255