
An Innovative Smart and Sustainable Low-Cost Irrigation System for Anomaly Detection Using Deep Learning


Abstract
1. Introduction
- (i)
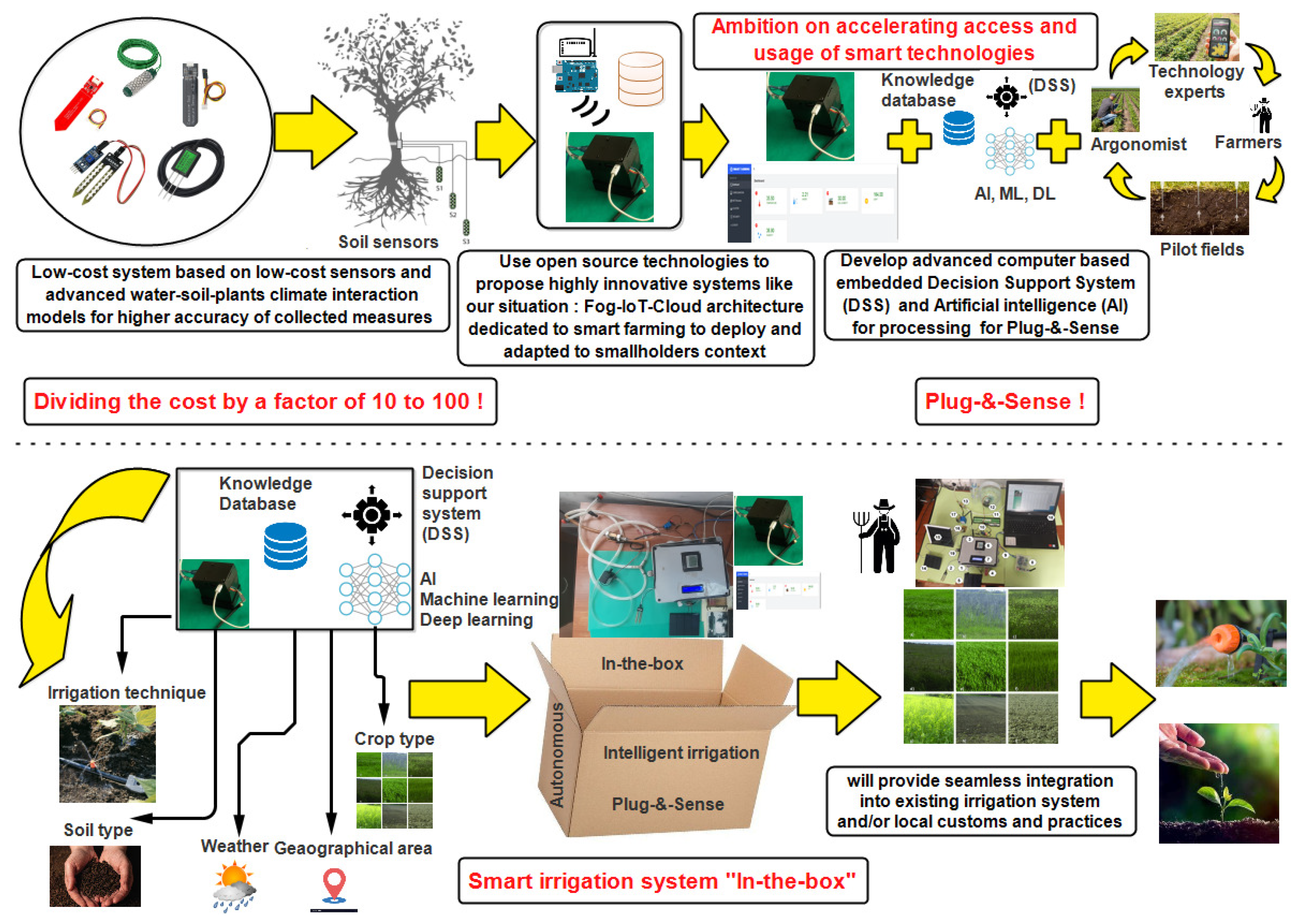
- The design and development of a low-cost fog-IoT/AI system, version 1.0, fully targeted towards smallholder farmer communities (SFCs) to enhance irrigation decision making.
- (ii)
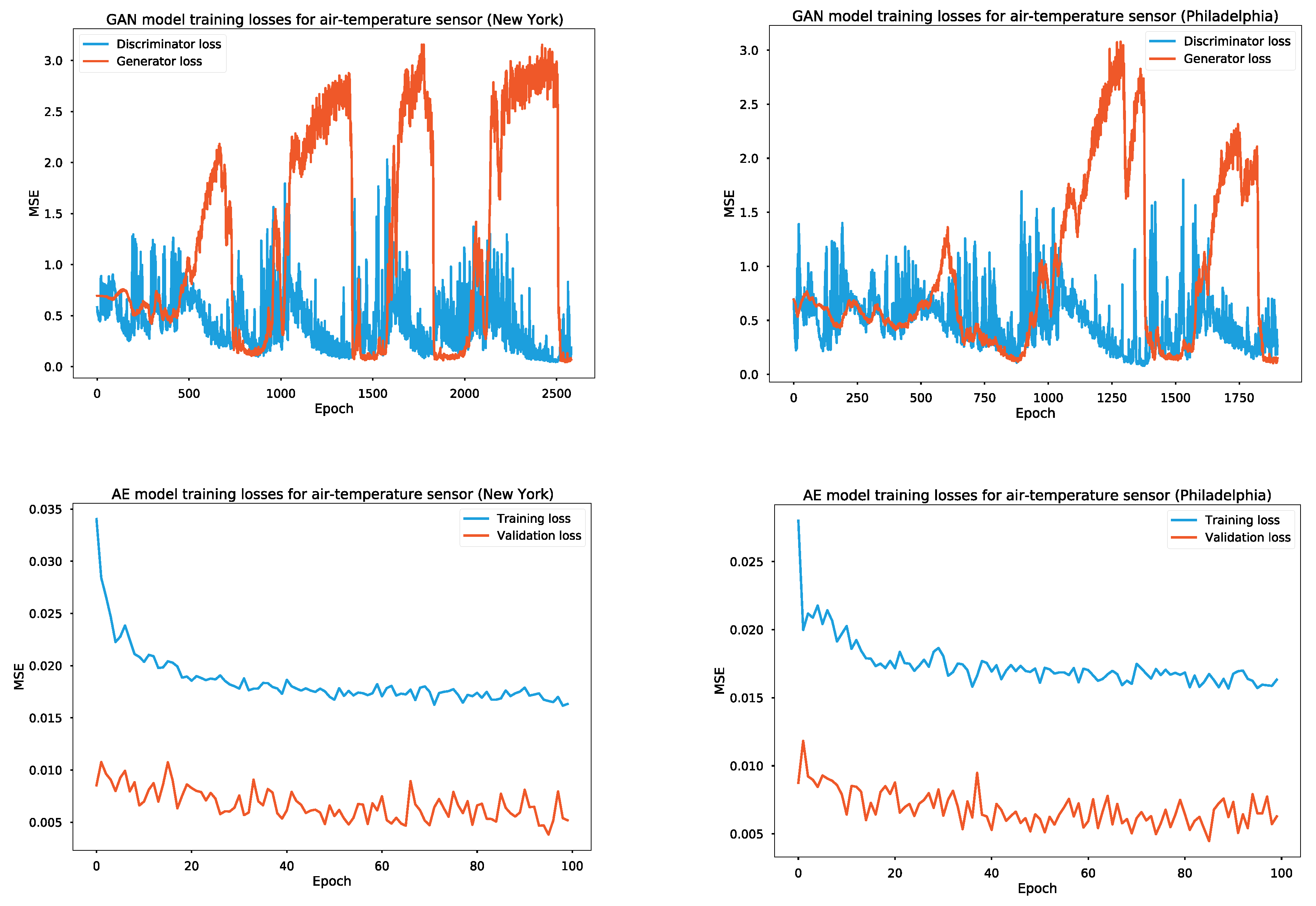
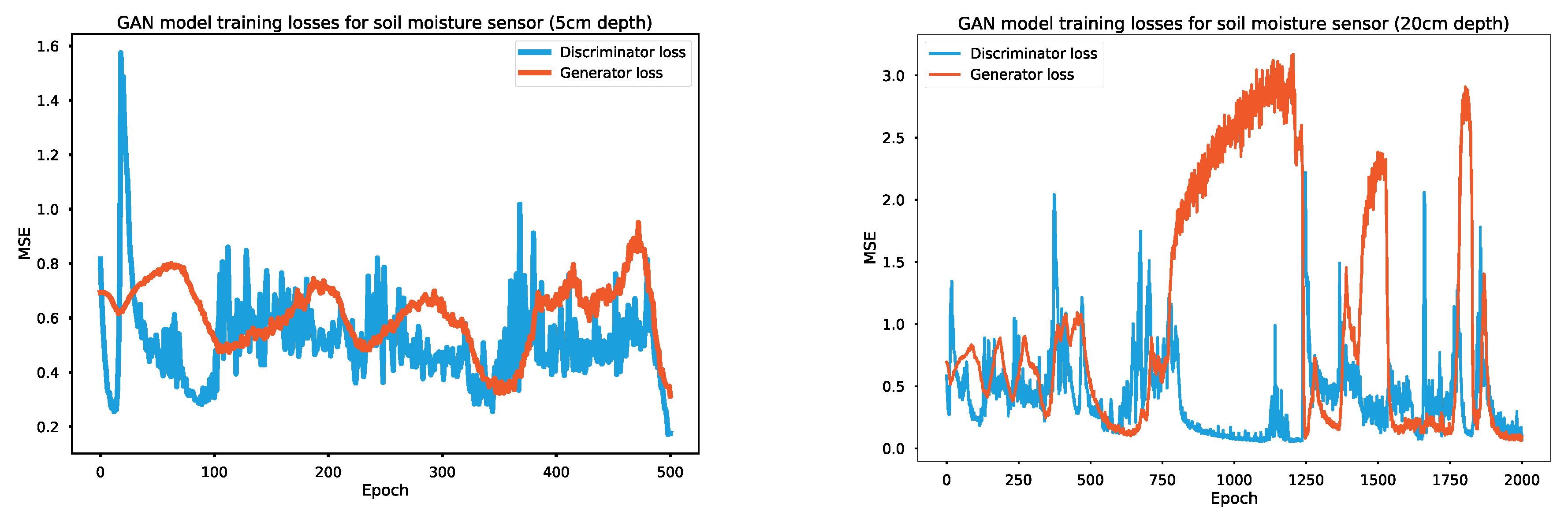
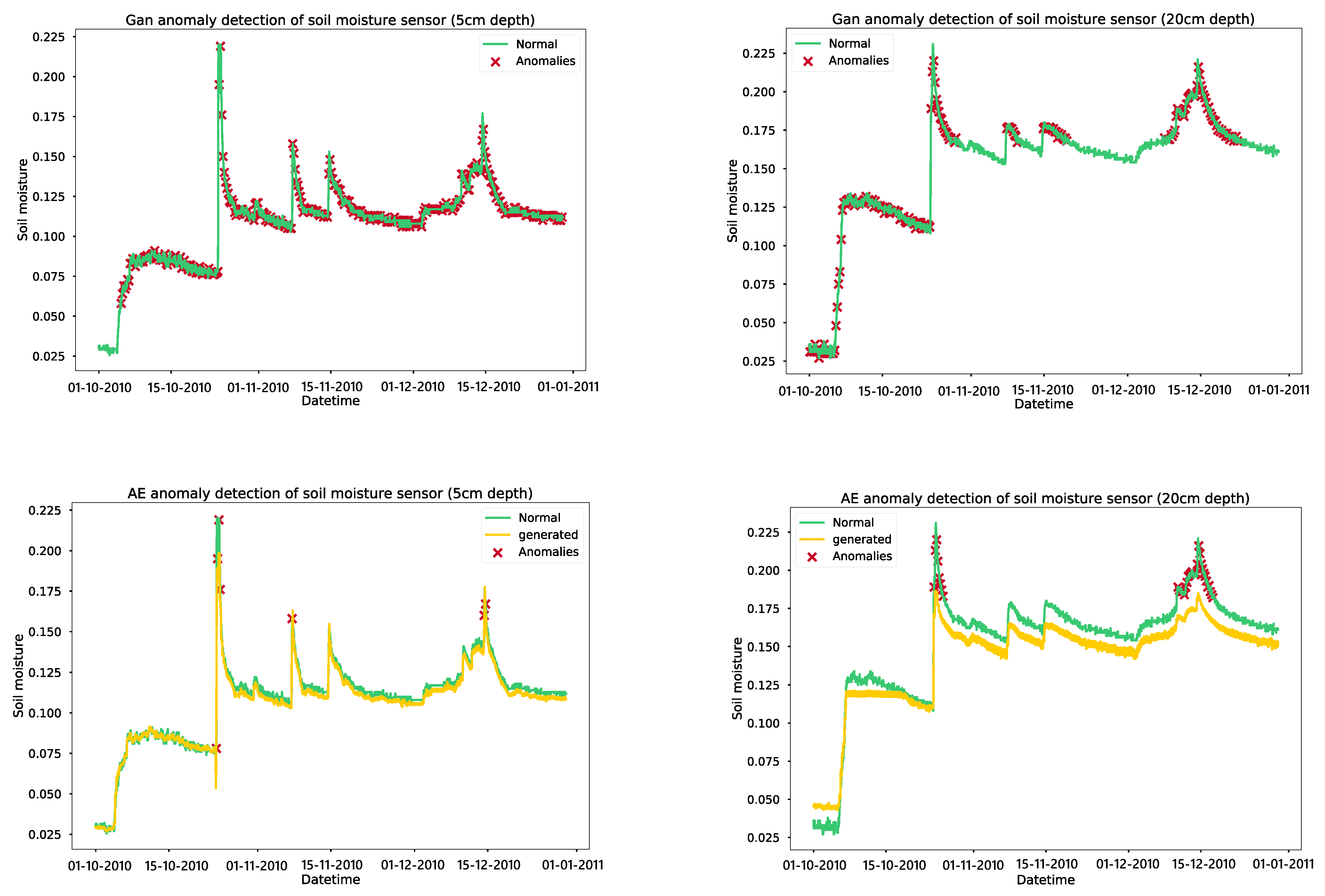
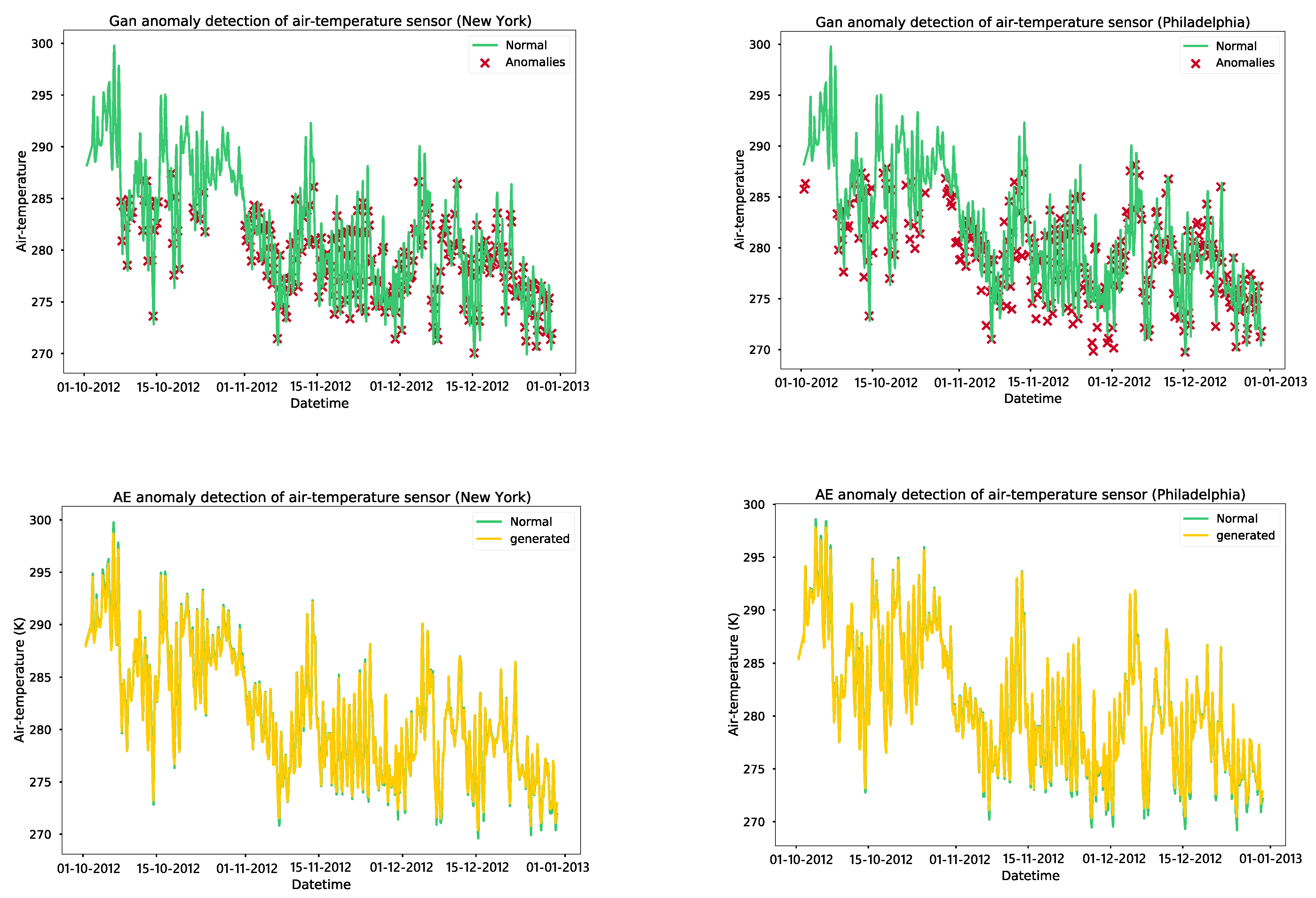
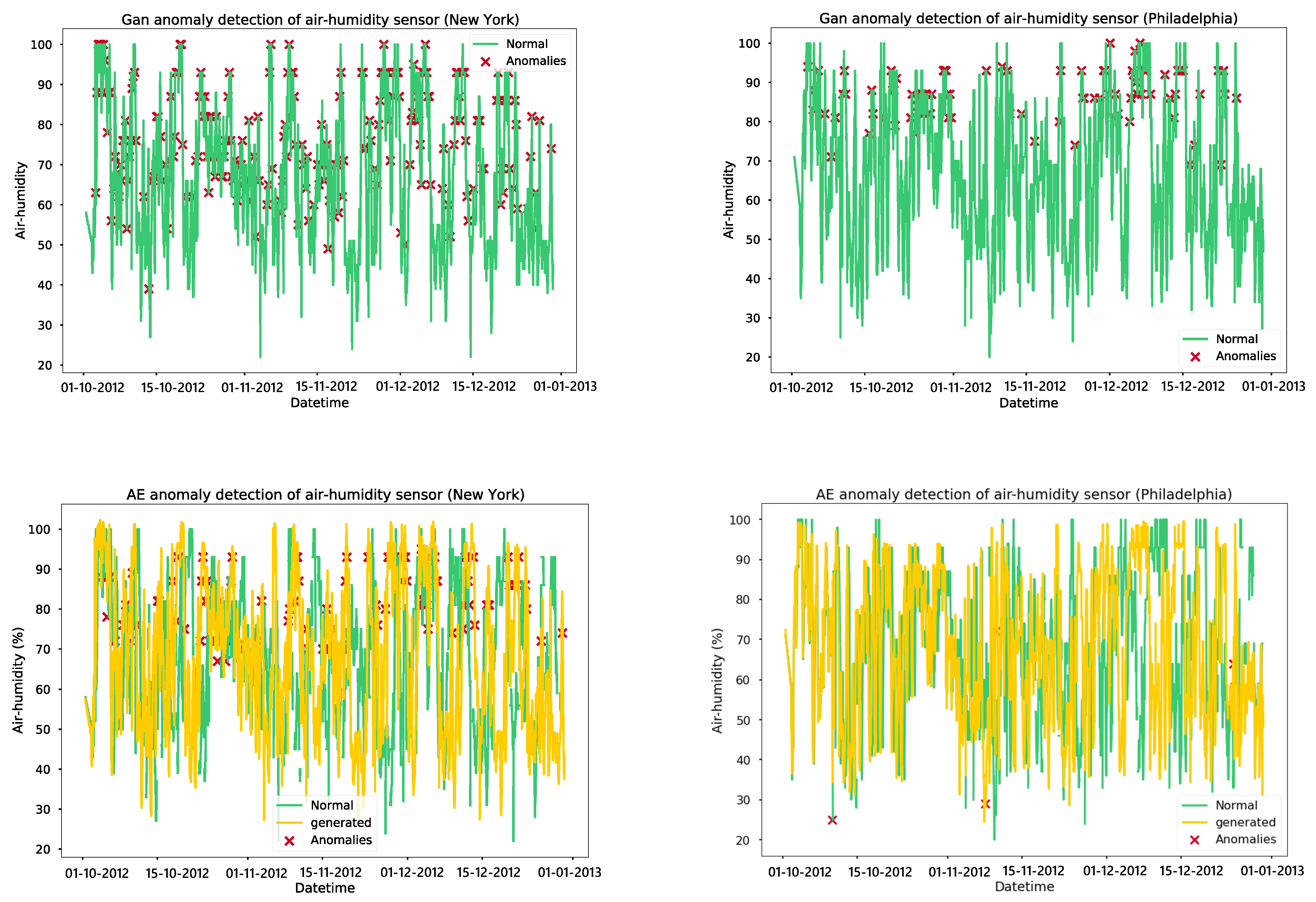
- We provide a comprehensive performance assessment and comparison between the autoencoders (AE) and generative adversarial networks (GAN) to detect anomalies in environmental factors data.
- (iii)
- Predicting the most important environmental factors (air temperature, air humidity, soil moisture) based on field sensory data and weather forecast data using CNN/BiLSTM architecture to provide SFCs with recommendations.
2. Related Studies
- (i)
- Underground sensing: the IOUT requirement emerges partially or fully buried underground for real-time monitoring and soil sensing; several essential irrigation characteristics include soil moisture, soil texture, soil salinity, etc.
- (ii)
- Environmental sensing: it is used to monitor important weather pattern changes in real-time.
- (iii)
- Geographic information systems (GIS): provide a potent instrument for near-real-time analysis of crop status. Ground-based equipment, aerial drones, and satellites all collect GIS agriculture data.
- (iv)
- Soil texture: on precision agriculture (PA), we computed the useable reserve of water (RU) based on the soil texture (clay, limon, sand, organic matter).
- (v)
- Machine learning approaches: it indicates whether the study considered machine learning approaches for intrusion detection systems.
- (vi)
- Deep learning approaches: it specifies if the study was focused on deep learning approaches for intrusion detection systems.
- (vii)
- Low-cost: the objective of the Intel-Irris project is to use low-cost sensors by dividing the cost by a factor of 10 to 100.
- (viii)
- Anomaly detection: the detection of anomalies is a crucial stage that will enhance the quality of results in predictive modeling and pattern extraction, enabling the identification of problems and facilitating decision making in data-based services.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Underground Sensing | Environmental Sensing | GIS | Soil Texture | ML | DL | Low Cost | Anomaly Detection |
|---|---|---|---|---|---|---|---|---|
| [3] | Yes | No | Yes | Yes | Yes | Yes | Yes | Yes |
| [15] | No | Yes | No | No | No | No | No | No |
| [18] | No | Yes | No | No | Yes | Yes | No | No |
| [19] | Yes | Yes | No | No | Yes | No | No | No |
| [20] | Yes | No | No | Yes | Yes | No | Yes | No |
| [21] | Yes | Yes | No | Yes | No | No | Yes | No |
| [22] | No | No | Yes | No | Yes | No | No | No |
| [17] | Yes | Yes | No | No | No | No | No | No |
| [23] | No | Yes | No | No | Yes | No | No | No |
| [24] | Yes | No | No | No | No | No | Yes | No |
| Proposed platform | Yes | Yes | No | Yes | Yes | Yes | Yes | Yes |
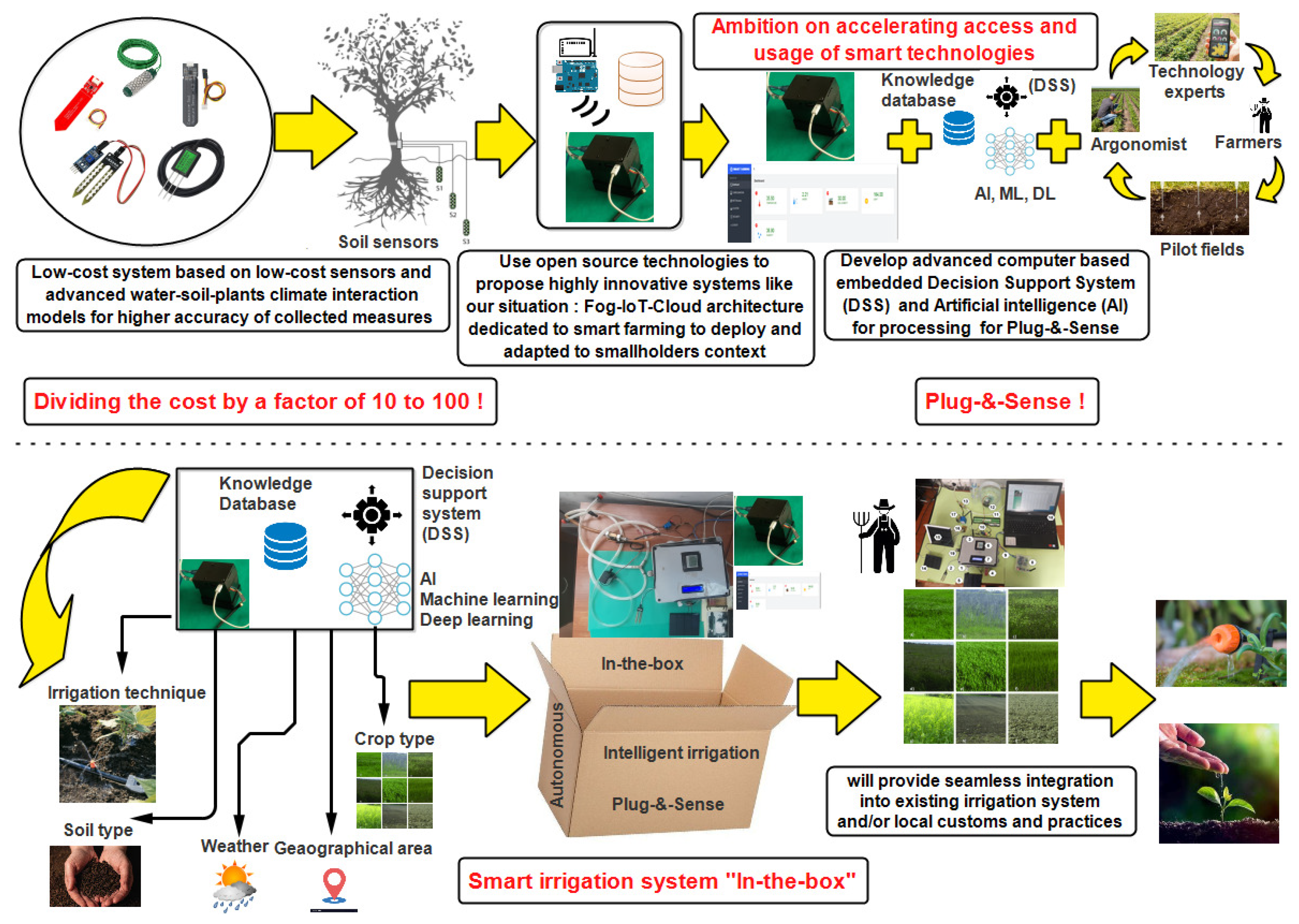
3. Supplying Smallholder Farmers with Smart Technology
3.1. A Summary of the INTEL-IRRIS and PNR Projects
3.2. Smart and Sustainable Irrigation System
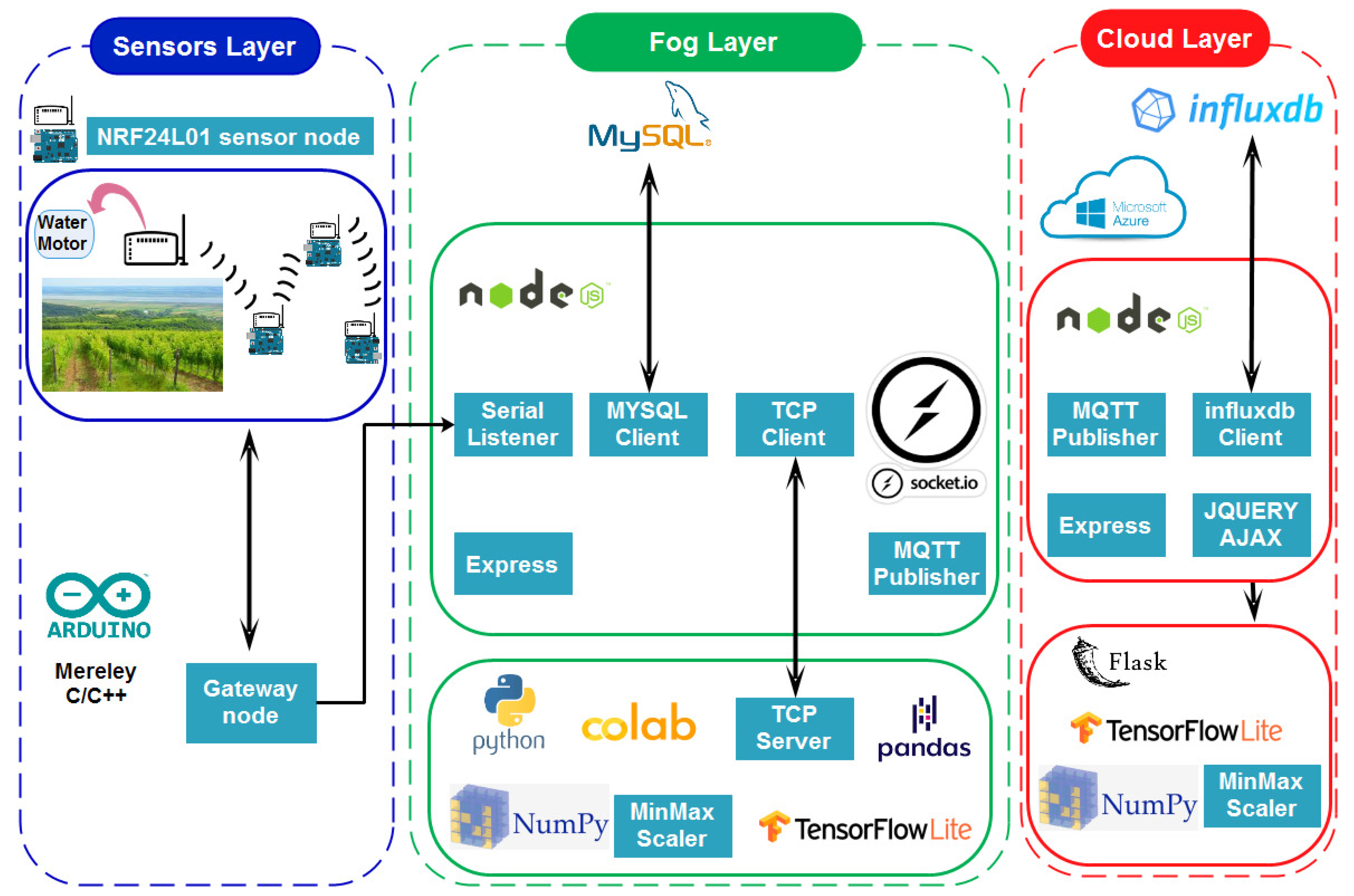
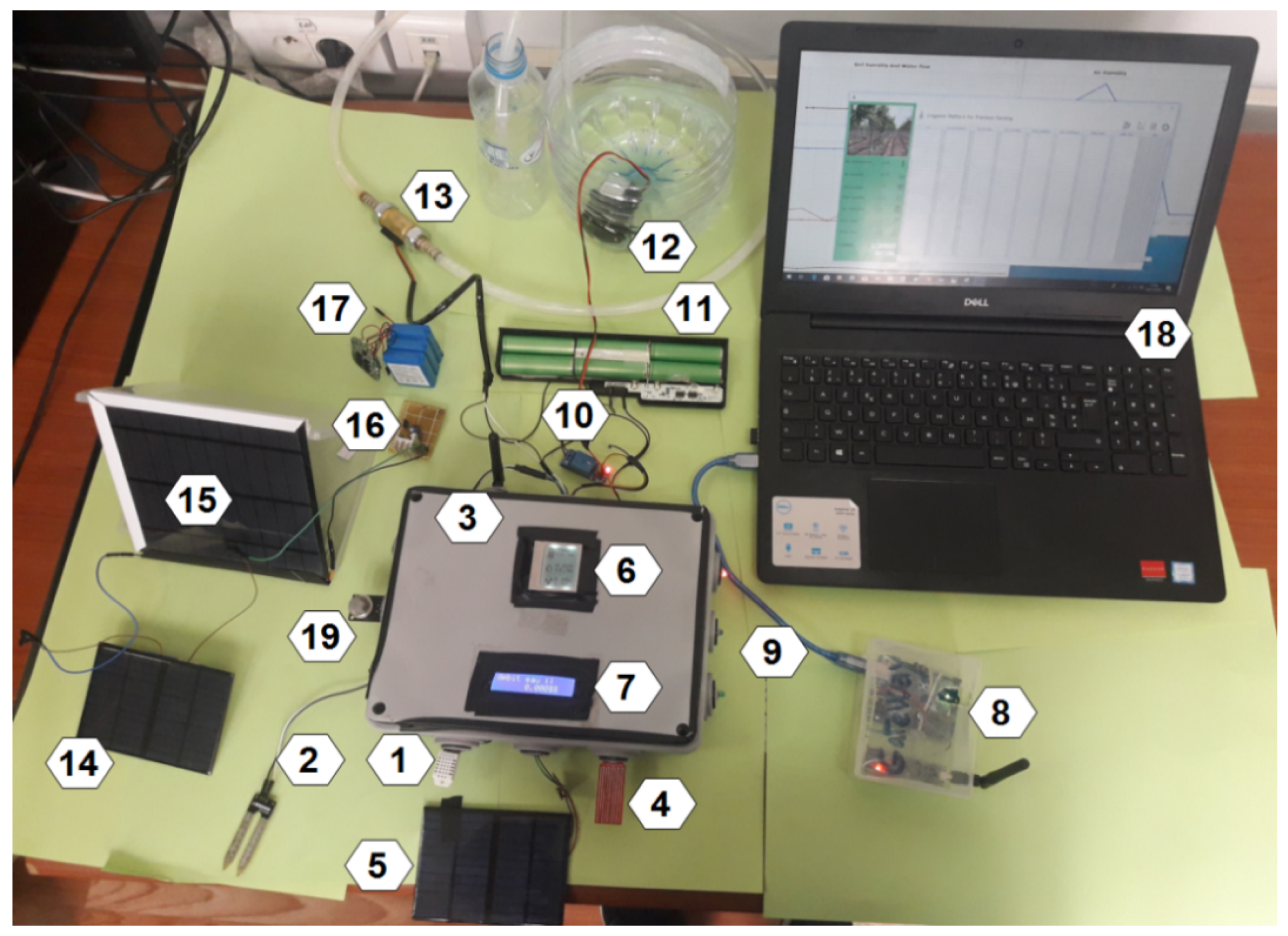
3.3. Hardware Architecture
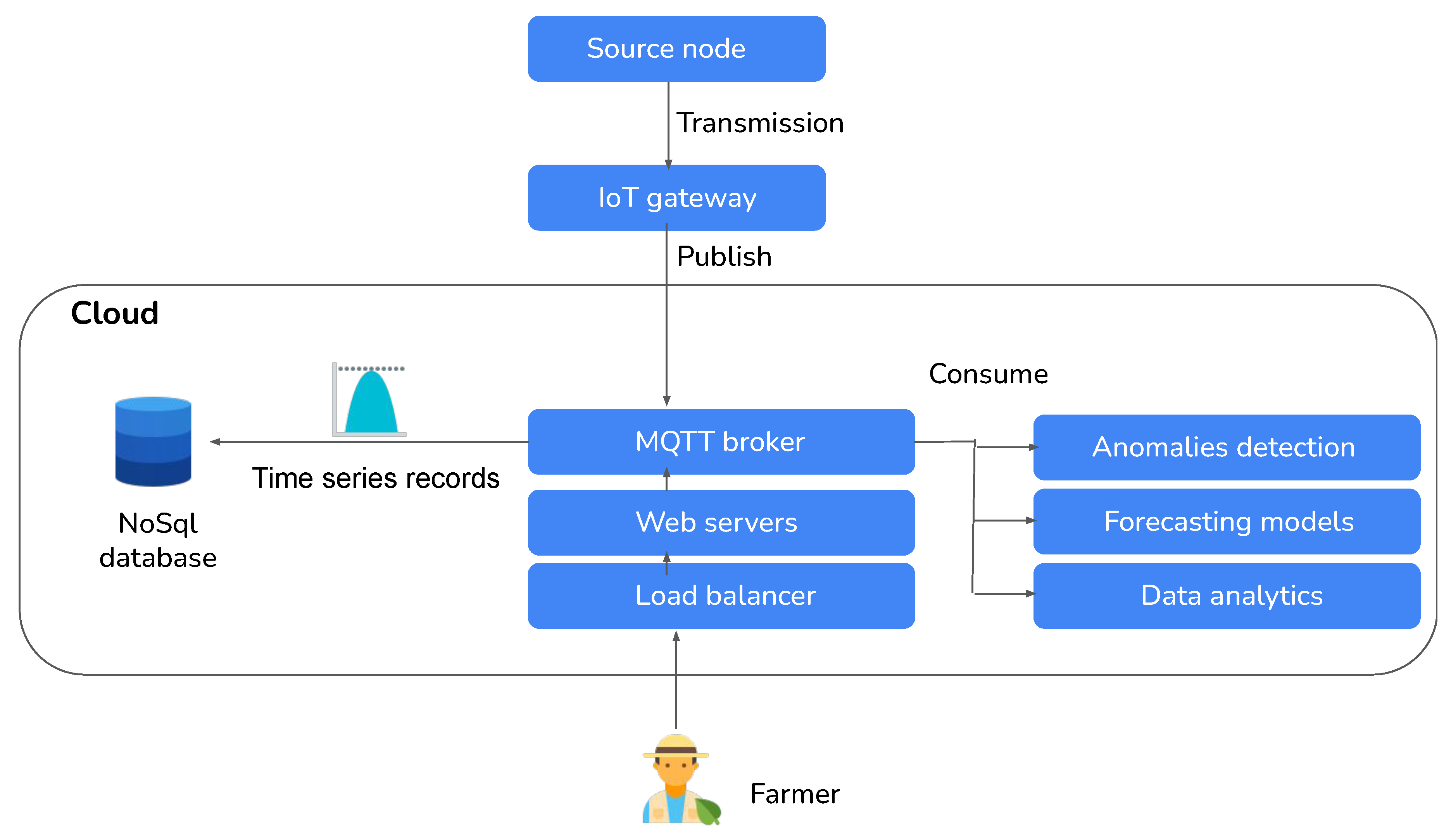
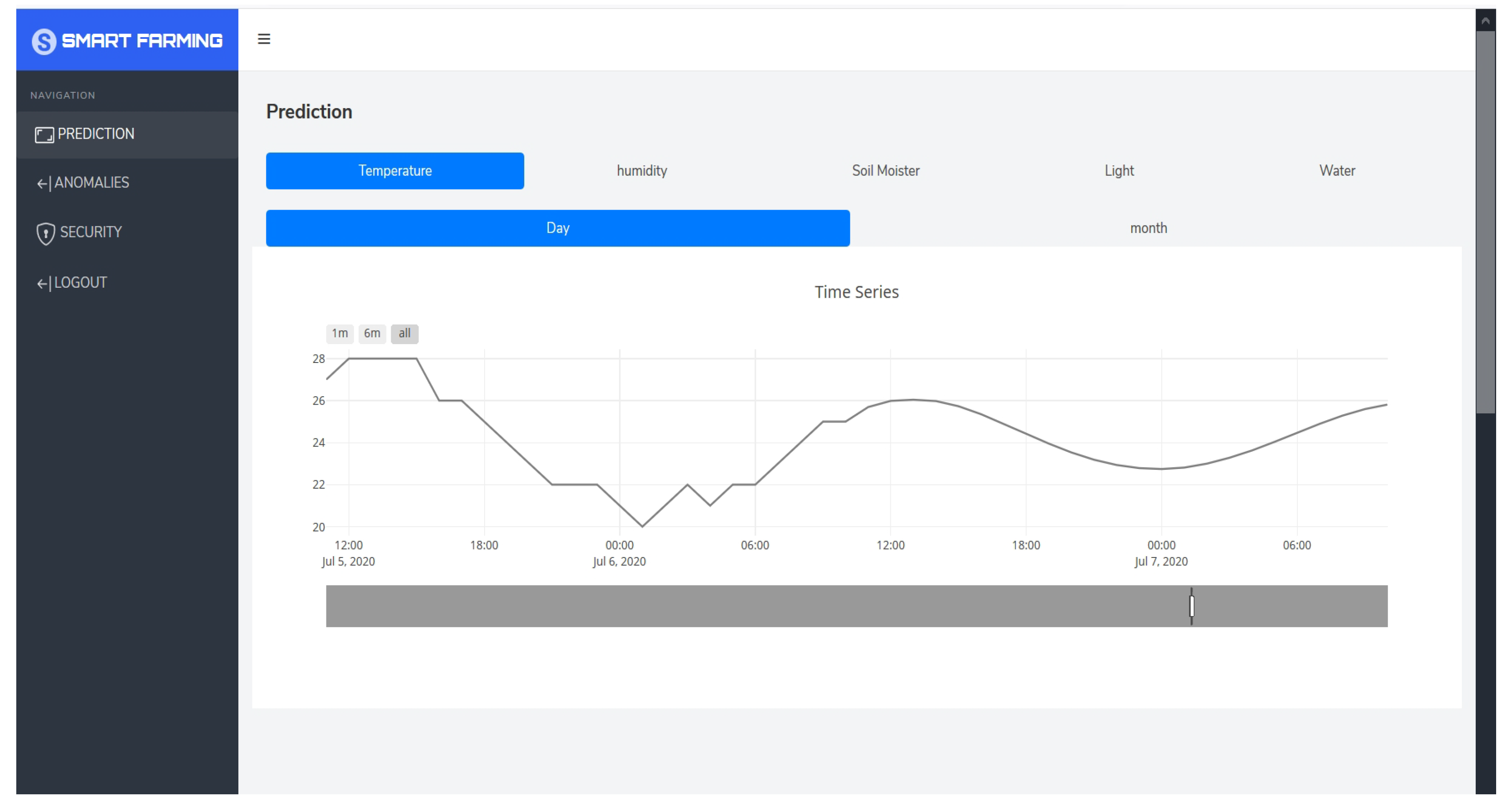
3.4. Software Architecture
3.5. Box A: Sensing Node
3.6. Box B: Relay Node
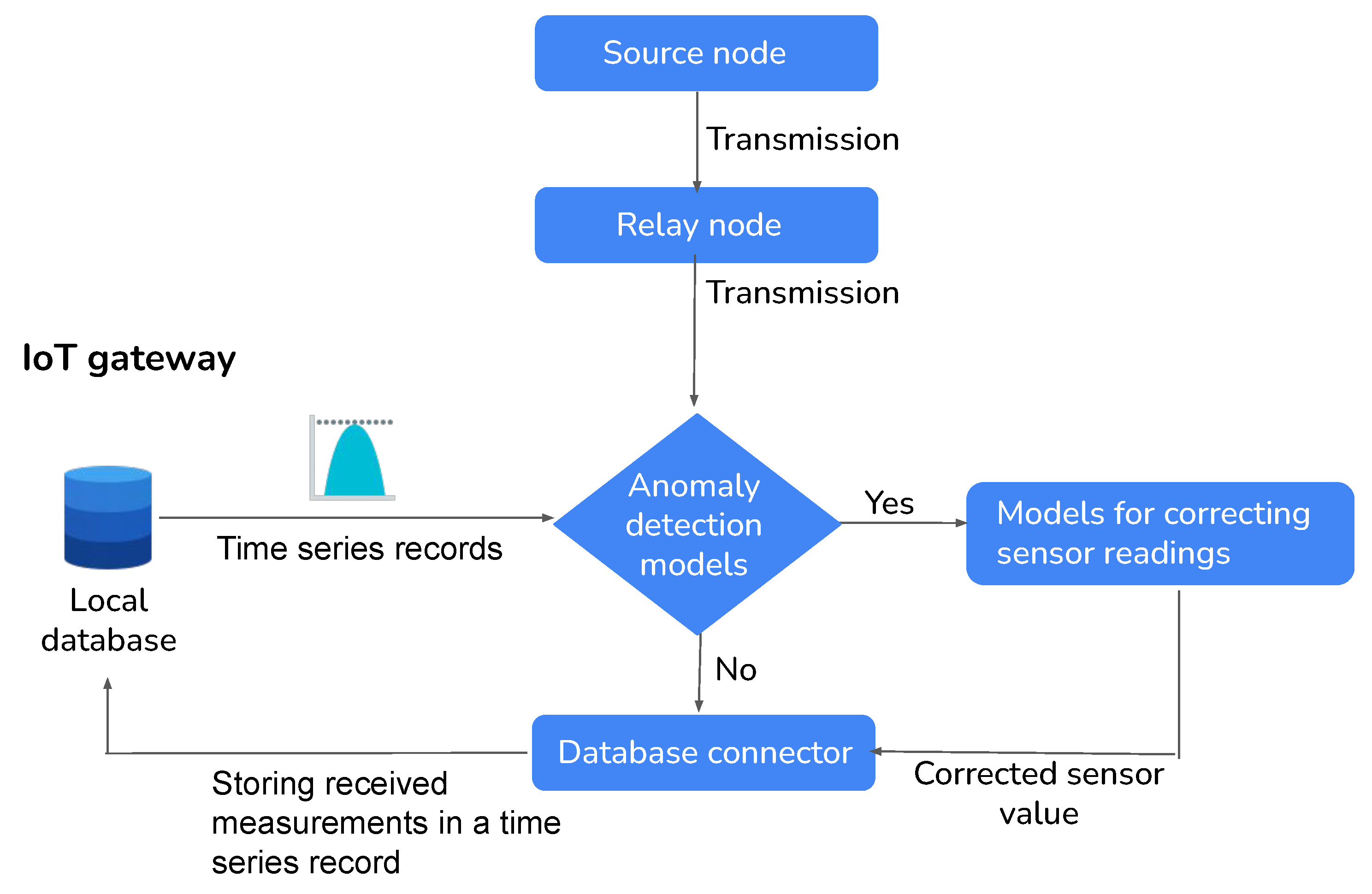
3.7. Box C: IoT Gateway
3.8. Cloud Layer
4. Sensor Anomalies Detection for Smart Irrigation Systems
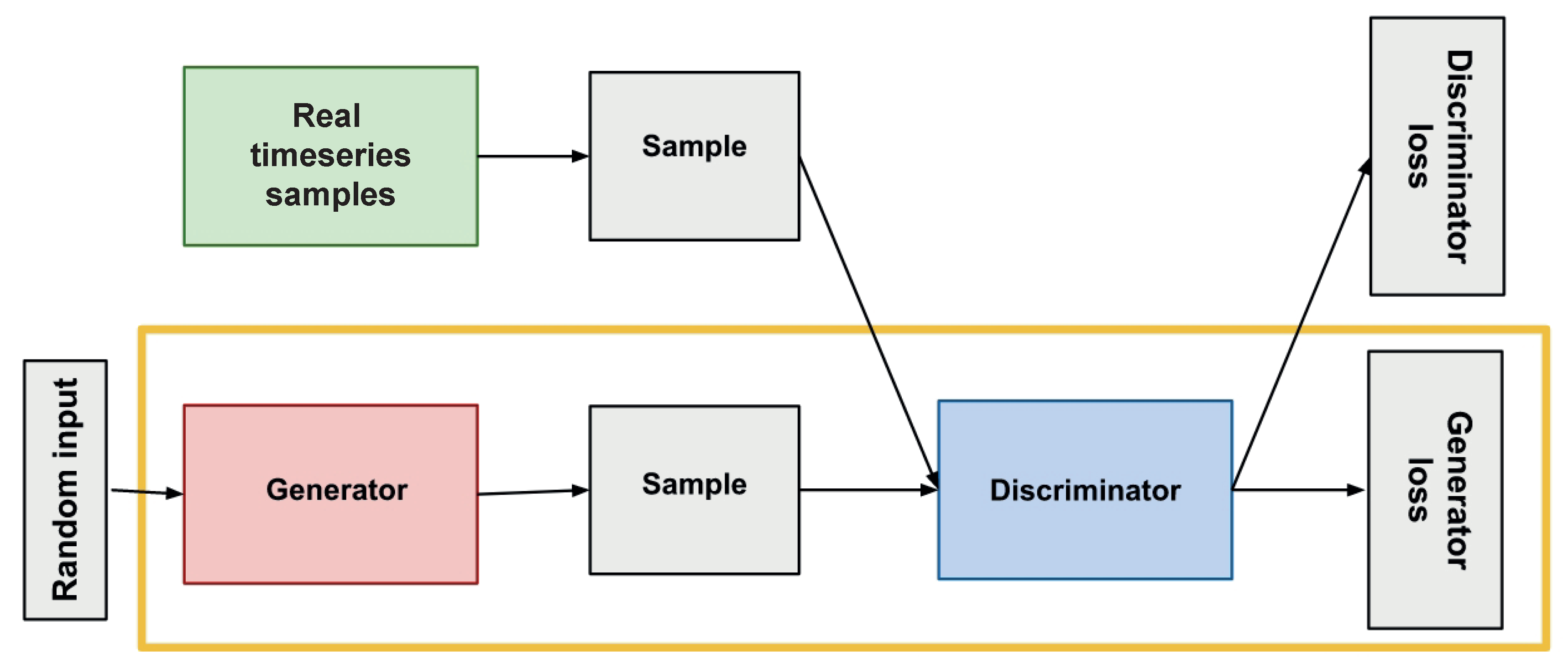
4.1. Generative Adversarial Networks (GAN)
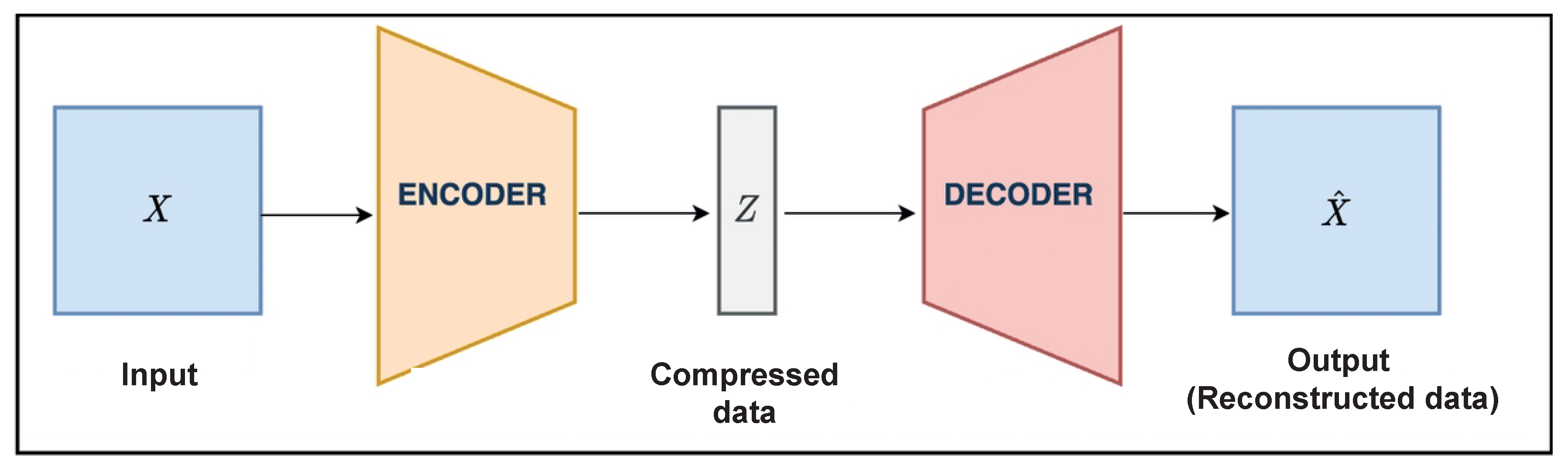
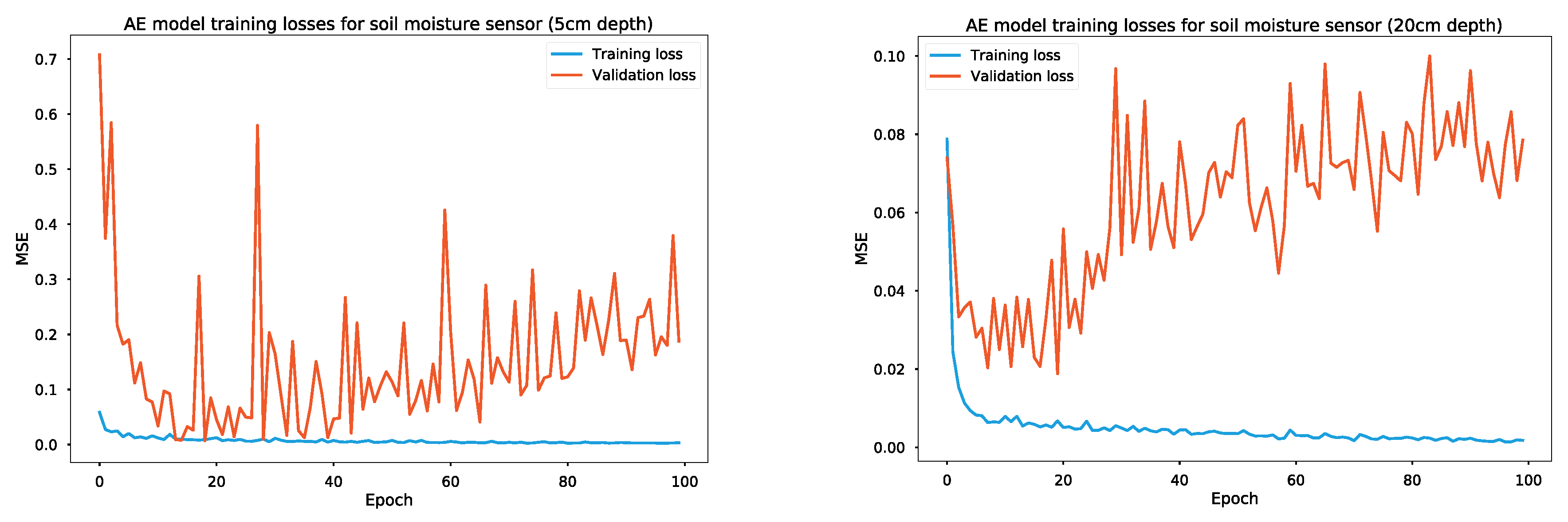
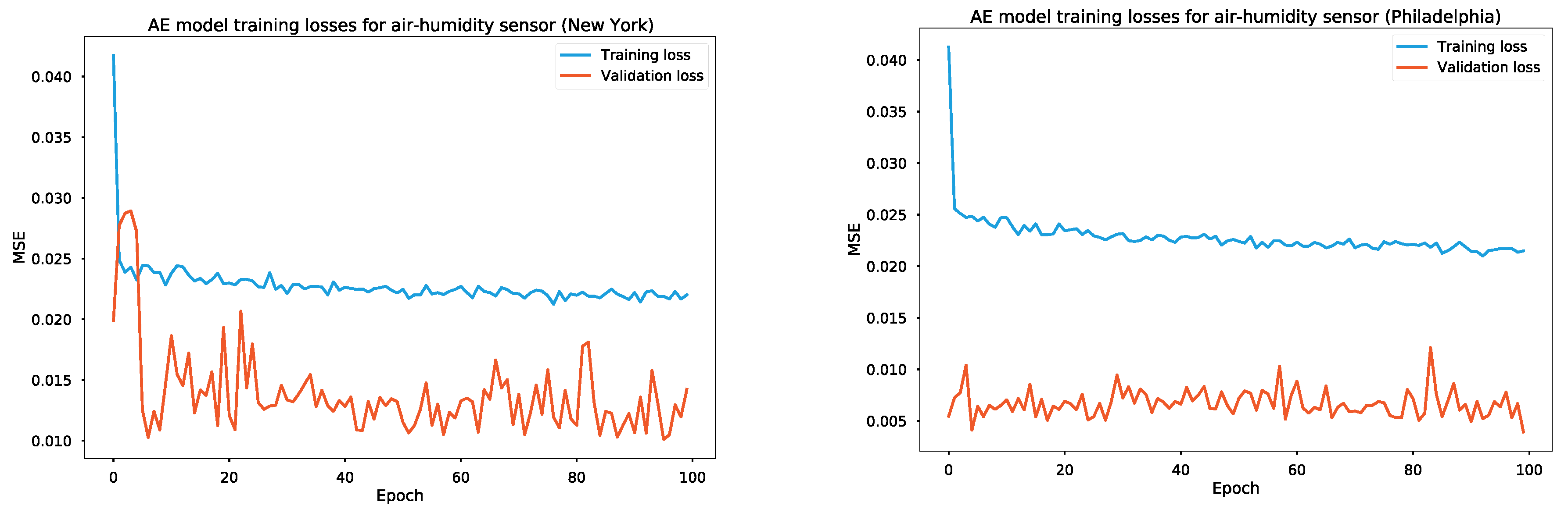
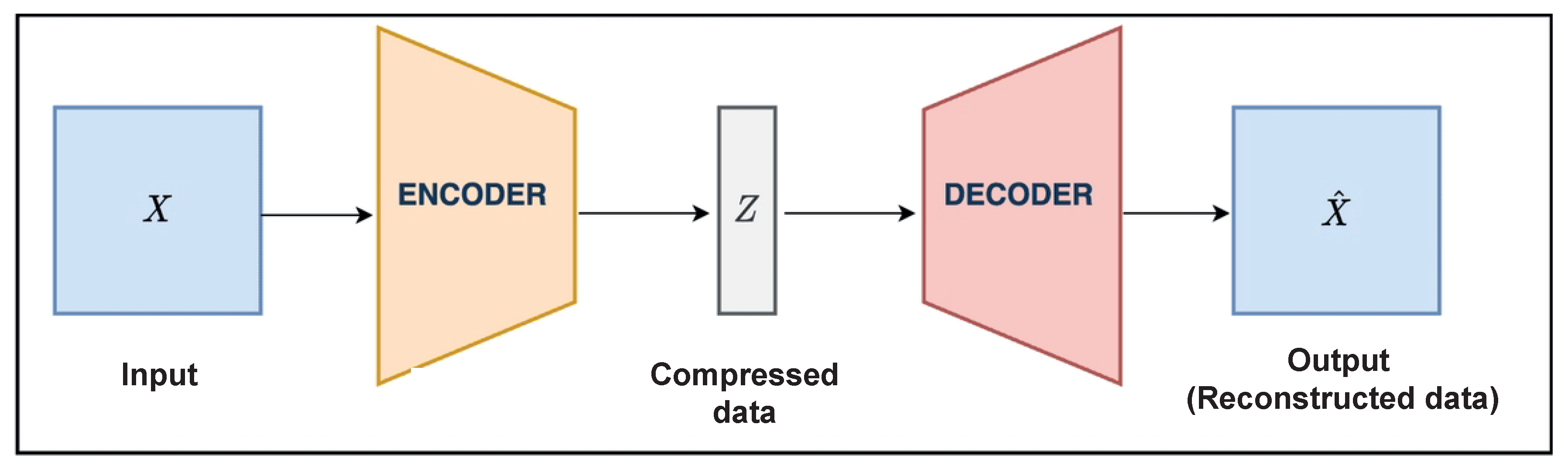
4.2. Autoencoder (AE)
4.3. Problem Formulation
4.4. Dataset Preprocessing
4.5. Implementation
4.6. Description of Evaluation Metrics
- True Positive (TP): represents the number of abnormal samples correctly classified as attacks (correct detection).
- False Positive (FP): represents the number of normal samples wrongly classified as attacks (incorrect detection).
- True Negative (TN): represents the number of normal samples wrongly classified (correct detection).
- False Negative (FN): represents the number of abnormal samples wrongly classified as attacks (incorrect detection).
- Accuracy: reports the proportion of properly categorized samples to all other samples in the testing set.
- Precision: reports the percentage of samples properly categorized for all TP and FP in the testing set.
- Recall: the ratio of TP samples to the total number of TP and FN samples is known as recall.
- The F1-score reports the harmonic mean between precision and recall.
4.7. Results and Evaluation
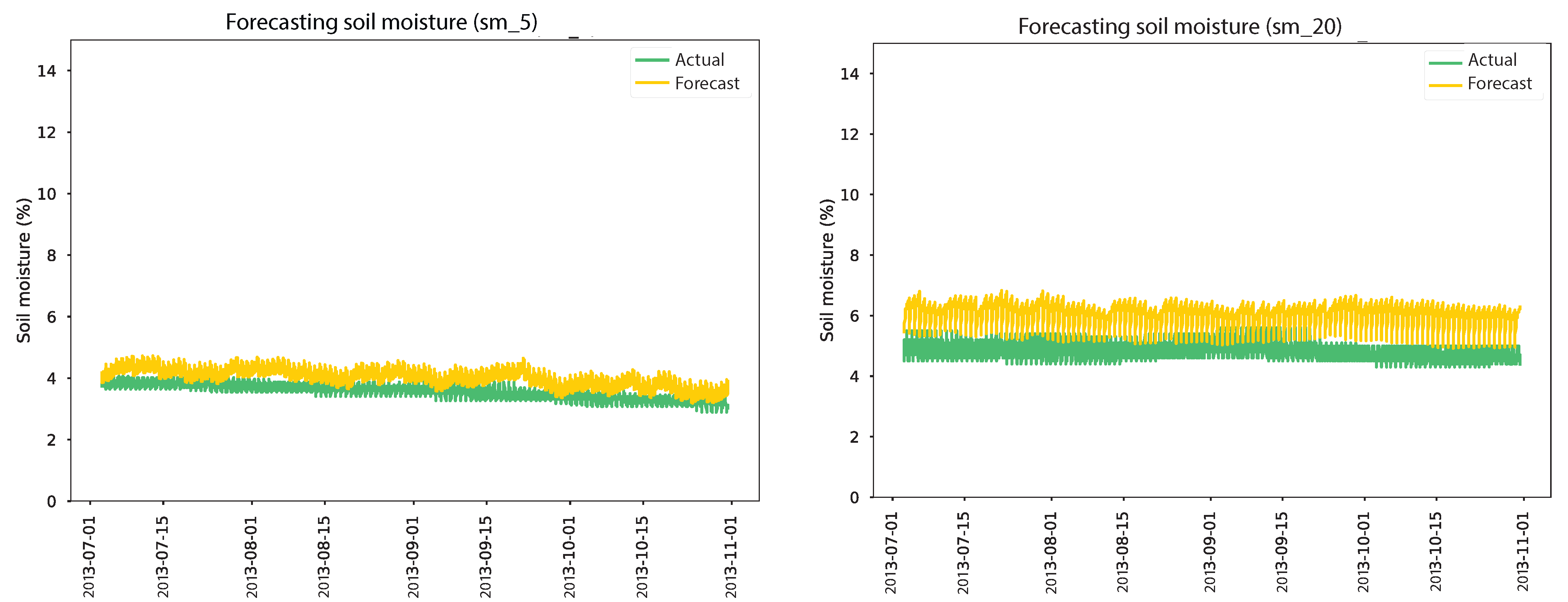
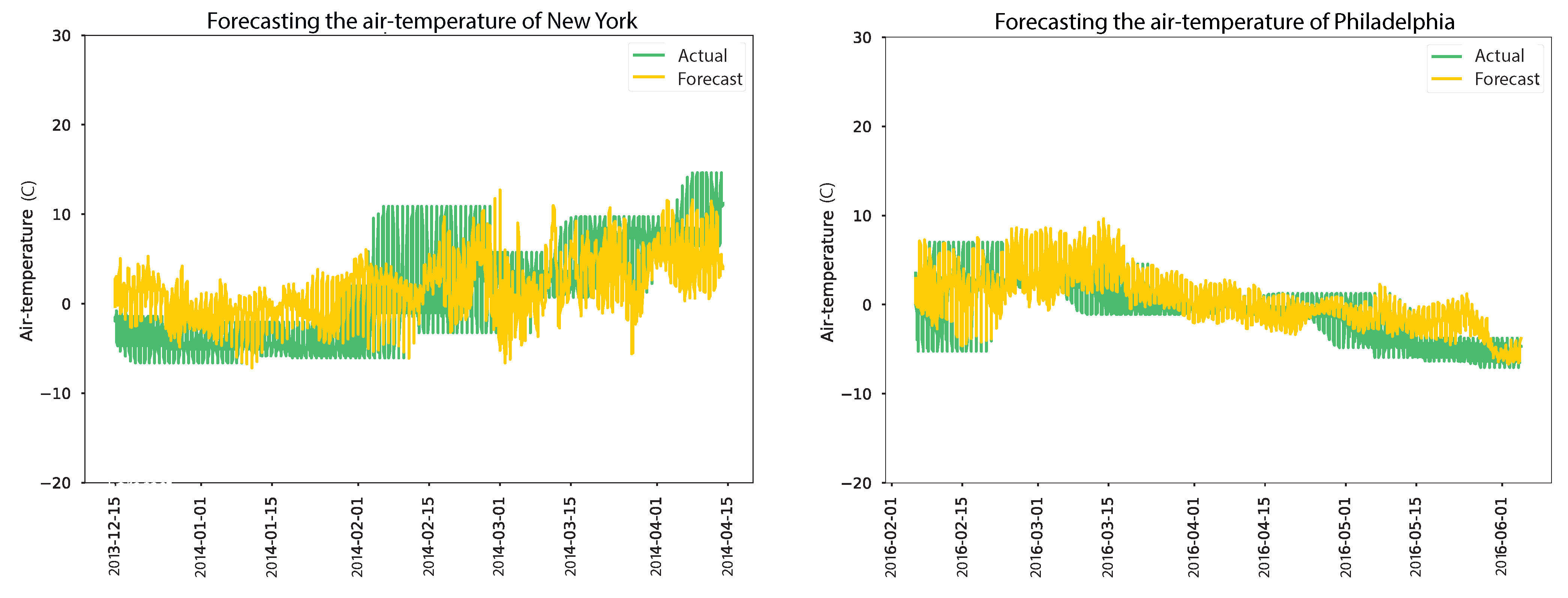
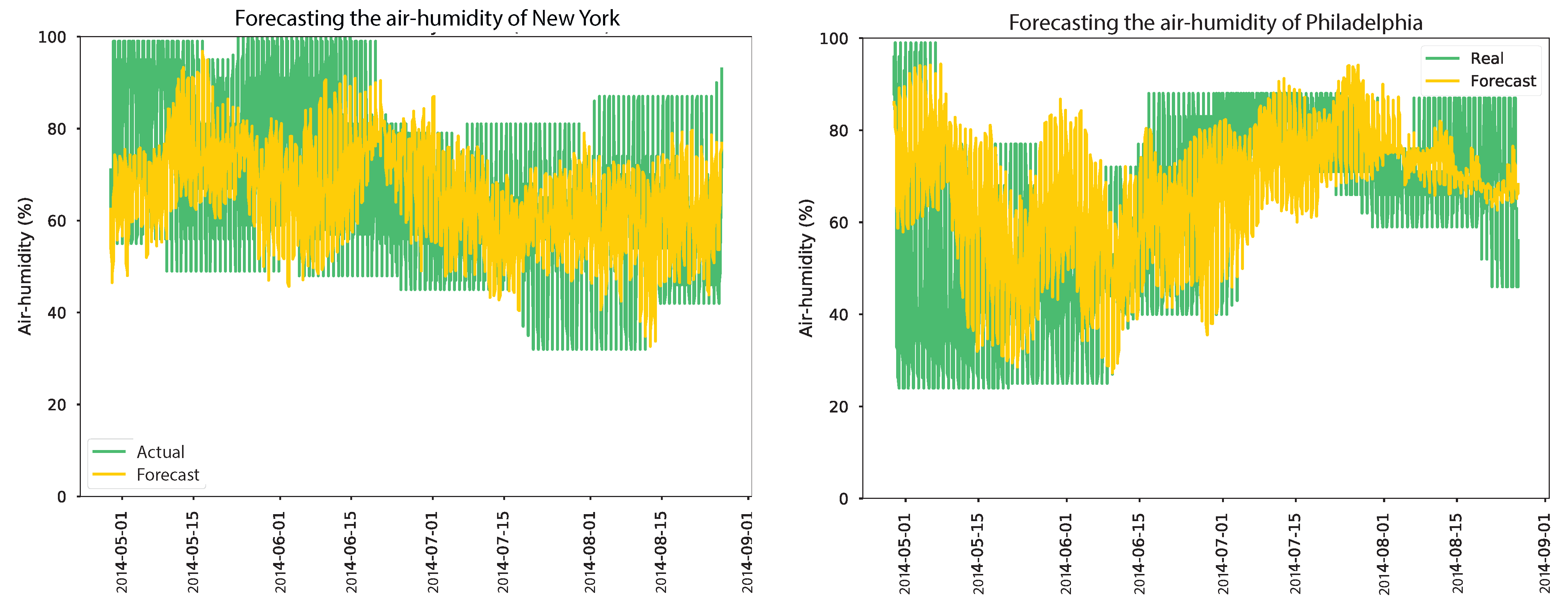
5. Irrigation Factors Forecasting Using Deep Learning
5.1. Forecasting Model for Potential Irrigation Factors
5.2. Evaluation Metrics of Forecasting Models Based on Deep Learning Models
5.3. Results and Discussion
6. Conclusions and Future Trends
- To enhance the accuracy of the acquired data, we will increase the accuracy of low-cost sensors using autonomous and remotely managed techniques to improve the different sensors’ calibration [32]. As a consequence, our water–soil–plant–climate interaction models will prescribe more correct measures.
- To enhance the reliability, accessibility, and tracking of sensors and actuators, incorporating a blockchain security framework is recommended. This integration will establish a strong mechanism for data integrity, availability, and traceability in the system.
- The design and implementation of precision PA-based Low-Power Wide-Area Network (LPWAN) technologies like Lora and Sigfox. These approaches are designed to conserve energy, like the Long-Range Wide-Area Network (LoRaWAN), and enhance the irrigation efficiency of large-holder farmers.
- Offer the “out-of-the-box” function, meaning that the control component that recommends irrigation is integrated into the IoT gateway and, as a result, does not need an internet connection, as implemented by WAZIUP partner [27].
- Traditional deep learning systems need centralized data gathering and processing, which is becoming more unfeasible due to efficiency issues and rising data privacy concerns. Due to these qualities, federated learning has been a hot topic in smart agriculture. We intend to conduct a comprehensive assessment of the FL approach and the centralized machine learning models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IoT | Internet of Things. |
| DL | Deep Learning. |
| ML | Machine Learning. |
| AE | Autoencoder. |
| GAN | Generative Adversarial Network. |
| ANN | Artificial Neural Network. |
| RNN | Recurrent Neural Network. |
| LSTM | Long Short-Term Memory. |
| BiLSTM | Bidirectional Long Short-Term Memory |
| CNN | Convolutional Neural Network. |
| SFCs | Smallholder Farmer Communities. |
Appendix A


References
- Mitra, A.; Vangipuram, S.L.T.; Bapatla, A.K.; Bathalapalli, V.K.V.V.; Mohanty, S.P.; Kougianos, E.; Ray, C. Everything You wanted to Know about Smart Agriculture. arXiv 2022, arXiv:2201.04754. Available online: https://arxiv.org/abs/2201.04754 (accessed on 30 July 2023).
- Trendov, N.M.; Varas, S.; Zeng, M. Digital Technologies in Agriculture and Rural Areas. 2019. Available online: http://www.fao.org/e-agriculture/ (accessed on 30 July 2023).
- Dahane, A.; Benameur, R.; Kechar, B. An IoT Low-Cost Smart Farming for Enhancing Irrigation Efficiency of Smallholders Farmers. Wirel. Pers. Commun. 2022, 127, 3173–3210. [Google Scholar] [CrossRef]
- Wong, Y.J.; Nakayama, R.; Shimizu, Y.; Kamiya, A.; Shen, S.; Rashid, I.Z.M.; Sulaiman, N.M.N. Toward industrial revolution 4.0: Development, validation, and application of 3D-printed IoT-based water quality monitoring system. J. Clean. Prod. 2021, 324, 129230. [Google Scholar] [CrossRef]
- Rayhana, R.; Xiao, G.G.; Liu, Z. Printed Sensor Technologies for Monitoring Applications in Smart Farming: A Review. IEEE Trans. Instrum. Meas. 2021, 70, 9513419. [Google Scholar] [CrossRef]
- Dupont, C.; Vecchio, M.; Pham, C.; Diop, B.; Dupont, C.; Koffi, S. An Open IoT Platform to Promote Eco-Sustainable Innovation in Western Africa: Real Urban and Rural Testbeds. Wirel. Commun. Mob. Comput. 2018, 2018, 1028578. [Google Scholar] [CrossRef]
- Pham, C.; Rahim, A.; Cousin, P. WAZIUP: A Low-Cost Infrastructure for Deploying IoT in Developing Countries. In Proceedings of the International Conference on E-Infrastructure and E-Services for Developing Countries: 8th International Conference, AFRICOMM 2016, Ouagadougou, Burkina Faso, 6–7 December 2016; Springer: Cham, Switzerland, 2018; Volume 1, pp. 135–144. [Google Scholar] [CrossRef]
- INTEL-IRRIS: Intelligent Irrigation System for Low-Cost Autonomous Water Control in Small-Scale Agriculture. Available online: https://intel-irris.eu/ (accessed on 30 July 2023).
- Dahane, A.; Benameur, R.; Kechar, B. An Innovative Smart and Sustainable Low-cost Irrigation System for Smallholder Farmers’ Communities. In Proceedings of the 2022 3rd International Conference on Embedded & Distributed Systems (EDiS), Oran, Algeria, 2–3 November 2022; pp. 37–42. [Google Scholar] [CrossRef]
- García, L.; Parra, L.; Jimenez, J.M.; Lloret, J.; Lorenz, P. IoT-based smart irrigation systems: An overview on the recent trends on sensors and iot systems for irrigation in precision agriculture. Sensors 2020, 20, 1042. [Google Scholar] [CrossRef] [PubMed]
- Zia, H.; Rehman, A.; Harris, N.R.; Fatima, S.; Khurram, M. An Experimental Comparison of IoT-Based and Traditional Irrigation Scheduling on a Flood-Irrigated Subtropical Lemon Farm. Sensors 2021, 21, 4175. [Google Scholar] [CrossRef] [PubMed]
- Park, M.H.; Chakraborty, S.; Vuong, Q.D.; Noh, D.H.; Lee, J.W.; Lee, J.U.; Choi, J.H.; Lee, W.J. Anomaly Detection Based on Time Series Data of Hydraulic Accumulator. Sensors 2022, 22, 9428. [Google Scholar] [CrossRef] [PubMed]
- Ehrhart, M.; Resch, B.; Havas, C.; Niederseer, D. A Conditional GAN for Generating Time Series Data for Stress Detection in Wearable Physiological Sensor Data. Sensors 2022, 22, 5969. [Google Scholar] [CrossRef] [PubMed]
- Rhanoui, M.; Mikram, M.; Yousfi, S.; Barzali, S. A CNN-BiLSTM Model for Document-Level Sentiment Analysis. Mach. Learn. Knowl. Extr. 2019, 1, 832–847. [Google Scholar] [CrossRef]
- Citoni, B.; Fioranelli, F.; Imran, M.A.; Abbasi, Q.H. Internet of Things and LoRaWAN-Enabled Future Smart Farming. IEEE Internet Things Mag. 2020, 2, 14–19. [Google Scholar] [CrossRef]
- Vuran, M.C.; Salam, A.; Wong, R.; Irmak, S. Internet of underground things in precision agriculture: Architecture and technology aspects. Ad Hoc Netw. 2018, 81, 160–173. [Google Scholar] [CrossRef]
- Gutierrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gandara, M.A. Automated irrigation system using a wireless sensor network and GPRS module. IEEE Trans. Instrum. Meas. 2014, 63, 166–176. [Google Scholar] [CrossRef]
- Rezk, N.G.; Hemdan, E.E.D.; Attia, A.F.; El-Sayed, A.; El-Rashidy, M.A. An efficient IoT based smart farming system using machine learning algorithms. Multimed. Tools Appl. 2021, 80, 773–797. [Google Scholar] [CrossRef]
- Goap, A.; Sharma, D.; Shukla, A.K.; Krishna, C.R. An IoT based smart irrigation management system using Machine learning and open source technologies. Comput. Electron. Agric. 2018, 155, 41–49. [Google Scholar] [CrossRef]
- Pham, C.; Rahim, A.; Hartmann, C.; Dupont, C.; Forster, J.; Markwordt, F.; Printanier, J.F.; Kechar, B.; Benkhelifa, M.; Baraka, K.; et al. Deploying Low-Cost and Full Edge-IoT/AI System for Optimizing Irrigation in Smallholder Farmers Communities. In Proceedings of the Workshops at 18th International Conference on Intelligent Environments (IE2022), Biarritz, France, 20–23 June 2022; IOS Press: Amsterdam, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Dahane, A.; Kechar, B.; Meddah, Y.; Benabdellah, O. Automated Irrigation Management Platform using a Wireless Sensor Network. In Proceedings of the 2019 Sixth International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Granada, Spain, 22–25 October 2019; pp. 610–615. [Google Scholar] [CrossRef]
- Roopaei, M.; Rad, P.; Choo, K.K.R. Cloud of things in smart agriculture: Intelligent irrigation monitoring by thermal imaging. IEEE Cloud Comput. 2017, 4, 10–15. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Gotsis, A.; Wan, S.; Sarigiannidis, P.; Nikolaidis, S.; Goudos, S.K. Smart Irrigation System for Precision Agriculture - The AREThOU5A IoT Platform. IEEE Sens. J. 2021, 21, 17539–17547. [Google Scholar] [CrossRef]
- Cheema, S.M.; Ali, M.; Pires, I.M.; Gonçalves, N.J.; Naqvi, M.H.; Hassan, M. IoAT Enabled Smart Farming: Urdu Language-Based Solution for Low-Literate Farmers. Agriculture 2022, 12, 1277. [Google Scholar] [CrossRef]
- González-Vidal, A.; Fernández-García, J.; Skarmeta, A.F. A combination of multi and univariate anomaly detection in urban irrigation systems. In Proceedings of the 2022 3rd International Conference on Embedded & Distributed Systems (EDiS), Oran, Algeria, 2–3 November 2022; pp. 31–36. [Google Scholar] [CrossRef]
- Chen, M.; Cui, Y.; Wang, X.; Xie, H.; Liu, F.; Luo, T.; Zheng, S.; Luo, Y. A reinforcement learning approach to irrigation decision-making for rice using weather forecasts. Agric. Water Manag. 2021, 250, 106838. [Google Scholar] [CrossRef]
- WAZIUP, E.V. Available online: https://www.waziup.io/documentation/wazigate/ (accessed on 30 July 2023).
- Dahane, A.; Benameur, R.; Kechar, B.; Benyamina, A. An IoT Based Smart Farming System Using Machine Learning. In Proceedings of the 2020 International Symposium on Networks, Computers and Communications (ISNCC), Montreal, QC, Canada, 20–22 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kose, U.; Prasath, V.; Mondal, M.; Podder, P.; Bharati, S. Artificial Intelligence and Smart Agriculture Applications; Auerbach Publications: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Godsey, S.E.; Marks, D.; Kormos, P.; Seyfried, M.; Enslin, C.L.; McNamara, C.; Link, T. Eleven Years of Mountain Weather, Snow, Soil Moisture and Stream Flow Data from the Rain-Snow Transition Zone—The Johnston Draw Catchment, Reynolds Creek Experimental Watershed and Critical Zone Observatory, USA. v1.1; Ag Data Commons: Charlotte, NC, USA, 2016. [Google Scholar] [CrossRef]
- Historical Hourly Weather Data 2012–2017. Available online: https://www.kaggle.com/datasets/selfishgene/historical-hourly-weather-data (accessed on 30 July 2023).
- Zyrianoff, I.D.; Neto, A.T.; Silva, D.; Cinotti, T.S.; Di Felice, M.; Kamienski, C. A Soil Moisture Calibration Service for IoT-based Smart Irrigation. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento-Bolzano, Italy, 3–5 November 2021; pp. 315–319. [Google Scholar] [CrossRef]



| Equipements | Components | Price |
|---|---|---|
| Gateway | Raspberry Pi 3 B+ + SD card 16 GB | USD 125 |
| IoT device | Arduino Mega card + Arduino UNO REV3 LCD display nokia + LCD display I2C LEDs + jumpers | USD 63 |
| Antenna and related components | We use NRF module with antenna Solar panel ZW85X115-12 + solar panel 6 V amplifier + power supply 9 V + Power supply 12 V | USD 31 |
| Physical sensors | DHT22 + moisture sensor V2.0 Water level sensor + light sensor | USD 17 |
| Actuators | Water pump + relay switch Water flow sensor | USD 24 |
| Total | USD 260 |
| Datasets | Parameters | Columns | Unity | Scale | Missing Data | Traning Data | Testing Data |
|---|---|---|---|---|---|---|---|
| [30] | Soil Moisture | sm_5 | % | from 6 to 39.7 | 719 | 27,216 | 3024 |
| sm_20 | % | from 2.79 to 30.1 | 719 | 27,216 | 3024 | ||
| [31] | Air-temperature | New York | kelvin | from 250.77 to 310.24 | 793 | 14,287 | 1587 |
| Philadelphia | kelvin | from 250.39 to 308.0 | 3 | 31,104 | 3456 | ||
| [31] | Air-humidity | New York | % | from 10 to 100 | 1624 | 15,552 | 1728 |
| Philadelphia | % | from 10 to 100 | 624 | 15,552 | 1728 |
| Layer | Output Size |
|---|---|
| Input | 6 |
| Conv1D | 3 × 32 |
| Dropout | 3 × 32 |
| Conv1D | 2 × 16 |
| Conv1DTranspose | 4 × 16 |
| Dropout | 4 × 16 |
| Conv1DTranspose | 8 × 32 |
| Conv1DTranspose | 8 × 1 |
| Flatten | 8 |
| FC | 6 |
| Layer | Output Size |
|---|---|
| Discriminator | |
| Input | 6 |
| Conv1D | 5 × 32 |
| LeakyReLU | 5 × 32 |
| Conv1D | 3 × 64 |
| Batch Normalization | 3 × 64 |
| LeakyReLU | 3 × 64 |
| LSTM | 16 |
| FC (Sigmoid) | 1 |
| Generator | |
| Input | 6 |
| Conv1D | 5 × 32 |
| LeakyReLU | 5 × 32 |
| LSTM | 128 |
| FC | 6 |
| Parameters | Columns | AE Evaluation Metrics | GAN Evaluation Metrics | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F1 | Accuracy | Precision | Recall | F1 | ||
| Soil moisture | sm_5 | 0.93 | 0.93 | 0.94 | 0.93 | 0.875 | 0.875 | 1.0 | 0.8888 |
| sm_20 | 0.935 | 0.9306 | 0.94 | 0.935 | 0.635 | 0.965 | 0.28 | 0.434 | |
| Air temperature | New York | 0.932 | 0.8802 | 1.0 | 0.936 | 0.75 | 0.93 | 0.54 | 0.6835 |
| Philadelphia | 0.9595 | 0.9563 | 0.963 | 0.959 | 0.6785 | 0.92 | 0.391 | 0.548 | |
| Air humidity | New York | 0.9735 | 0.949 | 1.0 | 0.974 | 0.6905 | 0.7671 | 0.547 | 0.638 |
| Philadelphia | 0.976 | 0.954 | 1.0 | 0.976 | 0.571 | 0.543 | 0.895 | 0.6759 | |
| Layer | Output Size |
|---|---|
| Input | 24 |
| Conv1D | 12 × 32 |
| MaxPooling1D | 6 × 32 |
| Bidirectional LSTM | 256 |
| FC | 24 |
| Parameter | Columns | Corrected Anomalies | Evaluation Metrics | ||
|---|---|---|---|---|---|
| MSE | RMSE | MAE | |||
| Soil moisture | sm_5 | 0 | 1.2273 | 1.1078 | 0.999 |
| sm_5 | 1025 | 0.272243 | 0.52176 | 0.4703 | |
| sm_20 | 0 | 1.70128 | 1.3043 | 1.234 | |
| sm_20 | 716 | 0.8740 | 0.9348 | 0.861 | |
| Parameter | Columns | Corrected Anomalies | Evaluation Metrics | ||
|---|---|---|---|---|---|
| MSE | RMSE | MAE | |||
| Air temperature | New York | 0 | 20.1318 | 4.4868 | 3.497 |
| New York | 1140 | 17.7633 | 4.2146 | 3.436 | |
| Philadelphia | 0 | 16.2342 | 4.0291 | 3.3 | |
| Philadelphia | 519 | 4.635611 | 2.1530 | 1.648 | |
| Parameter | Columns | Corrected Anomalies | Evaluation Metrics | ||
|---|---|---|---|---|---|
| MSE | RMSE | MAE | |||
| Air humidity | New York | 0 | 200.26 | 14.15 | 10.73 |
| New York | 145 | 186.104 | 13.642 | 10.57 | |
| Philadelphia | 0 | 219.91 | 14.829 | 11.53 | |
| Philadelphia | 86 | 217.485 | 14.747 | 11.35 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benameur, R.; Dahane, A.; Kechar, B.; Benyamina, A.E.H. An Innovative Smart and Sustainable Low-Cost Irrigation System for Anomaly Detection Using Deep Learning. Sensors 2024, 24, 1162. https://doi.org/10.3390/s24041162
Benameur R, Dahane A, Kechar B, Benyamina AEH. An Innovative Smart and Sustainable Low-Cost Irrigation System for Anomaly Detection Using Deep Learning. Sensors. 2024; 24(4):1162. https://doi.org/10.3390/s24041162
Chicago/Turabian StyleBenameur, Rabaie, Amine Dahane, Bouabdellah Kechar, and Abou El Hassan Benyamina. 2024. "An Innovative Smart and Sustainable Low-Cost Irrigation System for Anomaly Detection Using Deep Learning" Sensors 24, no. 4: 1162. https://doi.org/10.3390/s24041162
APA StyleBenameur, R., Dahane, A., Kechar, B., & Benyamina, A. E. H. (2024). An Innovative Smart and Sustainable Low-Cost Irrigation System for Anomaly Detection Using Deep Learning. Sensors, 24(4), 1162. https://doi.org/10.3390/s24041162