
Projection-Angle-Sensor-Assisted X-ray Computed Tomography for Cylindrical Lithium-Ion Batteries


Abstract
1. Introduction
2. X-ray CT for Cylindrical Lithium-Ion Batteries
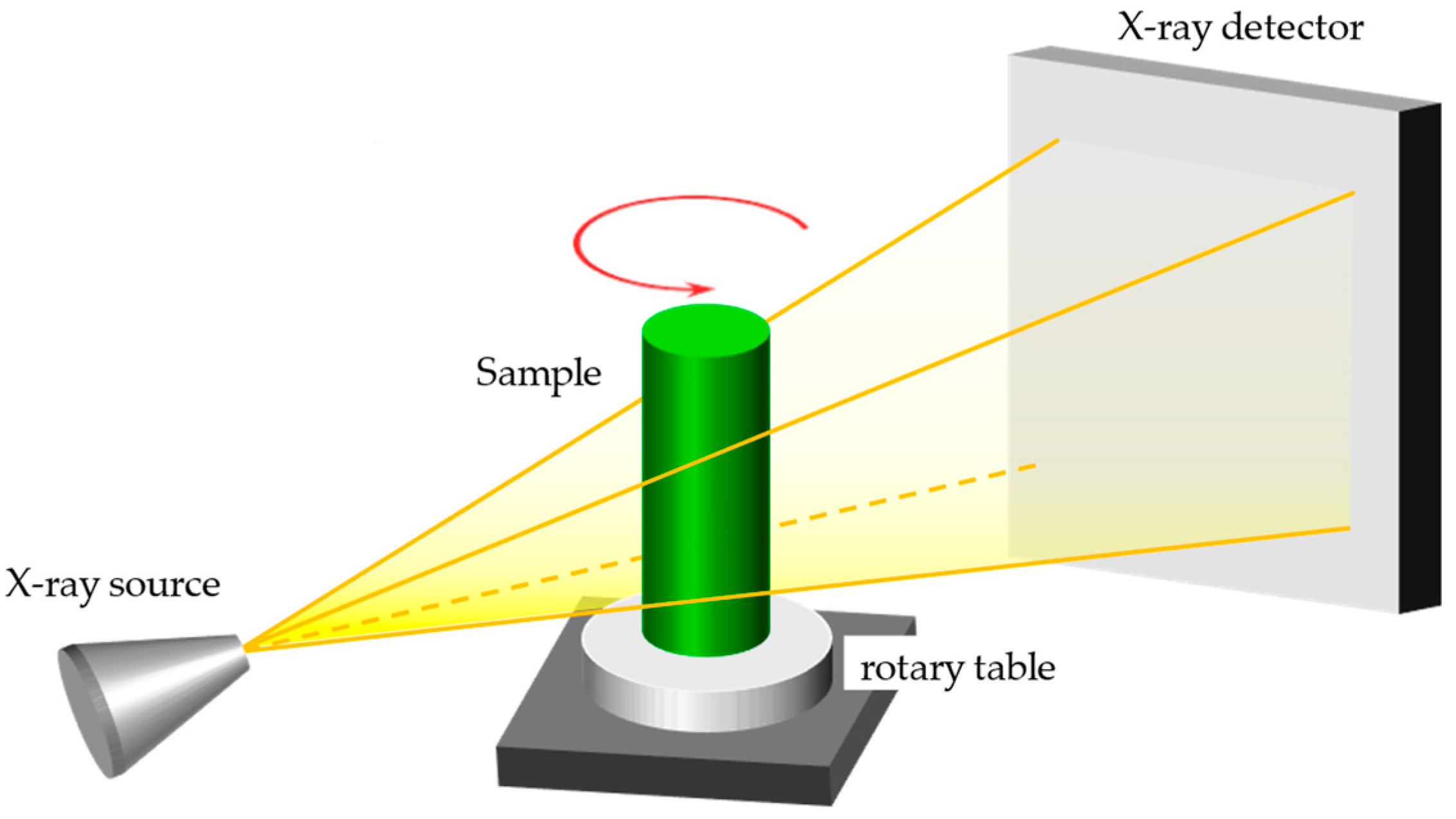
2.1. Basic Principle of X-ray CT
2.2. Three-Dimensional Reconstruction Algorithm
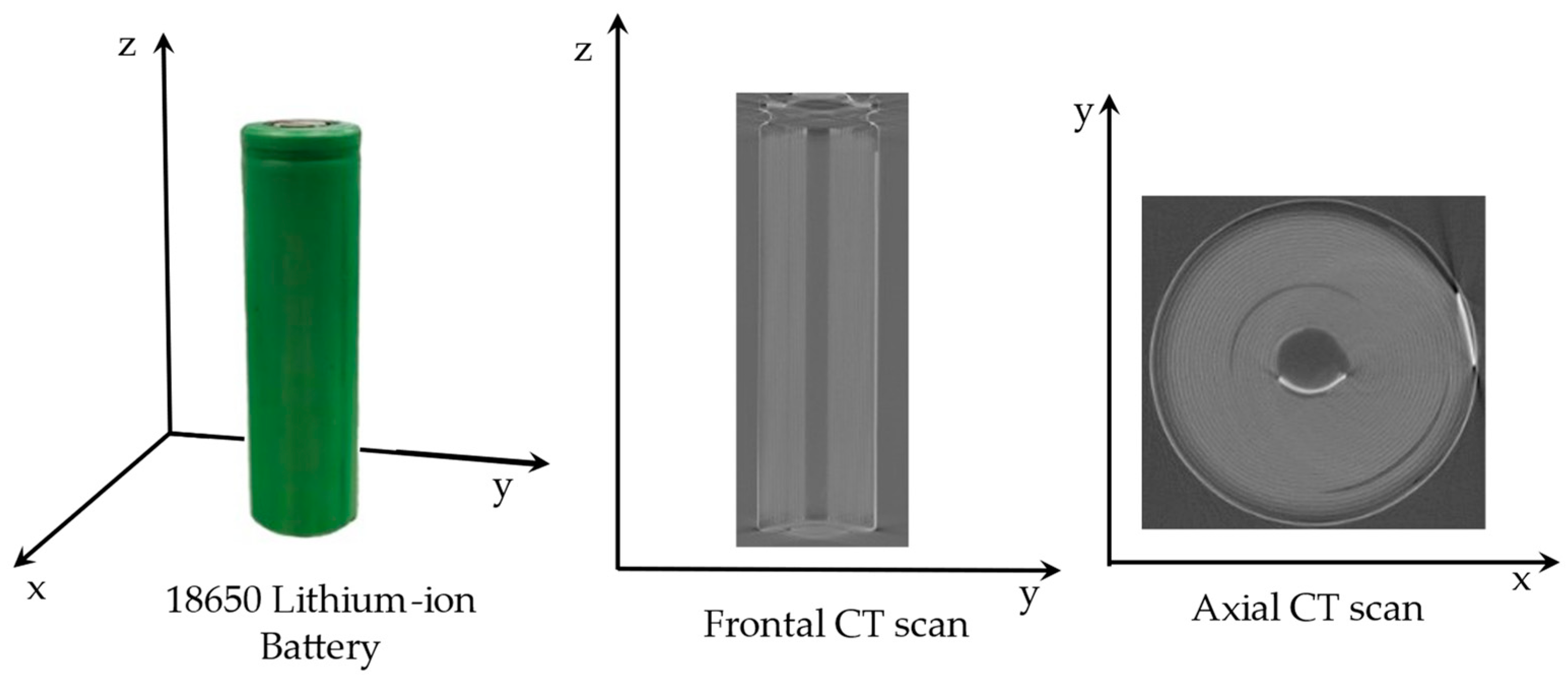
2.3. XCT Detection of Cylindrical Lithium-Ion Batteries
3. CT Imaging Quality Improvements Using Projection Angle Sensors
3.1. Projection Angles in CT Imaging
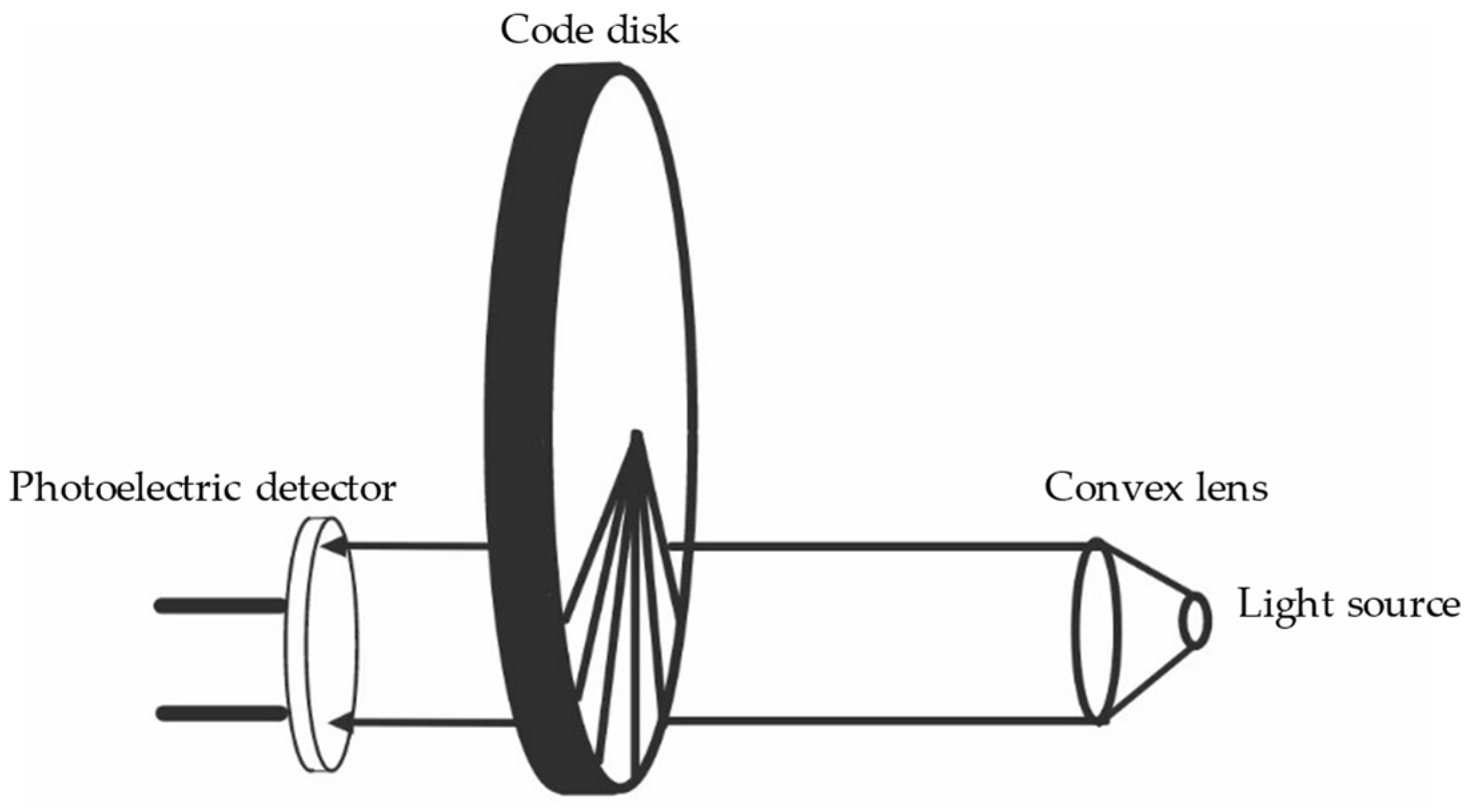
3.2. Projection Angle Sensors
4. Laboratory Experiment
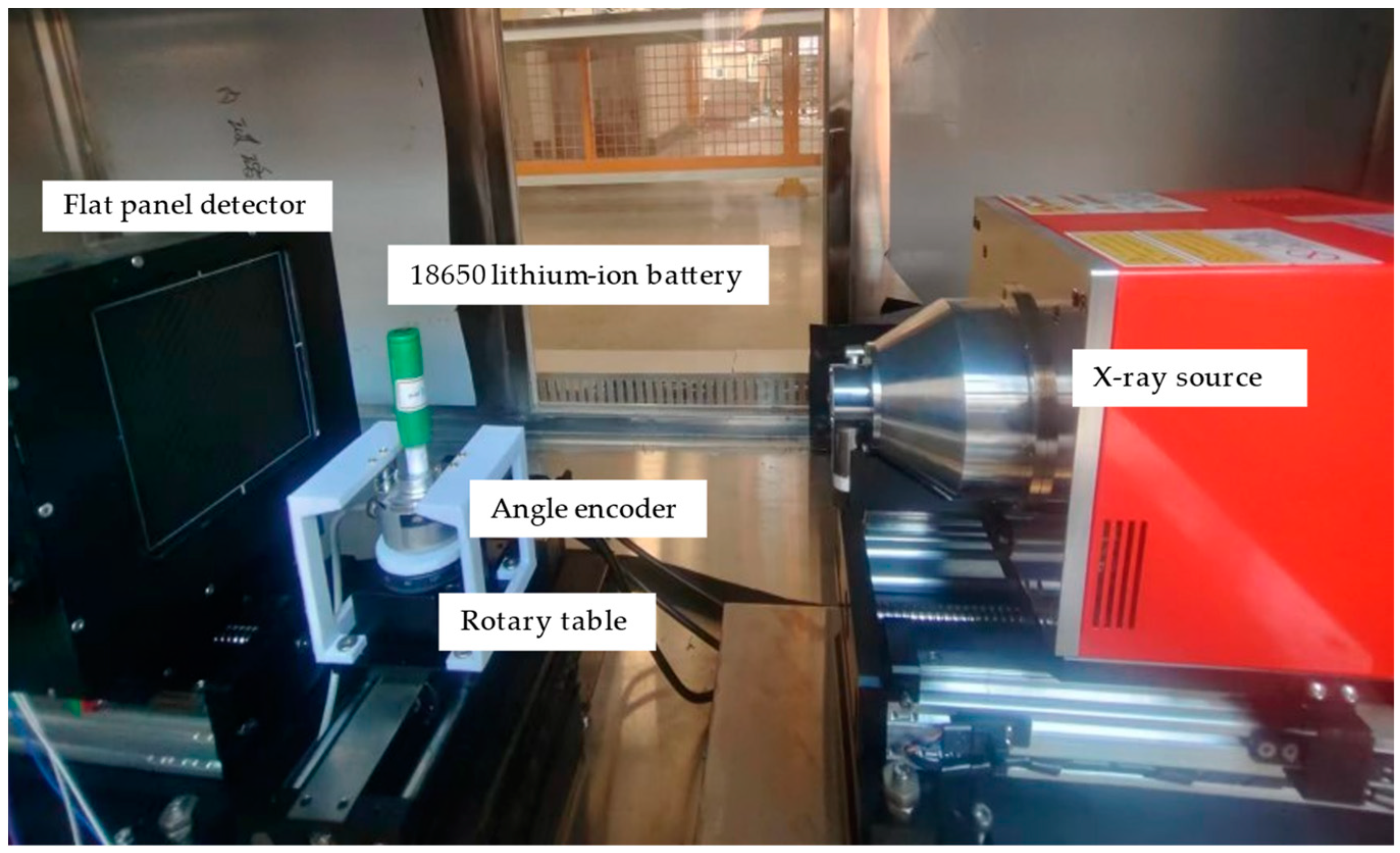
4.1. Test Platform Setup
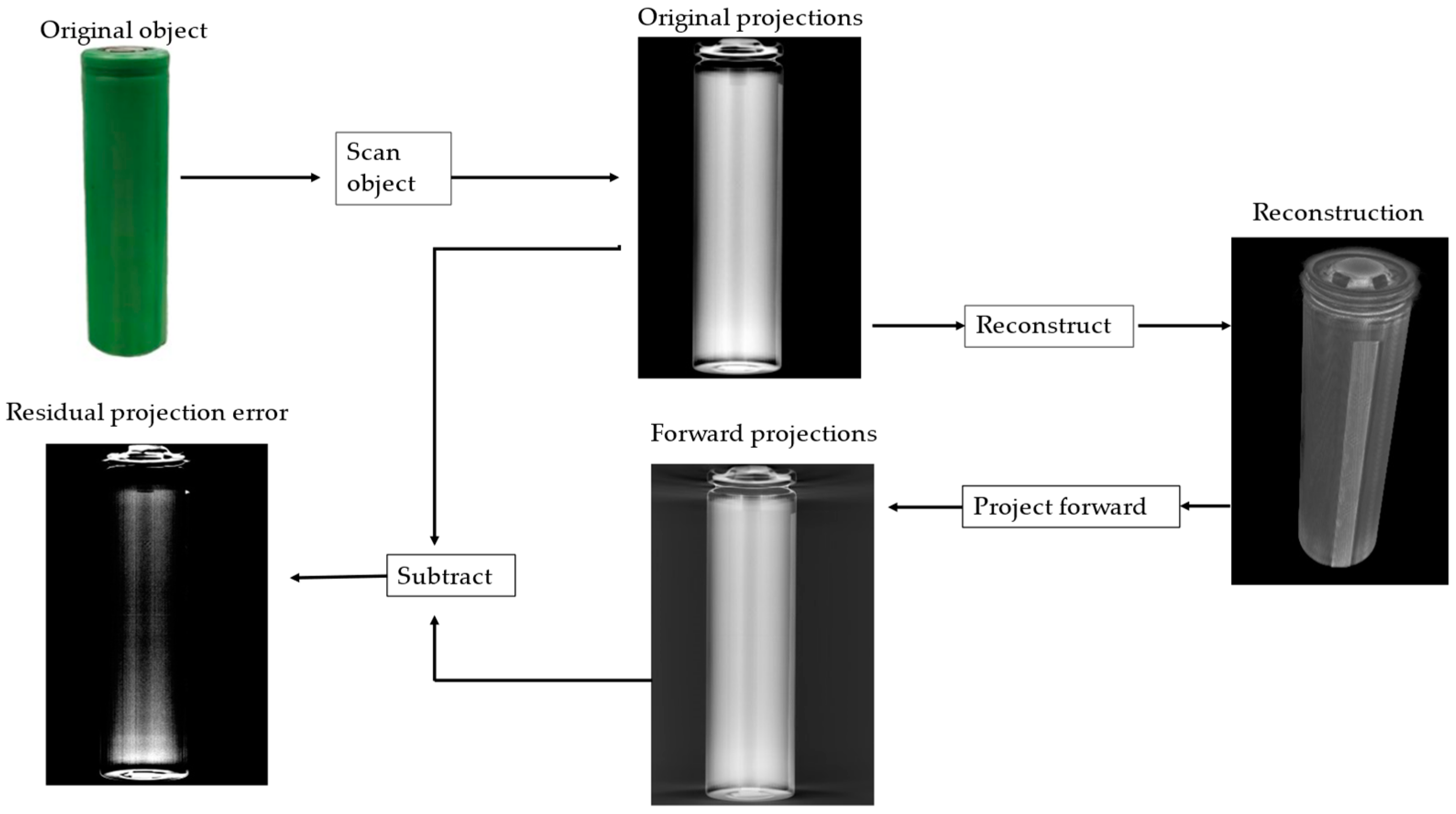
4.2. Reconstruction Quality Metric
4.3. Image Processing
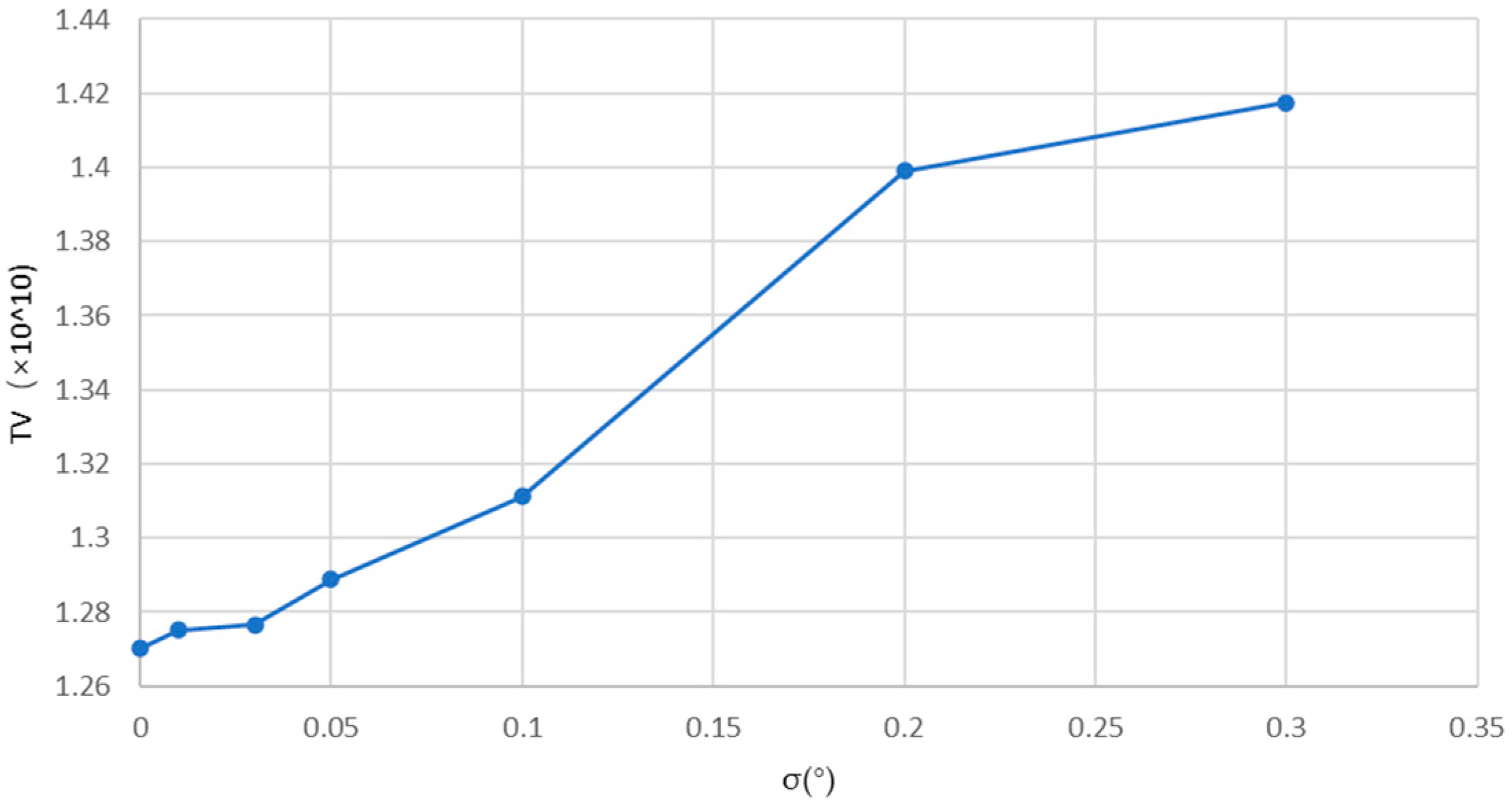
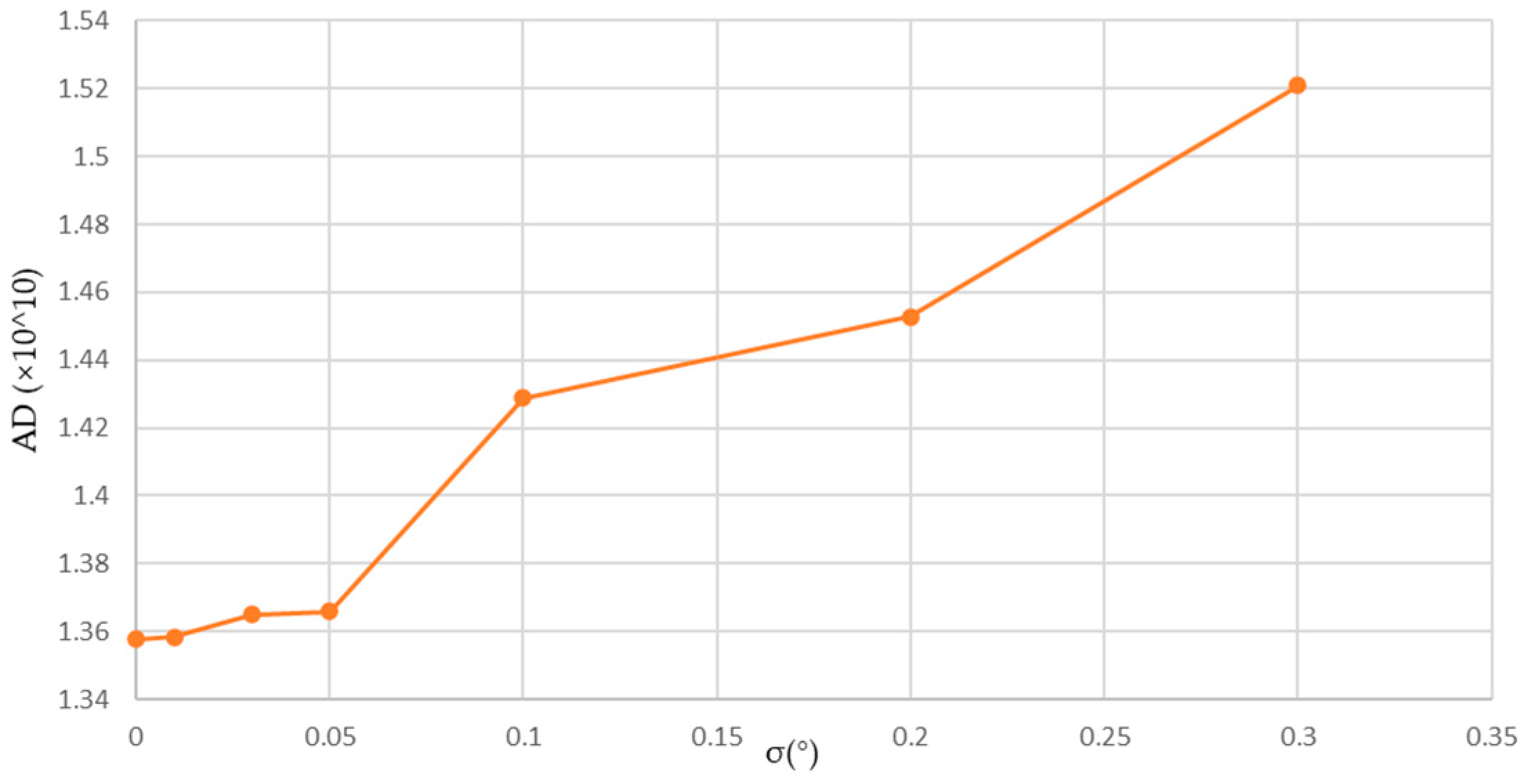
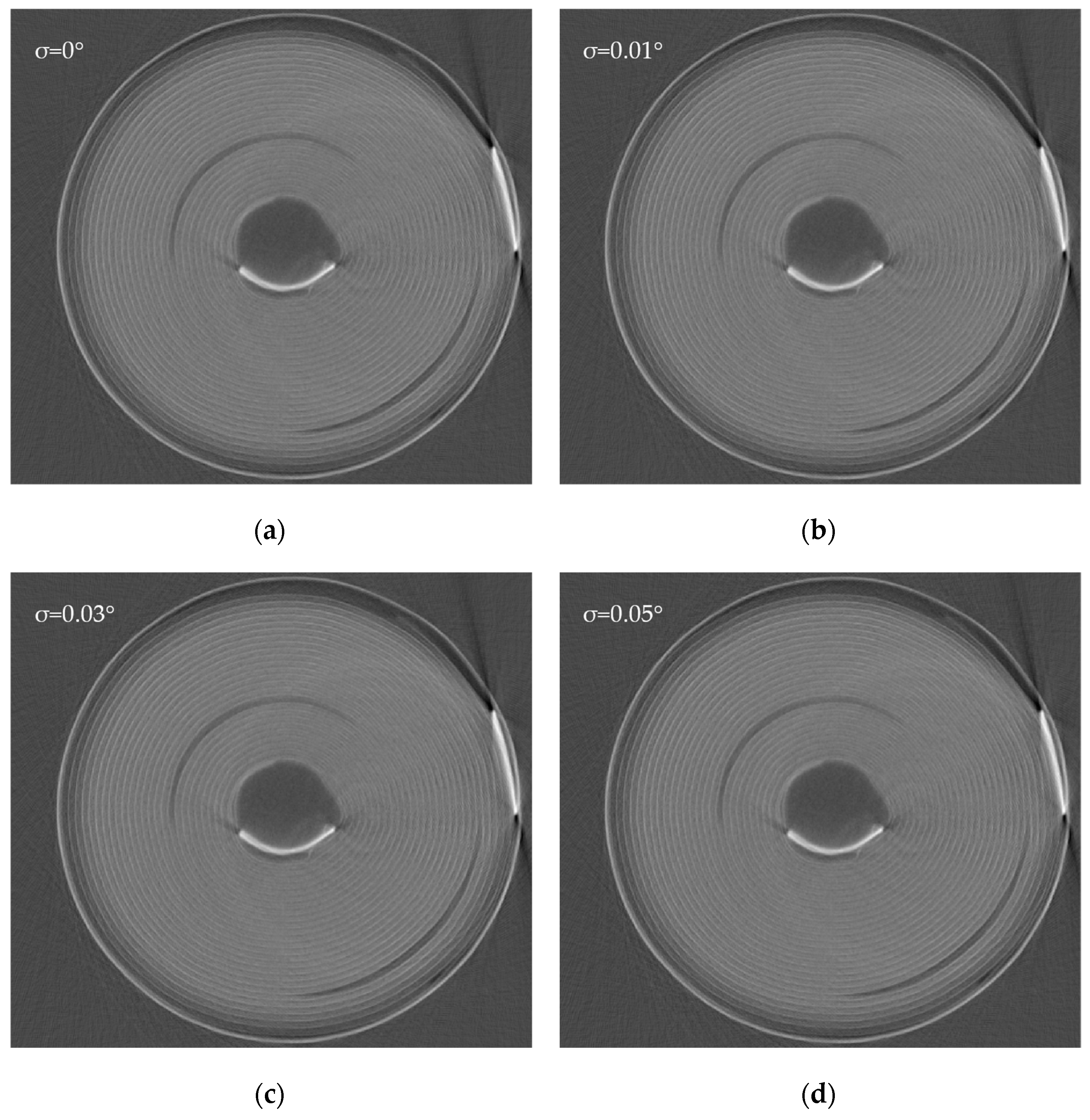
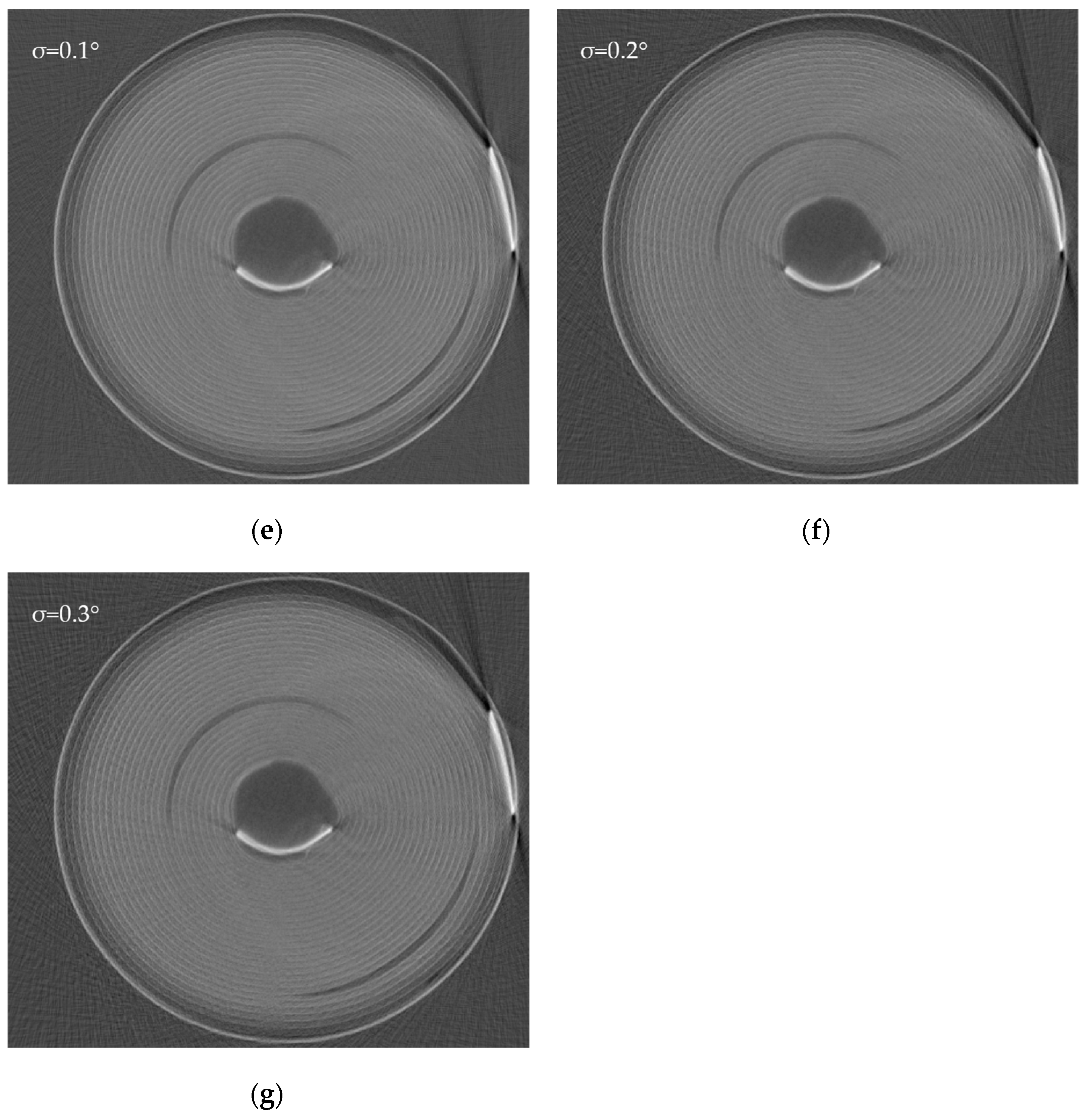
4.4. CT Imaging with Different Projection Angle Errors
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, W.; Brown, S.; Leach, R. An overview of industrial X-ray computed tomography. NPL Rep. 2012, ENG 32. Available online: https://eprintspublications.npl.co.uk/5385/ (accessed on 21 January 2024).
- Villarraga-Gómez, H.; Herazo, E.L.; Smith, S.T. X-ray computed tomography: From medical imaging to dimensional metrology. Precis. Eng. 2019, 60, 544–569. [Google Scholar] [CrossRef]
- Withers, P.J.; Bouman, C.; Carmignato, S.; Cnudde, V.; Grimaldi, D.; Hagen, C.K.; Maire, E.; Manley, M.; Du Plessis, A.; Stock, S.R. X-ray computed tomography. Nat. Rev. Methods Primers 2021, 1, 18. [Google Scholar] [CrossRef]
- Pietsch, P.; Wood, V. X-ray tomography for lithium ion battery research: A practical guide. Annu. Rev. Mater. Res. 2017, 47, 451–479. [Google Scholar] [CrossRef]
- Le Houx, J.; Kramer, D. X-ray tomography for lithium ion battery electrode characterisation—A review. Energy Rep. 2021, 7, 9–14. [Google Scholar] [CrossRef]
- Wu, Y.; Saxena, S.; Xing, Y.; Wang, Y.; Li, C.; Yung, W.K.; Pecht, M. Analysis of manufacturing-induced defects and structural deformations in lithium-ion batteries using computed tomography. Energies 2018, 11, 925. [Google Scholar] [CrossRef]
- Ju, L.; Li, X.; Geng, G.; Jiang, Q. Degradation diagnosis of lithium-ion batteries considering internal gas evolution. J. Energy Storage 2023, 71, 108084. [Google Scholar] [CrossRef]
- Finegan, D.P.; Scheel, M.; Robinson, J.B.; Tjaden, B.; Hunt, I.; Mason, T.J.; Millichamp, J.; Di Michiel, M.; Offer, G.J.; Hinds, G. In-operando high-speed tomography of lithium-ion batteries during thermal runaway. Nat. Commun. 2015, 6, 6924. [Google Scholar] [CrossRef]
- Eastwood, D.; Bradley, R.; Tariq, F.; Cooper, S.; Taiwo, O.; Gelb, J.; Merkle, A.; Brett, D.; Brandon, N.; Withers, P. The application of phase contrast X-ray techniques for imaging Li-ion battery electrodes. Nucl. Instrum. Methods Phys. Res. Sect. B Beam Interact. Mater. At. 2014, 324, 118–123. [Google Scholar] [CrossRef]
- Finegan, D.P.; Scheel, M.; Robinson, J.B.; Tjaden, B.; Di Michiel, M.; Hinds, G.; Brett, D.J.; Shearing, P.R. Investigating lithium-ion battery materials during overcharge-induced thermal runaway: An operando and multi-scale X-ray CT study. Phys. Chem. Chem. Phys. 2016, 18, 30912–30919. [Google Scholar] [CrossRef]
- Pietsch, P.; Westhoff, D.; Feinauer, J.; Eller, J.; Marone, F.; Stampanoni, M.; Schmidt, V.; Wood, V. Quantifying microstructural dynamics and electrochemical activity of graphite and silicon-graphite lithium ion battery anodes. Nat. Commun. 2016, 7, 12909. [Google Scholar] [CrossRef]
- Du Plessis, A.; Tshibalanganda, M.; Le Roux, S. Not all scans are equal: X-ray tomography image quality evaluation. Mater. Today Commun. 2020, 22, 100792. [Google Scholar] [CrossRef]
- Stolfi, A.; De Chiffre, L.; Kasperl, S. Error sources. In Industrial X-ray Computed Tomography; Springer: Cham, Switzerland, 2018; pp. 143–184. [Google Scholar] [CrossRef]
- Park, H.S.; Chung, Y.E.; Seo, J.K. Computed tomographic beam-hardening artefacts: Mathematical characterization and analysis. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140388. [Google Scholar] [CrossRef] [PubMed]
- Davis, G.; Elliott, J. Artefacts in X-ray microtomography of materials. Mater. Sci. Technol. 2006, 22, 1011–1018. [Google Scholar] [CrossRef]
- Barutcu, S.; Aslan, S.; Katsaggelos, A.K.; Gürsoy, D. Limited-angle computed tomography with deep image and physics priors. Sci. Rep. 2021, 11, 17740. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Xia, W.; Lu, J.; Zhang, Y. A review of deep learning ct reconstruction from incomplete projection data. IEEE Trans. Radiat. Plasma Med. Sci. 2023, 8, 138–152. [Google Scholar] [CrossRef]
- Cheng, C.-C.; Ching, Y.-T.; Ko, P.-H.; Hwu, Y. Correction of center of rotation and projection angle in synchrotron X-ray computed tomography. Sci. Rep. 2018, 8, 9884. [Google Scholar] [CrossRef] [PubMed]
- Dayani, S.; Markötter, H.; Schmidt, A.; Widjaja, M.P.; Bruno, G. Multi-level X-ray computed tomography (XCT) investigations of commercial lithium-ion batteries from cell to particle level. J. Energy Storage 2023, 66, 107453. [Google Scholar] [CrossRef]
- Gelb, J.; Finegan, D.P.; Brett, D.J.; Shearing, P.R. Multi-scale 3D investigations of a commercial 18650 Li-ion battery with correlative electron-and X-ray microscopy. J. Power Sources 2017, 357, 77–86. [Google Scholar] [CrossRef]
- Goris, B.; Van den Broek, W.; Batenburg, K.J.; Mezerji, H.H.; Bals, S. Electron tomography based on a total variation minimization reconstruction technique. Ultramicroscopy 2012, 113, 120–130. [Google Scholar] [CrossRef]
- Sidky, E.Y.; Pan, X. Image reconstruction in circular cone-beam computed tomography by constrained, total-variation minimization. Phys. Med. Biol. 2008, 53, 4777. [Google Scholar] [CrossRef]
- Roelandts, T.; Batenburg, K.J.; den Dekker, A.J.; Sijbers, J. The reconstructed residual error: A novel segmentation evaluation measure for reconstructed images in tomography. Comput. Vis. Image Underst. 2014, 126, 28–37. [Google Scholar] [CrossRef][Green Version]
- Hermanek, P.; Rathore, J.S.; Aloisi, V.; Carmignato, S. Principles of X-ray computed tomography. In Industrial X-ray Computed Tomography; Springer: Cham, Switzerland, 2018; pp. 25–67. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Wang, B.; Pan, B. Effect of the number of projections in X-ray CT imaging on image quality and digital volume correlation measurement. Measurement 2022, 194, 111061. [Google Scholar]
- Feldkamp, L.A.; Davis, L.C.; Kress, J.W. Practical cone-beam algorithm. Josa A 1984, 1, 612–619. [Google Scholar] [CrossRef]
- Baazouzi, S.; Feistel, N.; Wanner, J.; Landwehr, I.; Fill, A.; Birke, K.P. Design, Properties, and Manufacturing of Cylindrical Li-Ion Battery Cells—A Generic Overview. Batteries 2023, 9, 309. [Google Scholar] [CrossRef]
- Wang, H.; Watkins, T.R.; Simunovic, S.; Bingham, P.R.; Allu, S.; Turner, J.A. Fragmentation of copper current collectors in Li-ion batteries during spherical indentation. J. Power Sources 2017, 364, 432–436. [Google Scholar] [CrossRef]
- Waldmann, T.; Gorse, S.; Samtleben, T.; Schneider, G.; Knoblauch, V.; Wohlfahrt-Mehrens, M. A mechanical aging mechanism in lithium-ion batteries. J. Electrochem. Soc. 2014, 161, A1742. [Google Scholar] [CrossRef]
- Blazek, P.; Westenberger, P.; Erker, S.; Brinek, A.; Zikmund, T.; Rettenwander, D.; Wagner, N.P.; Keckes, J.; Kaiser, J.; Kazda, T. Axially and radially inhomogeneous swelling in commercial 18650 Li-ion battery cells. J. Energy Storage 2022, 52, 104563. [Google Scholar] [CrossRef]
- Ferrucci, M.; Leach, R.K.; Giusca, C.; Carmignato, S.; Dewulf, W. Towards geometrical calibration of X-ray computed tomography systems—A review. Meas. Sci. Technol. 2015, 26, 092003. [Google Scholar] [CrossRef]
- Wojtko, K.; Frackowiak, P. Trends in the development of rotary tables with different types of gears. In Advances in Manufacturing; Springer: Cham, Switzerland, 2018; pp. 385–394. [Google Scholar]
- Dassanayake, K.M.; Tsutsumi, M.; Sato, R.; Ito, H. Motion characteristics of high performance rotary tables for CNC machines. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Boston, MS, USA, 6 November 2008; pp. 27–36. [Google Scholar]
- Kumar, A.A.; George, B.; Mukhopadhyay, S.C. Technologies and applications of angle sensors: A review. IEEE Sens. J. 2020, 21, 7195–7206. [Google Scholar] [CrossRef]
- Das, S.; Chakraborty, B. Design and realization of an optical rotary sensor. IEEE Sens. J. 2018, 18, 2675–2681. [Google Scholar] [CrossRef]
- Schweber, B. Options abound when selecting a sensor for motor feedback. Electron. Inf. Update 2017, 13, 18–20. [Google Scholar]
- Zhao, C.; Wan, Q.; Lu, X.; Du, Y. Automatic real-time adjustment of pulse signal of incremental photoelectric encoder. Opt. Rev. 2017, 24, 686–692. [Google Scholar] [CrossRef]
- Kim, J.-A.; Kim, J.W.; Kang, C.-S.; Jin, J.; Eom, T.B. Absolute angle measurement using a phase-encoded binary graduated disk. Measurement 2016, 80, 288–293. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Chen, B.; Xiao, P.; Chen, X.; Cai, N.; Ling, B.W.-K. Absolute optical imaging position encoder. Measurement 2015, 67, 42–50. [Google Scholar] [CrossRef]
- Biguri, A.; Dosanjh, M.; Hancock, S.; Soleimani, M. TIGRE: A MATLAB-GPU toolbox for CBCT image reconstruction. Biomed. Phys. Eng. Express 2016, 2, 055010. [Google Scholar] [CrossRef]
- Schindelin, J.; Arganda-Carreras, I.; Frise, E.; Kaynig, V.; Longair, M.; Pietzsch, T.; Preibisch, S.; Rueden, C.; Saalfeld, S.; Schmid, B. Fiji: An open-source platform for biological-image analysis. Nat. Methods 2012, 9, 676–682. [Google Scholar] [CrossRef] [PubMed]
- Pukelsheim, F. The three sigma rule. Am. Stat. 1994, 48, 88–91. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| σ | 0° | 0.01° | 0.03° | 0.05° | 0.1° | 0.2° | 0.3° |
|---|---|---|---|---|---|---|---|
| TV (×107) | 1.2701 | 1.2751 | 1.2765 | 1.2888 | 1.3112 | 1.3991 | 1.4175 |
| AD (×1010) | 1.3577 | 1.3583 | 1.3651 | 1.3658 | 1.4289 | 1.4528 | 1.5209 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, J.; Ju, L.; Jiang, Q.; Geng, G. Projection-Angle-Sensor-Assisted X-ray Computed Tomography for Cylindrical Lithium-Ion Batteries. Sensors 2024, 24, 1102. https://doi.org/10.3390/s24041102
Dong J, Ju L, Jiang Q, Geng G. Projection-Angle-Sensor-Assisted X-ray Computed Tomography for Cylindrical Lithium-Ion Batteries. Sensors. 2024; 24(4):1102. https://doi.org/10.3390/s24041102
Chicago/Turabian StyleDong, Jiawei, Lingling Ju, Quanyuan Jiang, and Guangchao Geng. 2024. "Projection-Angle-Sensor-Assisted X-ray Computed Tomography for Cylindrical Lithium-Ion Batteries" Sensors 24, no. 4: 1102. https://doi.org/10.3390/s24041102
APA StyleDong, J., Ju, L., Jiang, Q., & Geng, G. (2024). Projection-Angle-Sensor-Assisted X-ray Computed Tomography for Cylindrical Lithium-Ion Batteries. Sensors, 24(4), 1102. https://doi.org/10.3390/s24041102