


Determination of Gait Events and Temporal Gait Parameters for Persons with a Knee–Ankle–Foot Orthosis
 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
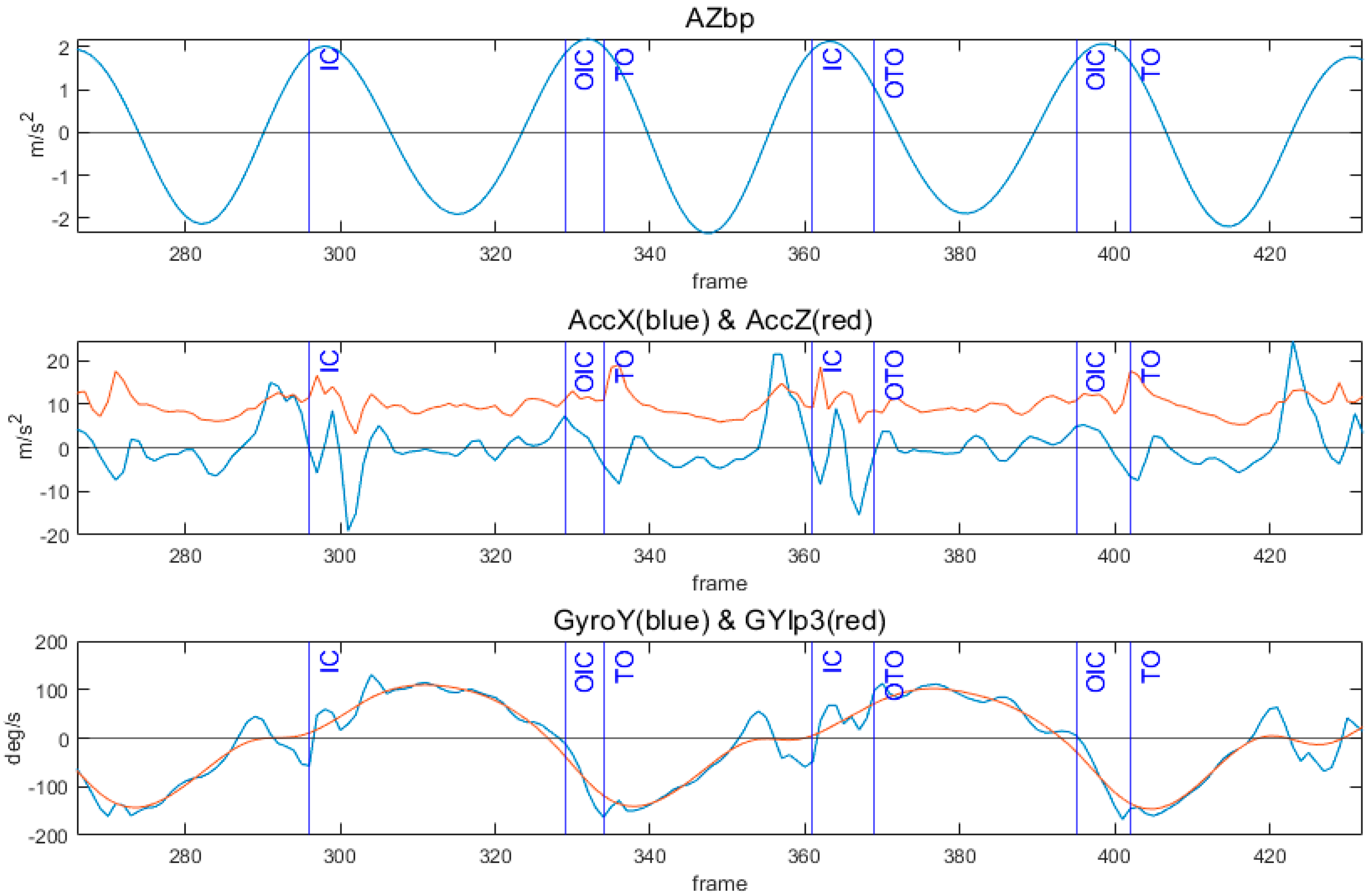
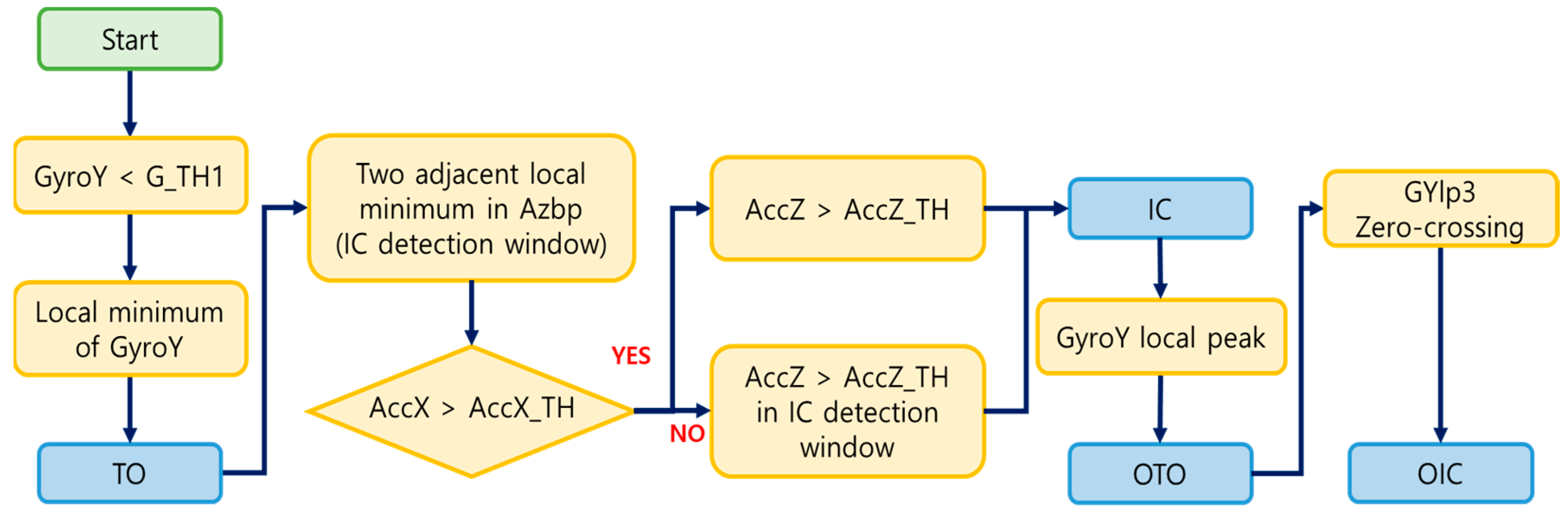
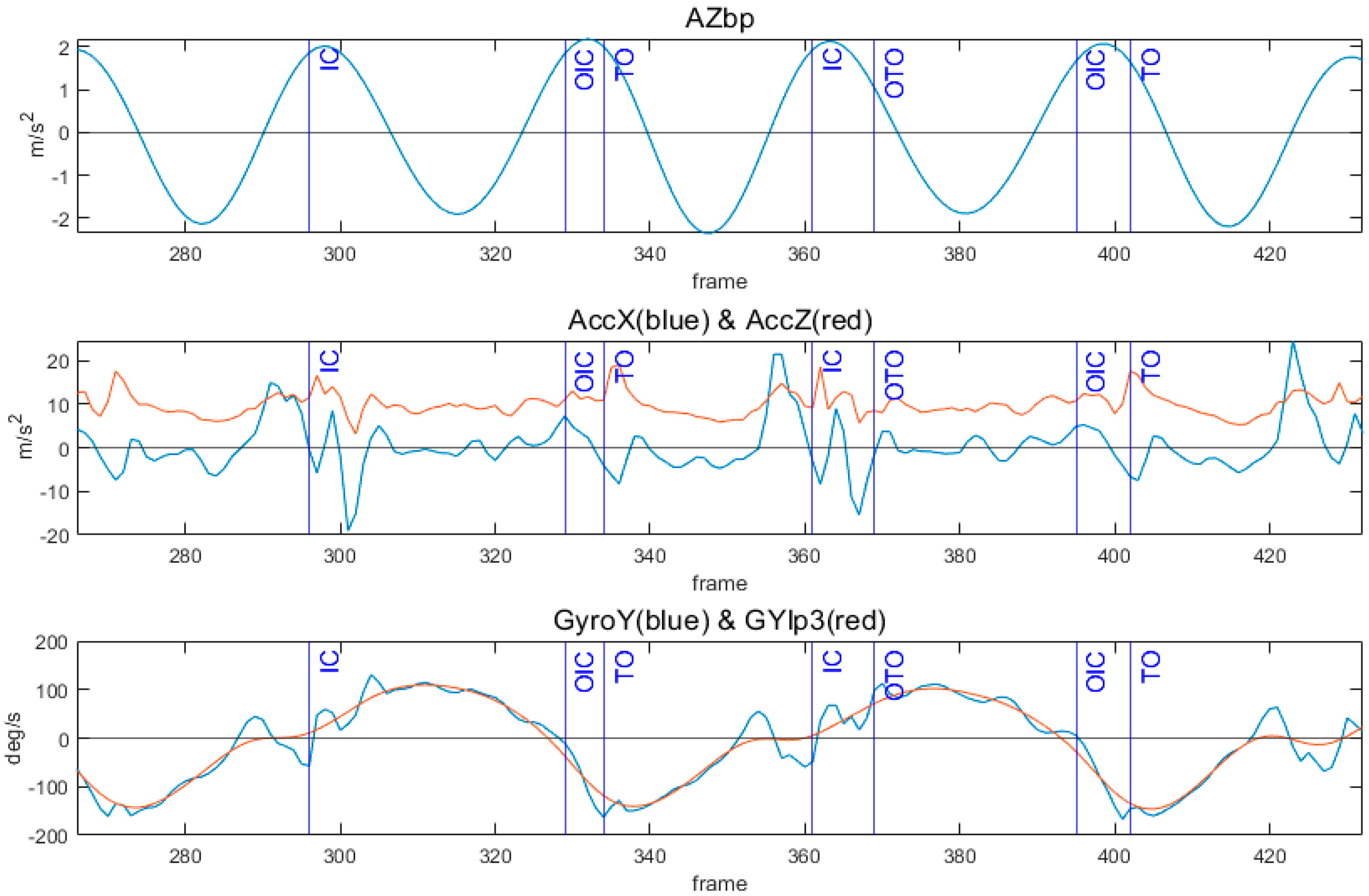
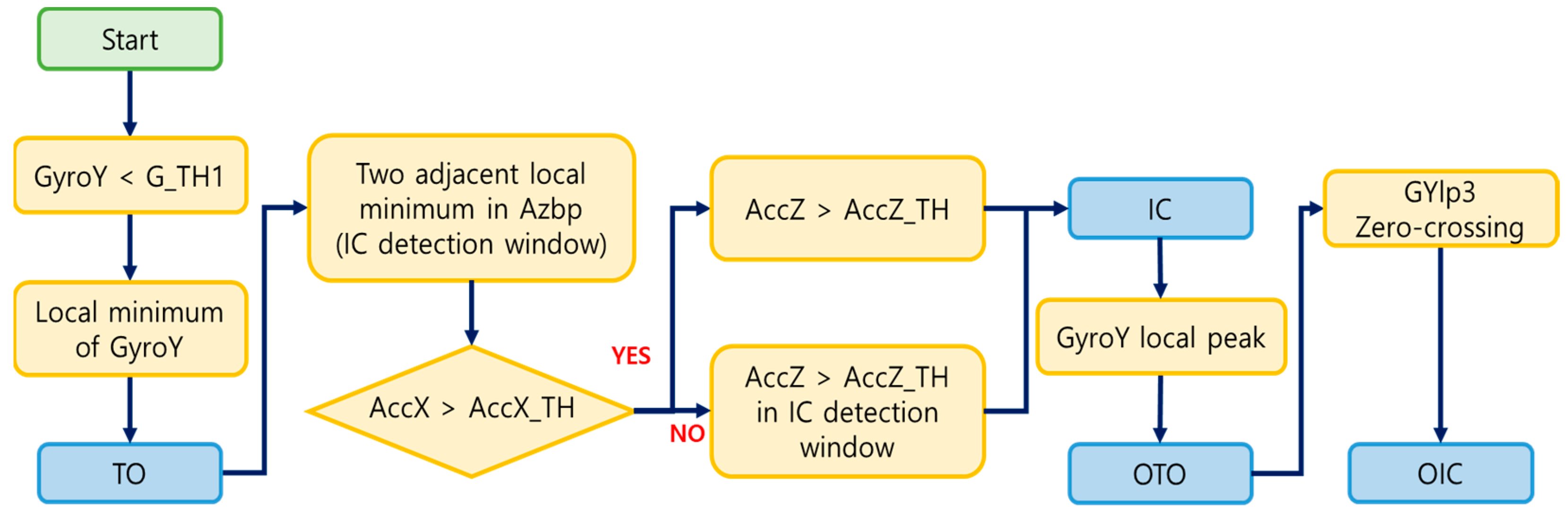
2.1. Gait Event Detection Algorithm
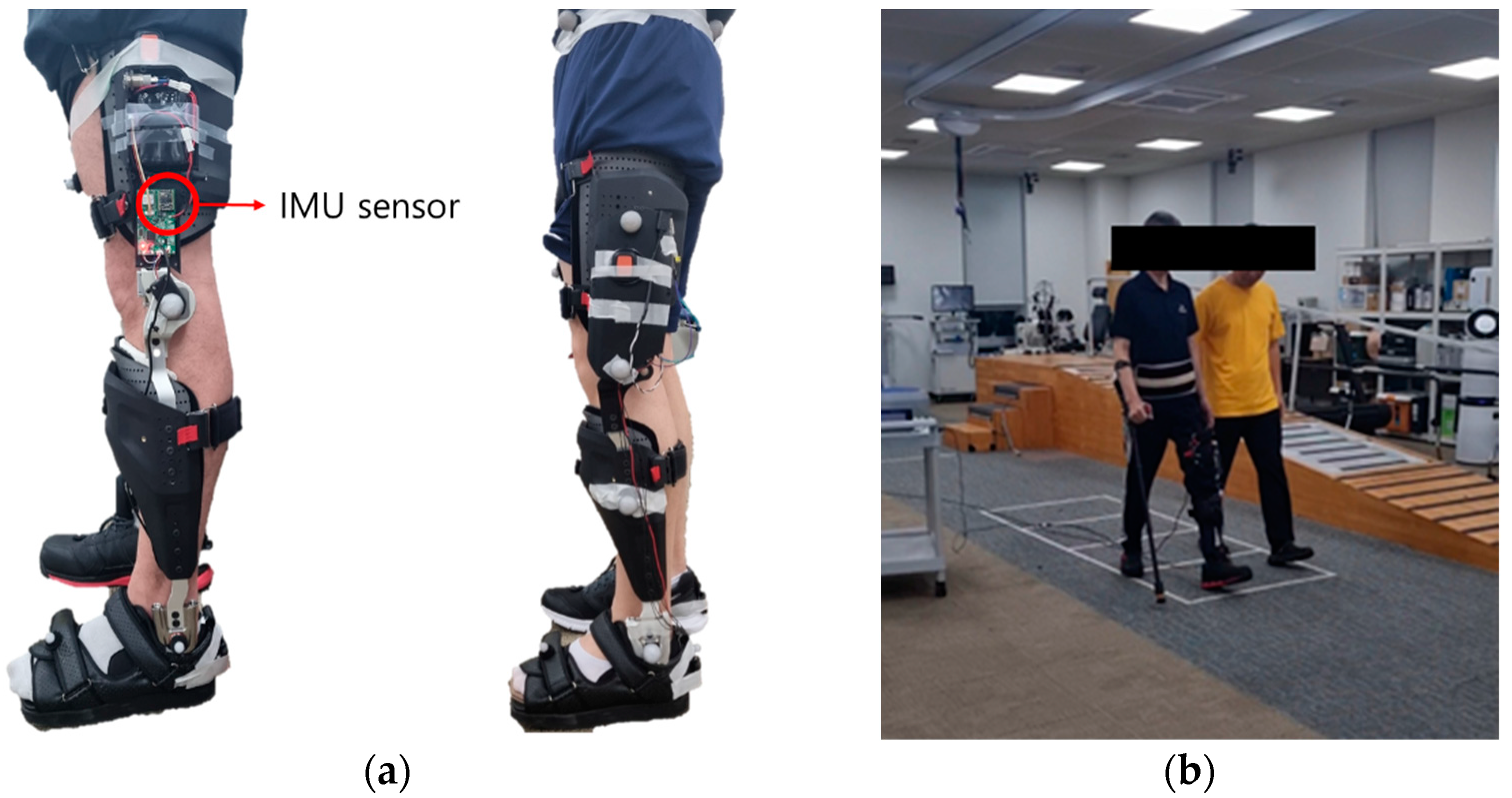
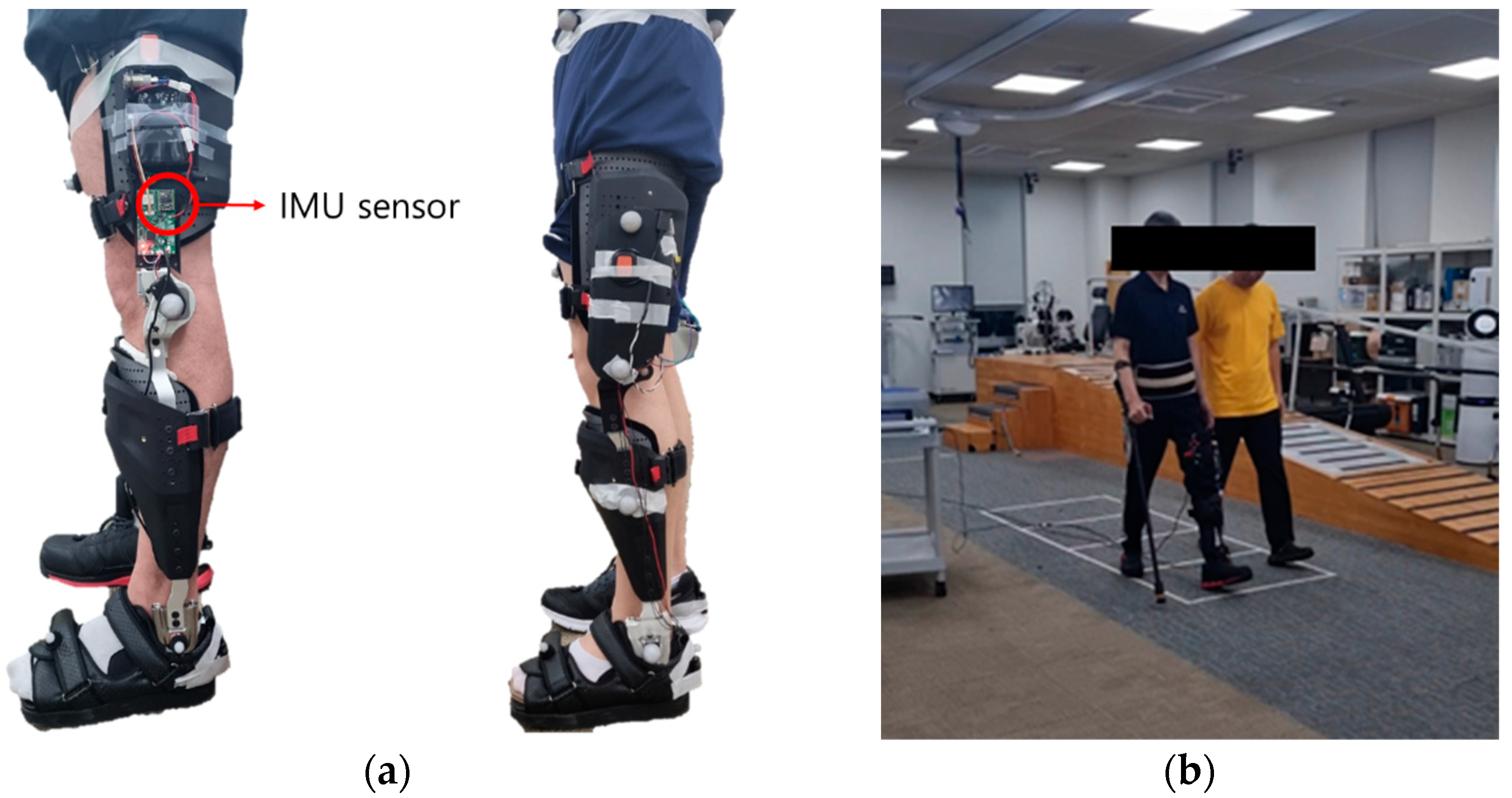
2.2. Validation of the Algorithm Using Data with EM KAFO
2.3. Evaluation of Gait Event Detection Algorithm
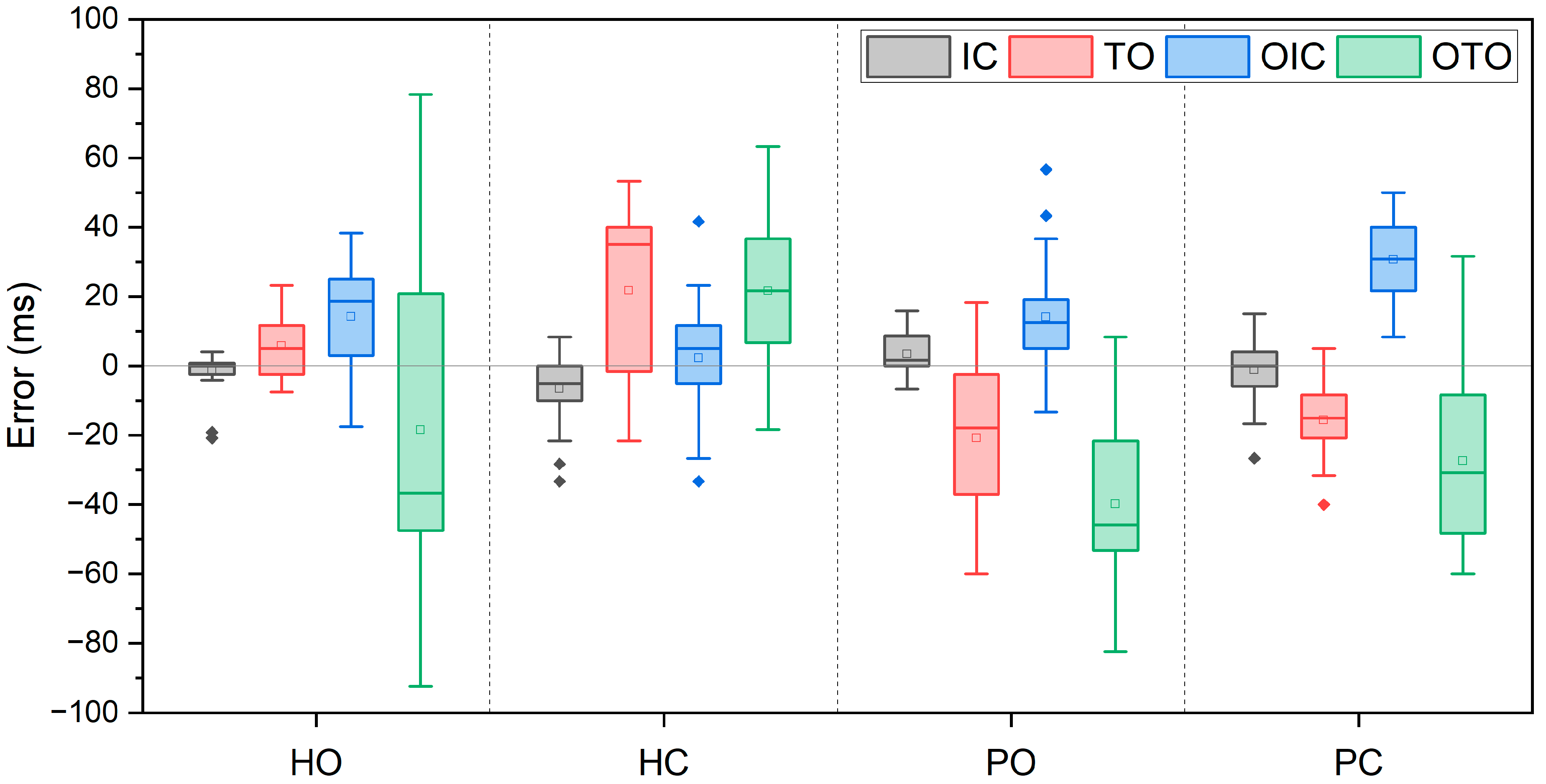
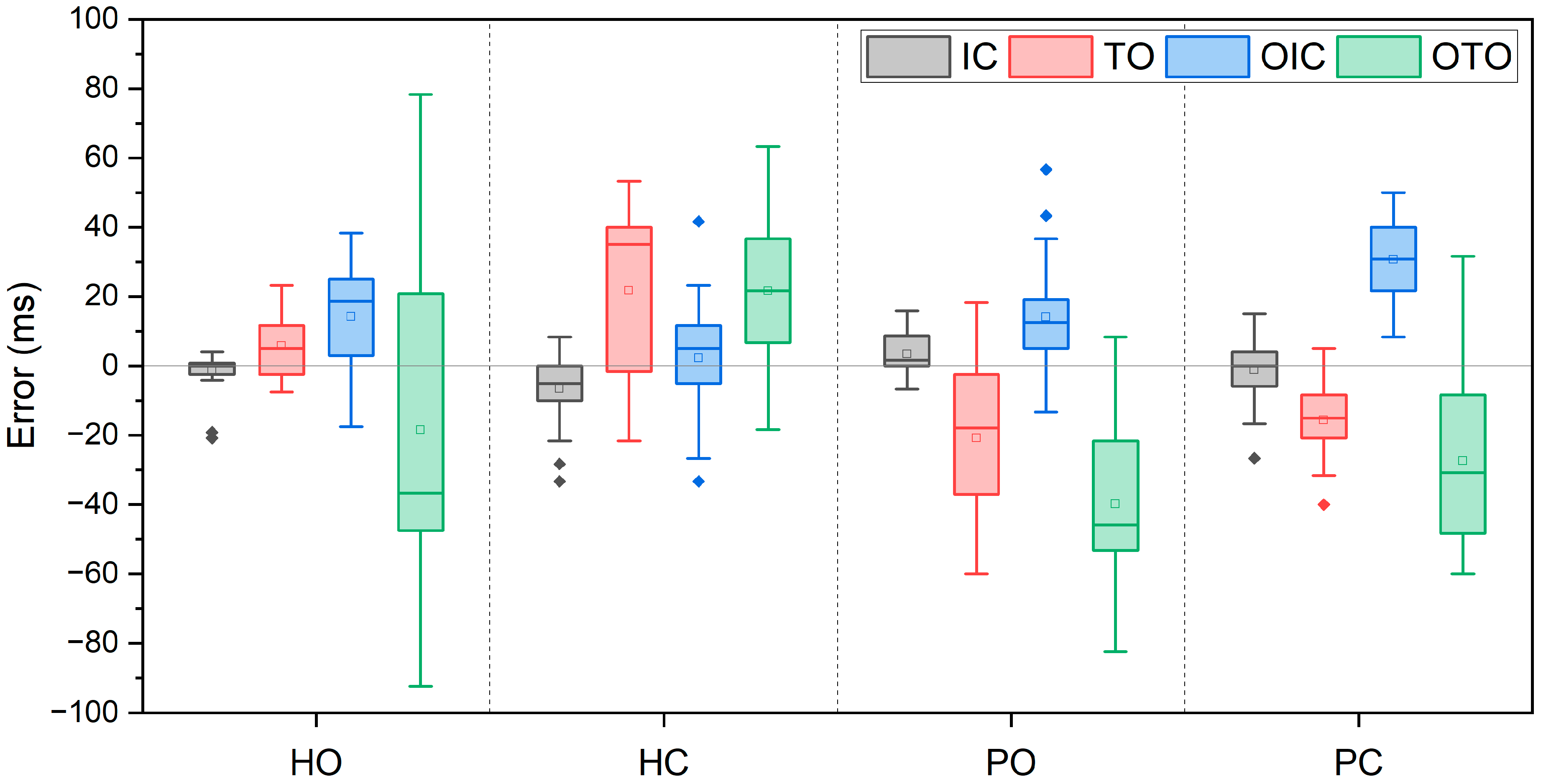
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Irby, S.E.; Kaufman, K.R.; Wirta, R.W.; Sutherland, D.H. Optimization and Application of a Wrap-Spring Clutch to a Dynamic Knee-Ankle-Foot Orthosis. IEEE Trans. Rehabil. Eng. 1999, 7, 130–134. [Google Scholar] [CrossRef]
- Hwang, S.; Kang, S.; Cho, K.; Kim, Y. Biomechanical Effect of Electromechanical Knee–Ankle–Foot-Orthosis on Knee Joint Control in Patients with Poliomyelitis. Med. Biol. Eng. Comput. 2008, 46, 541–549. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.; Kim, Y. Gait Improvement of polio Patients Using an Electromechanical KAFO. J. Korean Soc. Precis. Eng. 2003, 20, 36–42. [Google Scholar]
- Irby, S.E.; Bernhardt, K.A.; Kaufman, K.R. Gait of Stance Control Orthosis Users: The Dynamic Knee Brace System. Prosthet. Orthot. Int. 2005, 29, 269–282. [Google Scholar] [CrossRef] [PubMed]
- Zissimopoulos, A.; Fatone, S.; Gard, S.A. Biomechanical and Energetic Effects of a Stance-Control Orthotic Knee Joint. J. Rehabil. Res. Dev. 2007, 44, 503. [Google Scholar] [CrossRef]
- Rafiaei, M.; Bahramizadeh, M.; Arazpour, M.; Samadian, M.; Hutchins, S.W.; Farahmand, F.; Mardani, M.A. The Gait and Energy Efficiency of Stance Control Knee–Ankle–Foot Orthoses: A Literature Review. Prosthet. Orthot. Int. 2016, 40, 202–214. [Google Scholar] [CrossRef]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of Control Strategies for Lower-Limb Exoskeletons to Assist Gait. J. NeuroEng. Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef]
- Irby, S.E.; Kaufman, K.R.; Mathewson, J.W.; Sutherland, D.H. Automatic Control Design for a Dynamic Knee-Brace System. IEEE Trans. Rehabil. Eng. 1999, 7, 135–139. [Google Scholar] [CrossRef]
- De Miguel-Fernández, J.; Lobo-Prat, J.; Prinsen, E.; Font-Llagunes, J.M.; Marchal-Crespo, L. Control Strategies Used in Lower Limb Exoskeletons for Gait Rehabilitation after Brain Injury: A Systematic Review and Analysis of Clinical Effectiveness. J. NeuroEng. Rehabil. 2023, 20, 23. [Google Scholar] [CrossRef] [PubMed]
- Maqbool, H.F.; Husman, M.A.B.; Awad, M.I.; Abouhossein, A.; Iqbal, N.; Dehghani-Sanij, A.A. A Real-Time Gait Event Detection for Lower Limb Prosthesis Control and Evaluation. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1500–1509. [Google Scholar] [CrossRef] [PubMed]
- Willemsen, A.T.M.; Bloemhof, F.; Boom, H.B.K. Automatic Stance-Swing Phase Detection from Accelerometer Data for Peroneal Nerve Stimulation. IEEE Trans. Biomed. Eng. 1990, 37, 1201–1208. [Google Scholar] [CrossRef]
- Piriyakulkit, S.; Hirata, Y.; Ozawa, H. Real-Time Gait Event Recognition for Wearable Assistive Device Using an IMU on Thigh. In Proceedings of the 2017 IEEE International Conference on Cyborg and Bionic Systems (CBS), Beijing, China, 17–19 October 2017; pp. 314–318. [Google Scholar] [CrossRef]
- Vu, H.T.T.; Dong, D.; Cao, H.-L.; Verstraten, T.; Lefeber, D.; Vanderborght, B.; Geeroms, J. A Review of Gait Phase Detection Algorithms for Lower Limb Prostheses. Sensors 2020, 20, 3972. [Google Scholar] [CrossRef] [PubMed]
- Aftab, Z.; Ahmed, G.; Ali, A.; Gillani, N. Estimation of Gait Parameters for Transfemoral Amputees Using Lower Limb Kinematics and Deterministic Algorithms. Appl. Bionics Biomech. 2022, 2022, e2883026. [Google Scholar] [CrossRef] [PubMed]
- Carse, B.; Meadows, B.; Bowers, R.; Rowe, P. Affordable Clinical Gait Analysis: An Assessment of the Marker Tracking Accuracy of a New Low-Cost Optical 3D Motion Analysis System. Physiotherapy 2013, 99, 347–351. [Google Scholar] [CrossRef] [PubMed]
- Schlachetzki, J.C.M.; Barth, J.; Marxreiter, F.; Gossler, J.; Kohl, Z.; Reinfelder, S.; Gassner, H.; Aminian, K.; Eskofier, B.M.; Winkler, J.; et al. Wearable Sensors Objectively Measure Gait Parameters in Parkinson’s Disease. PLoS ONE 2017, 12, e0183989. [Google Scholar] [CrossRef]
- Ledoux, E.D. Inertial Sensing for Gait Event Detection and Transfemoral Prosthesis Control Strategy. IEEE Trans. Biomed. Eng. 2018, 65, 2704–2712. [Google Scholar] [CrossRef]
- Hebert, J.S. Ambulatory KAFOs: A Physiatry Perspective. JPO J. Prosthet. Orthot. 2006, 18, 169. [Google Scholar] [CrossRef]
- Andreoni, G.; Mazzola, M.; Perego, P.; Standoli, C.E.; Manzoni, S.; Piccini, L.; Molteni, F. Wearable Monitoring Devices for Assistive Technology: Case Studies in Post-Polio Syndrome. Sensors 2014, 14, 2012–2027. [Google Scholar] [CrossRef]
- Gurchiek, R.D.; Garabed, C.P.; McGinnis, R.S. Gait Event Detection Using a Thigh-Worn Accelerometer. Gait Posture 2020, 80, 214–216. [Google Scholar] [CrossRef]
- González, R.C.; López, A.M.; Rodriguez-Uría, J.; Álvarez, D.; Alvarez, J.C. Real-Time Gait Event Detection for Normal Subjects from Lower Trunk Accelerations. Gait Posture 2010, 31, 322–325. [Google Scholar] [CrossRef]
- McCamley, J.; Donati, M.; Grimpampi, E.; Mazzà, C. An Enhanced Estimate of Initial Contact and Final Contact Instants of Time Using Lower Trunk Inertial Sensor Data. Gait Posture 2012, 36, 316–318. [Google Scholar] [CrossRef] [PubMed]
- Garcia, F.A.; Pérez-Ibarra, J.C.; Terra, M.H.; Siqueira, A.A.G. Adaptive Algorithm for Gait Segmentation Using a Single IMU in the Thigh Pocket. IEEE Sens. J. 2022, 22, 13251–13261. [Google Scholar] [CrossRef]
- Lee, H.-K.; Hwang, S.-J.; Cho, S.-P.; Lee, D.-R.; You, S.-H.; Lee, K.-J.; Kim, Y.-H.; Choi, H.-S. Novel Algorithm for the Hemiplegic Gait Evaluation Using a Single 3-Axis Accelerometer. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 3964–3966. [Google Scholar]
- Ding, S.; Ouyang, X.; Liu, T.; Li, Z.; Yang, H. Gait Event Detection of a Lower Extremity Exoskeleton Robot by an Intelligent IMU. IEEE Sens. J. 2018, 18, 9728–9735. [Google Scholar] [CrossRef]
- Patterson, K.K.; Parafianowicz, I.; Danells, C.J.; Closson, V.; Verrier, M.C.; Staines, W.R.; Black, S.E.; McIlroy, W.E. Gait Asymmetry in Community-Ambulating Stroke Survivors. Arch. Phys. Med. Rehabil. 2008, 89, 304–310. [Google Scholar] [CrossRef] [PubMed]
- Viteckova, S.; Kutilek, P.; Svoboda, Z.; Krupicka, R.; Kauler, J.; Szabo, Z. Gait Symmetry Measures: A Review of Current and Prospective Methods. Biomed. Signal Process. Control 2018, 42, 89–100. [Google Scholar] [CrossRef]
- Tian, J. Adversarial Vulnerability of Deep Neural Network-Based Gait Event Detection: A Comparative Study Using Accelerometer-Based Data. Biomed. Signal Process. Control 2022, 73, 103429. [Google Scholar] [CrossRef]
- Lee, J.; Hong, W.; Hur, P. Continuous Gait Phase Estimation Using LSTM for Robotic Transfemoral Prosthesis Across Walking Speeds. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1470–1477. [Google Scholar] [CrossRef]
- Arshad, M.Z.; Jamsrandorj, A.; Kim, J.; Mun, K.-R. Gait Events Prediction Using Hybrid CNN-RNN-Based Deep Learning Models through a Single Waist-Worn Wearable Sensor. Sensors 2022, 22, 8226. [Google Scholar] [CrossRef]
- Farah, J.D.; Baddour, N.; Lemaire, E.D. Gait Phase Detection from Thigh Kinematics Using Machine Learning Techniques. In Proceedings of the 2017 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Rochester, MN, USA, 7–10 May 2017; pp. 263–268. [Google Scholar]
- Kim, Y.; Jung, H.; Koo, B.; Kim, J.; Kim, T.; Nam, Y. Detection of Pre-Impact Falls from Heights Using an Inertial Measurement Unit Sensor. Sensors 2020, 20, 5388. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Signal | Description |
|---|---|
| AccX | X-axis acceleration signal (AP direction) |
| AccZ | Z-axis acceleration signal (V direction) |
| AZbp | The signal filtered with a bandpass filter on AccZ (cutoff frequency = (main frequency of AccZ ± 0.5 Hz)) |
| GyroY | Angular velocity in the pitch direction |
| GYlp3 | The signal filtered with a bandpass filter on AccZ (cutoff frequency = 3 Hz) |
| Type of KAFO | Strides | |
|---|---|---|
| Healthy adults | One-way clutch | 20 |
| Pneumatic cylinder | 15 | |
| Patient | One-way clutch | 22 |
| Pneumatic cylinder | 12 |
| Acceleration | Main Frequency (Hz) | |
|---|---|---|
| Patient | Healthy Adults | |
| AccX | 1.4 ± 0.1 | 1.6 ± 0.1 |
| AccY | 0.7 ± 0.1 | 0.8 ± 0.1 |
| AccZ | 1.4 ± 0.1 | 1.6 ± 0.1 |
| Error Rate (%GC) | IC | TO | OIC | OTO |
|---|---|---|---|---|
| HO | −0.1 ± 0.5 | 0.5 ± 0.7 | 1.1 ± 1.3 | −1.3 ± 3.9 |
| HC | −0.5 ± 0.8 | 1.8 ± 2.0 | 0.2 ± 1.3 | 1.8 ± 1.9 |
| PO | 0.2 ± 0.4 | −1.5 ± 1.5 | 1.0 ± 1.0 | −2.8 ± 1.5 |
| PC | −0.1 ± 0.6 | −1.2 ± 0.8 | 2.1 ± 0.8 | −2.5 ± 1.4 |
| Mean ± SD (%) | Stance | Symmetry | Single Limb Support | Double Limb Support | |
|---|---|---|---|---|---|
| HO | Measured | 62.0 ± 1.5 | 48.2 ± 1.4 | 33.3 ± 1.6 | 14.1 ± 1.1 |
| Calculated | 62.8 ± 1.3 | 49.6 ± 1.3 | 37.1 ± 3.9 | 12.5 ± 1.4 | |
| Error | 0.7 ± 0.8 | 1.3 ± 1.4 | 3.8 ± 3.4 | −1.2 ± 2.1 | |
| HC | Measured | 62.2 ± 1.3 | 48.9 ± 1.4 | 34.5 ± 1.2 | 13.4 ± 1.2 |
| Calculated | 64.9 ± 1.1 | 49.9 ± 1.4 | 33.6 ± 1.9 | 15.4 ± 1.7 | |
| Error | 2.7 ± 1.6 | 1.0 ± 1.5 | −0.9 ± 2.1 | 1.9 ± 1.9 | |
| PO | Measured | 63.0 ± 2.4 | 49.2 ± 2.7 | 34.2 ± 2.3 | 14.9 ± 1.4 |
| Calculated | 61.6 ± 3.2 | 50.0 ± 3.3 | 37.7 ± 3.4 | 12.3 ± 1.6 | |
| Error | −1.3 ± 1.1 | 0.9 ± 1.0 | 3.5 ± 2.4 | −2.5 ± 1.6 | |
| PC | Measured | 62.3 ± 1.1 | 47.3 ± 1.1 | 33.1 ± 0.9 | 15.1 ± 0.9 |
| Calculated | 61.4 ± 1.0 | 49.7 ± 1.4 | 38.1 ± 1.7 | 12.3 ± 0.7 | |
| Error | −0.9 ± 0.6 | 2.5 ± 0.8 | 5.0 ± 1.5 | −2.7 ± 1.2 | |
| Feature Signal | This Study | McCamley et al. [22] | Ledoux [17] | Gurchiek et al. [20] | Ding et al. [25] | Gracia et al. [23] |
|---|---|---|---|---|---|---|
| Subjects | 2 healthy, 1 hemiplegic | 18 healthy | 10 healthy, 5 TFAs * | 32 healthy | 10 healthy | 9 healthy |
| Sensor (position) | IMU (thigh) | IMU (COM) | IMU (shank) | IMU (thigh) | IMU (foot) | IMU (thigh) |
| Detected events | IC, TO, OIC, OTO | IC, TO | IC, TO | IC, TO | IC, TO, FF, HO | IC, TO, FF, HO |
| Method | Threshold (Acc, Gyro) | Threshold (Acc) | Threshold (Gyro) | Threshold (Acc) | Threshold (Acc, Gyro) | Hidden Markov Model |
| Performance (error rate, %) | IC: −0.1 ± 0.6 TO: −0.2 ± 1.9 OIC: 1.0 ± 1.3 OTO: −1.1 ± 2.9 | IC: 2 TO: 3 | IC: −1.7 ± 0.6 TO: −1.8 ± 0.6 | – | – | – |
| Performance (error, ms) | IC: −1 ± 8 TO: −3 ± 24 OIC: 15 ± 17 OTO: −18 ± 38 | IC: −6 ± 24 TO: −29 ± 26 | – | IC: 39 ± 28 TO: 28 ± 28 | IC: -10 TO: 21 FF: 19 HO: 40 | IC: 36.7 TO: 6.7 FF: 23.3 HO: −6.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Koo, B.; Lee, S.; Jang, D.-J.; Shin, H.; Choi, H.-J.; Kim, Y. Determination of Gait Events and Temporal Gait Parameters for Persons with a Knee–Ankle–Foot Orthosis. Sensors 2024, 24, 964. https://doi.org/10.3390/s24030964
Yang S, Koo B, Lee S, Jang D-J, Shin H, Choi H-J, Kim Y. Determination of Gait Events and Temporal Gait Parameters for Persons with a Knee–Ankle–Foot Orthosis. Sensors. 2024; 24(3):964. https://doi.org/10.3390/s24030964
Chicago/Turabian StyleYang, Sumin, Bummo Koo, Seunghee Lee, Dae-Jin Jang, Hyunjun Shin, Hyuk-Jae Choi, and Youngho Kim. 2024. "Determination of Gait Events and Temporal Gait Parameters for Persons with a Knee–Ankle–Foot Orthosis" Sensors 24, no. 3: 964. https://doi.org/10.3390/s24030964
APA StyleYang, S., Koo, B., Lee, S., Jang, D.-J., Shin, H., Choi, H.-J., & Kim, Y. (2024). Determination of Gait Events and Temporal Gait Parameters for Persons with a Knee–Ankle–Foot Orthosis. Sensors, 24(3), 964. https://doi.org/10.3390/s24030964