



Enhanced Noise-Resilient Pressure Mat System Based on Hyperdimensional Computing

 ,
, 

Abstract
1. Introduction
- We designed a low-cost pressure sensing mat with 512 sensing areas using Velostat material [29] for indoor activity recognition.
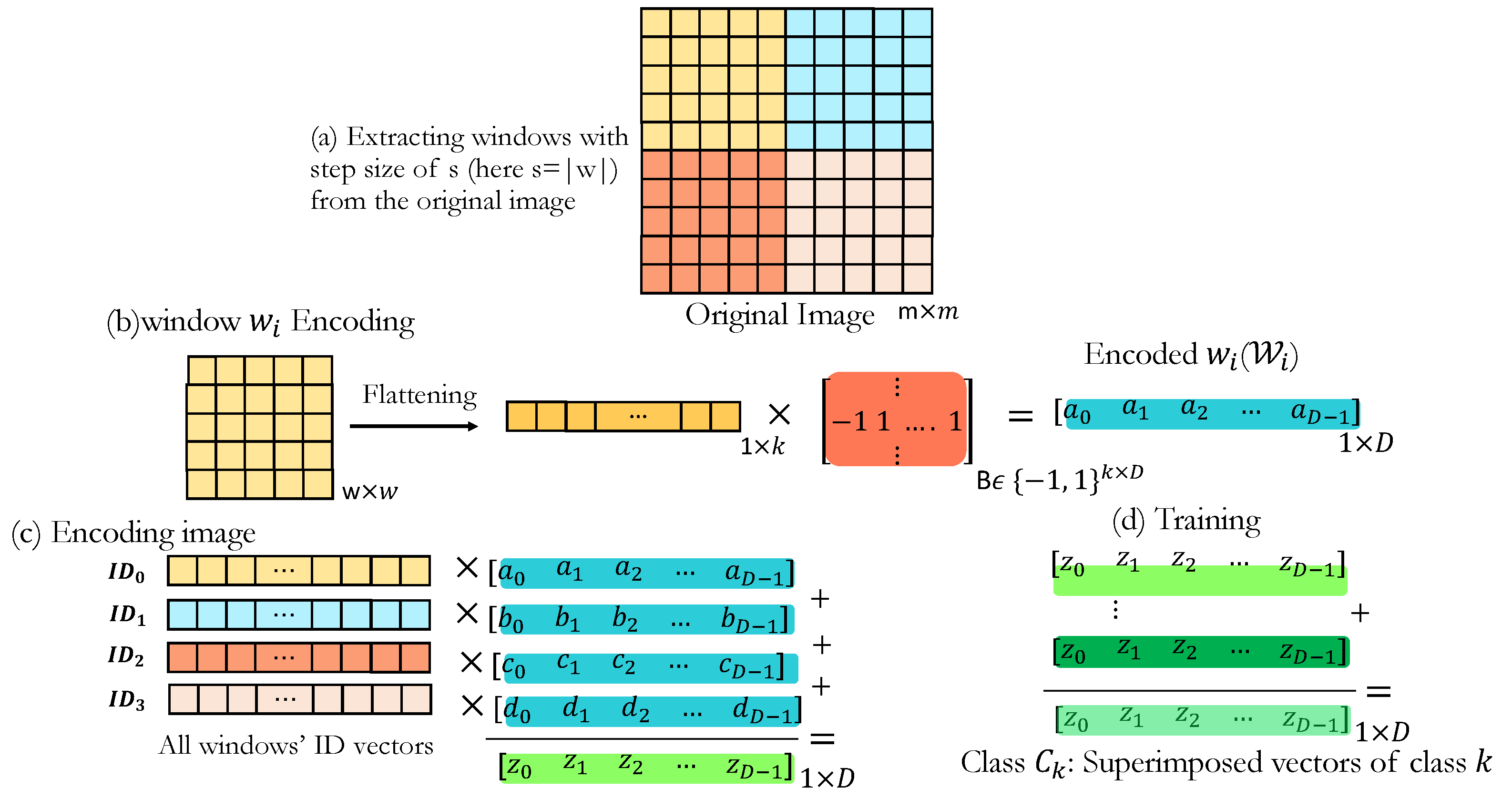
- To address the computational constraints of such a small mobile system, we developed a novel lightweight online learning algorithm based on noise-resilient HDC. To the best of our knowledge, this paper represents the first application of an HDC-based method for the analysis of pressure mat data. We enhance traditional HDC performance with a novel encoding method to account for different noise sources, all while ensuring comparable time and computation costs by operating in significantly lower dimensions (vector lengths).
- To evaluate the performance of our system, we collected two datasets, capturing the static and continuous nature of human movements. Our study includes three static and four continuous activities. Our system matches CNN’s accuracy for static activities and outperforms it by 9.47% for continuous activities with an accuracy of 93.19%, while consuming 85% less energy. This is achieved with compact 200-dimensional vectors, compared to the more memory-intensive HDC baseline (2k–10k vector dimensions).
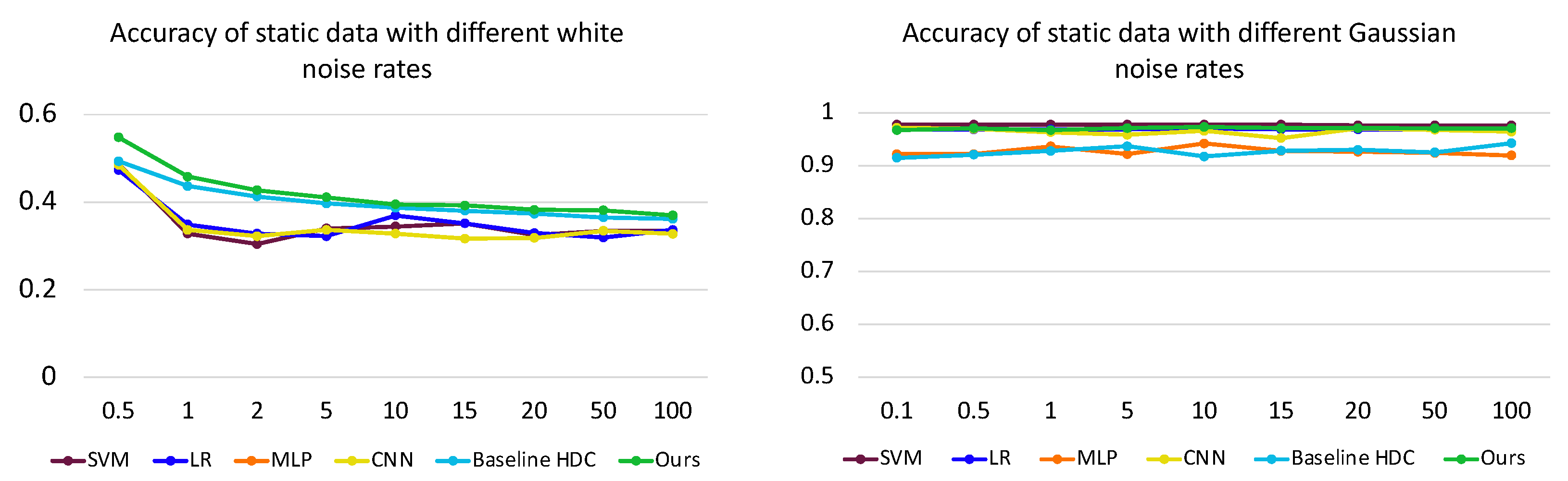
- Our method effectively preserves complex data patterns without requiring complicated feature extraction, operating directly on raw data. Extensive experiments, including noise injections, demonstrate its superiority in smart home activity recognition over state-of-the-art algorithms. Our approach excels in mitigating noise challenges, achieving an average improvement of 13.19% (8.77%) for continuous (static) data with Gaussian noise compared to the current state-of-the-art method.
2. Related Work
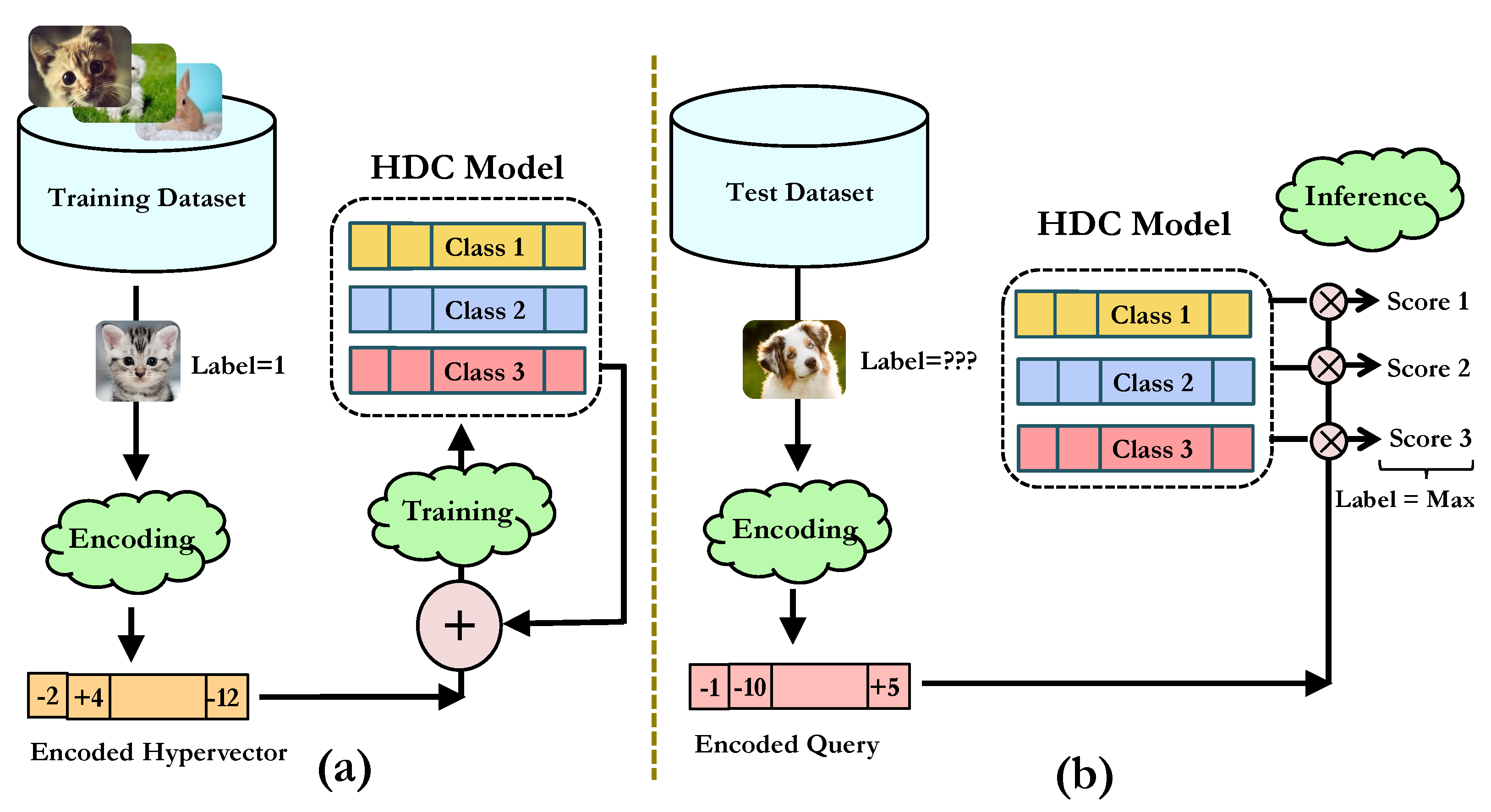
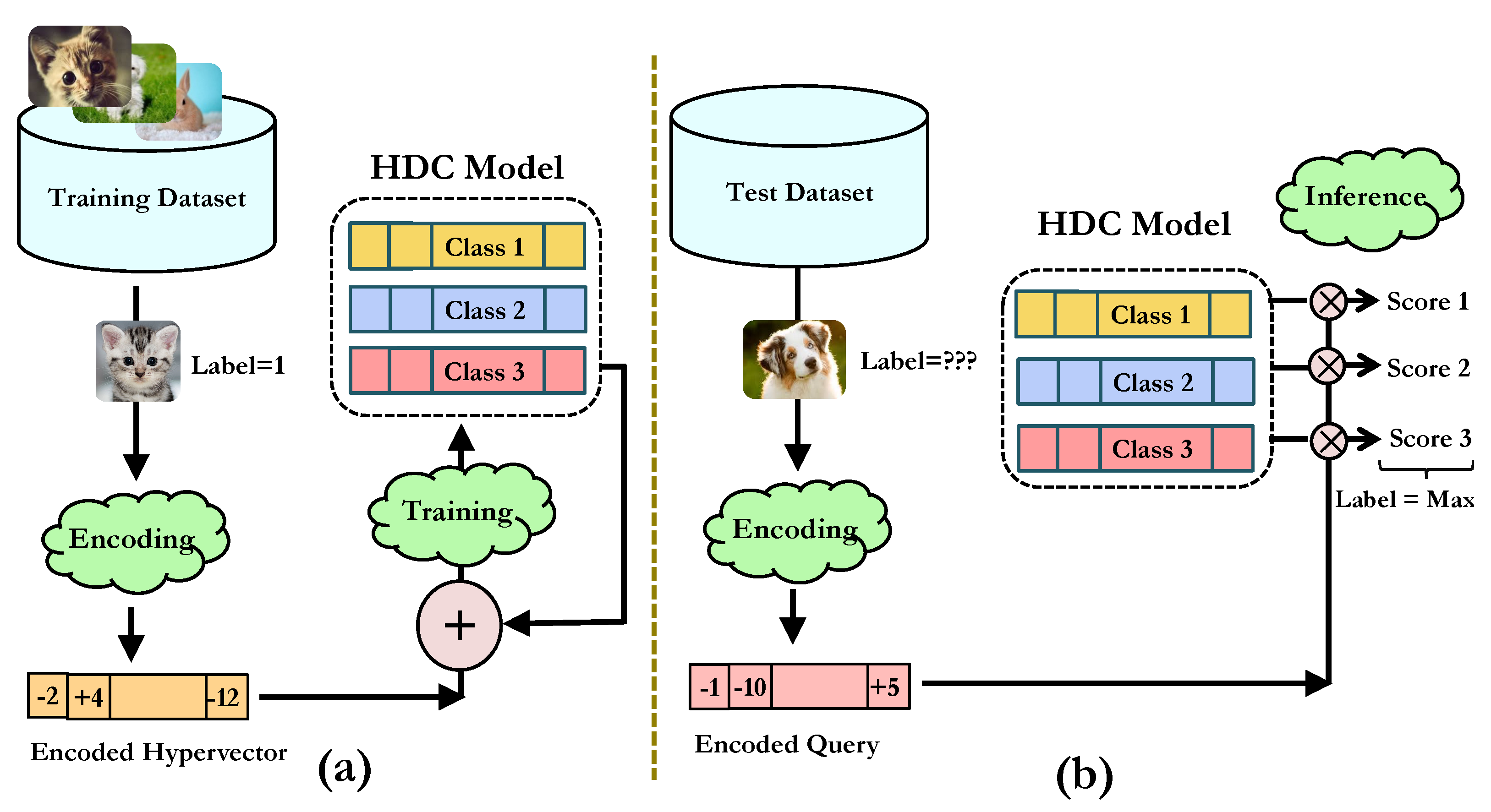
3. Hyperdimensional Computing
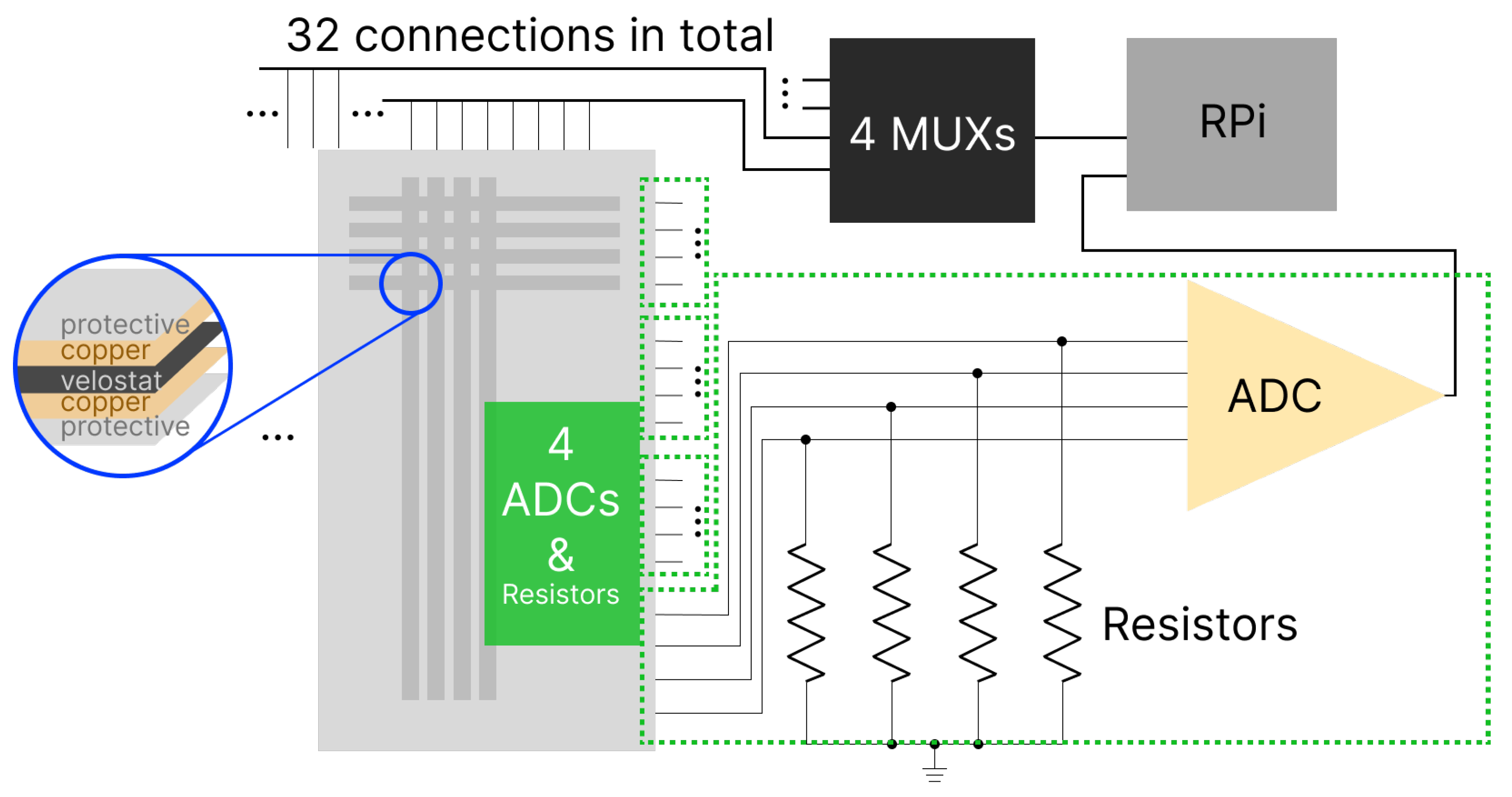
Hardware Design: Sensor Mat Design for Smart Home Pressure Sensing
4. Noise-Resilient HDC-Based Pressure Mat Design
4.1. Software Design: HDC-Based Classifier
5. Experiments and Results
5.1. Experimental Setup
5.2. Accuracy, Execution Time, and Energy Consumption with No Noise
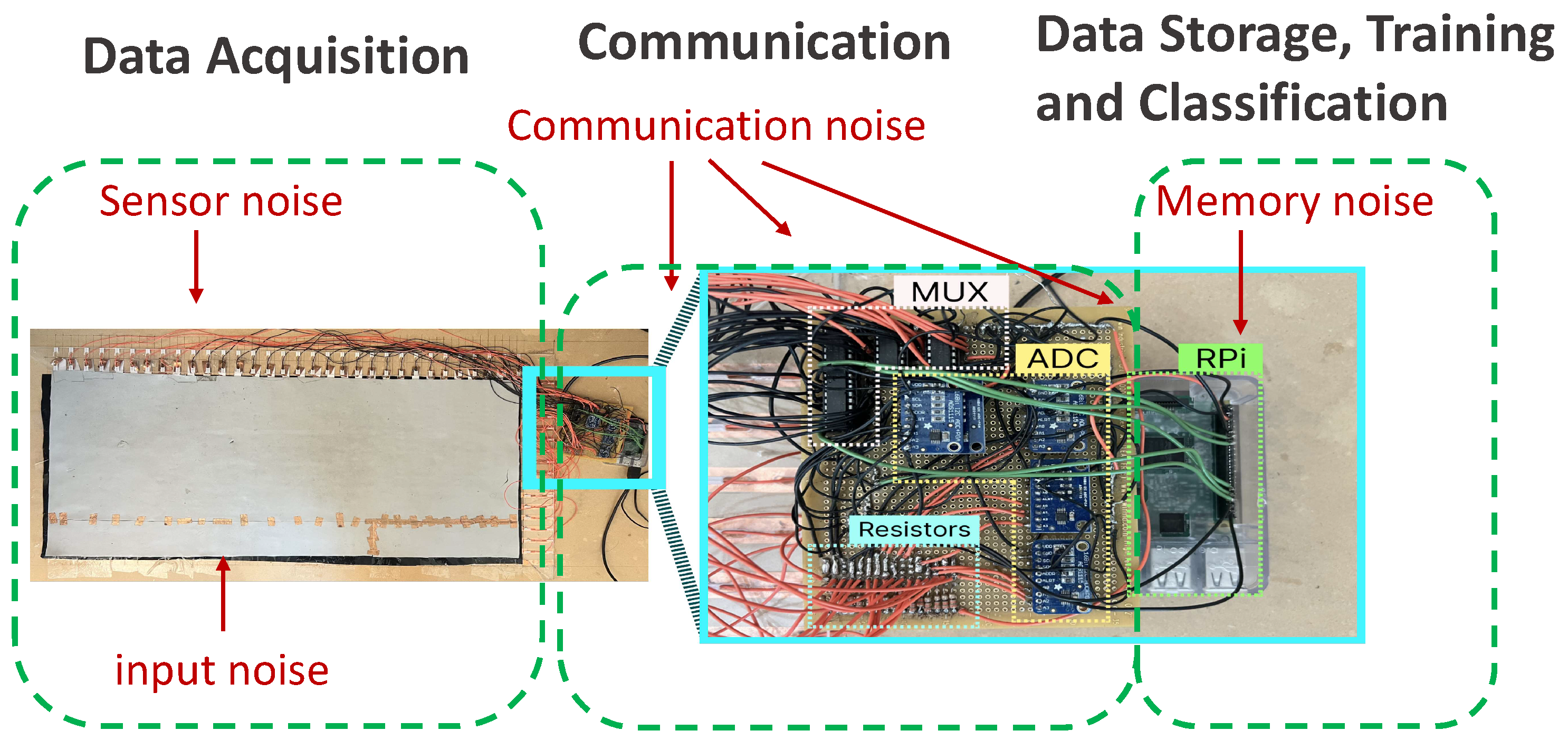
5.3. Accuracy with Noise
5.3.1. Input Noise
5.3.2. Sensor Noise
5.3.3. Memory and Communication Noise
5.4. Discussion and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stojkoska, B.L.R.; Trivodaliev, K.V. A review of Internet of Things for smart home: Challenges and solutions. J. Clean. Prod. 2017, 140, 1454–1464. [Google Scholar] [CrossRef]
- Marikyan, D.; Papagiannidis, S.; Alamanos, E. A systematic review of the smart home literature: A user perspective. Technol. Forecast. Soc. Chang. 2019, 138, 139–154. [Google Scholar] [CrossRef]
- Kang, B.; Kim, S.; Choi, M.I.; Cho, K.; Jang, S.; Park, S. Analysis of types and importance of sensors in smart home services. In Proceedings of the 2016 IEEE 18th International Conference on High Performance Computing and Communications; IEEE 14th International Conference on Smart City; IEEE 2nd International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Sydney, NSW, Australia, 12–14 December 2016; pp. 1388–1389. [Google Scholar]
- Sovacool, B.K.; Del Rio, D.D.F. Smart home technologies in Europe: A critical review of concepts, benefits, risks and policies. Renew. Sustain. Energy Rev. 2020, 120, 109663. [Google Scholar] [CrossRef]
- Arcelus, A.; Jones, M.H.; Goubran, R.; Knoefel, F. Integration of smart home technologies in a health monitoring system for the elderly. In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW’07), Niagara Falls, ON, Canada, 21–23 May 2007; Volume 2, pp. 820–825. [Google Scholar]
- Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure mapping mat for tele-home care applications. Sensors 2016, 16, 365. [Google Scholar] [CrossRef] [PubMed]
- Tang, K.; Kumar, A.; Nadeem, M.; Maaz, I. CNN-based smart sleep posture recognition system. IoT 2021, 2, 119–139. [Google Scholar] [CrossRef]
- Ault, L.; Goubran, R.; Wallace, B.; Lowden, H.; Knoefel, F. Smart home technology solution for night-time wandering in persons with dementia. J. Rehabil. Assist. Technol. Eng. 2020, 7, 2055668320938591. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Kim, I.; Kim, J. Designing the smart foot mat and its applications: As a user identification sensor for smart home scenarios. Adv. Sci. Technol. Lett. 2015, 87, 1–5. [Google Scholar]
- Meyer, J.; Arnrich, B.; Schumm, J.; Troster, G. Design and modeling of a textile pressure sensor for sitting posture classification. IEEE Sensors J. 2010, 10, 1391–1398. [Google Scholar] [CrossRef]
- Cheng, J.; Sundholm, M.; Zhou, B.; Kreil, M.; Lukowicz, P. Recognizing subtle user activities and person identity with cheap resistive pressure sensing carpet. In Proceedings of the 2014 International Conference on Intelligent Environments, Shanghai, China, 30 June–4 July 2014; pp. 148–153. [Google Scholar]
- Middleton, L.; Buss, A.A.; Bazin, A.; Nixon, M.S. A floor sensor system for gait recognition. In Proceedings of the Fourth IEEE Workshop on Automatic Identification Advanced Technologies (AutoID’05), Buffalo, NY, USA, 17–18 October 2005; pp. 171–176. [Google Scholar]
- Sundholm, M.; Cheng, J.; Zhou, B.; Sethi, A.; Lukowicz, P. Smart-mat: Recognizing and counting gym exercises with low-cost resistive pressure sensing matrix. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 373–382. [Google Scholar]
- Qian, G.; Zhang, J.; Kidane, A. People identification using floor pressure sensing and analysis. IEEE Sensors J. 2010, 10, 1447–1460. [Google Scholar] [CrossRef]
- Zakaria, N.K.; Tahir, N.M.; Jailani, R. Experimental Approach in Gait Analysis and Classification Methods for Autism pectrum Disorder: A Review. Int. J. Adv. Trends Comput. Sci. Eng. 2020, 9, 3995–4005. [Google Scholar] [CrossRef]
- Mehta, A.; Vaddadi, S.K.; Sharma, V.; Kala, P. A Phase-wise Analysis of Machine Learning based Human Activity Recognition using Inertial Sensors. In Proceedings of the 2020 IEEE 17th India Council International Conference (INDICON), New Delhi, India, 10–13 December 2020; pp. 1–7. [Google Scholar]
- Chen, P.J.; Hu, T.H.; Wang, M.S. Raspberry Pi-based sleep posture recognition system using AIoT technique. Healthcare 2022, 10, 513. [Google Scholar] [CrossRef] [PubMed]
- Stern, L.; Roshan Fekr, A. In-Bed Posture Classification Using Deep Neural Network. Sensors 2023, 23, 2430. [Google Scholar] [CrossRef] [PubMed]
- Clever, H.M.; Erickson, Z.; Kapusta, A.; Turk, G.; Liu, K.; Kemp, C.C. Bodies at rest: 3d human pose and shape estimation from a pressure image using synthetic data. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 6215–6224. [Google Scholar]
- USP-901 9 “× 15” Indoor/Outdoor Pressure Mat. Available online: https://www.unitedsecurity.com/copy-of-hold-up-buttons (accessed on 1 December 2023).
- Tekscan MobileMat. Available online: https://www.tekscan.com/products-solutions/systems/mobilemat (accessed on 1 December 2023).
- Morris, J.; Ergun, K.; Khaleghi, B.; Imani, M.; Aksanli, B.; Simunic, T. HyDREA: Utilizing Hyperdimensional Computing for a More Robust and Efficient Machine Learning System. Acm Trans. Embed. Comput. Syst. 2022, 21, 78. [Google Scholar] [CrossRef]
- Chandrasekaran, R.; Ergun, K.; Lee, J.; Nanjunda, D.; Kang, J.; Rosing, T. Fhdnn: Communication efficient and robust federated learning for aiot networks. In Proceedings of the 59th ACM/IEEE Design Automation Conference, San Francisco, CA, USA, 10–14 July 2022; pp. 37–42. [Google Scholar]
- Kanerva, P. Hyperdimensional computing: An introduction to computing in distributed representation with high-dimensional random vectors. Cogn. Comput. 2009, 1, 139–159. [Google Scholar] [CrossRef]
- Thomas, A.; Dasgupta, S.; Rosing, T. A theoretical perspective on hyperdimensional computing. J. Artif. Intell. Res. 2021, 72, 215–249. [Google Scholar] [CrossRef]
- Heddes, M.; Nunes, I.; Givargis, T.; Nicolau, A.; Veidenbaum, A. Hyperdimensional hashing: A robust and efficient dynamic hash table. In Proceedings of the 59th ACM/IEEE Design Automation Conference, San Francisco, CA, USA, 10–14 July 2022; pp. 907–912. [Google Scholar]
- Zhao, Q.; Yu, X.; Rosing, T. Attentive Multimodal Learning on Sensor Data using Hyperdimensional Computing. In Proceedings of the 22nd International Conference on Information Processing in Sensor Networks, San Antonio, TX, USA, 9–12 May 2023; pp. 312–313. [Google Scholar]
- Khaleghi, B.; Xu, H.; Morris, J.; Rosing, T.Š. tiny-hd: Ultra-efficient hyperdimensional computing engine for iot applications. In Proceedings of the 2021 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 1–5 February 2021; pp. 408–413. [Google Scholar]
- Desco Industries. Velostat. 2015. Available online: https://en.wikipedia.org/wiki/Velostat (accessed on 1 December 2023).
- Yuan, L.; Wei, Y.; Li, J. Smart Pressure e-Mat for Human Sleeping Posture and Dynamic Activity Recognition. arXiv 2023, arXiv:2305.11367. [Google Scholar]
- Cáceres, J. ADS1115 Digital Filter Characterization. Available online: https://gibic.ing.unlp.edu.ar/wp-content/uploads/2022/04/ADS1115-Digital-Filter-Characterization.pdf (accessed on 1 December 2023).
- High-Speed, Low-Voltage, CMOS Analog Multiplexers/Switches. Datasheet. 2022. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/max4617-max4619.pdf (accessed on 1 December 2023).
- ADS111x Ultra-Small, Low-Power, I2C-Compatible, 860-SPS, 16-Bit ADCs with Internal Reference, Oscillator, and Programmable Comparator. Datasheet. 2018. Available online: https://www.ti.com/lit/ds/symlink/ads1114.pdf (accessed on 20 April 2023).
- Martinez-Cesteros, J.; Medrano-Sanchez, C.; Plaza-Garcia, I.; Igual-Catalan, R.; Albiol-Pérez, S. A velostat-based pressure-sensitive mat for center-of-pressure measurements: A preliminary study. Int. J. Environ. Res. Public Health 2021, 18, 5958. [Google Scholar] [CrossRef]
- Kang, J.; Zhou, M.; Bhansali, A.; Xu, W.; Thomas, A.; Rosing, T. RelHD: A Graph-based Learning on FeFET with Hyperdimensional Computing. In Proceedings of the 2022 IEEE 40th International Conference on Computer Design (ICCD), Olympic Valley, CA, USA, 23–26 October 2022; pp. 553–560. [Google Scholar]
- Heddes, M.; Nunes, I.; Vergés, P.; Desai, D.; Givargis, T.; Nicolau, A. Torchhd: An open-source python library to support hyperdimensional computing research. arXiv 2022, arXiv:2205.09208. [Google Scholar]
- Wang, D.; Ren, D.; Li, K.; Feng, Y.; Ma, D.; Yan, X.; Wang, G. Epileptic seizure detection in long-term EEG recordings by using wavelet-based directed transfer function. IEEE Trans. Biomed. Eng. 2018, 65, 2591–2599. [Google Scholar] [CrossRef]
- Qi, P.; Gong, S.; Jiang, N.; Dai, Y.; Yang, J.; Jiang, L.; Tong, J. Mattress-Based Non-Influencing Sleep Apnea Monitoring System. Sensors 2023, 23, 3675. [Google Scholar] [CrossRef]
- CanaKit. Raspberry Pi. Available online: https://www.canakit.com/raspberry-pi-4.html?cid=usd&src=raspberrypi (accessed on 1 December 2023).
- HIOKI. ACDC POWER HiTESTER 3334. Available online: https://www.hioki.com/global/products/power-meters/single-phase-ac-dc/id_6045 (accessed on 1 December 2023).
- Razak, A.H.A.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, H.F.; Chindapol, A.; Ritcey, J.A.; Hwang, J.N. Adaptive FEC scheme for layered multimedia streaming over wired/wireless channels. In Proceedings of the 2005 IEEE 7th Workshop on Multimedia Signal Processing, Shanghai, China, 30 October–2 November 2005; pp. 1–4. [Google Scholar]
- Dabora, R.; Abakasanga, E. On the Capacity of Communication Channels with Memory and Sampled Additive Cyclostationary Gaussian Noise. IEEE Trans. Inf. Theory 2023, 69, 6137–6166. [Google Scholar] [CrossRef]
- Xu, H.; Wu, J.; Pan, Q.; Liu, X.; Verikoukis, C. Digital Twin and Meta RL Empowered Fast-Adaptation of Joint User Scheduling and Task Offloading for Mobile Industrial IoT. IEEE J. Sel. Areas Commun. 2023, 41, 3254–3266. [Google Scholar] [CrossRef]
- Fu, X.; Liu, K.; Gao, X. Multi-UAVs communication-aware cooperative target tracking. Appl. Sci. 2018, 8, 870. [Google Scholar] [CrossRef]
- Aygun, S.; Moghadam, M.S.; Najafi, M.H.; Imani, M. Learning from Hypervectors: A Survey on Hypervector Encoding. arXiv 2023, arXiv:2308.00685. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | System | Comparison |
|---|---|---|
| Tang et al. [7] | CNN-based posture recognition | Data and computing intensive, prone to noise |
| Chen et al. [17] | Raspberry Pi 4 and Random Forest | Data and computing intensive, prone to noise |
| Clever et al. [19] | Synthetic dataset (PressurePose) | Computing and energy intensive |
| Our Work | Novel HDC-based encoding design | Outperforms in noise resilience, time and energy efficient |
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| d | Dimension of the original data | B | Base matrix |
| D | Dimension of encoded data | Hypervector of encoded data | |
| w | Window size | Encoded window | |
| s | Window overlapping step | C | Class hypervector |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asgarinejad, F.; Yu, X.; Jiang, D.; Morris, J.; Rosing, T.; Aksanli, B. Enhanced Noise-Resilient Pressure Mat System Based on Hyperdimensional Computing. Sensors 2024, 24, 1014. https://doi.org/10.3390/s24031014
Asgarinejad F, Yu X, Jiang D, Morris J, Rosing T, Aksanli B. Enhanced Noise-Resilient Pressure Mat System Based on Hyperdimensional Computing. Sensors. 2024; 24(3):1014. https://doi.org/10.3390/s24031014
Chicago/Turabian StyleAsgarinejad, Fatemeh, Xiaofan Yu, Danlin Jiang, Justin Morris, Tajana Rosing, and Baris Aksanli. 2024. "Enhanced Noise-Resilient Pressure Mat System Based on Hyperdimensional Computing" Sensors 24, no. 3: 1014. https://doi.org/10.3390/s24031014
APA StyleAsgarinejad, F., Yu, X., Jiang, D., Morris, J., Rosing, T., & Aksanli, B. (2024). Enhanced Noise-Resilient Pressure Mat System Based on Hyperdimensional Computing. Sensors, 24(3), 1014. https://doi.org/10.3390/s24031014