
Review on Portable-Powered Lower Limb Exoskeletons


Abstract
1. Introduction
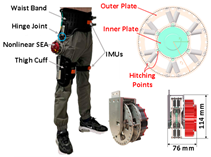
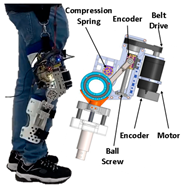
2. Mechanism Design
2.1. Rigid PPLLEs
2.2. Flexible PPLLEs
2.2.1. SEA
2.2.2. Variable Stiffness
2.2.3. Cable
2.3. Soft Exosuit PPLLEs
2.3.1. Portable Lower Limb-Powered Exoskeleton-Cable Exosuits (PPLLEC-EXOSUITs)
2.3.2. Portable Lower Limb-Powered Exoskeleton-Pneumatic Exosuits (PPLLEP-EXOSUITs)
2.3.3. Other PPLLEs
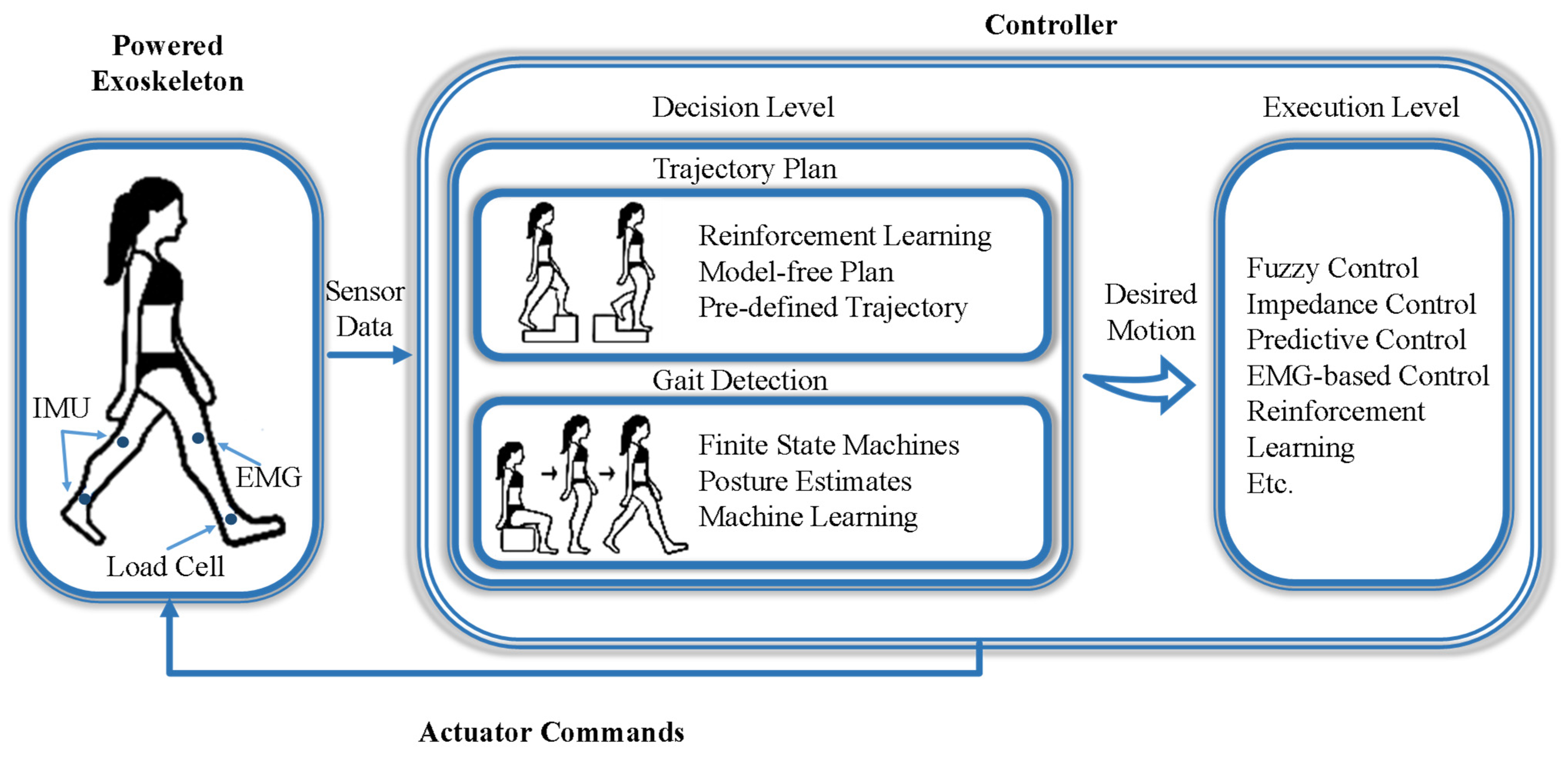
3. Control Strategy
3.1. Decision Level
3.1.1. Gait Detection
3.1.2. Trajectory Plan
3.2. Execution Level
3.2.1. Impedance Control
3.2.2. Predictive Control
3.2.3. EMG-Based Control
3.2.4. Fuzzy Control
3.2.5. Reinforcement Learning/Deep Reinforcement Learning Control
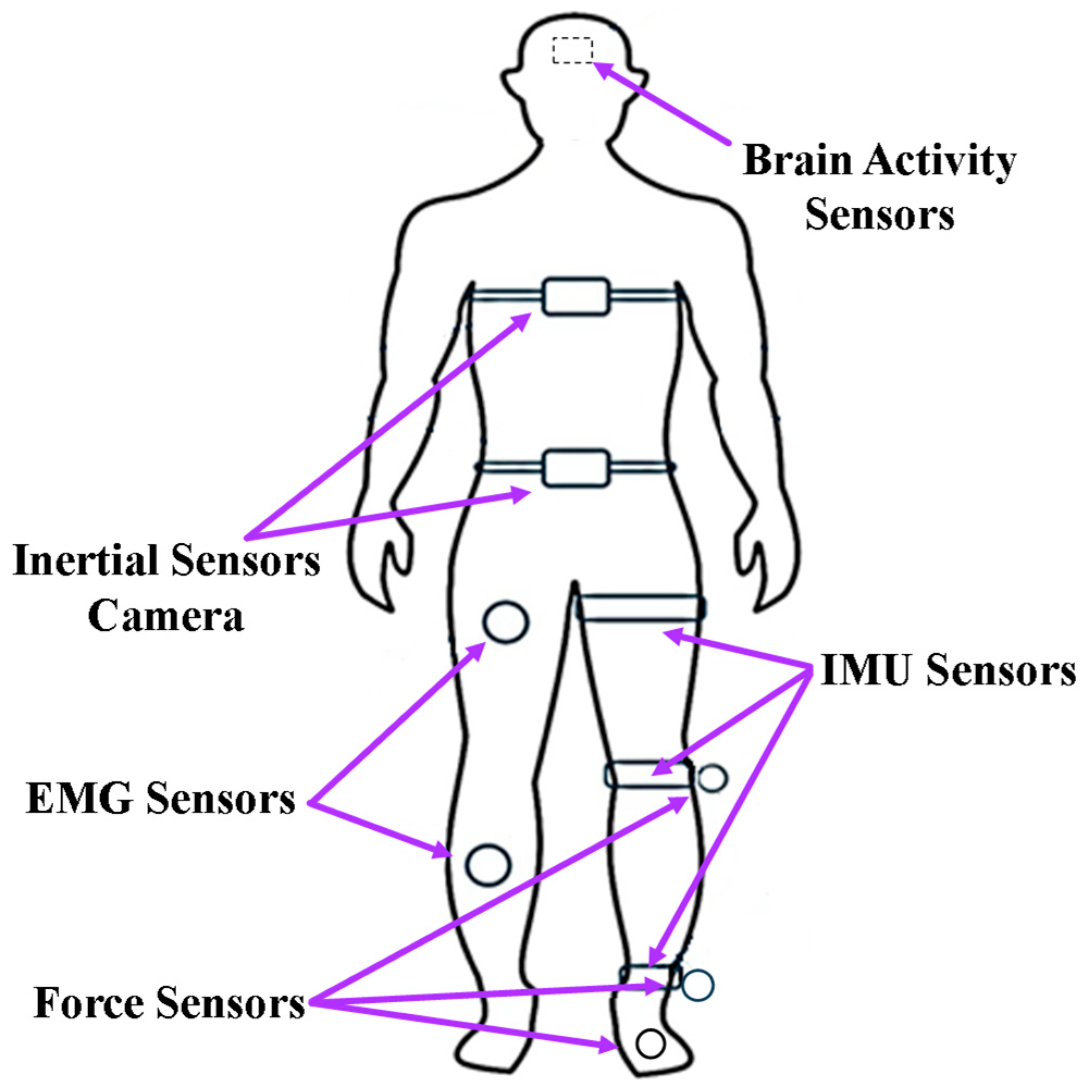
4. Sensors
4.1. Kinematic Sensors
4.2. Kinetics Sensors
4.3. Muscle Activity Sensors
4.4. Brain Activity Sensors
4.5. Computer Vision and Range Sensors
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Guizzo, E.; Goldstein, H. The rise of the body bots [robotic exoskeletons]. IEEE Spectr. 2005, 42, 50–56. [Google Scholar] [CrossRef]
- Kazerooni, H.; Steger, R. The Berkeley Lower Extremity Exoskeleton. J. Dyn. Syst. Meas. Control 2006, 128, 14–25. [Google Scholar] [CrossRef]
- Strausser, K.A.; Kazerooni, H. The development and testing of a human machine interface for a mobile medical exoskeleton. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar] [CrossRef]
- Sanz-Merodio, D.; Cestari, M.; Arevalo, J.C.; Carrillo, X.A.; Garcia, E. Generation and control of adaptive gaits in lower-limb exoskeletons for motion assistance. Adv. Robot. 2014, 28, 329–338. [Google Scholar] [CrossRef]
- Esquenazi, A.; Talaty, M.; Packel, A.; Saulino, M. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am. J. Phys. Med. Rehabil. 2012, 91, 911–921. [Google Scholar] [CrossRef]
- Pardoel, S.; Doumit, M. Development and testing of a passive ankle exoskeleton. Biocybern. Biomed. Eng. 2019, 39, 902–913. [Google Scholar] [CrossRef]
- Sarajchi, M.; Al-Hares, M.K.; Sirlantzis, K. Wearable Lower-Limb Exoskeleton for Children with Cerebral Palsy: A Systematic Review of Mechanical Design, Actuation Type, Control Strategy, and Clinical Evaluation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2695–2720. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, B.; Liu, C.; Liu, T.; Han, Y.; Wang, S.; Ferreira, J.P.; Dong, W.; Zhang, X. A Review on the Rehabilitation Exoskeletons for the Lower Limbs of the Elderly and the Disabled. Electronics 2022, 11, 388. [Google Scholar] [CrossRef]
- Kapsalyamov, A.; Jamwal, P.K.; Hussain, S.; Ghayesh, M.H. State of the Art Lower Limb Robotic Exoskeletons for Elderly Assistance. IEEE Access 2019, 7, 95075–95086. [Google Scholar] [CrossRef]
- Sun, M.W.; Ouyang, X.P.; Mattila, J.; Yang, H.Y.; Hou, G. One Novel Hydraulic Actuating System for the Lower-Body Exoskeleton. Chin. J. Mech. Eng-En. 2021, 34, 31. [Google Scholar] [CrossRef]
- Sun, M.W.; Ouyang, X.P.; Mattila, J.; Chen, Z.Y.; Yang, H.Y.; Liu, H. Lightweight Electrohydrostatic Actuator Drive Solution for Exoskeleton Robots. IEEE/ASME Trans. Mechatron. 2022, 27, 4631–4642. [Google Scholar] [CrossRef]
- Rituraj, R.; Scheidl, R.; Ladner, P.; Lauber, M.; Plockinger, A. Prototyping and Experimental Investigation of Digital Hydraulically Driven Knee Exoskeleton. Energies 2022, 15, 8695. [Google Scholar] [CrossRef]
- Long, Y.; Peng, Y. Design and Control of a Quasi-Direct Drive Actuated Knee Exoskeleton. J. Bionic Eng. 2022, 19, 678–687. [Google Scholar] [CrossRef]
- Sarkisian, S.V.; Ishmael, M.K.; Lenzi, T. Self-Aligning Mechanism Improves Comfort and Performance with a Powered Knee Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 629–640. [Google Scholar] [CrossRef]
- Li, G.; Liang, X.; Lu, H.; Su, T.; Hou, Z.G. Development and Validation of a Self-Aligning Knee Exoskeleton with Hip Rotation Capability. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 472–481. [Google Scholar] [CrossRef]
- Cempini, M.; De Rossi, S.M.M.; Lenzi, T.; Vitiello, N.; Carrozza, M.C. Self-Alignment Mechanisms for Assistive Wearable Robots: A Kinetostatic Compatibility Method. IEEE Trans. Robot. 2013, 29, 236–250. [Google Scholar] [CrossRef]
- Hussain, F.; Goecke, R.; Mohammadian, M. Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2021, 235, 1375–1385. [Google Scholar] [CrossRef]
- Pratt, G.A.; Williamson, M.M. Series Elastic Actuators. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995. [Google Scholar] [CrossRef]
- Qian, Y.P.; Han, S.S.; Wang, Y.N.; Yu, H.Y.; Fu, C.L. Toward Improving Actuation Transparency and Safety of a Hip Exoskeleton with a Novel Nonlinear Series Elastic Actuator. IEEE/ASME Trans. Mechatron. 2023, 28, 417–428. [Google Scholar] [CrossRef]
- Qian, Y.; Han, S.; Aguirre-Ollinger, G.; Fu, C.; Yu, H. Design, modeling, and control of a reconfigurable rotary series elastic actuator with nonlinear stiffness for assistive robots. Mechatronics 2022, 86, 102872. [Google Scholar] [CrossRef]
- Song, J.Y.; Zhu, A.B.; Tu, Y.; Zhang, X.D.; Cao, G.Z. Novel Design and Control of a Crank-Slider Series Elastic Actuated Knee Exoskeleton for Compliant Human-Robot Interaction. IEEE/ASME Trans. Mechatron. 2023, 28, 531–542. [Google Scholar] [CrossRef]
- Meijneke, C.; van Oort, G.; Sluiter, V.; van Asseldonk, E.; Tagliamonte, N.L.; Tamburella, F.; Pisotta, I.; Masciullo, M.; Arquilla, M.; Molinari, M.; et al. Symbitron Exoskeleton: Design, Control, and Evaluation of a Modular Exoskeleton for Incomplete and Complete Spinal Cord Injured Individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 330–339. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Li, Y.; Ning, C.X.; Zeng, B. Development and Adaptive Assistance Control of the Robotic Hip Exoskeleton to Improve Gait Symmetry and Restore Normal Gait. IEEE Trans. Autom. Sci. Eng. 2022, 11, 799–809. [Google Scholar] [CrossRef]
- Zhang, T.; Ning, C.X.; Li, Y.; Wang, M. Design and Validation of a Lightweight Hip Exoskeleton Driven by Series Elastic Actuator with Two-Motor Variable Speed Transmission. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 2456–2466. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Feng, K.X.; Zeng, B.; Gong, Z.H. Design and Validation of a Lightweight Soft Hip Exosuit with Series-Wedge-Structures for Assistive Walking and Running. IEEE/ASME Trans. Mechatron. 2022, 27, 2863–2874. [Google Scholar] [CrossRef]
- Kang, I.; Peterson, R.R.; Herrin, K.R.; Mazumdar, A.; Young, A.J. Design and Validation of a Torque-Controllable Series Elastic Actuator-Based Hip Exoskeleton for Dynamic Locomotion. J. Mech. Robot. 2023, 15, 021007. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, G.; Fan, W.; Yan, W.; Kong, L.; Wang, H. A Stiffness Variable Passive Compliance Device with Reconfigurable Elastic Inner Skeleton and Origami Shell. Chin. J. Mech. Eng. 2020, 33, 75. [Google Scholar] [CrossRef]
- Baser, O.; Demiray, M.A. Selection and implementation of optimal magnetorheological brake design for a variable impedance exoskeleton robot joint. Proc. Inst. Mech. Eng. Part C-J. Eng. Mech. Eng. Sci. 2017, 231, 941–960. [Google Scholar] [CrossRef]
- Han, Y.L.; Zhu, S.Q.; Zhou, Z.; Shi, Y.; Hao, D.B. Research on a multimodal actuator-oriented power-assisted knee exoskeleton. Robotica 2017, 35, 1906–1922. [Google Scholar] [CrossRef]
- Kimura, S.; Suzuki, R.; Machida, K.; Kashima, M.; Okui, M.; Nishihama, R.; Nakamura, T. Development of an Exoskeleton-Type Assist Suit Utilizing Variable Stiffness Control Devices Based on Human Joint Characteristics. Actuators 2021, 10, 17. [Google Scholar] [CrossRef]
- Shao, Y.X.; Zhang, W.X.; Su, Y.J.; Ding, X.L. Design and optimisation of load-adaptive actuator with variable stiffness for compact ankle exoskeleton. Mech. Mach. Theory 2021, 161, 104323. [Google Scholar] [CrossRef]
- Bergmann, L.; Luck, O.; Voss, D.; Buschermohle, P.; Liu, L.; Leonhardt, S.; Ngo, C. Lower Limb Exoskeleton with Compliant Actuators: Design, Modeling, and Human Torque Estimation. IEEE/ASME Trans. Mechatron. 2022, 12, 758–769. [Google Scholar] [CrossRef]
- Sarani, B.; Ahmadi, H. Mechanical design and control of a novel variable impedance actuator (VIA) for knee joint of a rehabilitation exoskeleton. J. Braz. Soc. Mech. Sci. 2022, 44, 81. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Q.; Chen, B.; Xu, D.; Shao, Z. Design and Evaluation of a Novel Torque-Controllable Variable Stiffness Actuator with Reconfigurability. IEEE/ASME Trans. Mechatron. 2022, 27, 292–303. [Google Scholar] [CrossRef]
- Hu, B.; Liu, F.; Cheng, K.; Chen, W.; Shan, X.; Yu, H. Stiffness Optimal Modulation of a Variable Stiffness Energy Storage Hip Exoskeleton and Experiments on Its Assistance Effect. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 1045–1055. [Google Scholar] [CrossRef]
- Grosu, S.; Rodriguez-Guerrero, C.; Grosu, V.; Vanderborght, B.; Lefeber, D. Evaluation and Analysis of Push-Pull Cable Actuation System Used for Powered Orthoses. Front. Robot. AI 2018, 5, 105. [Google Scholar] [CrossRef]
- Chan, H.H.T.; Gao, F.; Chung, B.L.H.; Liao, W.H.; Cao, J.Y. Knee energy harvester with variable transmission to reduce the effect on the walking gait. Smart Mater. Struct. 2021, 30, 085024. [Google Scholar] [CrossRef]
- Park, J.; Park, S.; Kim, C.; Park, J.H.; Choi, J. Design and Control of a Powered Lower Limb Orthosis Using a Cable-Differential Mechanism, COWALK-Mobile 2. IEEE Access 2021, 9, 43775–43784. [Google Scholar] [CrossRef]
- Kieuvongngam, N.; Sutapun, A.; Sangeveraphunsiri, V. Novel Design and Implementation of a Knee Exoskeleton for Gait Rehabilitation with Impedance Control Strategy. Eng. J.-Thail. 2022, 26, 13–27. [Google Scholar] [CrossRef]
- Orekhov, G.; Lerner, Z.F. Design and Electromechanical Performance Evaluation of a Powered Parallel-Elastic Ankle Exoskeleton. IEEE Robot. Autom. Lett. 2022, 7, 8092–8099. [Google Scholar] [CrossRef]
- Chen, J.; Han, J.; Zhang, J. Design and Evaluation of a Mobile Ankle Exoskeleton with Switchable Actuation Configurations. IEEE/ASME Trans. Mechatron. 2022, 27, 1846–1853. [Google Scholar] [CrossRef]
- Zhong, B.; Shen, M.; Liu, H.; Zhao, Y.; Qian, Q.; Wang, W.; Yu, H.; Zhang, M. A Cable-Driven Exoskeleton with Personalized Assistance Improves the Gait Metrics of People in Subacute Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2560–2569. [Google Scholar] [CrossRef] [PubMed]
- Prasad, R.; El-Rich, M.; Awad, M.I.; Hussain, I.; Jelinek, H.F.; Huzaifa, U.; Khalaf, K. A Framework for Determining the Performance and Requirements of Cable-Driven Mobile Lower Limb Rehabilitation Exoskeletons. Front. Bioeng. Biotechnol. 2022, 10, 920462. [Google Scholar] [CrossRef] [PubMed]
- Asbeck, A.T.; De Rossi, S.M.M.; Galiana, I.; Ding, Y.; Walsh, C.J. Stronger, Smarter, Softer: Next-Generation Wearable Robots. IEEE Robot. Autom. Mag. 2014, 21, 22–33. [Google Scholar] [CrossRef]
- Wang, Q.N.; Zhou, Z.H.; Zhang, Z.D.; Lou, Y.; Zhou, Y.L.; Zhang, S.C.; Chen, W.W.; Mao, C.Q.; Wang, Z.L.; Lou, W.J.; et al. An Underwater Lower-Extremity Soft Exoskeleton for Breaststroke Assistance. IEEE Trans. Med. Robot. Bionics 2020, 2, 447–462. [Google Scholar] [CrossRef]
- Ye, X.; Chen, C.J.; Shi, Y.G.; Chen, L.X.; Wang, Z.; Zhang, Z.W.; Liu, Y.D.; Wu, X.Y. A Time Division Multiplexing Inspired Lightweight Soft Exoskeleton for Hip and Ankle Joint Assistance. Micromachines 2021, 12, 1150. [Google Scholar] [CrossRef]
- Ma, L.; Leng, Y.Q.; Jiang, W.; Qian, Y.P.; Fu, C.L. Design an Underactuated Soft Exoskeleton to Sequentially Provide Knee Extension and Ankle Plantarflexion Assistance. IEEE Robot. Autom. Lett. 2022, 7, 271–278. [Google Scholar] [CrossRef]
- Lee, H.D.; Park, H.; Seongho, B.; Kang, T.H. Development of a Soft Exosuit System for Walking Assistance During Stair Ascent and Descent. Int. J. Control Autom. Syst. 2020, 18, 2678–2686. [Google Scholar] [CrossRef]
- Lee, H.D.; Park, H.; Hong, D.H.; Kang, T.H. Development of a Series Elastic Tendon Actuator (SETA) Based on Gait Analysis for a Knee Assistive Exosuit. Actuators 2022, 11, 166. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Y.; Xian, X.; Wu, H.; Xie, L. Design and Control of a Flexible Exoskeleton to Generate a Natural Full Gait for Lower-Limb Rehabilitation. J. Mech. Robot. 2023, 15, 011005. [Google Scholar] [CrossRef]
- Wang, X.; Guo, S.; Bai, S. A Cable-Driven Parallel Hip Exoskeleton for High-Performance Walking Assistance. IEEE Trans. Ind. Electron. 2024, 71, 2705–2715. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, A.; Dang, D.; Shi, L. Novel Lightweight Lower Limb Exoskeleton Design for Single-Motor Sequential Assistance of Knee & Ankle Joints in Real World. IEEE Robot. Autom. Lett. 2024, 9, 2391–2398. [Google Scholar] [CrossRef]
- Xu, M.; Zhou, Z.; Wang, Z.; Ruan, L.; Mai, J.; Wang, Q. Bioinspired Cable-Driven Actuation System for Wearable Robotic Devices: Design, Control, and Characterization. IEEE Trans. Robot. 2024, 40, 520–539. [Google Scholar] [CrossRef]
- Thalman, C.M.; Hertzell, T.; Lee, H. Toward A Soft Robotic Ankle-Foot Orthosis (SR-AFO) Exosuit for Human Locomotion: Preliminary Results in Late Stance Plantarflexion Assistance. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020. [Google Scholar] [CrossRef]
- Veale, A.J.; Staman, K.; van der Kooij, H. Soft, Wearable, and Pleated Pneumatic Interference Actuator Provides Knee Extension Torque for Sit-to-Stand. Soft Robot. 2020, 8, 28–43. [Google Scholar] [CrossRef]
- Park, J.; Choi, J.; Kim, S.J.; Seo, K.-H.; Kim, J. Design of an Inflatable Wrinkle Actuator with Fast Inflation/Deflation Responses for Wearable Suits. IEEE Robot. Autom. Lett. 2020, 5, 3799–3805. [Google Scholar] [CrossRef]
- Miller-Jackson, T.M.; Natividad, R.F.; Lim, D.Y.L.; Hernandez-Barraza, L.; Ambrose, J.W.; Yeow, R.C. A Wearable Soft Robotic Exoskeleton for Hip Flexion Rehabilitation. Front. Robot. AI 2022, 9, 835237. [Google Scholar] [CrossRef]
- Yilmaz, A.F.; Ozlem, K.; Celebi, M.F.; Taherkhani, B.; Kalaoglu, F.; Atalay, A.T.; Ince, G.; Atalay, O. Design and Scalable Fast Fabrication of Biaxial Fabric Pouch Motors for Soft Robotic Artificial Muscle Applications. Adv. Intell. Syst. 2024, 6, 2300888. [Google Scholar] [CrossRef]
- Yasuhiro Maeda, Y.L.; Yasuda, K.; Hashimoto, L. Development of Variable Stiffness Gel Spats for Walking Assistance. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013. [Google Scholar] [CrossRef]
- Li, Y.; Maeda, Y.; Hashimoto, M. Lightweight, Soft Variable Stiffness Gel Spats for Walking Assistance. Int. J. Adv. Robot. Syst. 2015, 12, 175. [Google Scholar] [CrossRef]
- Li, Y.; Hashimoto, M. Development of a Lightweight Walking Assist Wear Using PVC Gel Artificial Muscles. In Proceedings of the 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016. [Google Scholar] [CrossRef]
- Li, Y.; Hashimoto, M. Design and prototyping of a novel lightweight walking assist wear using PVC gel soft actuators. Sens. Actuators A Phys. 2016, 239, 26–44. [Google Scholar] [CrossRef]
- Li, Y.; Hashimoto, M. PVC gel soft actuator-based wearable assist wear for hip joint support during walking. Smart Mater. Struct. 2017, 26, 125003. [Google Scholar] [CrossRef]
- Kim, C.; Kim, G.; Lee, Y.; Lee, G.; Han, S.; Kang, D.; Koo, S.H.; Koh, J.-s. Shape memory alloy actuator-embedded smart clothes for ankle assistance. Smart Mater. Struct. 2020, 29, 055003. [Google Scholar] [CrossRef]
- Allen, D.P.; Little, R.; Laube, J.; Warren, J.; Voit, W.; Gregg, R.D. Towards an ankle-foot orthosis powered by a dielectric elastomer actuator. Mechatronics 2021, 76, 102551. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Meijneke, C.; van Asseldonk, E.; Hoellinger, T.; Cheron, G.; Ivanenko, Y.; La Scaleia, V.; Sylos-Labini, F.; Molinari, M.; et al. Design and control of the MINDWALKER exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 277–286. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.-j.; Wang, W.-d.; Dong, W. Human motion intent learning based motion assistance control for a wearable exoskeleton. Robot. Comput.-Integr. Manuf. 2018, 49, 317–327. [Google Scholar] [CrossRef]
- Kang, I.; Kunapuli, P.; Young, A.J. Real-Time Neural Network-Based Gait Phase Estimation Using a Robotic Hip Exoskeleton. IEEE Trans. Med. Robot. Bionics 2020, 2, 28–37. [Google Scholar] [CrossRef]
- Prakash, C.; Kumar, R.; Mittal, N. Recent developments in human gait research: Parameters, approaches, applications, machine learning techniques, datasets and challenges. Artif. Intell. Rev. 2016, 49, 1–40. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y. Model-free based adaptive nonsingular fast terminal sliding mode control with time-delay estimation for a 12 DOF multi-functional lower limb exoskeleton. Adv. Eng. Softw. 2018, 119, 38–47. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Tian, Y.; Peyrodie, L.; Wang, X. Model-free based neural network control with time-delay estimation for lower extremity exoskeleton. Neurocomputing 2018, 272, 178–188. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y. A linear discrete-time extended state observer-based intelligent PD controller for a 12 DOFs lower limb exoskeleton LLE-RePA. Mech. Syst. Signal Process. 2020, 138, 106547. [Google Scholar] [CrossRef]
- Sun, J.; Wang, J.; Yang, P.; Guo, S. Model-free prescribed performance fixed-time control for wearable exoskeletons. Appl. Math. Model. 2021, 90, 61–77. [Google Scholar] [CrossRef]
- Huang, R.; Cheng, H.; Guo, H.; Lin, X.; Zhang, J. Hierarchical learning control with physical human-exoskeleton interaction. Inf. Sci. 2018, 432, 584–595. [Google Scholar] [CrossRef]
- Huang, R.; Cheng, H.; Qiu, J.; Zhang, J. Learning Physical Human–Robot Interaction with Coupled Cooperative Primitives for a Lower Exoskeleton. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1566–1574. [Google Scholar] [CrossRef]
- Wen, Y.; Si, J.; Brandt, A.; Gao, X.; Huang, H.H. Online Reinforcement Learning Control for the Personalization of a Robotic Knee Prosthesis. IEEE Trans. Cybern. 2020, 50, 2346–2356. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Shi, Y.; Chen, N.; Li, Y.; Pei, Q. Stable and High-Strain Dielectric Elastomer Actuators Based on a Carbon Nanotube-Polymer Bilayer Electrode. Adv. Funct. Mater. 2020, 31, 2008321. [Google Scholar] [CrossRef]
- He, B.; Huang, H.; Thomas, G.C.; Sentis, L. A Complex Stiffness Human Impedance Model with Customizable Exoskeleton Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2468–2477. [Google Scholar] [CrossRef]
- Saglia, J.A.; Tsagarakis, N.G.; Dai, J.S.; Caldwell, D.G. Control Strategies for Ankle Rehabilitation Using a High Performance Ankle Exerciser. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Huo, W.; Mohammed, S.; Amirat, Y. Impedance Reduction Control of a Knee Joint Human-Exoskeleton System. IEEE Trans. Control Syst. Technol. 2019, 27, 2541–2556. [Google Scholar] [CrossRef]
- Karavas, N.; Ajoudani, A.; Tsagarakis, N.; Saglia, J.; Bicchi, A.; Caldwell, D. Tele-impedance based assistive control for a compliant knee exoskeleton. Robot. Auton. Syst. 2015, 73, 78–90. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, Z.; Hu, J.; Ghosh, B.K. Event-triggered critic learning impedance control of lower limb exoskeleton robots in interactive environments. Neurocomputing 2024, 564, 126963. [Google Scholar] [CrossRef]
- dos Santos, W.M.; Siqueira, A.A. Optimal impedance via model predictive control for robot-aided rehabilitation. Control Eng. Pract. 2019, 93, 104177. [Google Scholar] [CrossRef]
- Caulcrick, C.; Huo, W.; Franco, E.; Mohammed, S.; Hoult, W.; Vaidyanathan, R. Model Predictive Control for Human-Centred Lower Limb Robotic Assistance. IEEE Trans. Med. Robot. Bionics 2021, 3, 980–991. [Google Scholar] [CrossRef]
- Gui, K.; Liu, H.; Zhang, D. A Practical and Adaptive Method to Achieve EMG-Based Torque Estimation for a Robotic Exoskeleton. IEEE/ASME Trans. Mechatron. 2019, 24, 483–494. [Google Scholar] [CrossRef]
- Gandolla, M.; Guanziroli, E.; D’Angelo, A.; Cannaviello, G.; Molteni, F.; Pedrocchi, A. Automatic Setting Procedure for Exoskeleton-Assisted Overground Gait: Proof of Concept on Stroke Population. Front. Neurorobotics 2018, 12, 10. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zeng, Y.; Yin, Y. Improving the Transparency of an Exoskeleton Knee Joint Based on the Understanding of Motor Intent Using Energy Kernel Method of EMG. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 577–588. [Google Scholar] [CrossRef] [PubMed]
- Ao, D.; Song, R.; Gao, J. Movement Performance of Human-Robot Cooperation Control Based on EMG-Driven Hill-Type and Proportional Models for an Ankle Power-Assist Exoskeleton Robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1125–1134. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Qian, K.; Bo, S.; Zhang, Z.; Li, Z.; Li, G.-Q.; Dehghani-Sanij, A.A.; Xie, S.Q. Adaptive Cooperative Control Strategy for a Wrist Exoskeleton Using Model-Based Joint Impedance Estimation. IEEE/ASME Trans. Mechatron. 2023, 28, 748–757. [Google Scholar] [CrossRef]
- Yin, K.; Xiang, K.; Pang, M.; Chen, J.; Anderson, P.; Yang, L. Personalised Control of Robotic Ankle Exoskeleton Through Experience-Based Adaptive Fuzzy Inference. IEEE Access 2019, 7, 72221–72233. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.-Y.; Wang, L.; Chen, Z.; Chai, T. Nonlinear Disturbance Observer-Based Control Design for a Robotic Exoskeleton Incorporating Fuzzy Approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Huang, P.; Li, Z.; Zhou, M.; Li, X.; Cheng, M. Fuzzy Enhanced Adaptive Admittance Control of a Wearable Walking Exoskeleton with Step Trajectory Shaping. IEEE Trans. Fuzzy Syst. 2022, 30, 1541–1552. [Google Scholar] [CrossRef]
- Sharma, R.; Gaur, P.; Bhatt, S.; Joshi, D. Optimal fuzzy logic-based control strategy for lower limb rehabilitation exoskeleton. Appl. Soft Comput. 2021, 105, 107226. [Google Scholar] [CrossRef]
- Sun, W.; Lin, J.W.; Su, S.F.; Wang, N.; Er, M.J. Reduced Adaptive Fuzzy Decoupling Control for Lower Limb Exoskeleton. IEEE Trans. Cybern. 2021, 51, 1099–1109. [Google Scholar] [CrossRef]
- Rose, L.; Bazzocchi, M.C.; Nejat, G. End-to-end deep reinforcement learning for exoskeleton control. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 4294–4301. [Google Scholar]
- Kalani, H.; Tahamipour-Z, S.M.; Kardan, I.; Akbarzadeh, A. Application of DQN Learning for Delayed Output Feedback Control of a Gait-Assist Hip Exoskeleton. In Proceedings of the 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 17–19 November 2021; pp. 341–345. [Google Scholar]
- Ashmi, M.; Akhil, V. A Control Strategy for Pneumatically Powered Below-Hip Orthosis. IRBM 2023, 44, 100791. [Google Scholar] [CrossRef]
- Martinez-Hernandez, U.; Awad, M.I.; Dehghani-Sanij, A.A. Learning architecture for the recognition of walking and prediction of gait period using wearable sensors. Neurocomputing 2022, 470, 1–10. [Google Scholar] [CrossRef]
- Yang, J.; Huang, T.-H.; Yu, S.; Yang, X.; Su, H.; Spungen, A.M.; Tsai, C.-Y. Machine Learning Based Adaptive Gait Phase Estimation Using Inertial Measurement Sensors. In Proceedings of the 2019 Design of Medical Devices Conference, Minneapolis, MN, USA, 5–18 April 2019. [Google Scholar]
- Zhou, Z.; Liu, X.; Jiang, Y.; Mai, J.; Wang, Q. Real-time onboard SVM-based human locomotion recognition for a bionic knee exoskeleton on different terrains. In Proceedings of the 2019 Wearable Robotics Association Conference (WearRAcon), Scottsdale, AZ, USA, 25–27 March 2019; pp. 34–39. [Google Scholar]
- Lee, T.; Kim, I.; Lee, S.-H. Estimation of the Continuous Walking Angle of Knee and Ankle (Talocrural Joint, Subtalar Joint) of a Lower-Limb Exoskeleton Robot Using a Neural Network. Sensors 2021, 21, 2807. [Google Scholar] [CrossRef] [PubMed]
- Stanley, M. Gait Phase Detection of Stair Ambulation Using Inertial Measurement of Lower Limb. Ph.D. Thesis, Monash University, Melbourne, Australia, 2021. [Google Scholar]
- Wei, H.; Tong, R.K.-y.; Wang, M.Y.; Chen, C. Gait Phase Detection Based on LSTM-CRF for Stair Ambulation. IEEE Robot. Autom. Lett. 2023, 8, 6029–6035. [Google Scholar] [CrossRef]
- Liu, D.-X.; Wu, X.; Du, W.; Wang, C.; Xu, T. Gait phase recognition for lower-limb exoskeleton with only joint angular sensors. Sensors 2016, 16, 1579. [Google Scholar] [CrossRef]
- Ionut, G.; Dumitru, N.; Copilusi, C.; Grigorie, L.; Tarnita, D. Kinematics and Design of a New Leg Exoskeleton for Human Motion Assistance. In Proceedings of the IFToMM International Conference on Mechanisms, Transmissions and Applications, Poitiers, France, 24–26 May 2023; pp. 199–208. [Google Scholar]
- Zhang, T.; Tran, M.; Huang, H. Design and experimental verification of hip exoskeleton with balance capacities for walking assistance. IEEE/ASME Trans. Mechatron. 2018, 23, 274–285. [Google Scholar] [CrossRef]
- Gasparri, G.M.; Luque, J.; Lerner, Z.F. Proportional joint-moment control for instantaneously adaptive ankle exoskeleton assistance. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 751–759. [Google Scholar] [CrossRef]
- Maqbool, H.F.; Husman, M.A.B.; Awad, M.I.; Abouhossein, A.; Iqbal, N.; Dehghani-Sanij, A.A. A Real-Time Gait Event Detection for Lower Limb Prosthesis Control and Evaluation. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1500–1509. [Google Scholar] [CrossRef]
- Joshi, C.D.; Lahiri, U.; Thakor, N.V. Classification of gait phases from lower limb EMG: Application to exoskeleton orthosis. In Proceedings of the 2013 IEEE Point-of-Care Healthcare Technologies (PHT), Bangalore, India, 16–18 January 2013; pp. 228–231. [Google Scholar]
- Khan, A.; Biddiss, E. Musical Stairs: A motivational therapy tool for children with disabilities featuring automated detection of stair-climbing gait events via inertial sensors. Med. Eng. Phys. 2017, 40, 95–102. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid Brain/Muscle Signals Powered Wearable Walking Exoskeleton Enhancing Motor Ability in Climbing Stairs Activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Hussain, T.; Iqbal, N.; Maqbool, H.F.; Khan, M.; Awad, M.I.; Dehghani-Sanij, A.A. Intent based recognition of walking and ramp activities for amputee using sEMG based lower limb prostheses. Biocybern. Biomed. Eng. 2020, 40, 1110–1123. [Google Scholar] [CrossRef]
- Deffieux, T.; Gennisson, J.-L.; Tanter, M.; Fink, M.; Nordez, A. Ultrafast imaging of in vivo muscle contraction using ultrasound. Appl. Phys. Lett. 2006, 89, 184107. [Google Scholar] [CrossRef]
- Tsuneyasu, K.; Ohno, A.; Fukuda, Y.; Ogawa, K.; Tsuji, T.; Kurita, Y. A soft exoskeleton suit to reduce muscle fatigue with pneumatic artificial muscles. In Proceedings of the 9th Augmented Human International Conference, Seoul, Republic of Korea, 7–9 February 2018; pp. 1–4. [Google Scholar]
- Kong, K.; Jeon, D. Design and control of an exoskeleton for the elderly and patients. IEEE/ASME Trans. Mechatron. 2006, 11, 428–432. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, X.; Zhang, Y.; Chen, C.; Liu, S.; Liu, Y.; Peng, A.; Ma, Y. A semi-active exoskeleton based on EMGs reduces muscle fatigue when squatting. Front. Neurorobotics 2021, 15, 625479. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Kim, J. Active muscle stiffness sensor based on piezoelectric resonance for muscle contraction estimation. Sens. Actuators A Phys. 2013, 194, 212–219. [Google Scholar] [CrossRef]
- Neťuková, S.; Bejtic, M.; Malá, C.; Horáková, L.; Kutílek, P.; Kauler, J.; Krupička, R. Lower Limb Exoskeleton Sensors: State-of-the-Art. Sensors 2022, 22, 9091. [Google Scholar] [CrossRef]
- Beck, T.W.; Housh, T.J.; Cramer, J.T.; Weir, J.P.; Johnson, G.O.; Coburn, J.W.; Malek, M.H.; Mielke, M. Mechanomyographic amplitude and frequency responses during dynamic muscle actions: A comprehensive review. Biomed. Eng. Online 2005, 4, 67. [Google Scholar] [CrossRef]
- Islam, M.A.; Sundaraj, K.; Ahmad, R.B.; Ahamed, N.U. Mechanomyogram for muscle function assessment: A review. PLoS ONE 2013, 8, e58902. [Google Scholar] [CrossRef]
- Meagher, C.; Franco, E.; Turk, R.; Wilson, S.; Steadman, N.; McNicholas, L.; Vaidyanathan, R.; Burridge, J.; Stokes, M. New advances in mechanomyography sensor technology and signal processing: Validity and intrarater reliability of recordings from muscle. J. Rehabil. Assist. Technol. Eng. 2020, 7, 2055668320916116. [Google Scholar] [CrossRef]
- Ang, K.K.; Chua, K.S.G.; Phua, K.S.; Wang, C.; Chin, Z.Y.; Kuah, C.W.K.; Low, W.; Guan, C. A randomized controlled trial of EEG-based motor imagery brain-computer interface robotic rehabilitation for stroke. Clin. EEG Neurosci. 2015, 46, 310–320. [Google Scholar] [CrossRef]
- Yang, N.; An, Q.; Kogami, H.; Yamakawa, H.; Tamura, Y.; Takahashi, K.; Kinomoto, M.; Yamasaki, H.; Itkonen, M.; Shibata-Alnajjar, F. Temporal features of muscle synergies in sit-to-stand motion reflect the motor impairment of post-stroke patients. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2118–2127. [Google Scholar] [CrossRef]
- De Venuto, D.; Mezzina, G. Multisensing architecture for the balance losses during gait via physiologic signals recognition. IEEE Sens. J. 2020, 20, 13959–13968. [Google Scholar] [CrossRef]
- Frisoli, A.; Loconsole, C.; Leonardis, D.; Banno, F.; Barsotti, M.; Chisari, C.; Bergamasco, M. A new gaze-BCI-driven control of an upper limb exoskeleton for rehabilitation in real-world tasks. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2012, 42, 1169–1179. [Google Scholar] [CrossRef]
- Chaisaen, R.; Autthasan, P.; Mingchinda, N.; Leelaarporn, P.; Kunaseth, N.; Tammajarung, S.; Manoonpong, P.; Mukhopadhyay, S.C.; Wilaiprasitporn, T. Decoding EEG rhythms during action observation, motor imagery, and execution for standing and sitting. IEEE Sens. J. 2020, 20, 13776–13786. [Google Scholar] [CrossRef]
- Lu, J.; Mamun, K.A.; Chau, T. Pattern classification to optimize the performance of Transcranial Doppler Ultrasonography-based brain machine interface. Pattern Recognit. Lett. 2015, 66, 135–143. [Google Scholar] [CrossRef]
- Khalaf, A.; Sejdic, E.; Akcakaya, M. A novel motor imagery hybrid brain computer interface using EEG and functional transcranial Doppler ultrasound. J. Neurosci. Methods 2019, 313, 44–53. [Google Scholar] [CrossRef]
- Huang, H.; Dou, Z.; Zhang, F.; Nunnery, M.J. Improving the performance of a neural-machine interface for artificial legs using prior knowledge of walking environment. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 4255–4258. [Google Scholar]
- Du, L.; Zhang, F.; Liu, M.; Huang, H. Toward design of an environment-aware adaptive locomotion-mode-recognition system. IEEE Trans. Biomed. Eng. 2012, 59, 2716–2725. [Google Scholar]
- Khademi, G.; Simon, D. Convolutional neural networks for environmentally aware locomotion mode recognition of lower-limb amputees. In Proceedings of the Dynamic Systems and Control Conference, Park City, UT, USA, 8–11 October 2019; p. V001T007A005. [Google Scholar]
- Zhang, K.; Zhang, W.; Xiao, W.; Liu, H.; De Silva, C.W.; Fu, C. Sequential decision fusion for environmental classification in assistive walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1780–1790. [Google Scholar] [CrossRef]
- Zhong, B.; Da Silva, R.L.; Li, M.; Huang, H.; Lobaton, E. Environmental context prediction for lower limb prostheses with uncertainty quantification. IEEE Trans. Autom. Sci. Eng. 2020, 18, 458–470. [Google Scholar] [CrossRef]
- Laschowski, B.; McNally, W.; Wong, A.; McPhee, J. Computer vision and deep learning for environment-adaptive control of robotic lower-limb exoskeletons. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Virtual, 1–5 November 2021; pp. 4631–4635. [Google Scholar]
- Krausz, N.E.; Lenzi, T.; Hargrove, L.J. Depth sensing for improved control of lower limb prostheses. IEEE Trans. Biomed. Eng. 2015, 62, 2576–2587. [Google Scholar] [CrossRef]
- Liu, M.; Wang, D.; Huang, H. Development of an environment-aware locomotion mode recognition system for powered lower limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 434–443. [Google Scholar] [CrossRef]
- Kleiner, B.; Ziegenspeck, N.; Stolyarov, R.; Herr, H.; Schneider, U.; Verl, A. A radar-based terrain mapping approach for stair detection towards enhanced prosthetic foot control. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 105–110. [Google Scholar]
- Krausz, N.E.; Hargrove, L.J. Sensor fusion of vision, kinetics, and kinematics for forward prediction during walking with a transfemoral prosthesis. IEEE Trans. Med. Robot. Bionics 2021, 3, 813–824. [Google Scholar] [CrossRef]
- Laschowski, B.; McNally, W.; Wong, A.; McPhee, J. Environment classification for robotic leg prostheses and exoskeletons using deep convolutional neural networks. Front. Neurorobotics 2022, 15, 730965. [Google Scholar] [CrossRef] [PubMed]
- Xiao, J.; Wang, M.Y.; Chen, C. A Novel Shape Memory Alloy Modular Robot with Spatially Stable Structure. Adv. Intell. Syst. 2024, 6, 2400091. [Google Scholar] [CrossRef]
- Plaza, A.; Hernandez, M.; Puyuelo, G.; Garces, E.; Garcia, E. Lower-limb medical and rehabilitation exoskeletons: A review of the current designs. IEEE Rev. Biomed. Eng. 2021, 16, 278–291. [Google Scholar] [CrossRef]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord. Med. 2012, 35, 96–101. [Google Scholar] [CrossRef]
- Chinimilli, P.T.; Qiao, Z.; Sorkhabadi, S.M.R.; Jhawar, V.; Fong, I.H.; Zhang, W. Automatic Virtual Impedance Adaptation of a Knee Exoskeleton for Personalized Walking Assistance. Robot. Auton. Syst. 2019, 114, 66–76. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.J.; Delp, S.L.; Collins, S.H. Personalizing exoskeleton assistance while walking in the real world. Nature 2022, 610, 277–282. [Google Scholar] [CrossRef]
- Tu, X.; Li, M.; Liu, M.; Si, J.; Huang, H.H. A data-driven reinforcement learning solution framework for optimal and adaptive personalization of a hip exoskeleton. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Shushtari, M.; Nasiri, R.; Arami, A. Online Reference Trajectory Adaptation: A Personalized Control Strategy for Lower Limb Exoskeletons. IEEE Robot. Autom. Lett. 2021, 7, 128–134. [Google Scholar] [CrossRef]
- Tao, J.; Zhou, Z. Review of Key Technologies for Developing Personalized Lower Limb Rehabilitative Exoskeleton Robots. J. Shanghai Jiaotong Univ. (Sci.) 2022, 29, 16–28. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, Z.; Huang, C.; Chen, L.; Guo, Q. Human-exoskeleton coupling dynamics in the swing of lower limb. Appl. Math. Model. 2022, 104, 439–454. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, Z.; Huang, C.; Guo, Q. Modelling and analysis of coupling dynamics of swinging a lower limb exoskeleton. Nonlinear Dyn. 2022, 111, 1213–1234. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Yan, Y.; Shi, Y. Model identification and adaptive control of lower limb exoskeleton based on neighborhood field optimization. Mechatronics 2022, 81, 102699. [Google Scholar] [CrossRef]
- Huang, C.; Ji, S.; Chen, Z.; Sun, T.; Guo, Q.; Yan, Y. Identification and Analysis of Human-Exoskeleton Coupling Parameters in Lower Extremities. IEEE Trans. Haptics 2024, 1–12. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y. Output Constrained Control of Lower Limb Exoskeleton Based on Knee Motion Probabilistic Model with Finite-Time Extended State Observer. IEEE/ASME Trans. Mechatron. 2023, 28, 2305–2316. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Xiong, H.; Jiang, D.; Yan, Y. Control and Implementation of 2-DOF Lower Limb Exoskeleton Experiment Platform. Chin. J. Mech. Eng. 2021, 34, 22. [Google Scholar] [CrossRef]
- Shi, Y.; Kou, J.; Chen, Z.; Wang, Y.; Guo, Q. Model Parameters Identification and Backstepping Control of Lower Limb Exoskeleton Based on Enhanced Whale Algorithm. Chin. J. Mech. Eng. 2024, 37, 26. [Google Scholar] [CrossRef]
- Guo, Q.; Chen, Z.; Yan, Y.; Xiong, W.; Jiang, D.; Shi, Y. Model Identification and Human-robot Coupling Control of Lower Limb Exoskeleton with Biogeography-based Learning Particle Swarm Optimization. Int. J. Control Autom. Syst. 2022, 20, 589–600. [Google Scholar] [CrossRef]
- Song, G.; Huang, R.; Qiu, J.; Cheng, H.; Fan, S. Model-based Control with Interaction Predicting for Human-coupled Lower Exoskeleton Systems. J. Intell. Robot. Syst. 2020, 100, 389–400. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Li, T.; Yan, Y.; Jiang, D. Gait Prediction and Variable Admittance Control for Lower Limb Exoskeleton with Measurement Delay and Extended-State-Observer. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 8693–8706. [Google Scholar] [CrossRef]
- Frolov, A.A.; Mokienko, O.; Lyukmanov, R.; Biryukova, E.; Kotov, S.; Turbina, L.; Nadareyshvily, G.; Bushkova, Y. Post-stroke rehabilitation training with a motor-imagery-based brain-computer interface (BCI)-controlled hand exoskeleton: A randomized controlled multicenter trial. Front. Neurosci. 2017, 11, 400. [Google Scholar] [CrossRef]
- Orhan, Z.O.; Prete, A.D.; Bolotnikova, A.; Gandolla, M.; Ijspeert, A.; Bouri, M. Real-Time Locomotion Transitions Detection Maximizing Performances with Minimal Resources. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2024), Yokohama, Japan, 13–17 May 2024. [Google Scholar]
- Kutilek, P.; Volf, P.; Viteckova, S.; Smrcka, P.; Krivanek, V.; Lhotska, L.; Hana, K.; Doskocil, R.; Navratil, L.; Hon, Z.; et al. Wearable systems for monitoring the health condition of soldiers: Review and application. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 748–752. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| Qian et al. [20,21] | Song et al. [22] | Meijneke et al. [23] | |
 |  |  | |
| Year | 2023 | 2023 | 2021 |
| Active Joint | hip | Knee | hip, knee, ankle |
| Angle (°) | hip (−135~135) | knee (0~120) | - |
| Speed (m/s) | 0.8 | 1.2 | 1.3 |
| Continuous Torque (Nm) | 6.6 | 45 | - |
| Max torque (Nm) | 19.8 | 102 | 102 |
| Stiffness | 24.5 KN/m | (220~440) N·m/rad | 1500 Nm/rad |
| Exoskeleton’s Weight (kg) | 2 W | 1.4 OL W | 12.8 + 24.4 W |
| Load (kg) | - | - | - |
| Zhang et al. [24,25] | Zhang et al. [26] | Kang et al. [27] | |
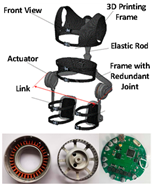 |  |  | |
| Year | 2022 | 2022 | 2023 |
| Active Joint | hip | hip | hip |
| Angle (°) | - | - | hip (−130~130) |
| Speed (m/s) | 1.4 | 2.2 | - |
| Continuous Torque (Nm) | - | 27 | 60 |
| Max torque (Nm) | 62 | - | 108 |
| Stiffness | (0.7 or 0.9) Nm/deg | - | 593 Nm/rad |
| Exoskeleton’s Weight (kg) | 2.95 W | 1.4 | 4.8 W |
| Load (kg) | 4 | - | - |
| Kimura et al. [31] | Shao et al. [32] | Bergmann et al. [33] | |
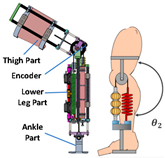 |  |  | |
| Year | 2021 | 2021 | 2022 |
| Active Joint | knee | ankle | hip, knee |
| Angle (°) | knee (0~90) | ankle (−45~135) | - |
| Speed (m/s) | 1.25 | - | 0.28 |
| Continuous Torque (Nm) | - | - | hip 64.2, knee 40.1 |
| Max torque (Nm) | 20 | - | - |
| Stiffness | (0~0.197) Nm/deg | (10~rigid) N/mm | hip (265~515), knee (196~408) Nm/rad |
| Exoskeleton’s Weight (kg) | 3.1 OL | 0.77 per actuator | 14.4 W |
| Sarani et al. [34] | Zhu et al. [35] | Hu et al. [36] | |
 |  |  | |
| Year | 2022 | 2022 | 2023 |
| Active Joint | knee | knee | hip |
| Angle (°) | knee (−180~180) | knee (0~135) | hip (−20~20) |
| Speed (m/s) | - | - | - |
| Continuous Torque (Nm) | 99.76 | 19 | 17.5~49 |
| Max torque (Nm) | - | 66.6 | - |
| Stiffness | (98~533.6) Nm/rad | (3.5~549) Nm/rad | (50~120) Nm/rad |
| Exoskeleton’s Weight (kg) | 3 per actuator | 2.8 OL W | 3.32 |
| Chan et al. [38] | Park et al. [39] | Kieuvongngam et al. [40] | |
 |  |  | |
| Year | 2021 | 2021 | 2022 |
| Active Joint | knee | hip, knee | knee |
| Angle (°) | - | - | knee (0~70) |
| Speed (m/s) | 1.11 | 1.22 | - |
| Continuous Torque (Nm) | - | - | - |
| Max torque (Nm) | 20 | hip 62, knee 78.12 | - |
| Exoskeleton’s Weight (kg) | 0.483 OL | 14 W | 2.1 W |
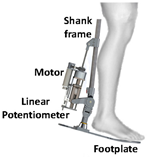
| Orekhov et al. [41] | Chen et al. [42] | Zhong et al. [43] | |
 |  |  | |
| Year | 2022 | 2022 | 2023 |
| Active Joint | ankle | ankle | hip, knee, ankle |
| Angle (°) | - | ankle (−50~30) | - |
| Speed (m/s) | 0.75~1.25 | 1.25 or 2 | - |
| Continuous Torque (Nm) | 19.9 | - | - |
| Max torque (Nm) | 22 | 50 | 17 |
| Exoskeleton’s Weight (kg) | 2.5 W | 2.55 W | 4.5 W |
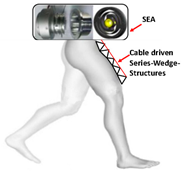
| Wang et al. [46] | Ye et al. [47] | Ma et al. [48] | Lee et al. [49,50] | |
 |  |  |  | |
| Year | 2020 | 2021 | 2022 | 2022 |
| Active Joint | ankle | hip, ankle | knee, ankle | knee |
| Speed (m/s) | - | - | 1.25 | 1.11 |
| Continuous Torque or Force | 840 N | - | - | 38 N |
| Max Torque or Force | 1700 N | hip 62.5 N, ankle 80 N | 600 N | 226 N |
| Exoskeleton’s Weight (kg) | 2.9 W | 2.24 W | 5.4 W | 6.9 W |
| Biao et al. [51] | Wang et al. [52] | Wu et al. [53] | Xu et al. [54] | |
 |  |  |  | |
| Year | 2023 | 2024 | 2024 | 2024 |
| Active Joint | hip, knee, ankle | hip | knee, ankle | ankle |
| Speed (m/s) | 0.25 | 0.833 | 0.78~1.48 | - |
| Continuous Torque or Force | - | - | 18 | 8 |
| Max Torque or Force | hip 32 Nm, knee 21 Nm, ankle 13 Nm | 32.62 | 23 | 16 |
| Exoskeleton’s Weight (kg) | 4.8 W | 3.62 W | 1.4 OL + 1.1 W | 1.1 OL |
| Thalman et al. [55] | Veale et al. [56] | Park et al. [57] | Miller-Jackson et al. [58] | Yilmaz et al. [59] | |
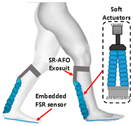 |  |  |  |  | |
| Year | 2020 | 2020 | 2020 | 2022 | 2024 |
| Active Joint | ankle | knee | knee | hip | ankle |
| Angle (°) | ankle (−20~30) | knee (0~82) | knee (0~160) | hip (−15~30) | ankle (0~20) |
| Max Torque or Force | 118.2 ± 3.1 N | 324 Nm | 12.3 Nm | 31 Nm | 107 |
| Exoskeleton’s Weight (kg) | - | 1.95 OL | 0.1 OL | - | - |
| Flexibility | Types | Benefits | Drawbacks |
|---|---|---|---|
| Rigid | Hydraulic actuator | Stable and high driving force; | Common: Bulky, uncomfortable, high inertia and structural complexity; Hard to tightly fit to the wearer might cause misalignment issues; Hydraulic: Low driving speed; High pollution due to oil leakage; Motor: Low stability impact; |
| Motor actuator | Stable, driving force, fast response, compact and high control accuracy; Rotation range is only limited by rigid fixed structure; | ||
| Flexible | SEA and RSEA | High fidelity torque control, enhances the safety and robustness of the structure; Lower mechanical impedance and shock tolerance; | Bulky and complex structure; |
| Variable stiffness | Variable stiffness can ensure the wearer’s safety, improve shock absorption performance, and reduce control complexity and energy consumption; | Bulky complex structure and lack of robustness; | |
| Cable connection | The small motion inertia of the limb ends, and the simple structure can greatly enhance human interaction safety and minimize the wearer’s discomfort; | The Bowden cable may experience intermittent instantaneous relaxation; | |
| Soft | Cable exosuit | Rapid response, lightweight and simple structure; Can fit wearer’s body; | The Bowden cable may experience intermittent instantaneous relaxation; |
| Pneumatic exosuit | Common: Lightweight, safe, high force/weight ratio; Friendly interaction with humans; Comfortable and can fit wearer’s body; Pneumatic: Safer; PVC: Low cost; SMA: Simple structure; DEA: High response speed; | Common: Low stiffness, hard to control precisely, cannot support the wearer because of low stiffness; Pneumatic: Poor air tightness, air pumps are required, noise from the air pumps; PVC: Performance will decline with long-term use, not environmentally friendly; SMA: Slow response with a nonlinear hysteresis effect; High temperatures may be harmful to the human body; DEA: High driving voltage, which may harm humans; | |
| Others |
| Level | Strategy | Principle | Advantages |
|---|---|---|---|
| Decision level | Rule-based | Use predefined logic based on experience to govern the movements and responses | - The deterministic nature of rule-based systems makes them straight forward to design and implement - Lack of complex algorithms which reduced computational requirements |
| Pre-trained | Based on prior data to capturing user behavior | - Handle diverse user behaviors which are suitable for wide range of task - Robust to data contamination | |
| Model-free | Learn to control through real-time interaction and feedback | - Performs well in unpredictable or highly dynamic environments - Adapt to different users or tasks without requiring significant manual reconfiguration | |
| Execution level | Impedance control | Create virtual mechanical impedance (mass, damping, and stiffness) between the exoskeleton and user | - Ensure compliant and smooth interactions, reducing the risk of injury - Adjust to suit different users, tasks or environmental conditions by modifying the impedance parameters |
| Predictive control | Use dynamic model of the system to predict and optimize the behavior over a future time horizon | - Optimal control by considering system dynamics and objectives over a prediction horizon - Explicitly incorporates physical and operational constraints, ensuring safe and feasible control | |
| EMG-based control | Utilizes electrical signals generated by muscle activity to govern the exoskeleton | - Provide an intuitive and seamless interface directly from muscle activity - Unique to everyone, allowing for highly personalized control strategies | |
| Fuzzy control | Use fuzzy logic to handle systems with uncertainty, imprecision, or nonlinearity | - Effectively manages imprecise or noisy inputs, robust in real-world scenarios - No requirement for an exact mathematical model of the system | |
| Reinforcement learning/Deep reinforcement learning | The exoskeleton learn to make decisions by interacting with an pre-defined environment | - Highly adaptable to dynamic environments and task since it learns directly from interaction - No requirement of an explicit model, suitable for complex systems |
| Sensors | Reliability | Limitations |
|---|---|---|
| Kinematic Sensors | - Provide detailed motion data (e.g., accelerations, angular velocities) with high temporal resolution. - Useful for real-time gait phase detection and activity monitoring. | - Susceptible to drift and noise over extended use, especially in dynamic movements. - Require robust calibration and placement for accurate readings. |
| Kinetics Sensors | - Deliver accurate measurements of ground reaction forces and pressure distribution. - Essential for understanding load dynamics during ambulation. | - Often bulky and difficult to integrate into wearable systems. - Sensitive to surface irregularities and misalignment. |
| Muscle Activity Sensors | - Provide direct insight into muscle activation patterns, essential for user intent detection. - Widely validated in laboratory conditions. | - Signal quality is highly affected by motion artifacts, skin impedance, and electrode placement. - Limited ability to capture deeper muscle activities or consistent readings during prolonged use. |
| Brain Activity Sensors | - Allow for intuitive user intent detection by directly interpreting neural signals. - Effective in controlled environments and low-noise conditions. | - Prone to interference from electrical noise and environmental factors. - Long setup times and potential discomfort with traditional wet electrodes. - Dry electrode systems may sacrifice signal quality. |
| Computer Vision and Range Sensors | - Excellent for environmental awareness, obstacle detection, and terrain mapping. - Capable of capturing 3D spatial information for navigation and adjustment. | - Performance degrades in low-light conditions or with reflective surfaces. - High computational demands and integration complexity in wearable systems. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Xiao, J.; Wei, H.; Wang, M.Y.; Chen, C. Review on Portable-Powered Lower Limb Exoskeletons. Sensors 2024, 24, 8090. https://doi.org/10.3390/s24248090
Jiang C, Xiao J, Wei H, Wang MY, Chen C. Review on Portable-Powered Lower Limb Exoskeletons. Sensors. 2024; 24(24):8090. https://doi.org/10.3390/s24248090
Chicago/Turabian StyleJiang, Chunyu, Junlong Xiao, Haochen Wei, Michael Yu Wang, and Chao Chen. 2024. "Review on Portable-Powered Lower Limb Exoskeletons" Sensors 24, no. 24: 8090. https://doi.org/10.3390/s24248090
APA StyleJiang, C., Xiao, J., Wei, H., Wang, M. Y., & Chen, C. (2024). Review on Portable-Powered Lower Limb Exoskeletons. Sensors, 24(24), 8090. https://doi.org/10.3390/s24248090