1. Introduction
Traditional hydrological measurement techniques include water level measurement, flow velocity measurement, and water volume estimation. Water level and flow velocity measurements are primarily utilized in fields such as freshwater fisheries research, river hydrology studies, river navigation safety, flood and drought prevention, and comprehensive water resource management [
1]. Currently, water measurement techniques predominantly rely on contact-based methods, using conventional cableways or measurement boats to gauge water levels and flow velocities. However, these methods encounter challenges such as low operational efficiency, high safety risks, significant manual measurement errors, and interference from water impurities. With advancements in society, technology, and economics, new measurement methods and signal processing technologies have continued to emerge. To meet the demands for high resolution, high precision, strong disturbance resistance, ease of installation, low maintenance costs, and measurement safety, non-contact radar measurement technology is increasingly being researched and applied for the remote monitoring of rivers, wells, sedimentation basins, and water treatment facilities [
2].
Radar is a technology that employs radio waves to detect, measure, and track targets. By emitting radio electromagnetic waves and receiving the signals reflected from targets, radar can determine and locate the target’s spatial position by analyzing these reflected signals. Even under various interference conditions such as wind, rain, fog, light, humidity, and temperature, radar can still determine the angular position, range, speed, and other identifying features of targets [
3]. Common radar systems are categorized into continuous wave (CW) and pulse wave systems [
4], as shown in
Table 1. Compared to the pulse radar, the CW radar features separate transmitting and receiving devices, allowing for simultaneous signal transmission and reception, virtually eliminating detection blind spots caused by the time gaps between transmission and reception [
5]. The frequency-modulated continuous-wave (FMCW) radar provides advantages such as low-power consumption, no range blind spots, low cost, high resolution, and strong anti-interference capabilities. Consequently, the FMCW radar is extensively used in hydrology due to its high-precision measurement capabilities and low cost. The FMCW radar measures the range and velocity of targets by estimating the range and Doppler frequencies from the beat signal. The accuracy of range and velocity estimates is directly linked to the accuracy of the range and Doppler frequency estimates derived from the beat signal [
6,
7]. Therefore, accurately and rapidly performing joint estimation for the range and velocity of targets using the FMCW radar in complex environments has become a key focus in radar measurement research.
The FMCW radar estimates the range and velocity of targets by analyzing the frequency shifts caused by the Doppler effect and the time delays of reflected signals. The 2D-FFT algorithm [
8,
9,
10] is a widely used method for joint range and velocity estimation in FMCW radar systems. However, the fast Fourier transform (FFT) algorithm [
11,
12] faces challenges such as aliasing, spectral leakage, and the fence effect, which results in substantial errors in the amplitude, frequency, and phase estimates of the detected signals. Moreover, the Fourier transform is sensitive to noise [
13], especially in low signal-to-noise ratio (SNR) conditions, which limits the ability of the FFT-based method to accurately estimate the target information. Ali et al. [
8] proposed a 2D-FFT algorithm for detecting extremely weak moving targets with FMCW radar, which enables accurate range–velocity pairing while providing strong anti-jamming capability, though it suffers from high complexity and poor stability. Song et al. [
9] developed a 2D-FFT algorithm that addresses the range–velocity ambiguity problem by employing multiple frequency ramps, but their approach has high false-alarm rates and limited resolution. Seifallah et al. [
10] combined the 2D-FFT algorithm with the Newton gradient algorithm for parameter estimation, improving spatial resolution and reducing computational complexity. Furthermore, researchers have proposed other new algorithms, such as spectrum refinement algorithms [
14], ratio algorithms [
15], phase difference algorithms [
16], super-resolution algorithms [
17], and sparse optimization algorithms [
18]. These algorithms aim to overcome the limitations of existing algorithms in terms of low resolution, poor accuracy, weak robustness, and high computational complexity. To improve frequency resolution and estimation accuracy, Wen et al. [
19] utilized the 2D-Unitary ESPRIT algorithm for joint range and velocity estimation in FMCW radar, but it suffers from high computational complexity. Similarly, Kim et al. [
20] proposed a range–Doppler estimation method based on the FFT-MUSIC algorithm, but its performance degrades in nonlinear noisy environments. To reduce the computational complexity, Kim et al. [
21] proposed two low-complexity algorithms, though their resolution and accuracy degrade in complex multi-target environments. Moussa [
22] proposed a two-stage algorithm that decouples range and Doppler domains using one-dimensional searches and the CLEAN technique [
23] for pairing estimated parameters of multiple targets. However, their method still encounters significant mismatch rates under low SNR conditions.
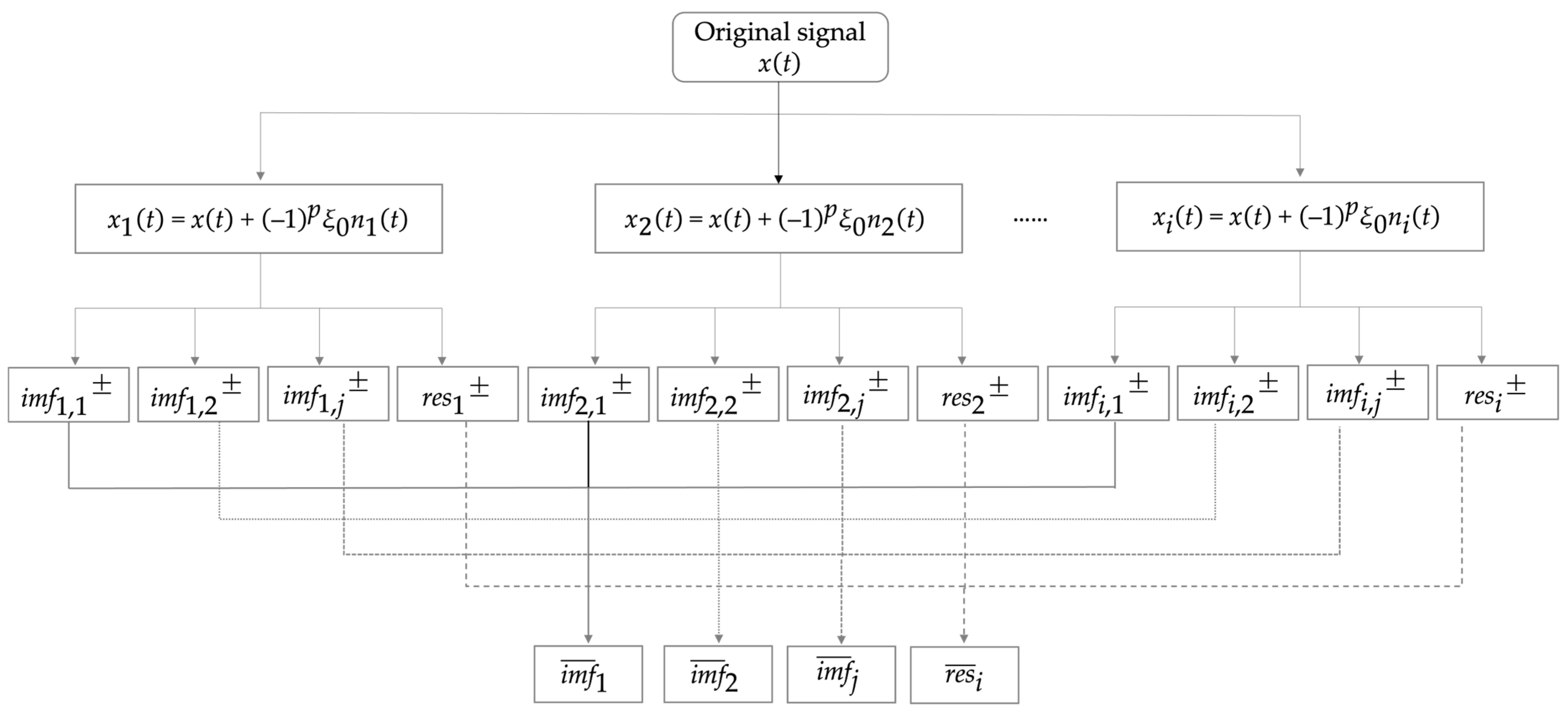
To tackle the issues of poor resolution, low-estimation accuracy, and weak robustness for range and velocity estimation of the existing algorithms in low SNR environments, this paper proposes to reconstruct the beat signal by utilizing the complementary ensemble empirical mode decomposition (CEEMD) and the singular value decomposition (SVD) to denoise the beat signal before applying the FFT-Root-MUSIC algorithm for joint range and velocity estimation based on FMCW radar, resulting in the CEEMD-SVD-FFT-Root-MUSIC (abbreviated as CEEMD-SVD-FRM) algorithm. Firstly, the empirical mode decomposition (EMD) [
24] method was explored. To overcome the mode-mixing problem in EMD and achieve complete signal decomposition, the CEEMD method [
25] is applied to the intermediate frequency signal (IFS), which is expressed as a discrete time-domain signal in (6). The CEEMD adds pairs of white noise with equal amplitude and opposite signs to the signal, which effectively cancels out during decomposition. This method decomposes the signal into several intrinsic mode functions (IMFs) and the residuals to reduce reconstruction errors. For the set of IMFs obtained after decomposition, those with higher correlation to the original signal contain more effective signal and noise. Therefore, the correlation coefficients are utilized to select the IMFs that have high correlation with the original signal, preserving significant effective information while suppressing noise. As the residual noise can propagate from higher-frequency IMFs to lower-frequency IMFs and affect the entire signal, the SVD method [
26] is utilized for noise reduction, implementing the combined use of CEEMD and SVD. Then, new high-correlation IMFs are obtained by selecting an appropriate number of largest singular values of the SVD. After denoising, the denoised IMFs and the signal residual are reconstructed to obtain the denoised reconstructed signal. Based on this reconstructed signal, the FFT and Root-MUSIC algorithm are applied to estimate the range frequency and Doppler frequency, and then the range and velocity of the targets are obtained. Finally, the simulation experiments validate that the proposed CEEMD-SVD-FRM algorithm achieves higher resolution, estimation accuracy, and robustness in joint range and velocity estimation compared to the existing algorithms, especially in low SNR conditions.
The main contributions of this paper are as follows. Firstly, the CEEMD and SVD methods are jointly utilized to denoise and reconstruct the beat signal to mitigate the negative impact of the noise on the estimation performance of the range and velocity estimation in the FMCW radar. As the CEEMD utilizes multiple IMFs to represent the signal characteristics, it effectively avoids the limitations of FFT and handles the non-stationary and non-linear characteristics caused by target movement, multipath effects, and radar hardware or dynamic influences. Moreover, to mitigate the impact of residual noise from the CEEMD on the signal, the SVD method is employed to further denoise the signal while preserving the effective signal. By selecting an appropriate number of largest singular values of the SVD, the denoised high-correlation IMFs and residuals are reconstructed to obtain the denoised signal. Based on the reconstructed signal, the FFT and Root-MUSIC algorithms are jointly utilized to achieve joint range and velocity estimation.
The remainder of this paper is organized as follows:
Section 2 describes the signal model and related works.
Section 3 describes the proposed CEEMD-SVD-FRM algorithm, with a specific emphasis on the joint denoising process that integrates CEEMD and SVD method. In
Section 4, both simulation and field test results are presented, with a comparative analysis against existing algorithms to highlight the performance of the proposed method. Finally,
Section 5 concludes the paper, discussing the significance of the findings and suggesting potential directions for future research.
3. Proposed CEEMD-SVD-FRM Algorithm for Joint Range and Velocity Estimation
In this section, the CEEMD-SVD-FRM algorithm for joint range and velocity estimation is described in detail. This algorithm utilizes the CEEMD-SVD method to reconstruct the beat signal for denoising, and then applies the FFT-Root-MUSIC algorithm to the reconstructed beat signal for joint range and velocity estimation.
The denoising process using the CEEMD-SVD method is as follows. First, the IFS
x(
n, m) in (6), which contains noise components, is used as the original signal for denoising. A new signal is constructed by repeatedly adding pairs of positive and negative additive Gaussian white noise
n(
t) with an equal amplitude of
to the original signal, as follows:
where
p is the coefficient controlling the sign of the noise, and
is generated by multiplying a standard normal random variable
by the parameter
. The
represents the ratio of the noise standard deviation to the standard deviation of the original signal, and it controls the noise strength relative to the original signal. And
is the number of noise additions, where
is the total number of noise-added signals, as each addition includes two signals controlled by
.
Next, the EMD is applied to the new signal
, which includes the
added Gaussian white noise, yielding several IMFs
and a residual component
.
where
denotes the layer number of the IMF components obtained from the decomposition of the signal
,
.
Subsequently, for each input signal
, the signal is decomposed to obtain
IMFs, denoted as
. Compute the average of these IMFs to obtain the
IMF component of the ensemble empirical mode decomposition (EEMD), denoted as
:
Thus, during this process, the overall reconstruction error of the CEEMD is given by
From (23), it can be observed that the reconstruction error of the CEEMD is zero, effectively resolving the reconstruction error issue encountered in the EEMD during the processing. The flowchart of the CEEMD is illustrated in
Figure 2.
In the actual processing, the original signal is the
in (6). After adding Gaussian white noise
times (where
) to the original signal, each chirp of the signal
is decomposed, and the obtained
IMFs can be expressed as in (24), along with a residual component
.
Although CEEMD mitigates the interference caused by adding a single Gaussian white noise in EMD by adding paired positive and negative Gaussian white noise, which cancels out during decomposition, the residual noise still exists and can affect the signal. Moreover, this residual noise tends to transfer from high-frequency IMFs to low-frequency IMFs. Therefore, in the proposed CEEMD-SVD method, the SVD method is proposed to be utilized during the CEEMD process to further denoise and reduce the impact of residual noise on the signal.
After obtaining the IMFs and residuals through the CEEMD, the correlation between each IMF component and the original signal is used to indicate the degree of relationship between these two variables [
35]. The
IMF components obtained through the CEEMD are denoted as
, as shown in (24). So, the correlation coefficient between each IMF component and the original signal is expressed as
where
denotes the original signal,
represents the covariance between
and
, and
and
are their respective standard deviations.
and
denote their respective means. The correlation coefficient ranges from
. The larger the absolute value of the correlation coefficient, the stronger the relationship between the variables.
For the
IMFs obtained through CEEMD, their correlation with the original signal is calculated using (25). An appropriate threshold is applied to select
IMFs that are highly correlated with the original signal. These components can be represented by a
two-dimensional matrix, where
N represents the number of sampling points. Thus, the
IMFs can be reconstructed into signal
and its norm is
The total energy of the signal can be represented as
where
trace{ } denotes the trace of the matrix, which is equal to the sum of its diagonal elements.
Under the condition
, the rank of the matrix
is
. By selecting the top
singular values for matrix reconstruction, the reconstructed matrix is denoted as
and can be expressed as
where
represents a diagonal matrix, with
, i.e.,
.
and
are orthogonal matrices formed by the eigenvectors of
and
, respectively.
From (27) and (28), the following can be obtained:
As can be seen from (30), the total energy of the signal is equal to the sum of the diagonal elements of the matrix, which corresponds to the sum of the non-zero singular values. During the signal reconstruction, larger singular values indicate stronger signal energy and make a more significant contribution to the reconstruction.
In summary, the process of the CEEMD-SVD joint denoising method is as follows: First,
IMFs obtained through CEEMD by adding noise G times, as shown in (24). Then, using (25), the correlation between each IMF and the original signal is calculated. The
highly correlated IMFs are selected and reconstructed into
, as given in (26). Next,
is decomposed using SVD, and the top
singular values are chosen for signal reconstruction, as shown in (28). Finally, the components
in (28) and a residual
obtained after the CEEMD-SVD method are utilized to obtain the reconstructed signal
, where
.
Then, the FFT-Root-MUSIC algorithm is applied to the reconstructed signal ) for joint range and velocity estimation. In contrast to the standard MUSIC algorithm, the Root-MUSIC eliminates the requirement for spectral peak searching, thus significantly reducing computational complexity.
Firstly, an
-point FFT is performed on the reconstructed signal
) to obtain the range frequency domain signal
, similar to (7). Then, the peak detection is then applied to
to identify the range peak index
for the
target. The peak frequency of the
target, i.e., its range frequency
, is determined by the peak index
and the frequency resolution
as follows:
where the frequency resolution
. Then, the range of the detected
target is estimated using the (11).
Next, all range units corresponding to each target [
20] are expressed as
The
target is selected as the Doppler input, that is to say, the range FFT result
of the
target is set as the input signal for the Root-MUSIC algorithm.
Next,
is submitted into (14) to obtain the correlation matrix, which is used by the Root-MUSIC algorithm for Doppler frequency estimation. To determine the noise subspace for the Root-MUSIC, we apply the EVD to the correlation matrix, as shown in (15), which yields the signal subspace
and the noise subspace
.
Then, the Root-MUSIC algorithm treats
in the MUSIC algorithm‘s
as a complex variable
, thus yielding
where
,
. The estimation of signal frequencies is thereby transformed from a search or exhaustive scanning problem into a root-finding problem for a univariate high-degree polynomial. Since we are only interested in the
-values closest to the unit circle, (36) can be transformed into
Equation (36) has a total of
roots, but only the
roots located on the unit circle are the desired solutions. Then, the Doppler frequency is estimated as
Based on the frequency estimate
for the range dimension and
for the Doppler dimension, the target’s distance and speed are estimated as follows:
To summarize, the CEEMD-SVD-FRM algorithm for joint range and velocity estimation was summarized in Algorithm 3, which systematically presents the procedural steps of the proposed method.
| Algorithm 3 The CEEMD-SVD-FRM algorithm for joint range and velocity estimation |
Require:
Ensure: the range and velocity between target(s) and radar
IMFs and a residual component. Directly discard the first-order IMF component. . largest singular values for signal reconstruction, largest singular values for signal reconstruction, as seen in (28). ). . . target, as presented in (39) target, as presented in (40)
|
4. Computational Complexity Analysis
In this section, the computational complexity of the proposed CEEMD-SVD-FRM algorithm is analyzed, using multiplication operations as the benchmark for complexity evaluation, since multiplication is generally more computationally intensive compared to other operations such as additions.
In the CEEMD-SVD-FRM algorithm, a signal with
chirps and
sampling points is first decomposed using CEEMD. After adding Gaussian noise
(where
) times and applying EMD,
IMFs are obtained through weighted averaging of the
IMF components from
layer. These IMF components, denoted as
, are then denoised IMFs using SVD, where the top
largest singular values are selected for signal reconstructions. The denoised IMFs and the residual signal are reconstructed, followed by range FFT and velocity estimation using the Root-MUSIC algorithm. Thus, the complexity of the CEEMD involves
iterations for each layer, where each iteration processes N samples. The complexity of the CEEMD step is
. After the CEEMD, calculating the correlation coefficient between each IMF component and the original signal requires
additions and multiplications. For
high-correlation IMFs, the SVD complexity is
for additions and
for multiplications. The complexity of one-dimensional FFT is
for both additions and multiplications, and the complexity of the Root-MUSIC algorithm is approximately
for both additions and multiplications. By focusing on the highest order of complexity, the primary influencing factors are simplified, and a complexities analysis of the computational complexities of the proposed algorithm, 2D-FFT [
9,
10], 2D-CZT (Chirp-Z Transform) [
36], 2D-MUSIC [
22,
37,
38], FFT-MUSIC [
20], and FFT-Root-MUSIC algorithms is conducted in terms of multiplications operation, as illustrated in
Table 2.
According to
Table 2, the proposed CEEMD-SVD-FRM algorithm for joint range and velocity estimation exhibits a computational complexity that is higher than that of the FFT-Root-MUSIC algorithm. Compared to the 2D-FFT, 2D-CZT, and FFT-MUSIC algorithms, its complexity is also greater, although it remains lower than that of the 2D-MUSIC algorithm. Notably, the CEEMD-SVD-FRM algorithm demonstrates superior resolution, estimation accuracy, and robustness in high-noise environments compared to the other four algorithms. Therefore, although there is an increase in computational complexity compared to traditional range and velocity estimation algorithms, the CEEMD-SVD-FRM algorithm still offers significant advantages, particularly in maintaining high resolution, high estimation accuracy, and strong robustness under low SNR conditions.
6. Conclusions
To address the issues of low-estimation accuracy, poor resolution, and weak robustness in existing joint range and velocity estimation algorithms, this study proposes a novel approach that combines CEEMD, SVD, FFT, and the Root-MUSIC algorithm. This approach is based on FMCW radar and is referred to as the CEEMD-SVD-FRM algorithm for joint range and velocity estimation.
First, the IF signal, which is contaminated with Gaussian white noise, is processed using CEEMD. An appropriate autocorrelation coefficient threshold is then determined to select the IMFs with high correlation. Subsequently, the SVD is employed to denoise the selected high-correlation IMFs. The denoised IMFs and the residual signal are then combined to reconstruct the signal. Next, FFT is applied to extract the frequency domain signal and perform peak detection. The frequency peak index I is used to obtain the frequency estimate in the range dimension, and the result for the lth target (among L targets, l = 1, …, L) is selected as the input for subsequent signal processing. The Root-MUSIC algorithm is then used to obtain the frequency estimate in the Doppler dimension. Finally, the range and velocity estimates of the target are calculated using the frequency estimates from both the range and Doppler dimensions. Through several experiments, it has been verified that the CEEMD-SVD-FRM algorithm effectively removes noise, preventing the loss of signal characteristics that can occur when performing direct Fourier transforms. As a result, this algorithm significantly enhances the accuracy and robustness of joint range and velocity estimation for target resolution in low SNR environments.
In the future, we will focus on optimizing the CEEMD-SVD denoising process or incorporating other methods to reduce the computational complexity of the algorithm. This optimization will have practical significance for the application of algorithms based on EMD.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}