
Novel Cost-Effective and Portable Three-Dimensional Force Measurement System for Biomechanical Analysis: A Reliability and Validity Study


Abstract
1. Introduction
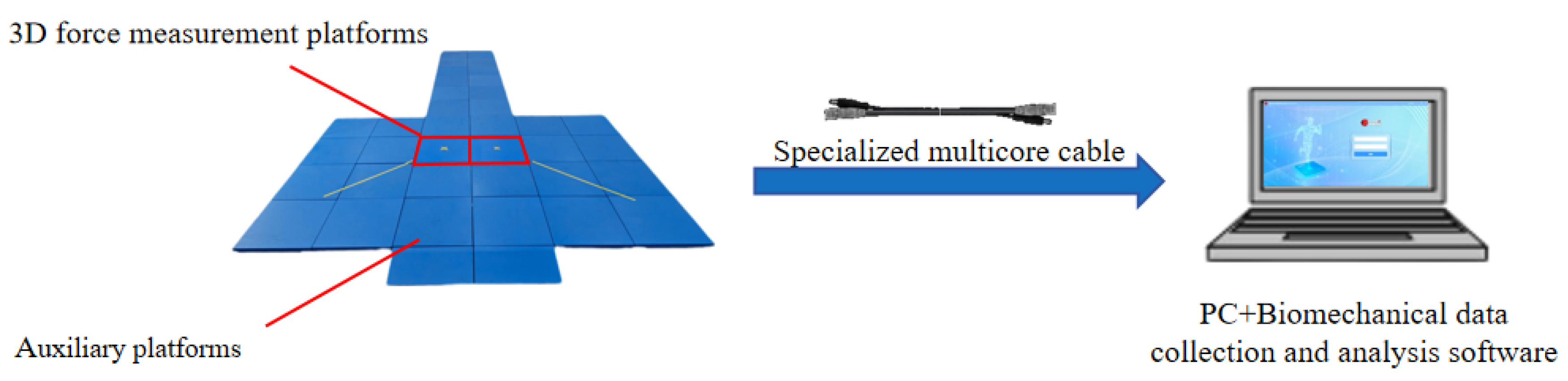
1.1. Structural Composition and Innovative Features of the KunWei Force Plate System
1.2. Definition of Coordinate System
2. Materials and Methods
2.1. Participants
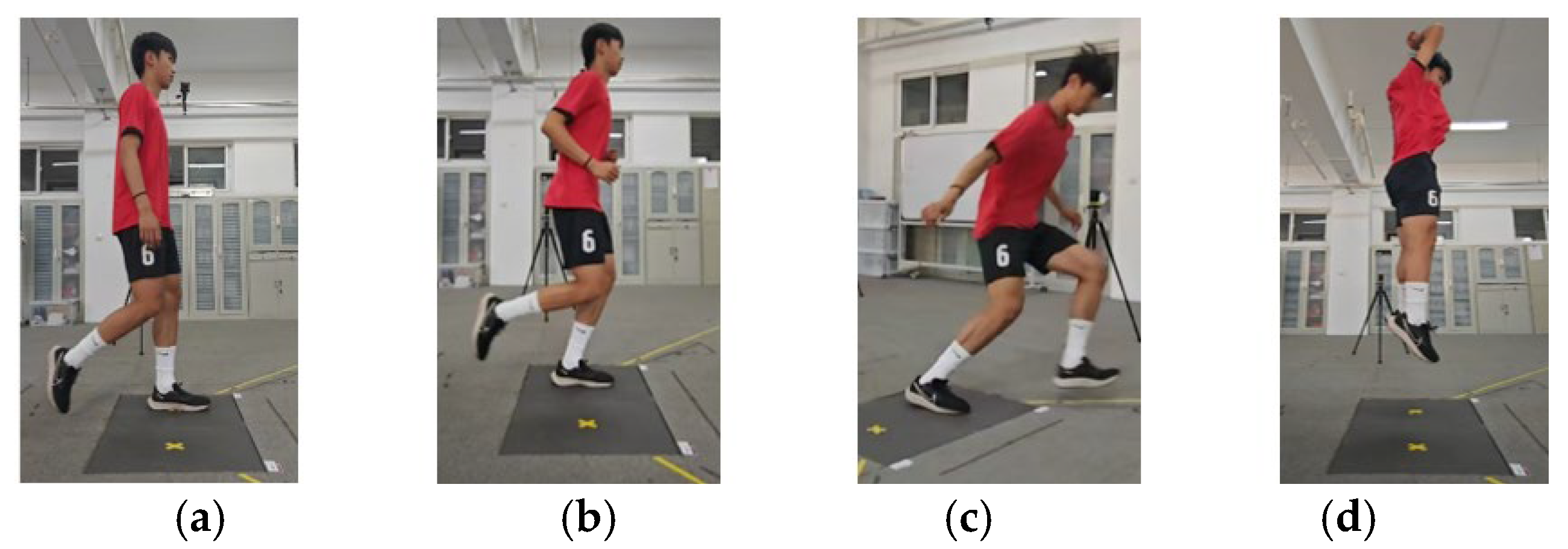
2.2. Experimental Design
2.3. Collection and Processing
2.4. Statistical Analysis
- MSB: Mean Square Between
- MSW: Mean Square Within
- k: The number of samples in each group
- MSE: Mean Square Error
- n: Total number of samples.
2.5. Ethics Statement
3. Result
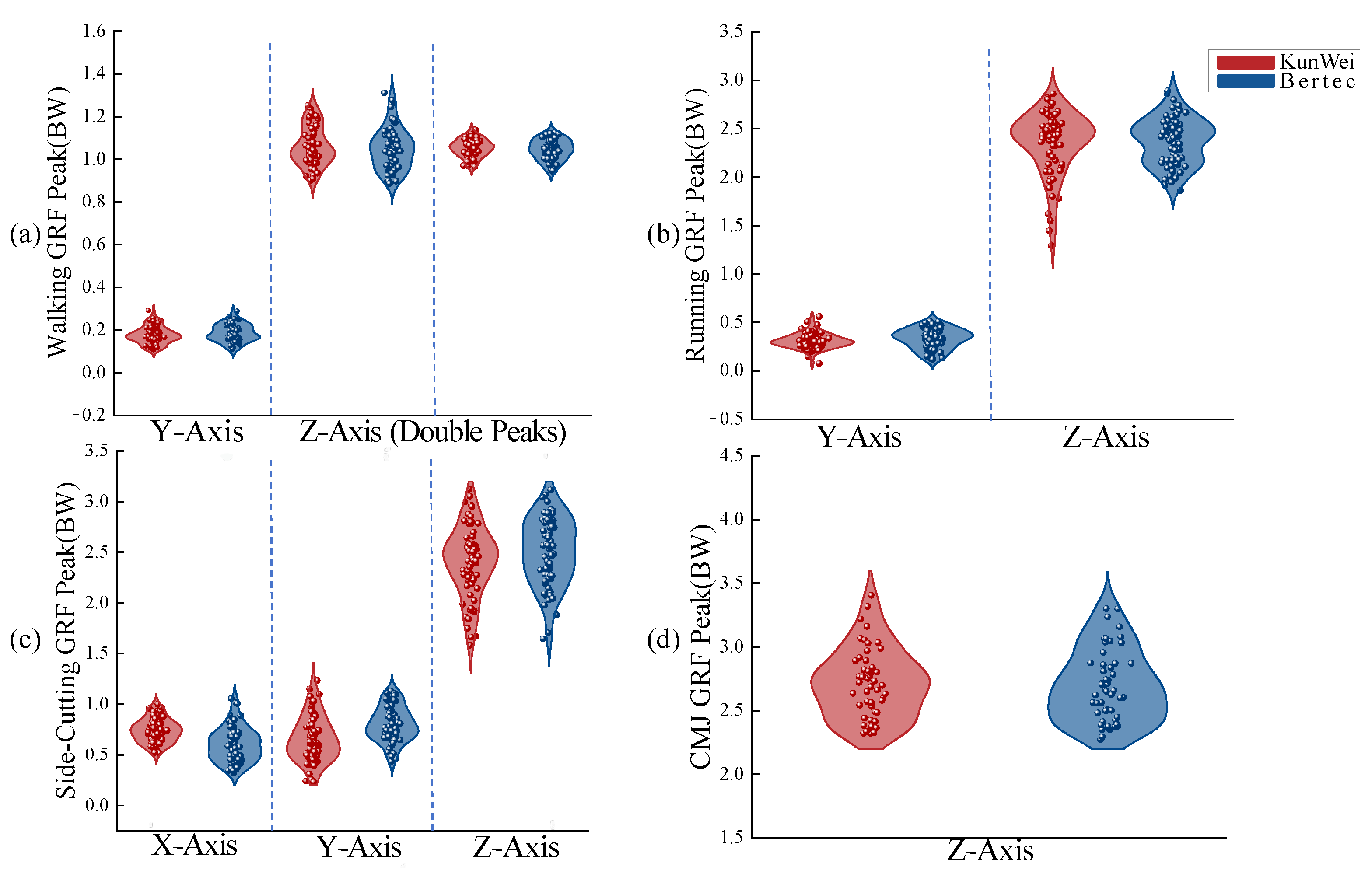
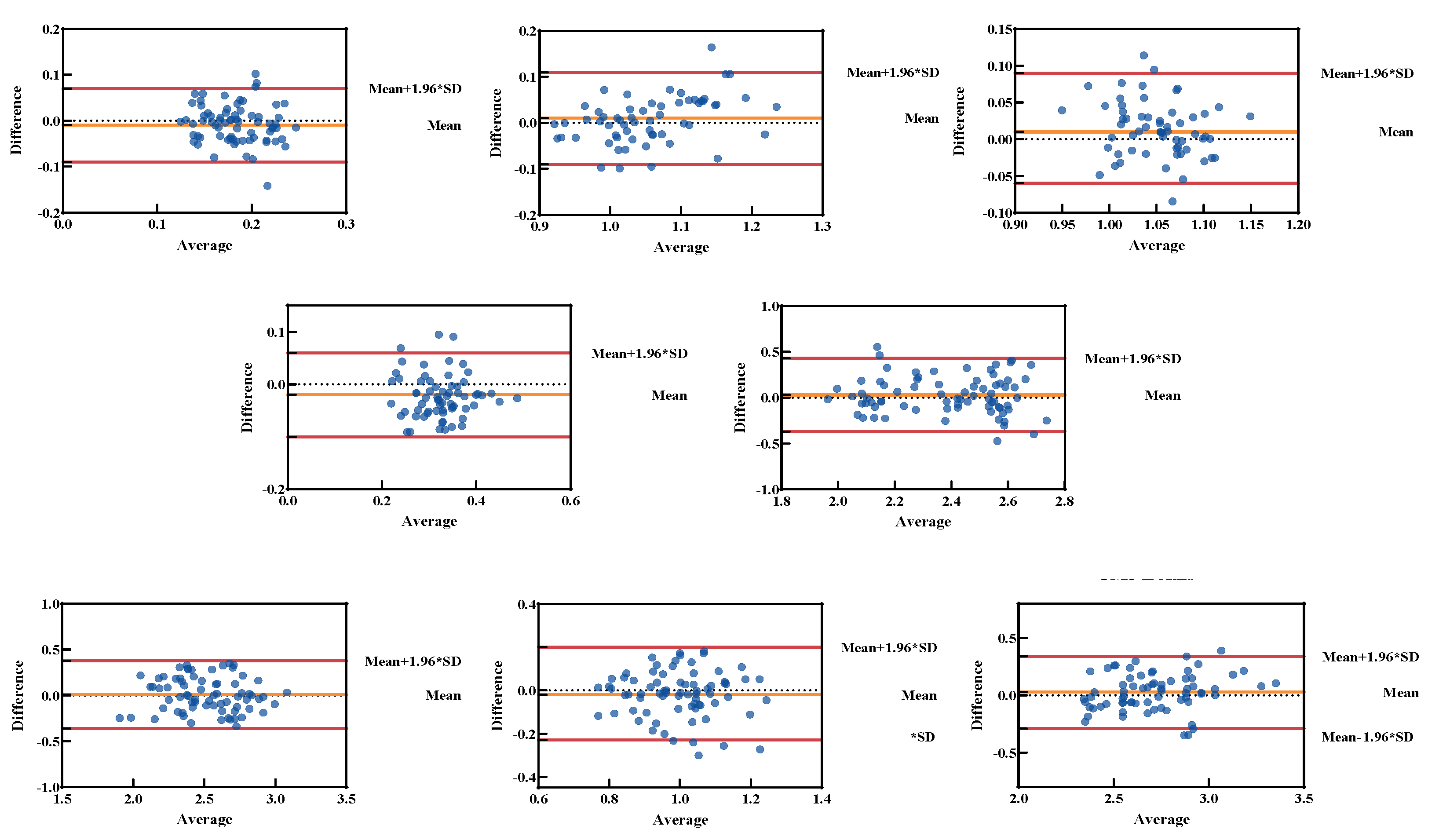
3.1. Peak Force t-Test
3.2. Phases of the Movement Cycles ICC
3.3. Phases of the Movement Cycles NRMSE
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnson, C.D. Relationships between tibial accelerations and ground reaction forces during walking with load carriage. J. Biomech. 2023, 156, 111693. [Google Scholar] [CrossRef] [PubMed]
- van der Worp, H.; Vrielink, J.W.; Bredeweg, S.W. Do runners who suffer injuries have higher vertical ground reaction forces than those who remain injury-free? A systematic review and meta-analysis. Br. J. Sports Med. 2016, 50, 450–457. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C.D.; Tenforde, A.S.; Outerleys, J.; Reilly, J.; Davis, I.S. Impact-related ground reaction forces are more strongly associated with some running injuries than others. Am. J. Sports Med. 2020, 48, 3072–3080. [Google Scholar] [CrossRef] [PubMed]
- Pietrosimone, B. Greater mechanical loading during walking is associated with less collagen turnover in individuals with anterior cruciate ligament reconstruction. Am. J. Sports Med. 2016, 44, 425–432. [Google Scholar] [CrossRef]
- Dos’ Santos, T.; Thomas, C.; Comfort, P.; Jones, P.A. The effect of angle and velocity on change of direction biomechanics: An angle-velocity trade-off. Sports Med. 2018, 48, 2235–2253. [Google Scholar] [CrossRef]
- Honert, E.C.; Hoitz, F.; Blades, S.; Nigg, S.R.; Nigg, B.M. Estimating running ground reaction forces from plantar pressure during graded running. Sensors 2022, 22, 3338. [Google Scholar] [CrossRef]
- Gokeler, A.; Seil, R.; Kerkhoffs, G.; Verhagen, E. A novel approach to enhance ACL injury prevention programs. J. Exp. Orthop. 2018, 5, 22. [Google Scholar] [CrossRef]
- McKeon, P.O. Balance training improves function and postural control in those with chronic ankle instability. Med. Sci. Sports Exerc. 2008, 40, 1810–1819. [Google Scholar] [CrossRef]
- Lugrís, U.; Carlín, J.; Pàmies-Vilà, R. Solution methods for the double-support indeterminacy in human gait. Multibody Syst. Dyn. 2013, 30, 247–263. [Google Scholar] [CrossRef]
- Manupibul, U. Integration of force and IMU sensors for developing low-cost portable gait measurement system in lower extremities. Sci. Rep. 2023, 13, 10653. [Google Scholar] [CrossRef]
- Raymond, F. Using Portable Force Plates to Assess Vertical Jump Performance: A Metrological Appraisal. Sports 2018, 6, 149. [Google Scholar] [CrossRef] [PubMed]
- Recinos, E.; Abella, J.; Riyaz, S.; Demircan, E. Real-time vertical ground reaction force estimation in a unified simulation framework using inertial measurement unit sensors. Robotics 2020, 9, 88. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. A wearable force plate system designed using small triaxial force sensors and inertial sensors. Adv. Biomed. Sens. Meas. Instrum. Syst. 2010, 55, 61–73. [Google Scholar]
- Rebelo, A.; Martinho, D.V.; Valente-dos-Santos, J.; Coelho-e-Silva, M.J.; Teixeira, D.S. From data to action: A scoping review of wearable technologies and biomechanical assessments informing injury prevention strategies in sport. BMC Sports Sci. Med. Rehabil. 2023, 15, 169. [Google Scholar] [CrossRef]
- Singh, A.P.; Ghoshal, S.K.; Kumar, H. Development and Metrological Evaluation of an Industrial Force Transducer. MAPAN 2020, 35, 165–176. [Google Scholar] [CrossRef]
- Skals, S.; Jung, M.K.; Damsgaard, M. Prediction of ground reaction forces and moments during sports-related movements. Multibody Syst. Dyn. 2017, 39, 175–195. [Google Scholar] [CrossRef]
- Lichtwark, G.A.; Schuster, R.W.; Kelly, L.A.; Trost, S.G.; Bialkowski, A. Markerless motion capture provides accurate predictions of ground reaction forces across a range of movement tasks. J. Biomech. 2024, 166, 112051. [Google Scholar] [CrossRef]
- Warathanagasame, P.; Sakulsriprasert, P.; Sinsurin, K.; Richards, J.; McPhee, J.S. Comparison of Hip and Knee Biomechanics during Sidestep Cutting in Male Basketball Athletes with and without Anterior Cruciate Ligament Reconstruction. J. Hum. Kinet. 2023, 87, 17–27. [Google Scholar] [CrossRef]
- Bobak, C.A.; Barr, P.J.; O’Malley, A.J. Estimation of an inter-rater intra-class correlation coefficient that overcomes common assumption violations in the assessment of health measurement scales. BMC Med. Res. Methodol. 2018, 18, 93. [Google Scholar] [CrossRef]
- Koo, T.K.; Li, M.Y. A Guideline of Selecting and Reporting Intraclass Correlation Coefficients for Reliability Research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef]
- Shieh, G. A comparison of two indices for the intraclass correlation coefficient. Behav. Res. Methods 2012, 44, 1212–1223. [Google Scholar] [CrossRef] [PubMed]
- Castelletti, A.; Galelli, S.; Restelli, M.; Soncini-Sessa, R. Data-driven dynamic emulation modelling for the optimal management of environmental systems. Environ. Model. Softw. 2012, 34, 30–43. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z. A hybrid model for water quality prediction based on an artificial neural network, wavelet transform, and long short-term memory. Water 2022, 14, 610. [Google Scholar] [CrossRef]
- Hodson, T.O. Root mean square error (RMSE) or mean absolute error (MAE): When to use them or not. Geosci. Model. Dev. Discuss. 2022, 15, 5481–5487. [Google Scholar] [CrossRef]
- El Khattabi, M.-Z.; El Jai, M.; Lahmadi, Y.; Oughdir, L.; Rahhali, M. Understanding the interplay between metrics, normalization forms, and data distribution in K-means clustering: A comparative simulation study. Arab. J. Sci. Eng. 2024, 49, 2987–3007. [Google Scholar] [CrossRef]
- Johnson, W.R.; Mian, A.; Donnelly, C.J.; Lloyd, D.; Alderson, J. Predicting athlete ground reaction forces and moments from motion capture. Med. Biol. Eng. Comput. 2018, 56, 1781–1792. [Google Scholar] [CrossRef]
- Butler, L.S. Reliability of the cutting alignment scoring tool (CAST) to assess trunk and limb alignment during a 45-degree side-step cut. Int. J. Sports Phys. Ther. 2021, 16, 312. [Google Scholar] [CrossRef]
- Miller, D.M. The parallelogram rule from pseudo-Aristotle to Newton. Arch. Hist. Exact. Sci. 2017, 71, 157–191. [Google Scholar] [CrossRef]
- DeMaris, A.; Selman, S.H.; DeMaris, A.; Selman, S.H. Additional Inferential Procedures. In Converting Data into Evidence: A Statistics Primer for the Medical Practitioner; Springer: New York, NY, USA, 2013; pp. 39–55. [Google Scholar]
- Ionan, A.C.; Polley, M.-Y.C.; McShane, L.M.; Dobbin, K.K. Comparison of confidence interval methods for an intra-class correlation coefficient (ICC). BMC Med. Res. Methodol. 2014, 14, 121. [Google Scholar] [CrossRef]
- Chang, R.; Kent-Braun, J.; Van Emmerik, E.; Hamill, J. 2nd Congress of the International Foot and Ankle Biomechanics Community. J. Foot Ankle Res. 2014, 7, A1–A136. [Google Scholar]
- Zeng, Z.; Liu, Y.; Hu, X.; Tang, M.; Wang, L. Validity and Reliability of Inertial Measurement Units on Lower Extremity Kinematics During Running: A Systematic Review and Meta-Analysis. Sports Med. Open 2022, 8, 86. [Google Scholar] [CrossRef] [PubMed]
- Senthil Kumar, V.; Shahraz, S. Intraclass correlation for reliability assessment: The introduction of a validated program in SAS (ICC6). Health Serv. Outcomes Res. Methodol. 2024, 24, 1–13. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Takahashi, Y.; Sasaki, Y. Prediction of Three-Directional Ground Reaction Forces during Walking Using a Shoe Sole Sensor System and Machine Learning. Sensors 2023, 23, 8985. [Google Scholar] [CrossRef] [PubMed]
- Rössler, R. Spatiotemporal gait characteristics across the adult lifespan: Reference values from a healthy population—Analysis of the COmPLETE cohort study. Gait Posture 2024, 109, 101–108. [Google Scholar] [CrossRef]
- Stoeve, M.; Schuldhaus, D.; Gamp, A.; Zwick, C.; Eskofier, B.M. From the Laboratory to the Field: IMU-Based Shot and Pass Detection in Football Training and Game Scenarios Using Deep Learning. Sensors 2021, 21, 3071. [Google Scholar] [CrossRef]
- Mao, C. The Validity of a Dual-Force Plate for Assessing Counter-Movement Jump Performance. Sensors 2024, 24, 5748. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Rated Value | Nonlinearity | Sample Frequency |
|---|---|---|---|
| Force | XY: ±2500 [N] Z: ±5000 [N] | ≤ ±0.2 [%FS] | 50–1600 [Hz] |
| Moment | XYZ: ±950 [N·m] |
| Component | Width | Depth | Height | Weight |
|---|---|---|---|---|
| Measurement platform | 500 [mm] | 600 [mm] | 50 [mm] | 12 [kg] |
| Auxiliary platform | 40–60 [mm] | 8 [kg] |
| Variables | KunWei | Bertec | p Value | 95% CI (Difference) 1 | Pearson r | B | ||
|---|---|---|---|---|---|---|---|---|
| M ± SD (BW) | CV (%) | M ± SD (BW) | CV (%) | |||||
| Walking-Y | 0.177 ± 0.037 | 20.9 | 0.186 ± 0.040 | 21.5 | 0.138 | −0.020~0.003 | 0.373 | 0.330 |
| Walking-Z | 1.062 ± 0.090 2 1.052 ± 0.040 | 8.5 3.8 | 1.049 ± 0.098 1.045 ± 0.048 | 9.3 4.6 | 0.479 0.351 | −0.023~1.049 −0.009~0.024 | 0.813 0.677 | 1.059 0.542 |
| Running-Y | 0.308 ± 0.078 | 25.3 | 0.330 ± 0.102 | 30.9 | 0.136 | −0.500~0.007 | 0.759 | 0.741 |
| Running-Z | 2.400 ± 0.226 | 9.4 | 2.372 ± 0.237 | 10.0 | 0.227 | −0.018~0.076 | 0.610 | 0.583 |
| Side-cutting-X | 0.738 ± 0.118 * | 16.0 | 0.603 ± 0.172 | 28.5 | <0.001 | 0.077~0.194 | 0.621 | 0.596 |
| Side-cutting-Y | 0.651 ± 0.223 * | 34.3 | 0.806 ± 0.172 | 21.3 | <0.001 | −0.235~−0.077 | ||
| Side-cutting-Z | 2.416 ± 0.340 | 14.1 | 2.404 ± 0.588 | 24.5 | 0.881 | −0.156~0.181 | 0.760 | 0.870 |
| CMJ-Z | 2.717 ± 0.627 | 23.1 | 2.693 ± 0.259 | 9.6 | 0.277 | −0.020~0.069 | 0.843 | 0.895 |
| Variables | X-Axis | Y-Axis | Z-Axis | |||
|---|---|---|---|---|---|---|
| r | 95% CI 1 | r | 95% CI | r | 95% CI | |
| Walking | 0.950 | 0.945~0.956 | 0.999 | 0.999~0.999 | 0.999 | 0.999~0.999 |
| Running | 0.912 | 0.892~0.927 | 0.999 | 0.999~0.999 | 0.999 | 0.999~0.999 |
| Side-Cutting | 0.993 | 0.992~0.994 | 0.998 | 0.985~0.990 | 0.996 | 0.995~0.996 |
| CMJ | 0.909 | 0.899~0.919 | 0.998 | 0.995~0.999 | 0.999 | 0.999~1.000 |
| Variables | T-test | ICC | NRMSE | |||
|---|---|---|---|---|---|---|
| KunWei (BW) | Bertec (BW) | p Value | r | 95%CI | ||
| Horizontal Force | 0.972 ± 0.196 | 0.995 ± 0.181 | 0.539 | 0.986 | 0.983~0.988 | 0.047 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, L.; Yin, C.; Duan, X.; Wang, Z.; Zhang, M. Novel Cost-Effective and Portable Three-Dimensional Force Measurement System for Biomechanical Analysis: A Reliability and Validity Study. Sensors 2024, 24, 7972. https://doi.org/10.3390/s24247972
Hao L, Yin C, Duan X, Wang Z, Zhang M. Novel Cost-Effective and Portable Three-Dimensional Force Measurement System for Biomechanical Analysis: A Reliability and Validity Study. Sensors. 2024; 24(24):7972. https://doi.org/10.3390/s24247972
Chicago/Turabian StyleHao, Letian, Chao Yin, Xiaozhe Duan, Zeyu Wang, and Meizhen Zhang. 2024. "Novel Cost-Effective and Portable Three-Dimensional Force Measurement System for Biomechanical Analysis: A Reliability and Validity Study" Sensors 24, no. 24: 7972. https://doi.org/10.3390/s24247972
APA StyleHao, L., Yin, C., Duan, X., Wang, Z., & Zhang, M. (2024). Novel Cost-Effective and Portable Three-Dimensional Force Measurement System for Biomechanical Analysis: A Reliability and Validity Study. Sensors, 24(24), 7972. https://doi.org/10.3390/s24247972